
Abstract
Smart farming is one of the immense applications of Wireless Sensor Networks (WSN). Still, most of the researches have been focusing on precision agriculture using WSNs. In general, the nodes within the wireless sensor systems are self-configured. Based on the application requirement, gadgets within the region of interest collect data, prepare it, and send it to the recipient. The biggest impediments to these sensor systems are collision, restricted battery, and transmission capacity. Due to these characteristics, the node battery depletes earlier, when it starts working. Currently, agriculture depends on rain due to the lack of water resources and irrigation services. The crop development depends totally on the factors of water, the climatic conditions of the soil, etc. In large-scale agriculture, it is exceptionally problematic to analyze all the parameters accurately throughout the growing field. In this article, high-precision architecture for large-scale agriculture has been proposed. An IoT (Internet of Things) enabled WSN has been built and installed in the respective areas to measure the physical quantities regularly. In addition, Lévy-Walk Bat (LWBA) algorithm has been proposed to optimize the collected data. The prediction accuracy of the collected data is evaluated by LWBA and then, it is compared with the existing optimization algorithms with different error solvers. It has provided the exact information regarding the whole landscape and it will help the farmers to irrigate precisely.
Keywords
Introduction
Agriculture is one of the essential practices since the beginning of civilization. Much iteration has been carried out in different decades to improve the quality of agriculture. The climatic condition changed dramatically in the last decades and it had a significant impact on agriculture. Traditional agriculture is difficult to cope with these climatic changes. Subsequently, new cultivation methods are needed to increase the productivity. The main applications of WSN include forest fire observation, habitat observation, reactor control applications, and household knowledge [1]. The nodes in the WSN are small in size, and the hardware parts of the devices are also restricted in extent [2].
In order to enhance the energy utilization in the network, the nodes have undergone periodic scheduling mechanisms. The data collected from the land field are not continuous one. It implies the data accuracy issue at the output. To address these issues, several optimization schemes have been introduced.
After implementation, the nodes in the application field are associated together and they form the network. Once the system has been built, sensors from the respective region accumulate the data that encompass them. The collected information is processed by the signal processing unit within the device and forwarded to the sink. The sink node is a special purpose node that can connect the outside world with the sensor network. The communication between the nodes and the sink can be terminated by employing single hop or multiple hops [3, 4]. The distance between the sink and the desired node is less than the single-hop communication and it is enabled and vice versa. If the region of interest is vast, a cluster-based design is used. Nodes within the detection range are grouped and they have framed the clusters. Each group within the field contains a base station or cluster head (CH) and a group of members (i.e., cluster members (CM)). After detecting the events, the cluster members transmit the detected event to their particular CH. By receiving the individual data, the CH works on the information such as averages, maximization and minimization [5].
Actuators are hardware devices that play an imperative role in the smart sensor network. The actuators will be controlled using the prediction output of the sensor networks. The output of the particular groups is used to manage the actuators in the respective area. In the agriculture field, water will be dropped over the entire field as required by the knob control [6]. Selecting an appropriate algorithm plays a vital role in any optimization technique [7]. The primary use of an optimizer is to achieve the best possible solution. A particular algorithm is not suitable for all problems. There are different optimization schemes, including derivative-based, derivative-free, and bio-inspired optimizations. Derivative and derivative-free-based systems are identified as classical optimization techniques, such as gradient-based or matrix-based methods [8, 9]. Most bio-inspired optimizations use pattern matrix schemes to provide a random prediction of particular problems and they enable the exchange of information between swarm locations and their outputs with considerable improvement.
Derivative-based algorithms utilize derivative information and they have been widely used in applications such as scientific and discrete modeling [10, 11]. This algorithm’s main drawback is that it falls into the local optimum, if the problem is not convex. But, this kind of algorithm has been widely applied to solve the optimization problems without obstacles, such as energy reduction, etc. [12]. Algorithms without derivatives use the value of objective function instead of derived information. Even the discontinuities present in the cost functions can act efficiently. Bio-mimetic/nature-inspired algorithms are the best suited for global optimization. There are a variety of meta-heuristic or bio-inspired algorithms available for optimization, including Particle Swarm Optimization (PSO), Genetic Algorithm (GA), Ant Colony Optimization (ACO), Cuckoo Search (CS), Bat Algorithm (BA), etc. PSO is a population based swarm intelligence technique widely used in WSNs. The general application examples are deployment, location identification, clustering & CH election and data aggregation. It is a simple and lightweight algorithm compared to many classical approaches [13]. GA is a heuristic algorithm which is inspired by Darwin’s theory. It imitates the natural selection process and the best fittest one is selected for reproduction. The initial population, fitness function, selection, crossover and mutation are the main five phases of GA [14]. The main objective of the ACO is to find the optimum paths and this algorithm has evolved from the behavior of ants, seeking the path for their colony and food. ACO has been widely used to solve different kinds of optimization issues [15]. Cuckoo Search (CS) is an optimization technique, which has been developed based on the nature of cuckoo laying their eggs in the nests of other hosts. Once the host identifies the cuckoo’s eggs, it simply throws away the eggs or discards its nest. This process can be applied in many optimization issues in real time [16]. Bat Algorithm (BA) is a meta-heuristic optimization approach, inspired on the echolocation activities of bats. The echolocation ability of the micro-bats is used to find their prey. This property can be used to differentiate various types of insects even in the dark environment. [17, 18].
Further, this paper has been organized as follows; the introduction, application and the limitations of the WSNs are given in section 1. Section 2 contains the detailed survey of different approaches related to optimization schemes and agriculture. The proposed hardware model and LWBA system are presented in section 3. Section 4 discusses the results and the analysis of the proposed as well as the existing approaches and the conclusion is provided in section 5.
Literature survey
The challenges facing the agriculture field, such as climate change, water shortage and labor shortage are discussed. In this work, an approximate model has been proposed to communicate the landscape’s data to the outside world. Further, the authors have discussed how the sensor model increases crop productivity and reduces cultivating cost based on the sensor model’s prediction result [19].
The existing methods have been surveyed to implement WSNs. Here, the authors have analyzed WSNs in terms of different technologies. The detailed analysis of various techniques such as Bluetooth, RF, Wi-Fi, and WSN based on Zigbee has been performed. Various other problems at the WSN are also discussed and finally, it is concluded with new developments in agriculture [20].
Smart farming has been implemented with intelligent routing using WSN. This work tries to minimize human error, as well as to increase crop yield. The automated system developed by the authors optimally measures the system. A new routing scheme called recommendation routing efficiently addresses the traffic and handles delay, power, and throughput. The objective of this work is to automate crop management using WSN [21].
This article clearly explains how to use the sensors in the agricultural field [22]. Various routing protocols are also discussed for data transmission in the area of interest. Also, the LEACH protocol workflow is explained and incorporated in the field of agriculture. The results of this approach are evaluated with metrics, delay, throughput, and energy.
The objective of this research is to minimize water consumption and increase productivity [23]. This proposed model monitors parameters such as humidity, temperature, and humidity of the observation field using WSN. The built-in sensor model with IoT technique is used to inform end-users.
A modern farming scheme has been suggested using WSN. In this approach, the nodes in the detection area continuously observe the crops. The physical parameters of humidity, temperature, and intruders’ detection are monitored by a respective sensor and this process maximizes productivity [24]. A review of energy-efficient WSNs has been presented for precision agriculture [25]. A detailed analysis has been carried out in this review on different wireless technologies such as Blue-tooth, WI FI, etc. In [26], the authors have proposed precision agriculture based on WSN associated with the MQTT Protocol. In this scheme, IoT is used to connect and collect information about the field of interest. The authors have presented the WSN integrated with irrigation system and a prototype [27].
Given optimizations in WSNs, the optimization algorithm’s choice plays a vital role [7]. The optimization algorithm related to the given task will depend on the type of problem, desired quality, resources, nature of the algorithm, and the time constraints. Classic algorithms are not suitable, when the given problem is exceptionally non-linear and multimodal and hence, they are local search schemes. The WSN node has limited energy resources, and the issues to be addressed by optimization are identified as NP-hard problems. The cost of programming on small devices for these cases is recognized as unattractive. The computational complexities of the existing schemas increase with the increase in problem size. The bio-mimetic schemes (i.e., ACO, BA, CS, GA, and PSO) are chosen to address the issues.
Beeharry et al. have suggested and implemented a dynamic weather forecast system. The performance of the presented system is evaluated using different prediction algorithms and validated using the K-nearest neighbor algorithm and multiple linear regression models. The statistical analysis is made on the data to prove the accuracy of the system [31]. Stefan Preda et al. have proposed a prediction system for PV stations using SVM. The solar radiation parameters are normalized using the sigmoid function. The nonlinear and time differentiated data can be efficiently classified using SVM. The performance of the presented system has been ensured by comparing with the autoregressive algorithm [32].
Junho Lee et al. have designed a system equipped with an ensemble algorithm to predict solar irradiance. It analyzes the solar irradiance and the outcomes are evaluated with statistical analysis. Different algorithms like RF, SVM are used to analyze the error criteria. The better prediction accuracy is attained by integrating the ensemble method with multiple regressions [33]. V. P. Kour and S. Arora have surveyed the recent improvements of IoT in the agriculture field. The current developments in the hardware and software are analyzed and tabulated. The various startups and the projects from the government and private sectors are also discussed along with the recent trends in precision agriculture [34]. Mekonnen et al. have made a comprehensive report on machine learning algorithms in WSNs for smart agriculture. Further, the case studies are discussed on IoT based smart data-driven module for the agricultural ecosystem [35].
The survey of literature has been made on various optimization approaches as listed above. According to the existing approaches, the sensors have undergone different scheduling mechanisms and they need to be optimized. Consequently, the proposed optimization problem has been formulated as a bi-level linear programming. To optimize the measured output, LWBA optimization algorithm has been developed. The importance of the proposed LWBA is that it would not stick into the local optima.
IoT based hardware module and LWBA algorithm implementation
Temperature, moisture, and humidity are the vital parameters for crops. These parameters need to be thoroughly analyzed to ensure the growth of the plant. A variety of plant types has different levels of temperatures and humidity. The respective sensors are used to examine and control moisture and other physical quantities. In this proposed architecture, the entire agricultural field has been classified into several groups. For each group, a CH is designated to control all group members using the LEACH approach (i.e., in every round, the role of CH is taken by different members) [22]. Devices deployed in the area of interest detect temperature, humidity, and moisture levels in the respective fields. In general, the application area parameters will be identified in terms of periodic monitoring and demand-based event detection. According to this proposed scheme, the details of the application area are collected periodically. Once the CH is chosen in the respective groups, it begins to receive its members’ data. The Time Division Multiple Access (TDMA) based approach is considered to avoid collisions.
Redundant nodes are implemented in the respective area to improve data collection’s precision, as in Fig. 1. However, the energy of the nodes runs out, when it starts working. A new scheduling mechanism has been used to reduce the energy used by the devices. The nodes are alternately assigned to sleep mode periodically to save power. The information which belongs to the sleep state nodes is not registered. Therefore, it generates an optimization problem. Optimization schemes such as Linear Regression (LR), Regression Tree, and Support Vector Machine (SVM) are implemented to predict periodic measurement data in order to ensure optimized results. The optimized value will provide landscape scarcity accurately [28]. This present article proposes an LWBA algorithm that provides optimal result. The respective schemes’ numerical results are compared and validated to analyze the suggested LWBA algorithm’s effectiveness.
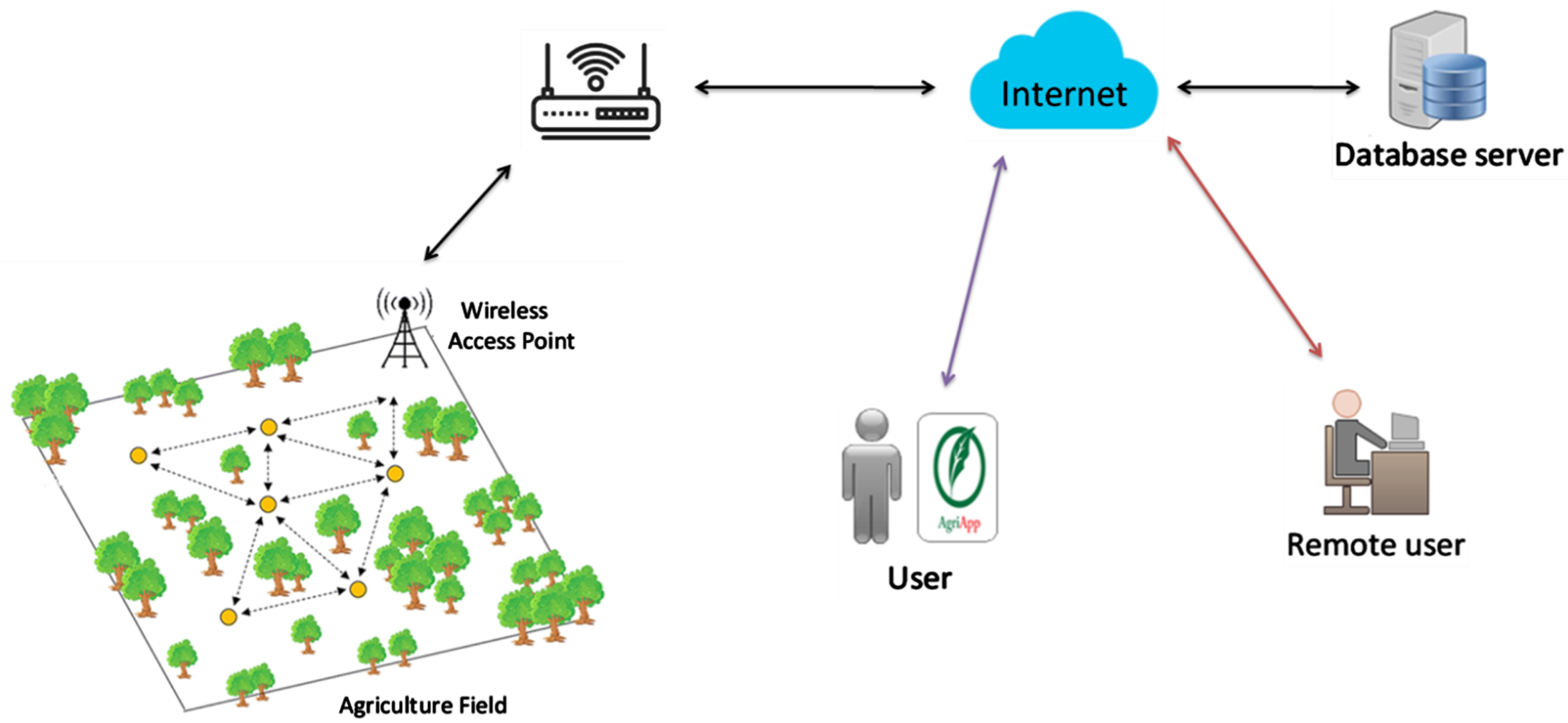
Proposed high precision architecture for large scale agriculture.
Once the sink node processes the results, it stores them in the cloud environment [29]. Data can be retrieved from the cloud at any time from the outside world. The cluster head information data are used to activate the actuator mechanism. Numerical data analyze the land field with water shortage, and the corresponding actuator is activated to provide the necessary water supply.
This proposed agriculture approach is validated by implementing a prototype model, as shown in Fig. 2. The prototype uses an ESP32 controller to collect and process the data and it is well suited for most Internet of Things (IoT) applications. It integrates a communication subsystem, an RF/power amplifier subsystem, a low noise amplifier, filters, and power management entities. The main features of ESP32 are low power chips, clock sync, dynamic power scale, and different power modes to save power. This ESP32 controller wakes up periodically and collects the data around it by using suitable sensors. The energy expended by the chip is controlled by low duty cycle/adaptive duty cycle mechanisms. It also contains an adjustable power amplifier that balances the communication area, data rate, and power usage.
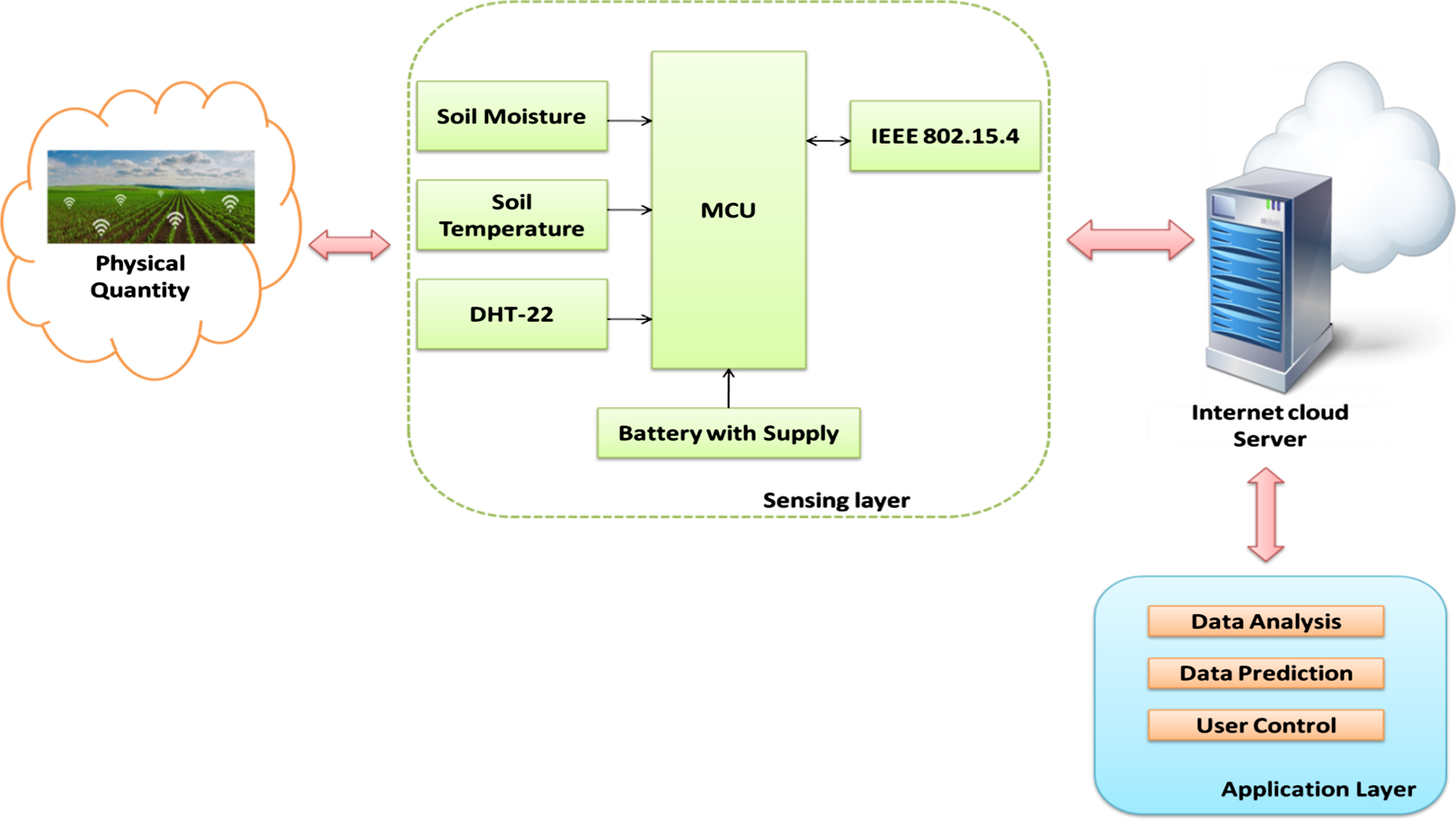
Data flow diagram of the proposed system.
The soil moisture level is measured using the FC-28 sensor. It gives the output in terms of analog and digital behaviors. Therefore, this sensor can be connected to the ESP32 in analog/digital mode. This sensor’s analog output varies from 0 to 1023 and it can be represented in percentage by the following equation.
The DHT22 is a temperature and humidity sensor whose output is in digital form. It can be connected directly to the ESP32, and no analog input section is required. This sensor measures the humidity value of the surrounding air.
To prolong the life time of WSNs, scheduling approach has been incorporated. Due to the scheduling behavior, the nodes are unable to monitor the area of interest during sleep time. This scenario is defined as hypotheses H1 and H2 which lead to an optimization issue and is formulated as a bi-level model. ACO, GA and PSO are the widely used soft computing techniques to provide proven results for bi-level issues. To model the decentralized decisions, the technique like bi-level linear programming is used. In this work, LWBA optimization algorithm has been used to solve the optimization problem for data prediction. The major advantages of LWBA algorithm are: implementation of hardware/software is less complex, more availability of parameter choosing, optimum solutions, fast convergence and applicable in both binary & real environments.
Most heuristic and meta-heuristic optimizations are derived from biological behaviors in nature. The bat algorithm (BA) works on the principle of bat echolocation activities. Micro-bats echolocation ability is intriguing, as these bats can discover their prey and filter various types of creepy even in complete darkness. Initially, bat optimization is determined by implementing bat echolocation activities. In BA, the optimal solution for the given optimization problem is indicated by the bats [17].
The output emission of the sensor node can be defined in the range of [0.1]. Therefore, the activity of the sensor node is described by,
The bats’ position is calculated by the ith echolocation of the bat and it is represented as, E
i
={ Ei,1, E1,2, …, Ei,D } ∈ U
i
= { ui,1, ui,2 … . ui,D }. The fitness value E
i
defines the best location of bat echolocation. First, bats are unaware of the best possible place of the optimal amount R (τ). Furthermore, bats create a random distribution of inhabitants Q of M incremented solutions F (τ) where M is the number of bats in the population.
The number of sensor nodes in the given region is ‘N’ and the detection probability (P
d
) of each sensor can be defined by,
The target detection probability of sensor with null output
The average probability of detection is computed by,
Where,
The optimization problem formulated to F (τ) = F0 (τ) + F1 (τ) by 0 < τ < T and it can be considered as,
The local search is performed using the bats’ random walk after the creation of new optimal solutions. If the pulse emission rate is lower than the random number,
The new
The new optimized
Where γ ss is the step size in the range of [0, 1], the parameter that belongs to Levy’s flight distribution is RW (t), B vr Levy is used to represent the Levy distribution, and ⊕ describes the process of multiplication done at entry-wise.
The characteristic function of the Levy Random Walk distribution is calculated by [30],
The Mantegna’s algorithm has used to carry out the levy flight distribution [ref], the RW (t) can be calculated by,
Furthermore, the loudness value L
i
and the emission rate z_i are revised according to the iterations performed. Subsequently, L
i
decreases, when a bat identifies its prey. For the increase in z
i
, L
i
will keep any value in the distribution range.
This proposed prototype application follows an alternate duty cycle to reduce the energy usage. The sensor detects the area of interest periodically, leading to optimization errors in the results. As a result in this approach, the outputs of the sensor are optimized by LWBA along with three different optimization algorithms, namely Linear Regression (LR), Regression Tree (RT), and Support Vector Machine (SVM). Linear regression (LR) is used to fit a prediction model for sensing the device’s observed results. After constructing LR, additional values of the descriptive variables are collected without the help of response value. The fitted model is used to predict the response. This analysis is applied to list the strength between the reaction and the descriptive variables as well as to identify their subsets.
The regression tree is an optimization model that visualizes rational decisions at each step, and it has the option of adding priority to decision criteria. A decision based on the regression tree is much simpler than other methods, as irrelevant data are filtered at each step, and the algorithm is used to work with fewer data in the tree. Various machine learning methods are derived from the premise of statistical learning. SVM is one of the best machine learning algorithms of all those schemes, as it has optimal classification precision and improved generalization ability. Besides, it efficiently addresses over-fitting issues. Hence, SVM has been widely applied in the field of classification and regression.
During the training phase, to reduce the error values between the actual and predicted data the fitness function F
ev
can be used.
The error values of three algorithms are calculated using RMSE, R2, MSE, and MAE through MATLAB. The following equations define the four analytical error criteria as discussed above.
The root mean square error (MSE) and the root mean square error (RMSE) are the measures to predict the target values with estimated precision and they compare a predicted value and an actual value.
MAE is a simple regression error measure that is used to determine the residual of all data points and the magnitude of all residuals is shown. A simpler MAE prediction model is described in the following equation,
R2 represents the proportion of variance in the dependent variable. If the value of R2 is 1, it provides the accurate and perfect predicted data, and if the value of R2 is zero, it represents the failure regression model.
The variables X
i
,
This experimental work has been carried out in an agricultural field and the data of agricultural climate and environmental are collected through IoT. The collected data set contains soil moisture, soil temperature, humidity, and air temperature. Out of the collected data set, 75% is used for training, and 25% for testing. The Levy-Walk Bat algorithm has been proposed to predict accurate data for the Internet of Things application. Simulation analyses of air and soil temperature (0–5) cm, soil moisture, and humidity are performed using the MATLAB simulator, and the corresponding outputs are recorded. The performance of the proposed system is experimented in two sections. In the first section, the agriculture field data are collected using the proposed IoT WSN module, and different optimization algorithms are performed for data prediction. The IoT based Sensor node has been developed to gather sensor data from agriculture land and the IoT sensor node is portrayed in Fig. 3.
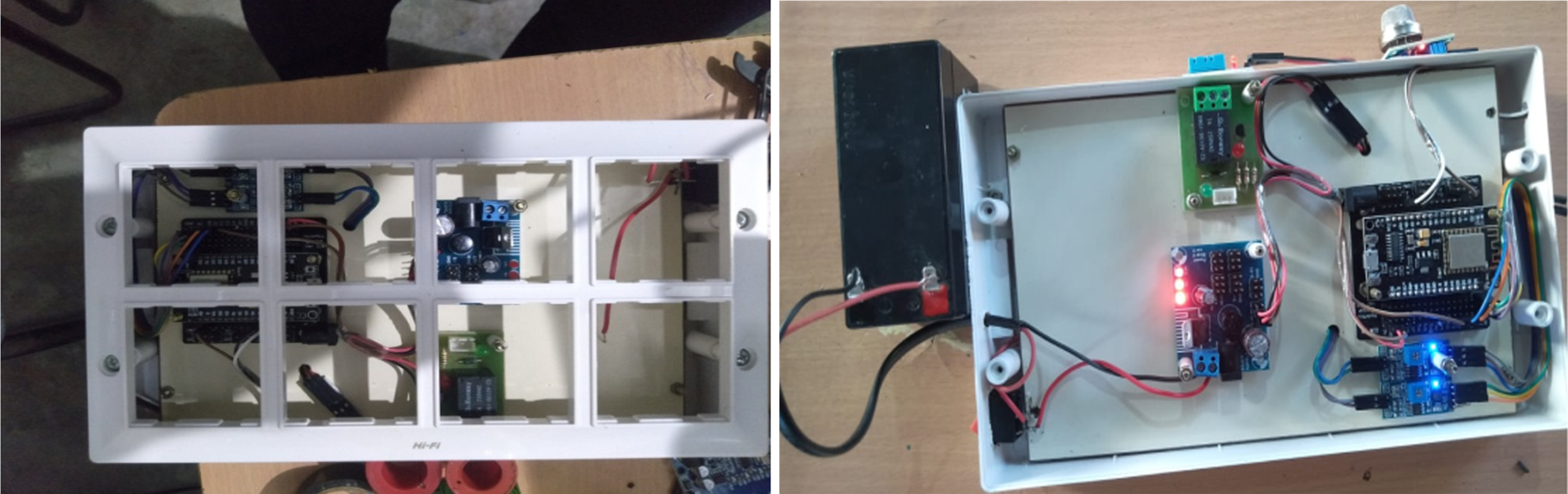
Developed prototype model for agriculture.
The graphical representations of time versus measured data are shown in Figs. 4 and 5. The time interval between the data is 60 minutes. For every one hour, the real data from the agricultural field are collected using the hardware model. Figure 4 shows the analysis of measured soil moisture and temperature data. The data of the humidity and soil temperature are measured in a regular time interval. The soil moisture curve in Fig. 4 shows almost constant throughout the interval. However, while concerning the soil temperature, the curve slowly decreases to 7-time units from 0, and then linearly increases to 10. Also, the time unit interval between 10–15 curves is not linear, due to external temperature variations and after that, it decreases linearly. The difference between time units affects the precision of the output.
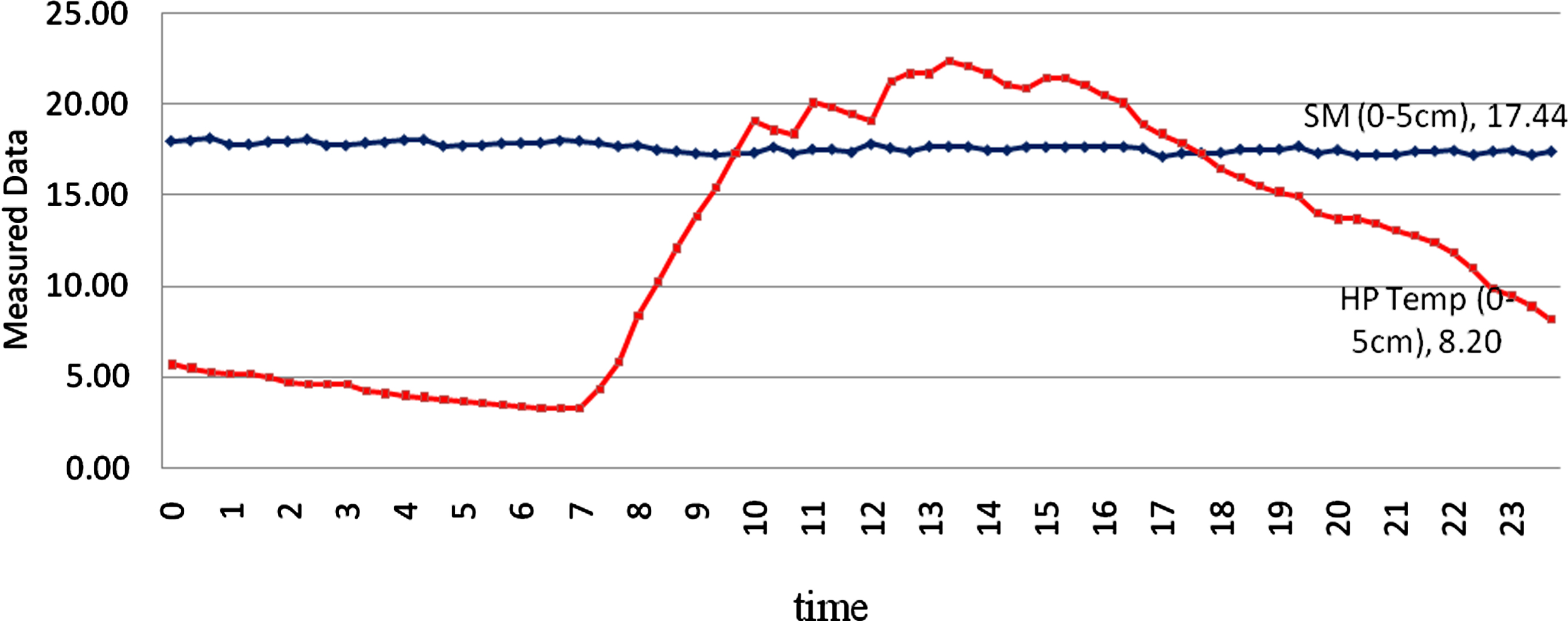
Data belongs to Soil moisture and soil temperature.
The analysis of air temperature and humidity versus time is shown in Fig. 5. The graph of air temperature and humidity is also not linear or constant with time intervals. It affects the farmer’s decision of a later process. The farmer releases/closes the water knob based on this result. The wrong prediction will affect the agricultural productivity. Various optimization algorithms are used to predict the errors in the sensor output to overcome this problem.
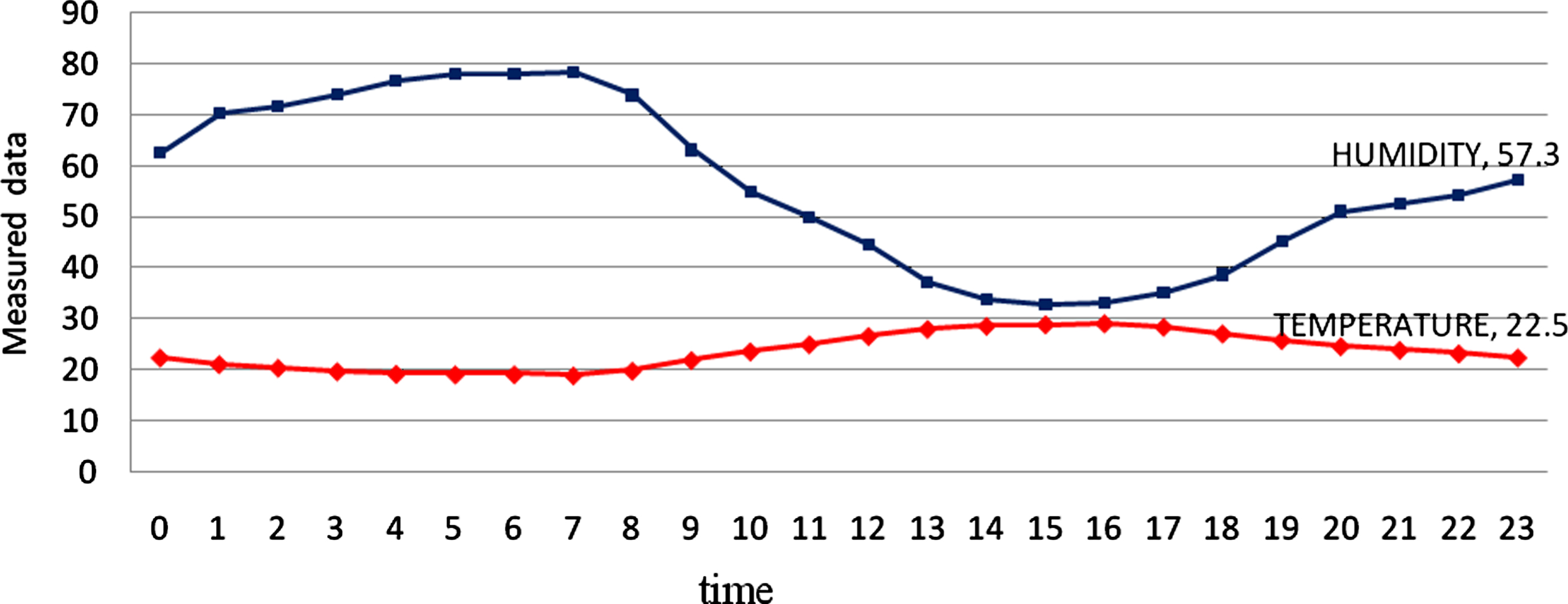
Data belong to Air temperature and humidity.
The simulation environment is MATLAB 2018a and the operating system is Windows7, 4.00GB RAM, Core (TM) i5- Intel(R) processor. In the first step, all the collected data are imported into MATLAB software. The imported data are trained with different optimization algorithms such as LR, RT, SVM, and LWBA. The predicted data corresponding to the respective algorithms are shown in Fig. 6.
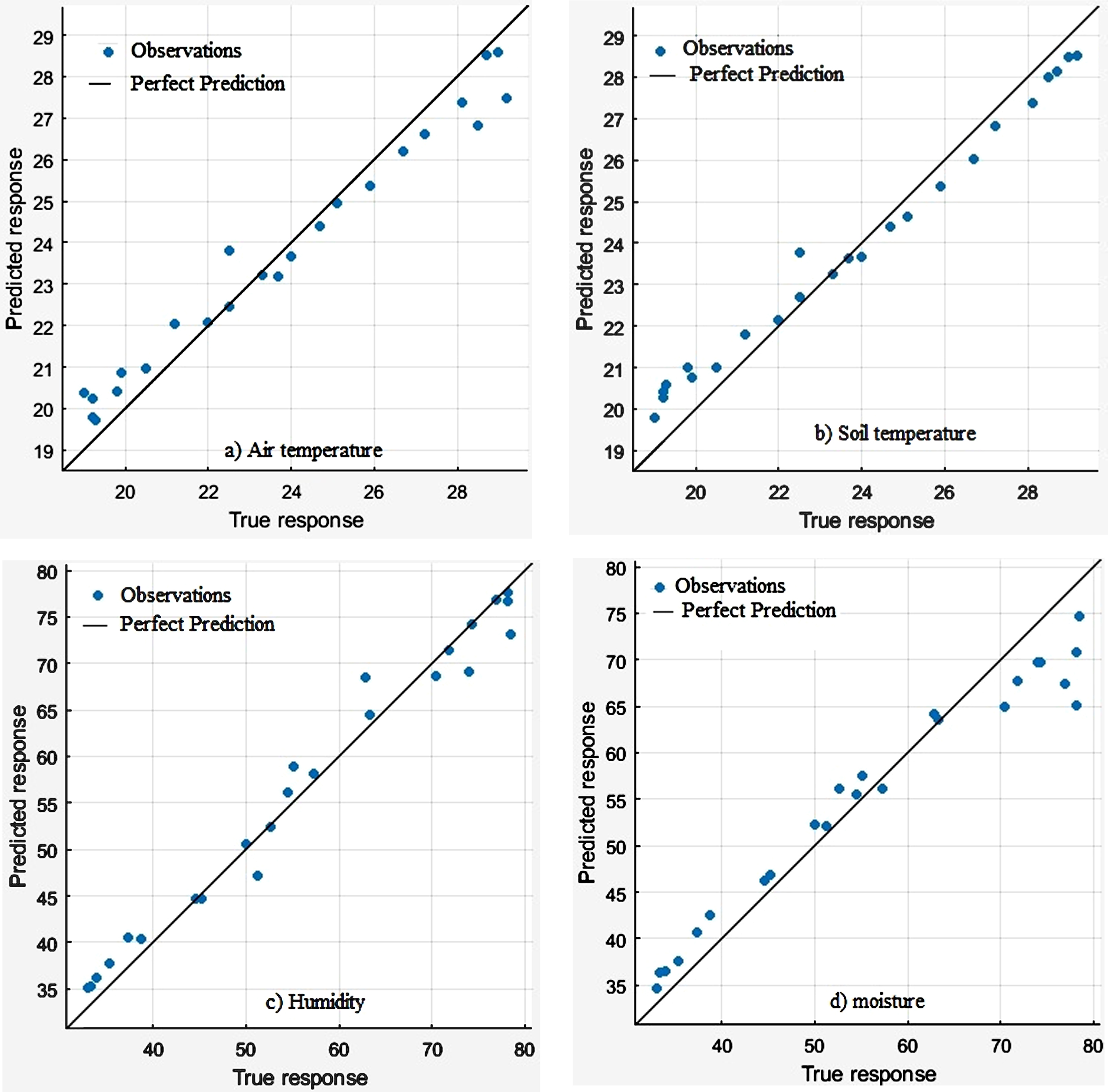
True response Vs Predicted response of the given parameters.
Observation versus perfect prediction analysis of the LWBA algorithm is depicted in Fig. 6. The inter-observation analysis versus a perfect prediction of air and soil temperature run through the LWBA algorithm is shown in Figs. 6a and 6b. This proposed LWBA algorithm optimizes the received data and predicts the results. The combined approach of Bat and Levy Walk algorithm does not fall into the optimal local problem and it effectively predicts the optimized data. Hence, the difference between the observation and the expected data is much smaller compared to other algorithms. The actual and the predicted humidity as well as moisture response analysis are shown in Figs. 6c and 6d. The graphs of the respective parameters demonstrate that the error between the observation and the prediction is much lower than other algorithms.
In addition to validating the proposed LWBA algorithm, various error functions such as MSE, RMSE, R2, and MAE are incorporated. Tables 1–4 illustrate the numerical results of the existing and the proposed LWBA algorithms. The error value between the real data and the predicted data is analyzed using various error functions such as RMSE, MSE, R Squared, and MAE. The RMSE, MSE, and MAE values of LR, SVM, RT, and LWBA are also recorded in Tables 1–4.
Error analysis of air temperature
Error analysis of soil temperature
Error analysis of soil moisture
Error analysis of humidity
Different error functions are used to measure the difference between the actual observation and the predicted data. The results of error models for various optimization algorithms are plotted separately. An LWBA is a hybrid algorithm that will not allow the local optimal problem and it calculates the possible optimal value using BAT and Levy Walk algorithms. Therefore, the error values that belong to the proposed LWBA show less compared to all other algorithms and R2 analysis performs high. Table 1 comprises the numerical values of air temperature and the comparison between the existing error modes and the proposed one. The R2 of the proposed LWBA attains highest value of 87% from 34% of LR. In view of RMSE, LWBA experiences less error about 1.3053 whereas in LR, it is 2.8934.
The first group in Fig. 7 is the RMSE output corresponding to the existing and the proposed LWBA algorithms. Similarly, the third and fourth groups are the results of MSE and MAE of the existing and the proposed LWBA algorithms. Out of which, the LWBA algorithm experiences less errors compared to the other existing algorithms in terms of RMSE (1.3053), MSE (1.7039), and MAE (1.0918). The result corresponding to the R2 model and the LWBA algorithm provides a higher R2 value (0.87) compared to other schemes.
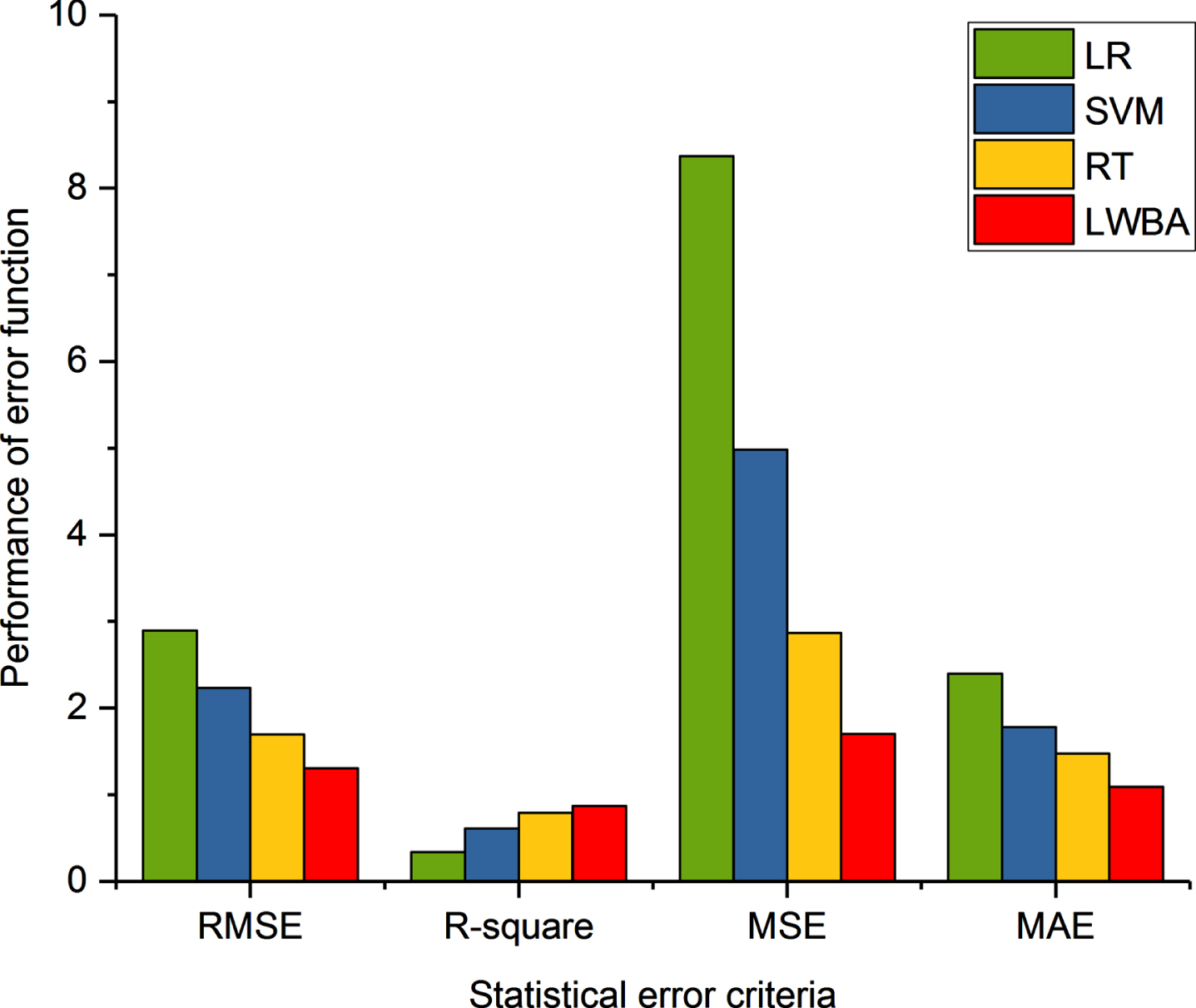
Error analysis of air temperature.
Table 2 shows the numerical outcomes of the soil temperature and the comparison with the existing error modes. The MSE of the proposed LWBA attains very less value of 8.131 from 47.108 of LR. In view of MAE, LWBA experiences less error of1.798 whereas in LR, it is 5.6598.
Figure 8 illustrates the Error analysis of Soil Temperature of the existing and the proposed LWBA algorithms. The LWBA algorithm shows less error compared to the conventional algorithms in terms of RMSE (2,851), MSE (8,131), and MAE (1,798). The result corresponding to the R2 model and the LWBA algorithm provides a higher R2 value (0.89) compared to other schemes.
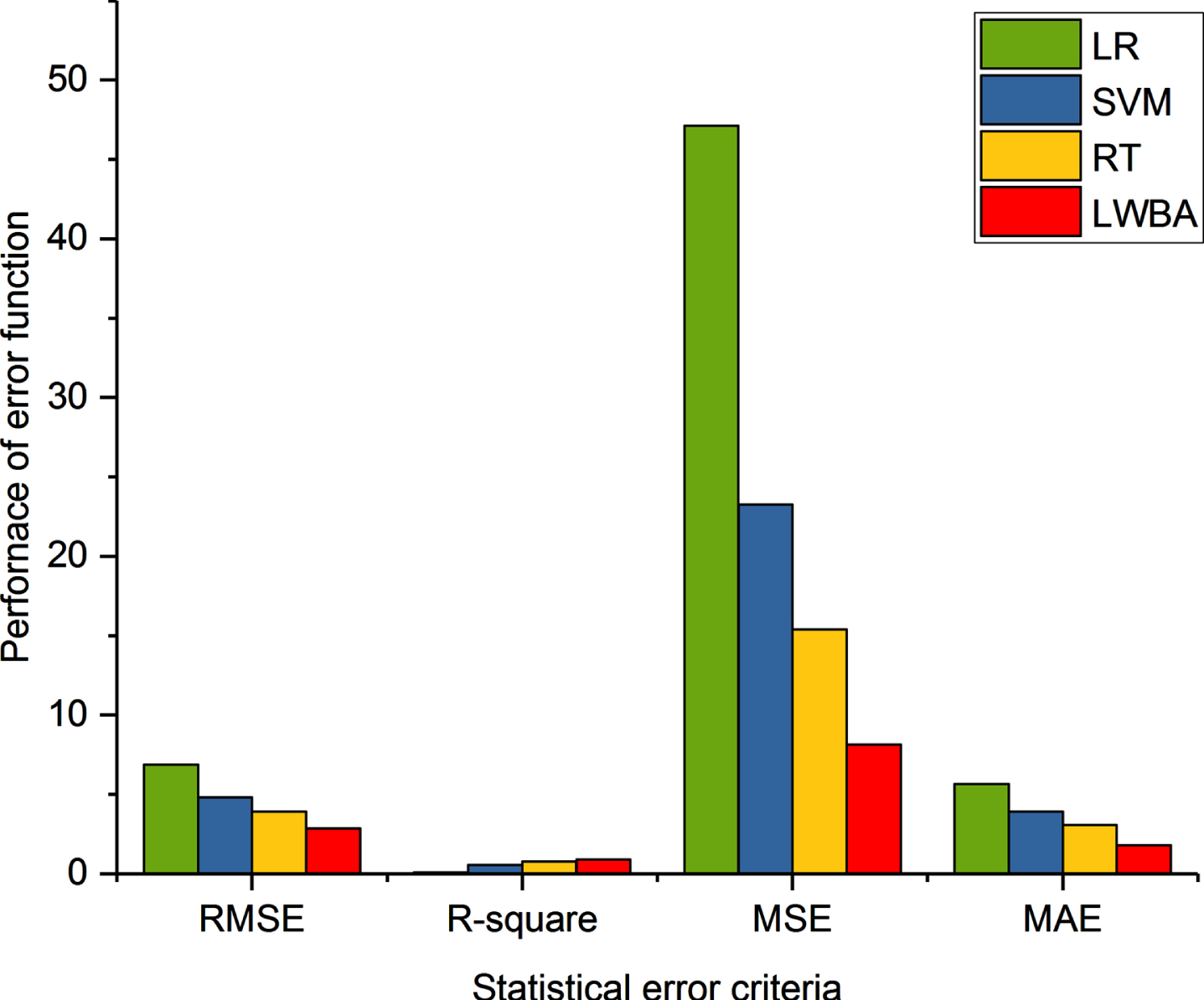
Error analysis of soil temperature.
The outcome of soil moisture belongs to LWBA and the existing algorithms are recorded in Table 3 numerically. The RMSE of the proposed LWBA attains very less value of 3.6031 from 5.7382 of LR. In view of MSE, LWBA experiences less error of 12.981 whereas it is 32.927 in LR.
Figure 9 shows the comparison of various error models of soil moisture. Different error models are calculated for different optimization techniques. The graphical representation indicates that the LWBA algorithm experiences a much smaller error than the three other algorithms, as raw data are observed and predicted using the LWBA algorithm at each step. Various error measures such as RMSE (3.6029), MSE (12.981), and MAE (1.3211) show that the differences in the true and the response are significantly less compared to others. The R2 model result by concerning the LWBA scheme provides a higher value (0.89) compared to other algorithms.
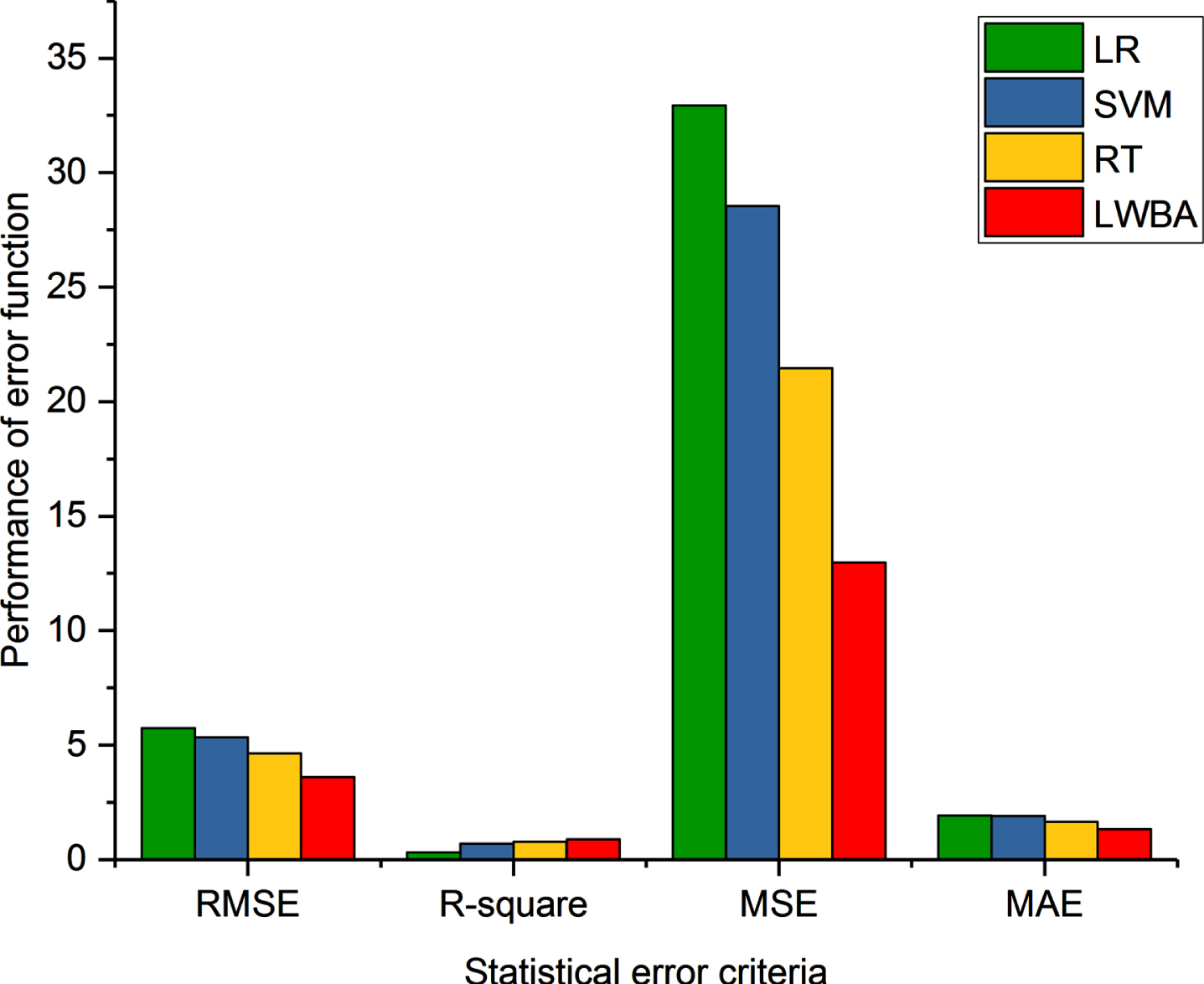
Error analysis of soil moisture.
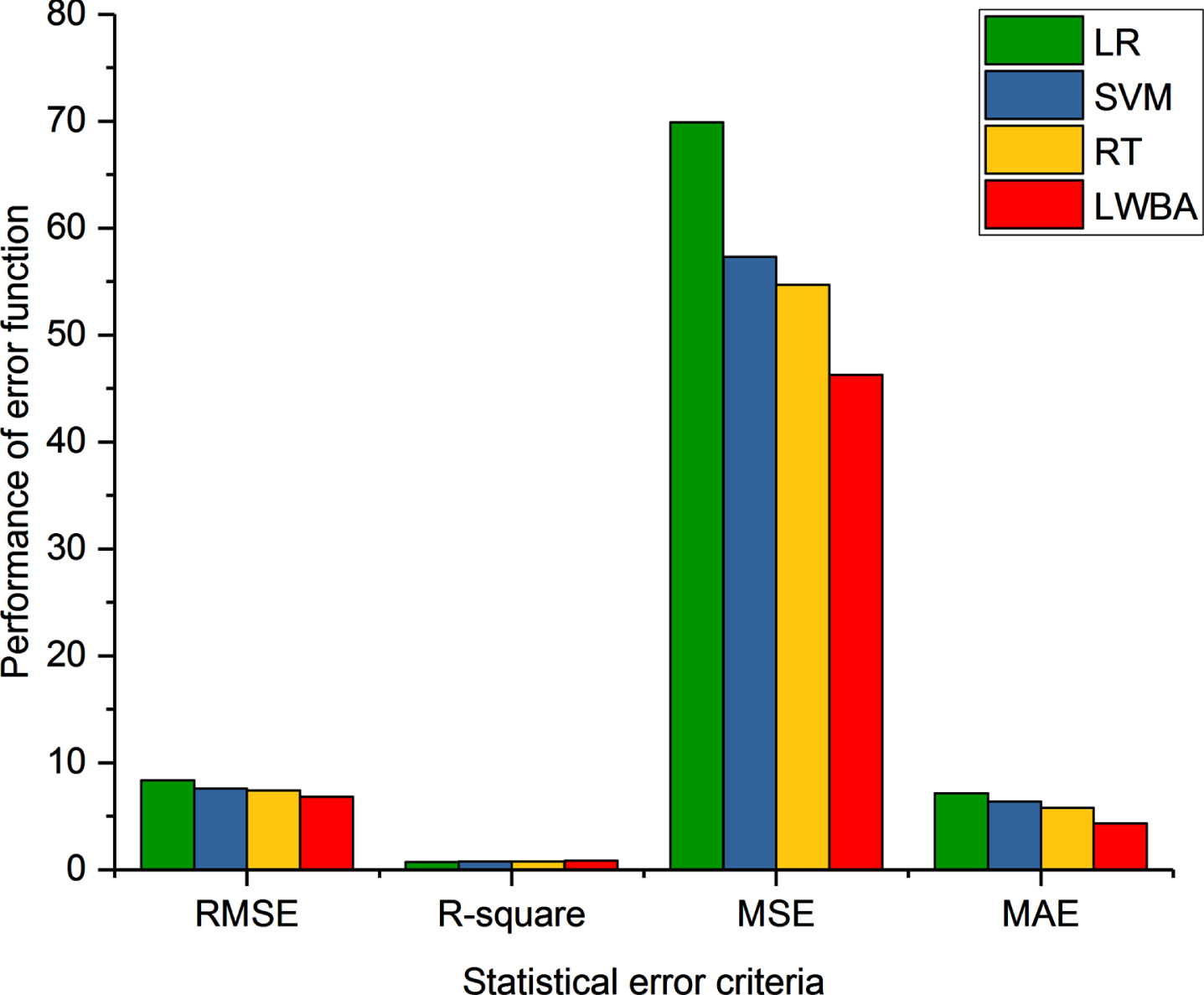
Error analysis of humidity.
The comparative analysis of various humidity error models is clearly explained in Table 4 and Fig. 9. The error functions are validated with different optimization algorithms. The LWBA algorithm shows a big difference compared to other optimization techniques. The combined BAT approach and Levy Walk algorithm provides the lowest error measurements, such as RMSE (6.8022), MSE (46,271), and MAE (4,311) compared to other algorithms. The R2 error model’s output that belongs to the LWBA produces a higher value (0.85) than other schemes.
The statistical analysis of the proposed LWBA algorithm and the collected dataset are tabulated in Tables 5 and 6. It indicates the performance of the proposed algorithm as well as the existing collected dataset in terms of mean, standard deviation and range. The time complexities of all the stated algorithms are examined. The time complexity of the proposed LWBA algorithm is 4.2809 sec, whereas the time complexity of the existing RT is 5.2801 sec, SVM is 6.837 sec and the LR is 5.6302 sec. The LWBA enhances the performance of bat and levy optimization approaches. Hence, it effectively works on the local optima problem, and speeds up the rate of convergence. By summarizing the above results, it is clear that the proposed LWBA algorithm provides optimum parameters regarding the agriculture field and it also enables effective smart irrigation. The farmers can irrigate the land-field according to the prediction output of the LWBA.
Statistical Analysis of Collected Data
Statistical Analysis of LWBA Algorithm
This article has suggested an LWBA optimization algorithm with IoT-based architecture for high-precision large-scale agriculture. This proposed architecture effectively improves the performance parameters in two phases. In the first phase, well-defined TDMA-based slot allocation avoids the collision and it simultaneously prevents retransmission. Periodic ON and OFF schedules provide efficient energy utilization between parallel network nodes and experience optimization issues. A prototype model has been implemented to collect data from the application environment. To optimize the predicted result, an LWBA is built. Various error models are evaluated to analyze the LWBA algorithm’s performance with different optimization algorithms, namely LR, Regression Tree, and SVM. Simulated results show that the LWBA experiences much smaller errors of RMSE (3.6029), MSE (12.981) and MAE (1.3211) and a high R2 (0.89) than the other three algorithms for soil moisture and humidity. The simulated result of this proposed LWBA provides exact landscape information to the farmers with greater accuracy. Further, this work can be extended to develop the user end module with actuator invoking mechanisms.
Conflict of interest
The authors declare that they have no conflict of interest.