Finite-time synchronization is concerned for the fractional-order complex-valued fuzzy cellular neural networks (FOCVFCNNs) with leakage delay and time-varying delays. Without using the usual complex-valued system decomposition method, this paper designs the different forms of the controllers by using 2-norm. And we construct the appropriate Lyapunov functional and apply inequality analytical techniques, some new sufficient conditions are obtained to ensure finite-time synchronization of the FOCVFCNNs. The upper bound of setting-time function is obtained. Finally, numerical examples are examined to illustrate the effectiveness of the analytical results.
Fractional-order calculus is the promotion and extension of integer-order calculus. And it was first proposed by Leibnitz in 1695. With the deepening of research, researchers take fractional-order calculus as an effective tool to study the complex network system of fractional-order. Fractional-order neural network model is closer to the phenomenon of life, and it has gradually become a hot research topic in recent years. The researchers find that many things exhibit fractional dynamics in nature and engineering, such as viscoelastic system [1, 2], seismic analysis [3], and system control [4, 5]. From the perspective of synchronization time, synchronization can be divided into asymptotic synchronization and finite-time (FET) synchronization. In practice, the study of FET synchronization is more important. For example, in confidential communication, if there is a longer time spent on synchronization, there is more possibility that the message will be taken over. Compared with asymptotic synchronization, FET synchronization has better robustness and anti-interference. Based on these advantages, in theoretical research or practical application, FET synchronization of fractional-order networks has achieved fruitful results [6–11]. For example, in [9], finite-time synchronization is considered for a class of fractional-order memristor-based neural networks with time delays. In [10], based on two kinds of different control techniques and fractional Lyapunov functional approach, some sufficient conditions are explored for finite-time synchronization of fractional-order gene regulatory networks with time delays. In [11], Li discusses the finite-time synchronization problem of time-varying delay fractional-order coupled heterogeneous complex networks with external interference via a discontinuous feedback controller.
For fractional-order fuzzy cellular neural networks, there are also some literature about synchronization research [12, 13]. In [12], rather than using the Lyapunov stability method, Zheng mainly studies the finite-time stability and synchronization problems of the memristor-based fractional-order fuzzy cellular neural network according to Gronwall-Bellman inequality. In [13], stability and synchronization problems are studied for the memristor-based fractional-order fuzzy cellular neural networks with multiple delays.
It is worth noting that all of the above are carried out on real-valued neural networks, and the practical application of neural networks is related to complex-valued signals that real-valued neural networks cannot handle, but complex-valued neural networks can solve such problems [14]. In fact, complex-valued variables exist in various applications, including image reconstruction, pattern recognition, associative memory. In the complex-valued neural network (CVNN), its state vector, activation function, and the connection weights are all complex values. Compared with real-valued neural network (RVNN), CVNN can simplify the model structure, reduce training time and improve learning ability [15], thereby solving some problems that RVNN is difficult to solve. The main skill in all previous studies was that the original complex-valued system was decomposed into two real-valued systems [29, 30]. Although this method is effective for fractional-order complex-valued systems, this adds the dimension of the system and makes it harder to calculate. To solve this problem, an idea is proposed, which directly discusses the synchronization of FOCVNNs based on the theory of complex functions [22, 26]. In [22], the author discusses the global synchronization of time-delayed fractional-order complex-valued neural networks (FOCVNNs) by applying complex values theory, and some synchronization conditions are established. And different from the above references, the reference [26] studies finite-time synchronization of FCCSs with the theory of complex functions rather than the separation method.
The dynamic behavior of FOCVNNs has been considered by researchers [16, 17]. For example, the author studies the quasi-projective synchronization of the fractional complex-valued recurrent neural networks [16]. And Zhang studies the finite-time projective synchronization of fractional-order complex-valued memristor-based neural networks with delay [17]. When modeling neural network, parameter uncertainty (or error) is unavoidable. To solve this problem, in 1996, Yang first combines fuzzy logic with neural networks and proposes a new neural network model-fuzzy cell neural network, which is different from the traditional cellular neural network, adding Fuzzy AND and Fuzzy OR based on the cellular neural network [18, 19]. This not only retains the advantages of traditional cellular neural network and the local connectivity between cells, but also makes it have the ability to deal with nonlinear problems. In the actual cell neural network system, the effect of leakage delay cannot be ignored. So far, the synchronization study considering FOCVNNs with leakage delay has also attracted the attention of researchers [20, 21]. In [20], the integral sliding mode control is used to study the global asymptotical synchronization of two nonidentical complex-valued neural networks with leakage delays and time-varying delays. In [21], the author discusses the anti-synchronization control problem of complex-valued neural networks with leakage delay and time-varying delays, and obtained sufficient conditions for CVNNs to anti-synchronization. At present, it is necessary to study the finite-time synchronization problem of fractional-order fuzzy cellular neural networks with leakage delay.
Motivated by the above discussion, this paper mainly considers the finite-time synchronization problem of the FOCVFCNNs. The main contributions of this paper are summarized as follows. The model of FOCVFCNNs contains fuzzy terms, leakage delay and time-varying delays. Compared with the existing literature on complex-valued coupled network systems [22, 24–26], this model is more general and extensive, and more suitable for practical problems. Different from most existing literature [27–30], they mainly decompose the complex-valued coupling network system into two real-valued systems, and then deal with the two systems respectively. In this paper, the FOCVFVNNs is not decomposed, but we take it as a whole to study its finite-time synchronization problem. The appropriate controllers are designed by using 2-norm, the sufficient conditions are obtained by constructing the Lyapunov functional and inequality techniques.
The rest of this paper is organized as follows. First of all, we introduce the definition of the Caputo fractional calculus, the FOCVFCNNs model, the definition of finite-time synchronization, and some lemmas in Section 2. Secondly, in Section 3, we deduce the sufficient conditions for finite-time synchronization of FOCVFVNNs. In Section 4, the numerical example shows the effectiveness of the proposed method. At last, we conclude this paper in Section 5.
Notation: Throughout this paper, let be the complex numbers set, and denote n-dimensional complex vectors and n × m complex matrices. denotes the conjugate complex value of x, xT denotes the transport of x, and represents the norm of x. The imaginary unit is denoted by .
System description and preliminaries
In this section, in order to describe the FOCVFCNNs, the Caputo fractional derivative is adopted to address the problem statement.
Definition 1 [23]. Let , and n is a positive integer. The left-sided Caputo fractional-order derivative of order β for f (t) is defined as
where t ≥ t0 and is a positive integer such that n - 1 < β < n, is the Gamma function. Especially, when 0 < β < 1, we have
In this section, we give the mathematical model of the FOCVFCNNs. The delayed FOCVFCNNs with time-varying delay is given as
where t0 ≥ 0 denotes the starting time, where 0 < q < 1, is the state variable of ith neuron in the drive system (1), N is the number of neurons. ci is the self-inhibitions, Ii represents the external input and bias of the ith neuron, αij, βij, Tij and Sij are the elements of the fuzzy feedback MIN template, fuzzy feedback MAX template, fuzzy feed-forward MIN template, fuzzy feed-forward MAX template, respectively, ⋁ and ⋀ denote the fuzzy OR and fuzzy AND, aij is the elements of feedback templates, bij is the elements of feed-forward template, Vj (t) is the input of the jth neuron. f (·) is the complex valued neuron activation functions, is leakage term delay, τij (t) is the time-varying delay, where τ = max {τ1, τ2}, , , represents a continuous function set from the interval [- τ, 0] to .
The response system is
where , ui (t) is a controller of ith neuron in the response system (2). Our purpose is to synchronize system (1) to system (2) in a finite time via an appropriate controller. The synchronization error vector is defined by ei (t) = yi (t) - xi (t), i = 1, 2, . . . , N … , n .
Based on the (1) and (2), the synchronization error system is
where ,
Definition 2. Define that the drive system (1) is synchronized to the response system (2) via a designed controller, if there exists a constant t0 > 0 satisfying
∀t > t0, i = 1, 2, . . . , N, where t0 is the named the setting time.
We need the following assumptions to study the finite-time synchronization of the system (1).
Assumption 1. Let αij, , be continuous functions, i, j = 1, 2, . . . , N, then
Assumption 2. There exist a complex value , such that
The following lemmas of the fractional calculus are necessary in proof of our main results.
Lemma 1 [24]. Let be a differentiable complex-valued vector. Then, for all t ≥ t0 and 0 < q < 1, there exists the inequality: The title page should provide the following information:
where P is a constant positive-definite Hermitian matrix.
Lemma 2 [25]. For any and constant ξ > 0, the following inequality holds:
Lemma 3 [22]. Assume that there exists a continuous function leading to that the following conditions tenable:(1) V (t) is positive definite. (2) There exist real numbers μ > 0, such that
then V (t) fulfils that
and V (t) ≡0, for t ≥ T (t0). In addition, T0 is the settling-time function,
and T (t0) is continuous.
Main results
It is well known that time delays are unavoidable for complex network modeling. Therefore, it is very important to consider the dynamics for the complex networks with time delays, and finite-time synchronization analysis is obviously one of the most important problems. In order to achieve the finite-time synchronization defined in Definition 2, the controllers should be designed and cooperated with the nodes of the system (1). The following controllers of the paper are considered for:
i = 1, 2, . . . , N, where .
Theorem 1.Let Assumptions 1 and 2 be satisfied. If
hold, where i, j = 1, 2, . . . , N, then the drive system (1) and the response system (2) are finite-time synchronized under the controller (9). Furthermore, the setting time T is estimated as , where 0 < q < 1, .
Proof. Consider a Lyapunov functional
then, based on lemma 1, one has
For simplicity, denoting
using Lemma 2, we obtain
using Lemma 2 and Assumption 1, we have
then, using Lemma 2 and Assumptions 1-2, we have
and
and
Substitute (9) into (18), we get
On the basis of the above work (12)-(18), we can drive that
According to Theorem 1, we have
where represents the real part of ℓi. Denoting . We get , by Lemma 3, we have
and V (t) ≡0, for t ≥ T (t0) . And the upper bound of settling time function is
Based on the above discussions, we can conclude that and ei (t) ≡0 when t ≥ T (t0) . This shows that the error system has achieved synchronization in finite-time.
Remark 1. In Refs [27, 28], by dividing the CVNNs into two RVNNs and analyzing the two RVNNs, sufficient conditions were established to ensure the synchronization of CVNNs. Obviously, it is quite inconvenient and complex to verify in applications. Unlike [27, 28], the synchronization analysis is studied by applying complex values theory, and some simple criteria are obtained. Evidently, the method in this paper is more effective and simpler.
Consider the following controller
i = 1, 2, . . . , N, where
Theorem 2.Let Assumptions 1 and 2 be satisfied. If
hold, then the finite-time synchronization of system (1) and system (2) under the controller ui (t) (24) could be achieved in FET T (t0), and the settling time
where 0 < q < 1, .
Proof. Consider a Lyapunov functional
then, based on lemma 1 and Assumptions 1-2, one has
according to Theorem 2, we have
where represents the real part of ℓi. Denoting . We get
by Lemma 3, we have
And V (t) ≡0, fort ≥ T (t0), the upper bound of settling time function is
based on above discussions, the error system achieves synchronization in FET.
Remark 2. In this paper, two kinds of controllers are designed. The controller (24) is simple to implement in theory, but it is difficult to apply to the actual engineering. When the activation function is bounded, and the first controller (9) is better to implement in practice than the second controller.
If in system (1), then the following controller is proposed
i=1,2,...,N, We can obtain the following corollary.
Corollary 1.Assume that the above Assumptions 1-2 is tenable. If
hold, where i, j = 1, 2, . . . , N, then the finite-time synchronization of system (1), system (2) () under the controller (33) could be achieved in FET T (t0), and the settling time , where 0 < q < 1, .
Proof. Consider a Lyapunov functional
then, based on lemmas 1-2 and Assumptions 1-2, one has
According to Theorem 3, we have
where represents the real part of ℓi. Denoting . We get
by Lemma 3, we have
and V (t) ≡0, for t ≥ T (t0), the upper bound of settling time function is
Numerical examples
In this section, the example is provided to demonstrate the effectiveness of the proposed approach.
Example 1. We give the time-varying delayed drive system and the response system respectively as follows
With the controller to be designed as follows:
with , τij (t) =3 (1 - cos (ijt)), τ = 6, where q = 0.98, , f (x (t)) = (f1 (x1 (t)) , f2 (x2 (t))) T,, where , Im represents the real part and imaginary part respectively.
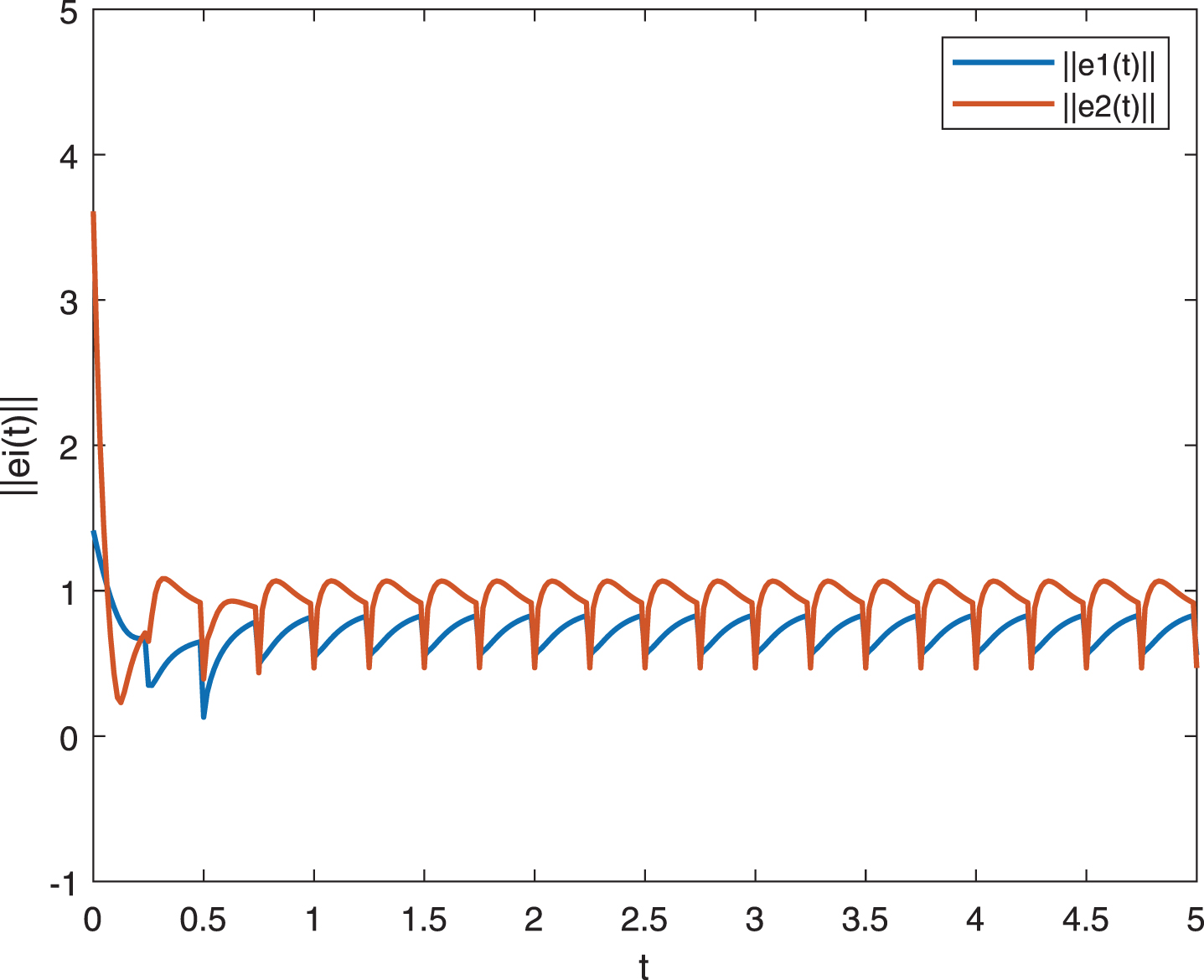
Time response of the error variables e1(t) and e2(t) without the controller (42)
The initial conditions are selected as
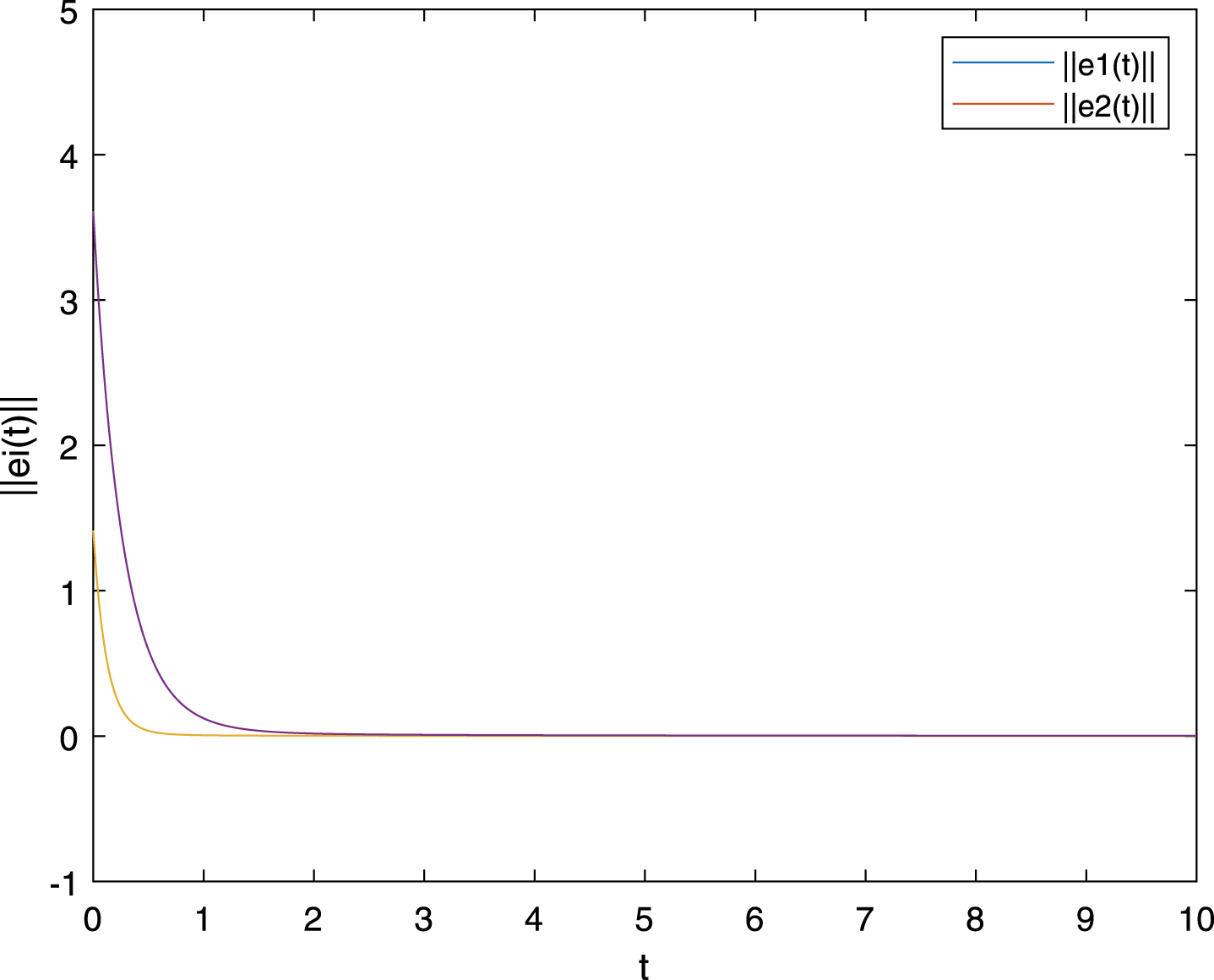
If there is no control function, the total synchronization error e1 (t) is shown in Figure.1, which shows that the drive system (40) cannot synchronize the response system (41). By simple computation, we have c1 = 1 + i, c2 = 0.5 - i, k1 = 2 + i, k2 = 1 -2i, ℓ1 = 1.7 + i, ℓ2 = 2 - i, ζ1 = 1 + i, ζ2 = 2 -2i, η1 = 15 + i, η2 = 16 - 2i, λ1 = 1 + i, λ1 = 2 - i, the condition of Theorem 1 is satisfied, and the settling time is T (t0) =2.164. The total synchronization error ∥e (t) ∥ 2 is shown in Figure.2, which indicate the drive system (40) can synchronize the response system (41) within T (t0) =2.164 when the control is added to the network.
Time response of the error variables e1(t) and e2(t) with the controller (42) for Example 1
Example 2. The drive system and the response system are also the same as in example 1. With the controller to be designed as follows:
We take the same initial conditions as in example 1.
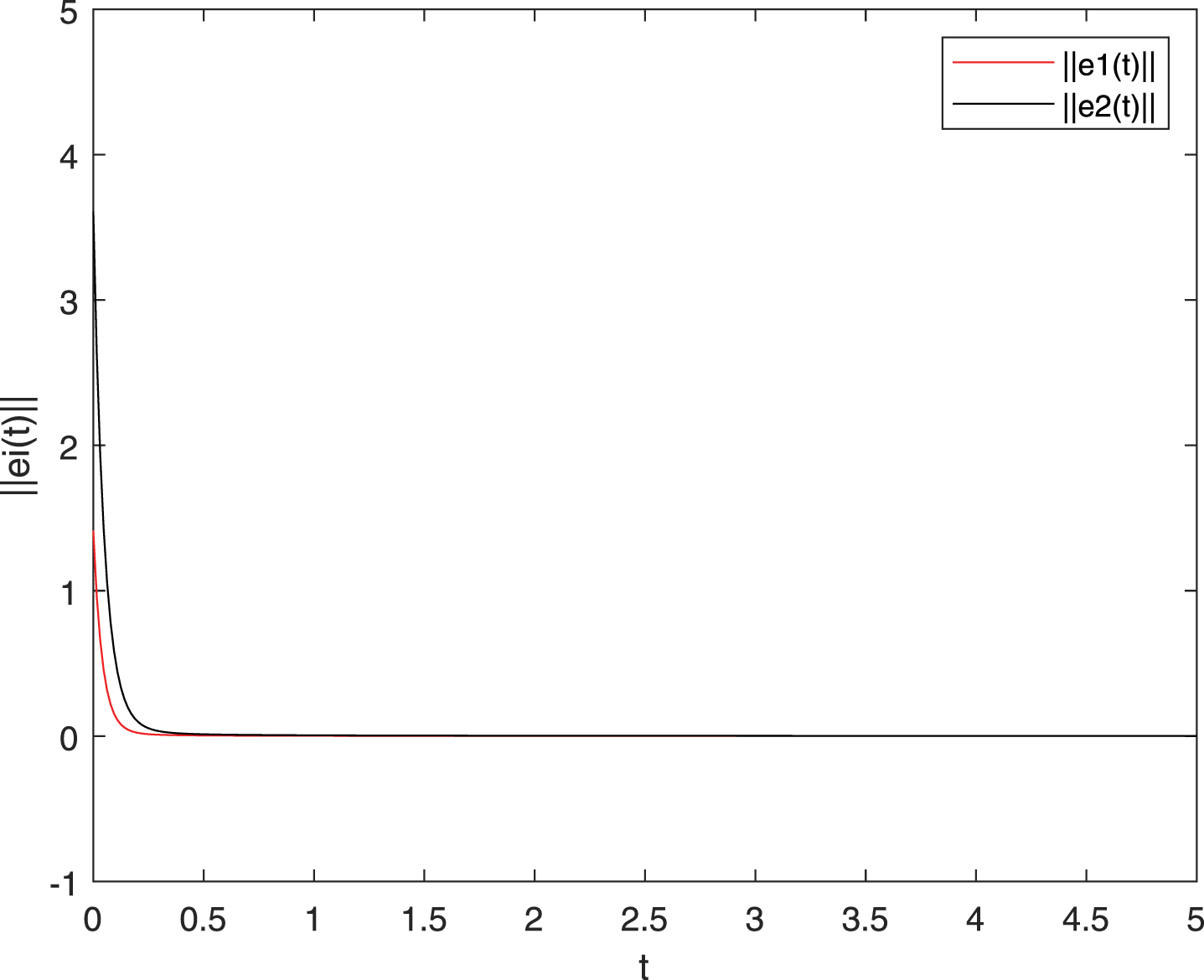
And other parameters are the same as in example 1. By simple computation, we have c1 = 1 + i, c2 = 0.5 - i, k1 = 2 + i, k2 = 1 -2i, ℓ1 = 7.2 + i, ℓ2 = 8 - i, ζ1 = 1 + i, ζ2 = 2 -2i, the condition of Theorem 2 is satisfied, and the settling time is T (t0) =0.51. The total synchronization error ∥e (t) ∥ 2 is shown in Figure.3, which indicate the drive system can synchronize the response system within T (t0) =0.51 when the control is added to the network.
Time response of the error variables e1(t) and e2(t) with the controller (43) for Example 2
Conclusions
In this paper, we have dealt with the finite-time synchronization problem of fractional-order complex-valued fuzzy cellular neural networks with time-varying delays. Sufficient conditions have been established in terms of inequalities that guarantee the finite-time synchronization of the addressed neural networks with delayed. Without using the finite-time stability theorem, the conditions for synchronization of such systems are obtained. Two numerical examples have been presented to illustrate the usefulness and effectiveness of the main results obtained. The future work will focus on the investigation of the stability and fixed-time synchronization of fractional-order fuzzy cellular neural networks with impulse disturbance or parameters uncertainties.
Footnotes
Acknowledgments
The work was supported by the Education Commission Scientific Research Innovation Key Project of Shanghai under Grant 13ZZ050, the Science and Technology Commission Innovation Plan Basic Research Key Project of Shanghai under Grant 12JC1400400, and the Chinese Universities Scientific Fund under Grant CUSF-DH-D- 2013063.
Authors’ contributions: Wenbin Jin calculated and drew the figures of the example and wrote the paper, Wenxia Cui theorized the paper, and Zhenjie Wang polished the English writing of the paper.
Conflict of interest Section: The authors have declared that no conflict of interest exists.
References
1.
KoellerC.R., Applications of Fractional Calculus to the Theory of Viscoelasticity, Transactions of the Asme Journal of Applied Mechanics51 (1984), 299–307.
2.
TĺekamG.O., KwuimyC.K. and WoafoP., Analysis of tristable energy harvesting system having fractional order viscoelastic material, Chaos25 (2015), 191–206.
3.
El-MisieryA. and AhmedE., On a fractional model for earthquake, Applied Mathematics and Computation (2006), 207–211.
4.
LiC. and ChenG., Chaos in the fractional order Chen system and its control, Chaos Solitons & Fractals22 (2004), 549–554.
5.
Munoz-VazquezA.J., Sanchez-TorresJ.D. and DefoortM., Second-order predefined-time sliding-mode control of fractional-order systems, Asian Journal of Control (2020).
6.
DingD.W., YouZ.R., HuY.B., YangZ.L. and DingL.H., Finitetime synchronization for fractional-order memristor-based neural networks with discontinuous activations and multiple delays, Modern Physics Letters B34 (2020), 26.
7.
LzaB. and YyB., Finite time impulsive synchronization of fractional order memristive BAM neural networks, Neurocomputing384 (2020), 213–224.
8.
PratapA., RajaR., CaoJ.D., AlzabutJ. and HuangC.X., Finitetime synchronization criterion of graph theory perspective fractional-order coupled discontinuous neural networks, Advances in Difference Equations2020 (2020), 24.
9.
VelmuruganG. and RakkiyappanR., Finite-time synchronization of fractional-order memristor-based neural networks with time delays, Neural Networks73 (2015), 36–46.
10.
YqA., HyA., LdbcD. and JmE., Finite-time synchronization of fractional-order gene regulatory networks with time delay, Neural Networks126 (2020), 1–10.
11.
LiY., KaoY.G., WangC.H. and XiaH.W., Finite-time synchronization of delayed fractional-order heterogeneous complex networks, Neurocomputing384 (2020), 368–375.
12.
ZhengM., et al., Finite-time stability and synchronization of memristor-based fractional-order fuzzy cellular neural networks, Communications in Nonlinear Science and Numerical Simulation59 (2018), 272–291.
13.
YaoX., LiuX. and ZhongS., Exponential stability and synchronization of Memristor-based fractionalorder fuzzy cellular neural networks with multiple delays, Neurocomputing419 (2021), 239–250.
14.
ShiY., CaoJ. and ChenG., Exponential stability of complexvalued memristor-based neural networks with time-varying delays, Applied Mathematics and Computation313 (2017), 222–234.
15.
JankowskiS. and LozowskiA., Complex-valued multistate neural associative memory, IEEE Transactions on Neural Networks7 (1996), 1491–1496.
16.
YangS., YuJ., HuC. and JiangH.J., Quasi-projective synchronization of fractional-order complex-valued recurrent neural networks, Neural Networks104 (2018), 104–113.
17.
ZhangY. and DengS., Finite-time projective synchronization of fractional-order complex-valued memristor-based neural networks with delay, Chaos Solitons & Fractals128 (2019), 176–190.
18.
YangT. and YangL.B., Fuzzy Cellular Neural Network: a new paradigm for image processing, International Journal of Circuit Theory & Applications25 (1997), 469–481.
19.
YangT. and YangL.B., The global stability of fuzzy cellular neural network, Circuits & Systems I Fundamental Theory & Applications IEEE Transactions on43 (1996), 880–883.
20.
WangL., SongQ., ZhaoZ., LiuY. and AlsaadiF.E., Synchronization of two nonidentical complex-valued neural networks with leakage delay and time-varying delays, Neurocomputing356 (2019), 52–59.
21.
WeiX.F., ZhangZ.Y., LiuM.J., WangZ. and ChenJ., Anti-synchronization for complex-valued neural networks with leakage delay and time-varying delays, Neurocomputing412 (2020), 312–319.
22.
ZhangW., ZhangH., CaoJ., ZhangH. and ChenD., Synchronization of delayed fractional-order complexvalued neural networks with leakage delay, Physica A: Statistical Mechanics and its Applications556 (2020), 7.
23.
KilbasA., SrivastavaH.M. and TrujilloJ.J., Theory and Applications of Fractional Differential Equations, North-Holland Mathematics Studies204 (2006).
24.
XuQ., ZhuangS., LiuS. and XiaoJ., Decentralized adaptive coupling synchronization of fractional-order complex-variable dynamical networks, Neurocomputing186 (2016), 119–126.
25.
FangT. and SunJ., Stability of complex-valued impulsive and switching system and application to the Lĺź system, Nonlinear Analysis Hybrid Systems14 (2014), 38–46.
26.
XuY. and LiW.X., Finite-time synchronization of fractional-order complex-valued coupled systems, Physica a-Statistical Mechanics and Its Applications549 (2020), 11.
27.
Ba OH., ParkJ.H. and CaoJ., Synchronization of fractional-order complex-valued neural networks with time delay, Neural Networks: the Official Journal of the International Neural Network Society (2016), 16–28.
28.
ZhangW., CaoJ., ChenD. and AlsaadiF.E., Synchronization in Fractional-Order Complex-Valued Delayed Neural Networks, Entropy20 (2018), 16.
29.
LeiZ., SongQ. and ZhaoZ., Stability analysis of fractional-order complex-valued neural networks with both leakage and discrete delays, Applied Mathematics & Computation298 (2017), 296–309.
30.
WangL., SongQ., LiuY., ZhaoZ. and AlsaadiF.E., Finite-time stability analysis of fractional-order complex-valued memristorbased neural networks with both leakage and time-varying delays, Neurocomputing245 (2017), 86–101.