
Abstract
In this paper, a variable impedance control method is proposed for uncertain robotic systems based on a nonlinear force contact-based flexible environmental model. First, a nonlinear force contact model between the rigid manipulator and flexible environment is applied to the compliant control of the manipulator, which can avoid excessive force overshoot that usually exists in the traditional spring-damping environmental model. Then, to achieve better force/position tracking performances, a fuzzy-based adaptive variable impedance controller is designed based on the force contact-based flexible environmental model, where the impedance parameters are adjusted online through the force and position feedback of the robotic system, and the fuzzy logic system is used to compensate the uncertainties. Moreover, the stability of the adaptive variable impedance control scheme is proved by the Routh stability criterion, and the boundness of all the signals in the closed-loop control system is guaranteed by the Lyapunov stability theorem. Finally, the effectiveness of the proposed method is verified by the simulation of a two-link manipulator, and the results demonstrate that the performances of position tracking are improved, while the force overshoot and oscillation time are reduced.
Keywords
Introduction
Industrial robots have been widely applied to assembling, testing, polishing, welding, and other operations, which require direct interaction between the manipulator and the environment [1]. The control of the interaction force of the manipulator is crucial in performing tasks [2–4]. The application scenarios of robots are not limited to rigid environment, such as picking robots, cleaning robots, folding robots, etc. However, the existing force control methods mainly focused on the interaction between the manipulator and the rigid environment. Due to the rapid development of the industrial level and the increasing demand for intelligence, the interaction force control between the robots and the flexible environments is still a challenging research direction. Therefore, the compliance of the manipulator is strongly required to ensure the safety and stability of the robotic system [5–7].
In practical applications, most objects in contact with manipulators are nonrigid [8]. It is worth noting that there are many modeling methods involving contact force with a flexible environment, where the contact force is usually modeled as a linear structure, such as a spring model or spring-damping mechanical system. Since many materials have nonlinear stiffness, the traditional linear structure has the limitations of only describing the linear contact force of objects and insufficient physical accuracy. A non-rigid environment usually has nonlinear characteristics, and the nonlinear model of the contact surface should be considered [9]. Luo et al. [10] derived the nonlinear force model of a deformed object based on the Duffing equation, and proposed a unique method to simulate the force and deformation between rigid and elastic objects in complex contact. Omar et al. [11] used a tapered spring method to simulate any linear and nonlinear behavior of soft tissue. Felix-Rendon et al. [12] realized a non-rigid body deformation control scheme by using finite element methods to simulate deformation dynamics. Selecting a sufficiently simple and powerful flexible environment model is a prerequisite for solving the compliant control problem in flexible environments, which is still a topic worthy of in-depth research.
At present, there are two mainstream compliance control methods: the impedance control [13] and the hybrid position/force control [14]. The impedance control takes motion and force into consideration, which selects different impedance parameters to adjust the relationship between the contact force and position [15] and has been widely used in contact force tracking [16–19]. Albu-Schaffer et al. [20] improved the compliance of impedance controller in Cartesian space by local stiffness control. By adding integral terms to the traditional impedance model, Chen et al. [21] eliminated tracking errors and improved the performance of the impedance controller. However, due to friction, external disturbances, unknown joint velocities, and other uncertainties, traditional impedance control is hard to achieve satisfied control performances in the actual operation [22]. Since fuzzy logic and neural networks can deal with uncertain systems and adapt to the human decision-making process [23, 24], the intelligent-based control methods that combine fuzzy logic or neural networks with traditional impedance control have been widely investigated [25–30]. He et al. [31] designed a neural network-based adaptive impedance controller, which not only considered the system uncertainties but also solved the input saturation. Subsequently, He et al. [32] proposed an adaptive fuzzy neural network learning algorithm and an impedance learning strategy to improve the interaction between the manipulator and the environment. In addition, Sun et al. [33] proposed a composite learning impedance controller for robots with parameter uncertainties. To realize contact force tracking of manipulators in the flexible environment, the above compliance control method has also been applied in the flexible environment. Baptista et al. [34] studied the application of a neural network impedance control scheme combining trajectory a prediction algorithm with force error compensation. To enhance the robustness of the manipulator when interacting in a flexible environment, Jafari et al. [35] and Wu et al. [36] introduced adaptive hybrid control methods. The above methods can achieve good performances for flexible environment models. However, when the environments are uncertain or complicated, an adaptive controller is usually required to meet the force control performances.
Considering the shortcomings of traditional impedance control to the uncertainty of environmental stiffness, the variable impedance control schemes have been studied [37–41]. Jung et al. [37] proposed a variable impedance control strategy, which minimized force error through the adaptive method. Variable impedance control can compensate for the poor adaptability of constant impedance control. However, the standard stability analysis is not appropriate for variable impedance control. It is crucial to ensure the stable execution of the task. To prove the stability of the system, Kronander et al. [42] proposed a state-independent stability constraint that related stiffness and its time derivative to damping. Duan et al. [43] first proposed a control method based on tracking error to adjust impedance parameters online, which could compensate for environmental uncertainties. Roveda et al. [44] proposed a sensorless model-based force control method, which improved the performance of force tracking by adjusting stiffness and damping parameters. Compared with traditional control methods, adaptive variable impedance control methods have strong adaptability to unknown environments, therefore, the force control of robots in flexible environments is significance.
In this paper, a nonlinear force contact environment model is applied to avoid the limitations of the traditional linear spring model on force tracking, such as excessive force overshoot and long oscillation time. And a fuzzy adaptive variable impedance controller is then designed to achieve satisfied contact force tracking performance based on the nonlinear force contact model. The main contributions are summarized as follows:
(1) Compared with the traditional spring model [37, 43], the nonlinear force contact model between rigid and elastic bodies is derived from the Duffing equation, which can reflect the nonlinear characteristics of flexible objects and significantly reduce the overshoot of contact force in the initial contact stage. Based on the proposed force contact environmental model, the position-based adaptive variable impedance trajectory generator (PBAVITG) is designed to obtain the reference trajectory. The stability of PBAVITG is proved by the Routh stability criterion, and the steady-state error of force tracking is also proved to be zero.
(2) Different from the existing variable impedance control methods [43, 44], we consider the existence of space conversion of the manipulator, as well as the uncertainties and disturbance in the practical robotic system. Based on the environmental model, a fuzzy-based adaptive variable impedance control (FBAVIC) scheme is proposed to track the reference trajectory and interaction force, where the impedance parameters are adjusted online by force feedback error, and the fuzzy logic system (FLS) is used to compensate for the uncertainties. All the signals in the closed-loop control system are ensured to be bounded by the Lyapunov stability theorem.
This paper is organized as follows, in Section 2, the description of FLS, the force contact model of the flexible environment and the dynamic model of the robotic manipulator are introduced. In Section 3, the derivation and stability analysis of the fuzzy adaptive variable impedance controller are given. The simulation tests are conduct in Section 4 to demonstrate the performances of the proposed method, and the conclusions are drawn in Section 5.
Problem statement and preliminaries
In this paper,
Description of fuzzy logic system
In general, fuzzy logic system (FLS) can approximate any real continuous function over a compact set to arbitrary accuracy. According to the rules of fuzzy control, the fuzzy inference engine performs fuzzy reasoning on the fuzzy input x = (x1, x2, . . . , x
m
) T to solve the fuzzy relational equation and get the fuzzy output
R
j
: If x1 is
where l
i
= 1, 2, . . . , q
i
(i = 1, 2, . . . , m), q
i
is the number of fuzzy set of the ith input x
i
,
The fuzzy system basis function vector ξ (x) = (ξ1 (x) , ξ2 (x) , . . . , ξ p (x)) T can be introduced, Equation (1) can be rewritten as,
In this paper, we use FLS to approximate the uncertain nonlinear function, yields,
Generally, flexible objects are made of isotropic elastic materials that are hard to be described by using the traditional spring-damper model. The Duffing equation is one of the standard models for nonlinear systems under external forces, which essentially defines a nonlinear spring damp-restorer model [10]. Figure 1 shows a single-point contact with normal compression, and x e indicates the original point of contact, which means the position before deformation, and x indicates the maximum deformation point. The normal contact force between the rigid manipulator and flexible environment is defined as follows,
It should be noted that the model of nonlinear contact force was presented in [10]. However, no work has been reported to apply the model to the interaction compliance control for robots with flexible environment. Since this model has a nonlinear characteristic and is closer to the real interaction behavior than the traditional spring model, the control process may be unstable, and the traditional compliance control methods may thus not show a good tracking performance. Therefore, it is necessary to design an improved control method for the nonlinear force contact model.
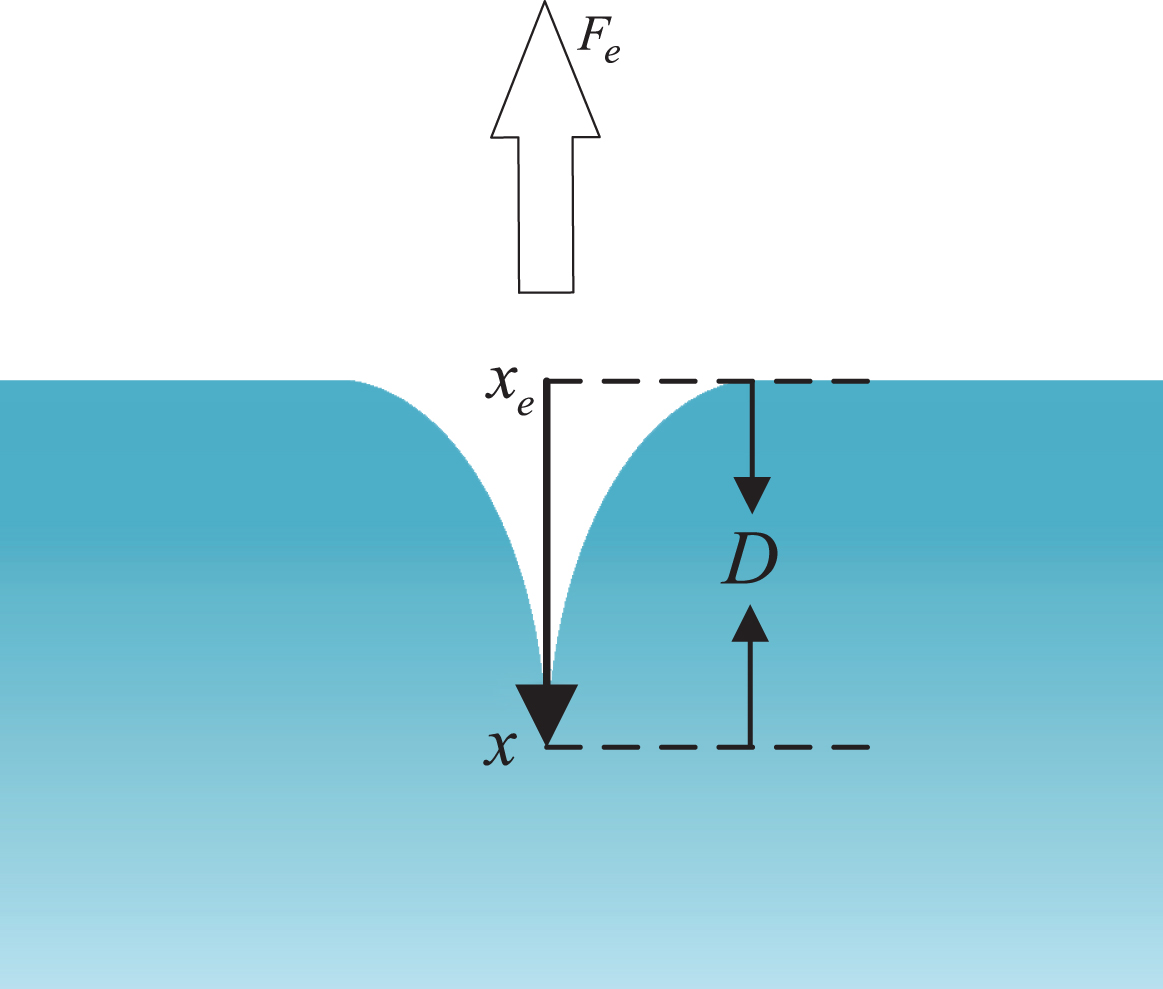
Model of vertical contact force with flexible environment.
The dynamic equation of n-link rigid robot obtained from the Lagrange equation is expressed as follows,
Considering the measurement errors, environment, and payload factors, it is difficult to obtain the accurate physical parameters of the manipulator and the dynamic parameter matrices M (q),
The following properties and assumptions are required for the subsequent development.
The position and velocity vectors of the robot end-effector in the Cartesian coordinate system are denoted by
The dynamic equation Equation (6) is converted to Cartesian coordinate system and expressed as,
The objective of this paper is to design a trajectory generator and an adaptive variable impedance controller of end-effector in the flexible environment, where the nonlinear force contact model is used to simulate the force contact response, and the nonlinear force recovery characteristic of the model is used to reduce the force overshoot and oscillation. And the adaptive variable impedance trajectory generator can obtain a smooth reference trajectory, which avoids excessive force overshooting by adjusting the impedance parameters online when the manipulator transforms from free space to nonrigid contact space.
In this section, the motion spaces of the robot are divided into flexible contact space and free space, where the contact force with the flexible environment is obtained by Duffing equation. According to the force contact model, the proposed PBAVITG is used to obtain the reference trajectory by adjusting the impedance parameters adaptively. And the FBAVIC is designed to realize the trajectory and desired force tracking of the manipulator, the uncertainties are approximated by FLS and a robust term is designed to estimate the approximation errors and external disturbances.
Position-based adaptive variable impedance trajectory generator
PBAVITG contains an internal position control loop and an external force control loop, which can transform force feedback into position trajectory correction error and modify the reference trajectory input of the manipulator by adjusting impedance three parameters (inertia M d , damping B d and stiffness K d ) of the impedance controller. Then, the target impedance equation of the robotic system is given as follows,
According to the contact force model Equation (5) with the flexible object, we have,
In free space, the end-effector does not exert force on the flexible environment, and the constant impedance controller is designed to track the desired position. In contact space, the variable impedance controller is used to track the desired force of the manipulator in the force direction. For convenience, we consider one-dimensional force in the vertical direction, the impedance relation can be written as,
where λ represents the sampling time of the controller, α is a positive constant. The discrete form of the reference trajectory is expressed as follows,
According to Equation (15), substituting Equation (17) into Equation (16), yields,
Simplifying and multiplying both sides of Equation (19) by g (x, t), we obtain,
Defining c (t) = Δf and r (t) = g (x, t) x d - f d , Equation (20) can be rewritten as,
Basing on the principle of dispersion, n elements of Φ series can be expanded as,
The initial value of Φ (t - (n + 1) λ) is generally set to 0, Equation (21) can be rewritten as,
According to the Laplace transform, the transfer function can be obtained as,
The characteristic equation of the system is as follows,
Assuming that n is a large enough number, we have
Then, the characteristic equation can be expanded by the Taylor series when the sampling rate is sufficient,
The stability conditions of the system can be obtained according to Routh stability criterion, yields,
Therefore, when the input is a step function and denoted as r (s) =1/s, the steady-state error in the frequency domain is as follows,
Considering the Equation (28), we can obtain,
Therefore, when t→ ∞, we have Δf → 0. The error between the actual contact force and the desired contact force converges to zero.
Unlike most adaptive variable impedance trajectory generators, we proposes a PBAVITG based on Equation (5). The impedance parameters can be updated adaptively to reduce the error of force tracking on the premise of ensuring the stability of PBAVITG.
Defining the position and velocity tracking errors between actual trajectory and reference trajectory,
Defining a composite error as follows,
Differentiating Equation (31) and multiplying M0 (x1) on both sides, we can obtain,
In this section, we use FLS to approximate the uncertain nonlinear function, i.e.,
Substituting Equation (36) into (33), the system error can be expressed as follows,
Noted that
Then, according to Assumptions 1 and 2, the minimum reconstruction error of FLS and the external disturbance is bounded as,
The adaptive law of FLS is designed as,
Considering Equation (40), we can obtain,
According to the updating law Equation (41), we can obtain,
Therefore, Equation (43) is bounded as,
The above Equation (46) can be rewritten as,
Then, the closed-loop system is stable based on the Lyapunov stability theorem. And solving the inequality Equation (47) yields,
According to the above analysis, the control structure of the closed-loop control system can be shown in Fig. 2.
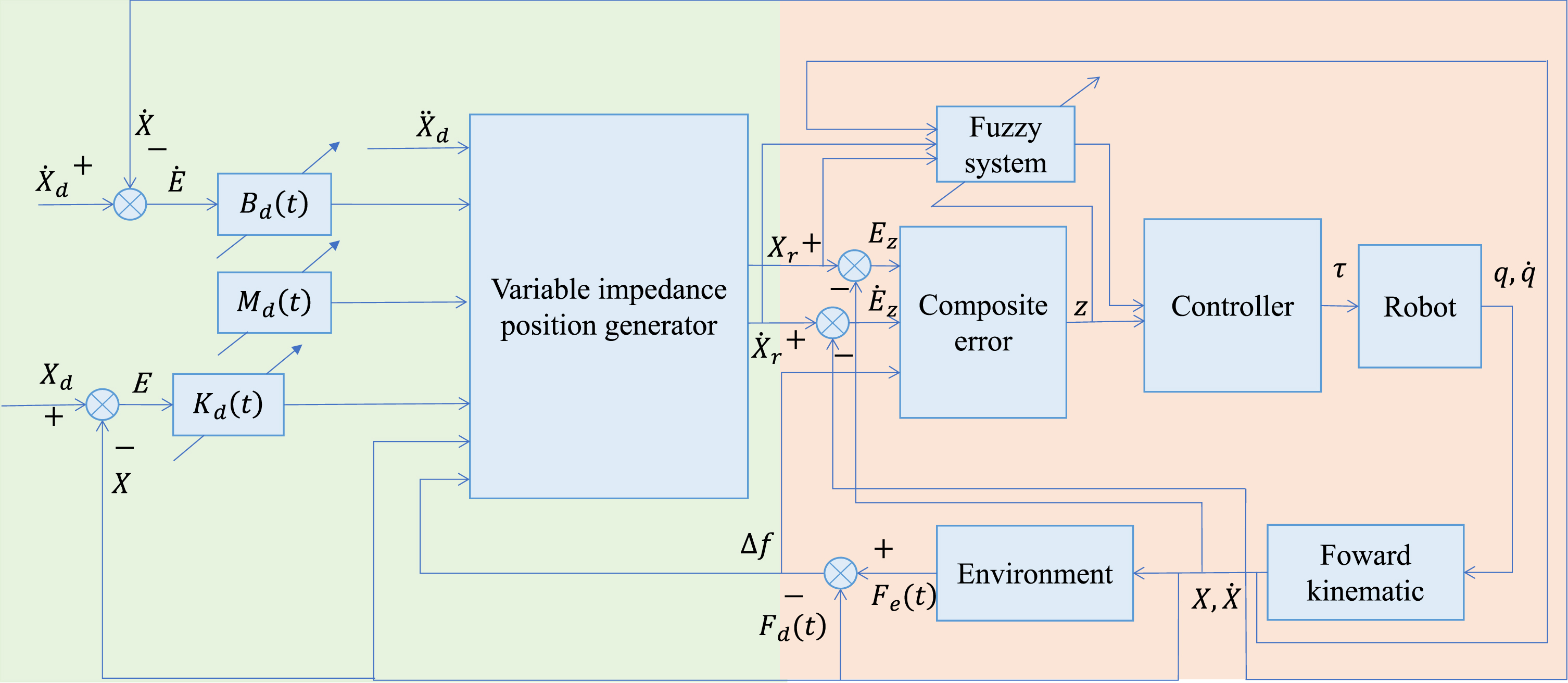
The schematic of the fuzzy-based variable impedance control for robotic system.
To verify the proposed method, simulation tests are conducted on a two-link manipulator as shown in Fig. 3. In practical applications, the controller receives the sensor signal and calculates the control torque based on the control program. By sending a torque control command, the motor of each joint drives the joint motion of the manipulator. The parameters of the two-link manipulator are described as follows,
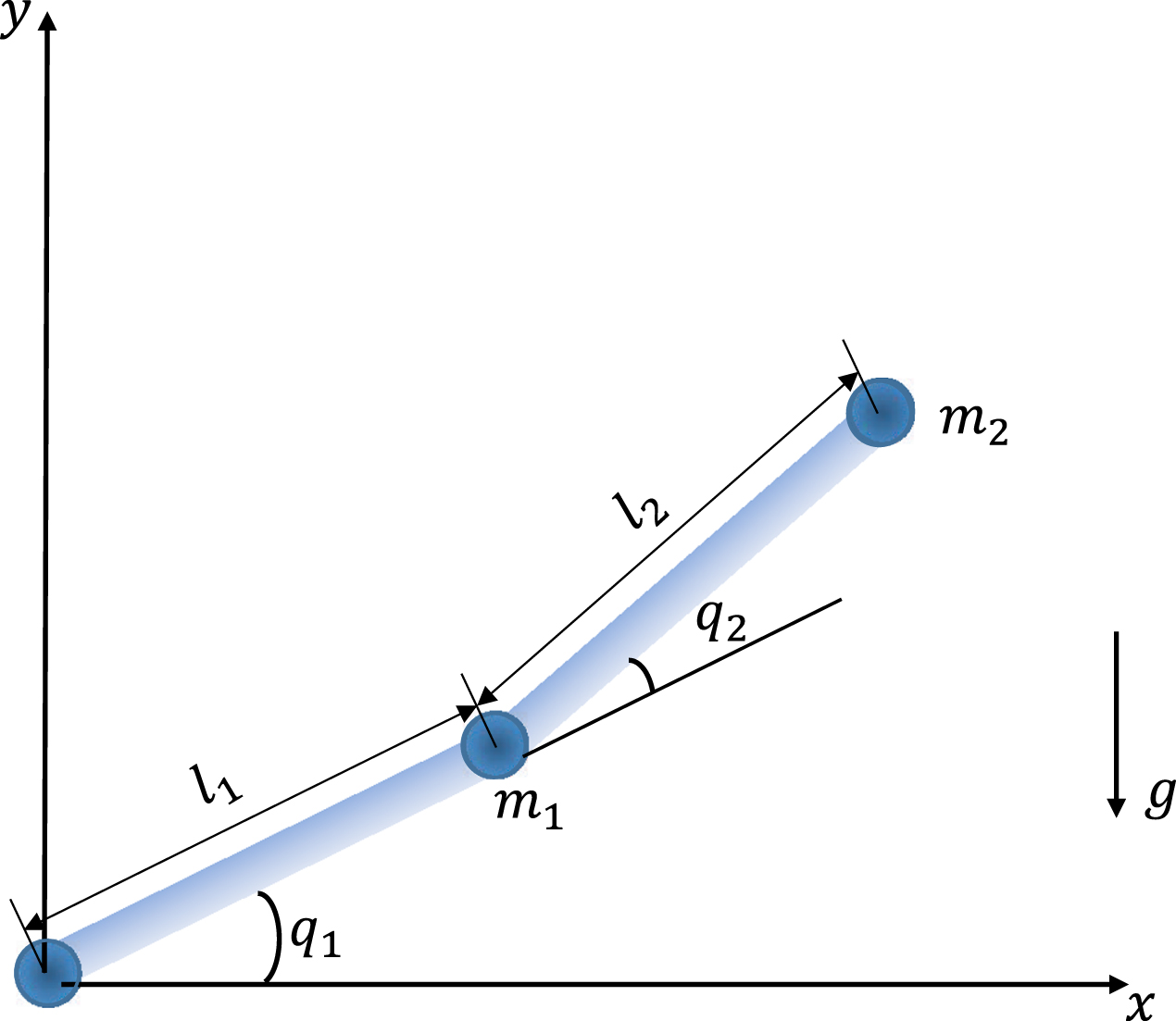
Diagram of a two-link robot manipulator.
where
To verify the proposed method in Section 3, the step-by-step procedures of the FBAVIC are outlined as follows,
where i = 1, 2, 3, l = 1, 2, 3, 4, 5. And select the learning parameter Γ= 100 in Equation (41).
In the subsection, two tests are conducted on the two-link manipulator. The actual parameters of the robot are m1 = m2 = 1 kg and l1 = l2 = 1 m, while the nominal parameters of the robot are chosen as m1 = 0.8 kg, m2 = 0.9 kg, l1 = 1.1 m, l2 = 0.9 m and g = 9.8 m/s2 to introduce the parameters uncertainties. Choosing the contact force Equation (5) in the x direction, where ω0 = 0.2 and
Example 1
Assuming that the desired force F d = [5, 0] T N is exerted on the manipulator as x ≥ x e ≥ 1 m in x direction. To test the performances of the force contact environmental model and the proposed PBAVITG, the adaptive variable impedance trajectory generator (AVITG) [43] is compared with the proposed method. In the AVITG, the traditional spring environmental model is used, and only the damping coefficient is adaptively changed by the force feedback error. Figure 4(a) and (b) show the force tracking results and errors for invariable force. The results of tracking the desired trajectory in the direction x and y of Cartesian space are shown in Figs. 6(a), respectively. Figured 5(b) and 6(b) illustrate the desired position tracking errors between desired and actual positions in the direction x and y of Cartesian space, respectively.
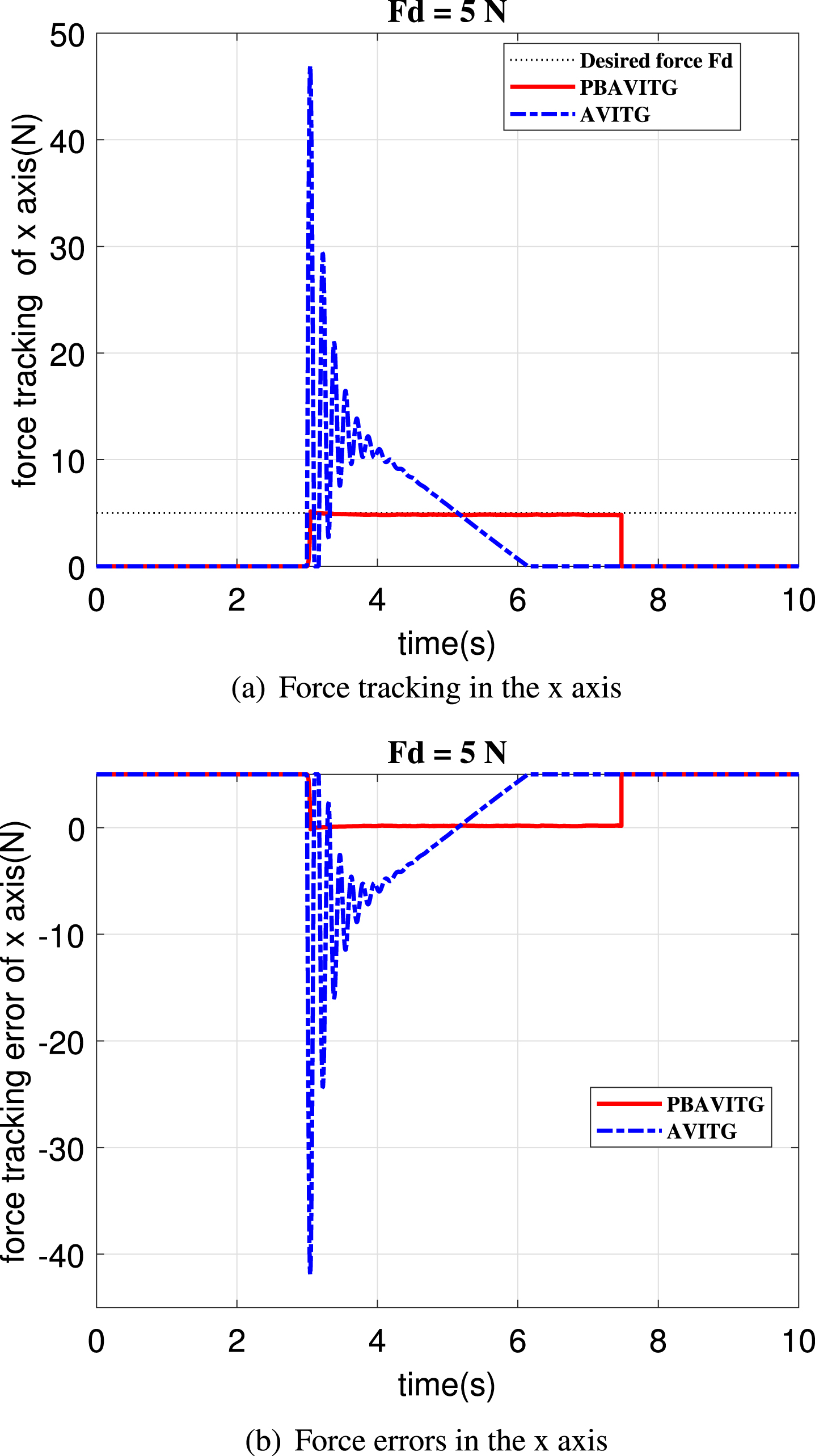
Force tracking and errors of PBAVITG and AVITG.
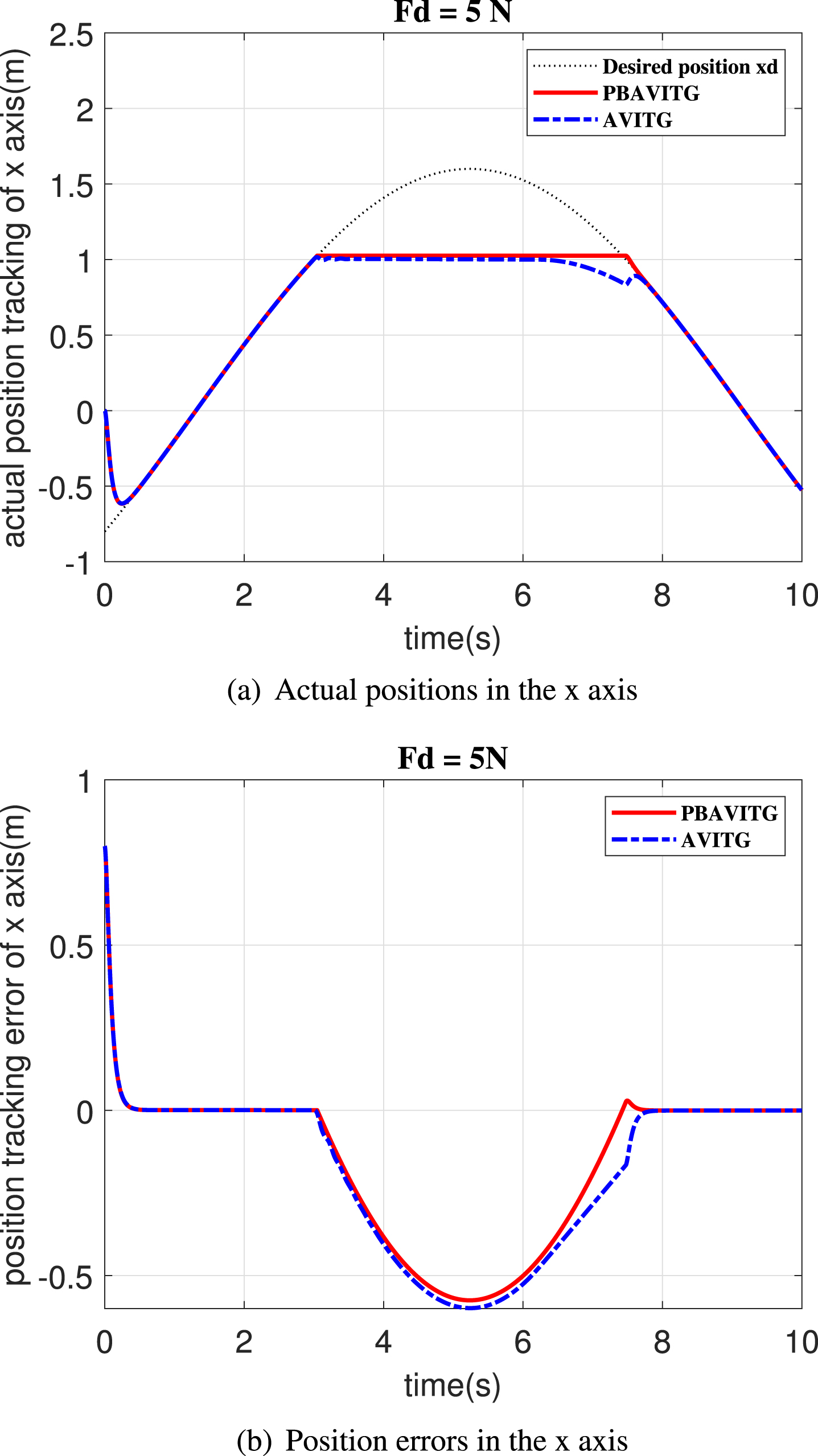
Actual position and errors of PBAVITG and AVITG in the x axis.
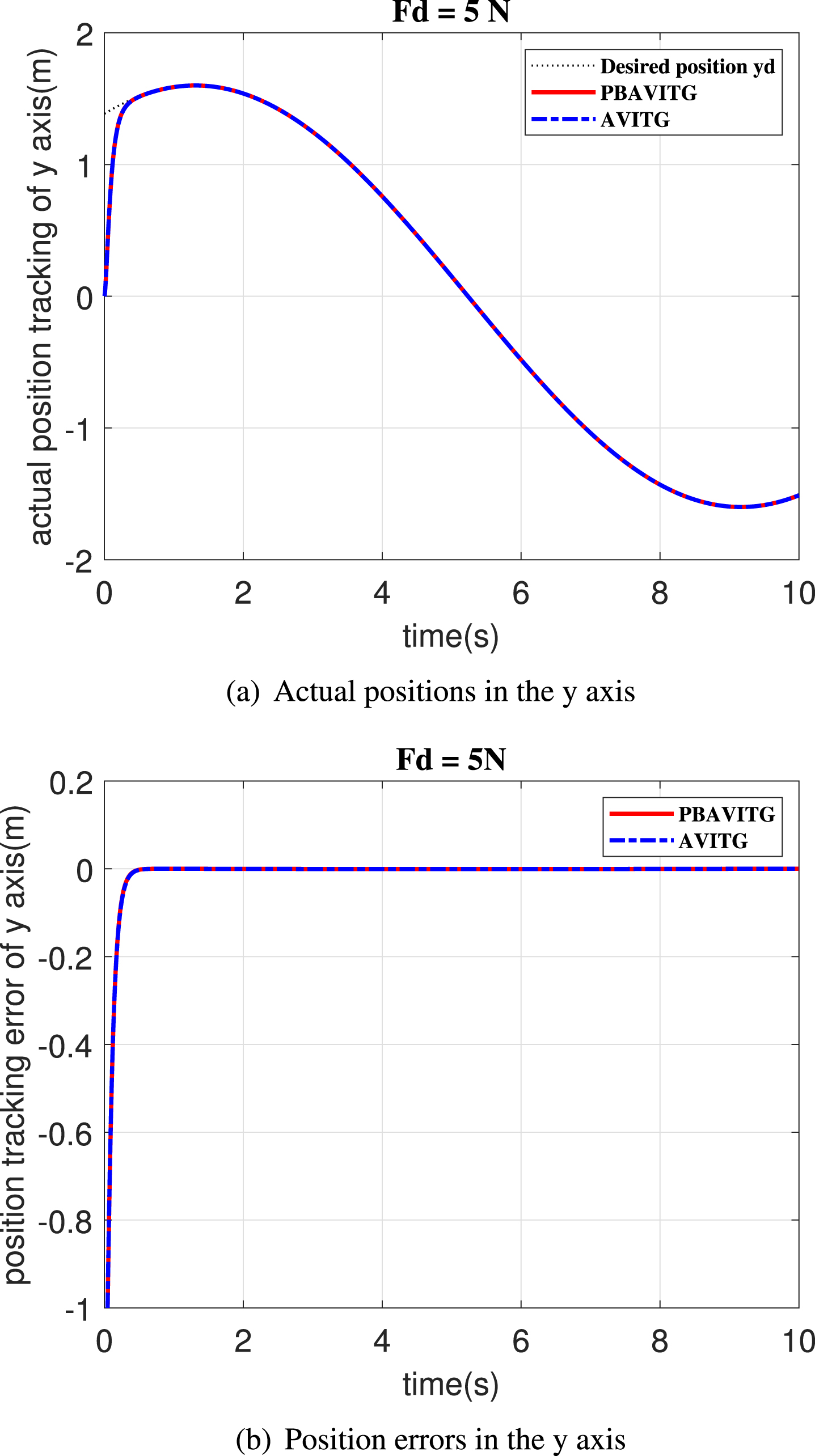
Actual position and errors of PBAVITG and AVITG in the y axis.
From Fig. 4, it can be found that the proposed PBAVITG has smaller error and less overshoot in the initial stage of force tracking in comparison to the AVITG, and the oscillation time is also longer in the AVITG. From Fig. 5(a), it can be seen that the proposed PBAVITG has a smoother trajectory in the direction x of Cartesian space, and the generated trajectory of AVITG in the force direction cannot track the desired force. The reason is that the model adopted in PBAVITG is derived from the nonlinear damping restorer model, and the nonlinear recovery term is added to characterize the contact response in comparison to the spring model adopted in the AVITG, which can reduce the impact force when the manipulator contacts with the flexible environment. Moreover, the behavior of the contact force in a flexible environment is only expressed by the stiffness coefficient, which is not only inaccurate but also too stiff in the conversion process. The spring model may produce a larger overshoot and long-term oscillation at the instant of contact. Therefore, when the manipulator transforms from the free space to contact space, the overshoot of PBAVITG is smaller than that of AVITG, and the oscillation time of PBAVITG is shorter than that of AVITG in the initial stage of force tracking. In Fig. 6, it can be seen that the two methods have good track tracking performances in the direction y of Cartesian space. Although the AVITG can obtain a smooth trajectory and has a good control performance in the case of direct contact with the environmental model, it is not applicable in the case of spatial transformation in the simulation test. The reason is that the transformation of space and the nonlinear contact force requires high adaptability of the control method. Therefore, the above results indicate that the performance of PBAVITG is better than that of AVITG, and the superiority of the nonlinear force contact-based environmental model and the adaptability of the variable impedance control method are verified.
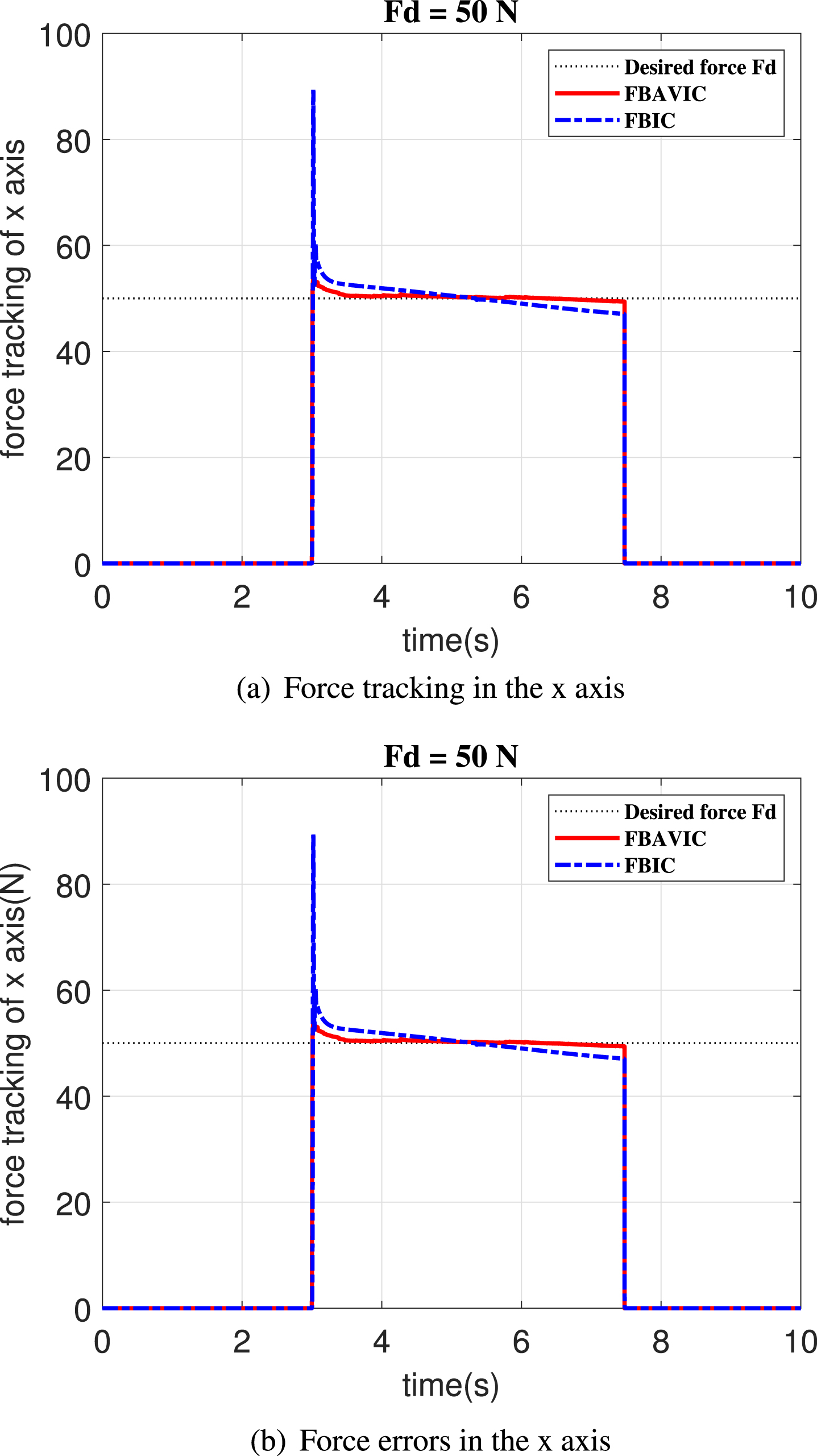
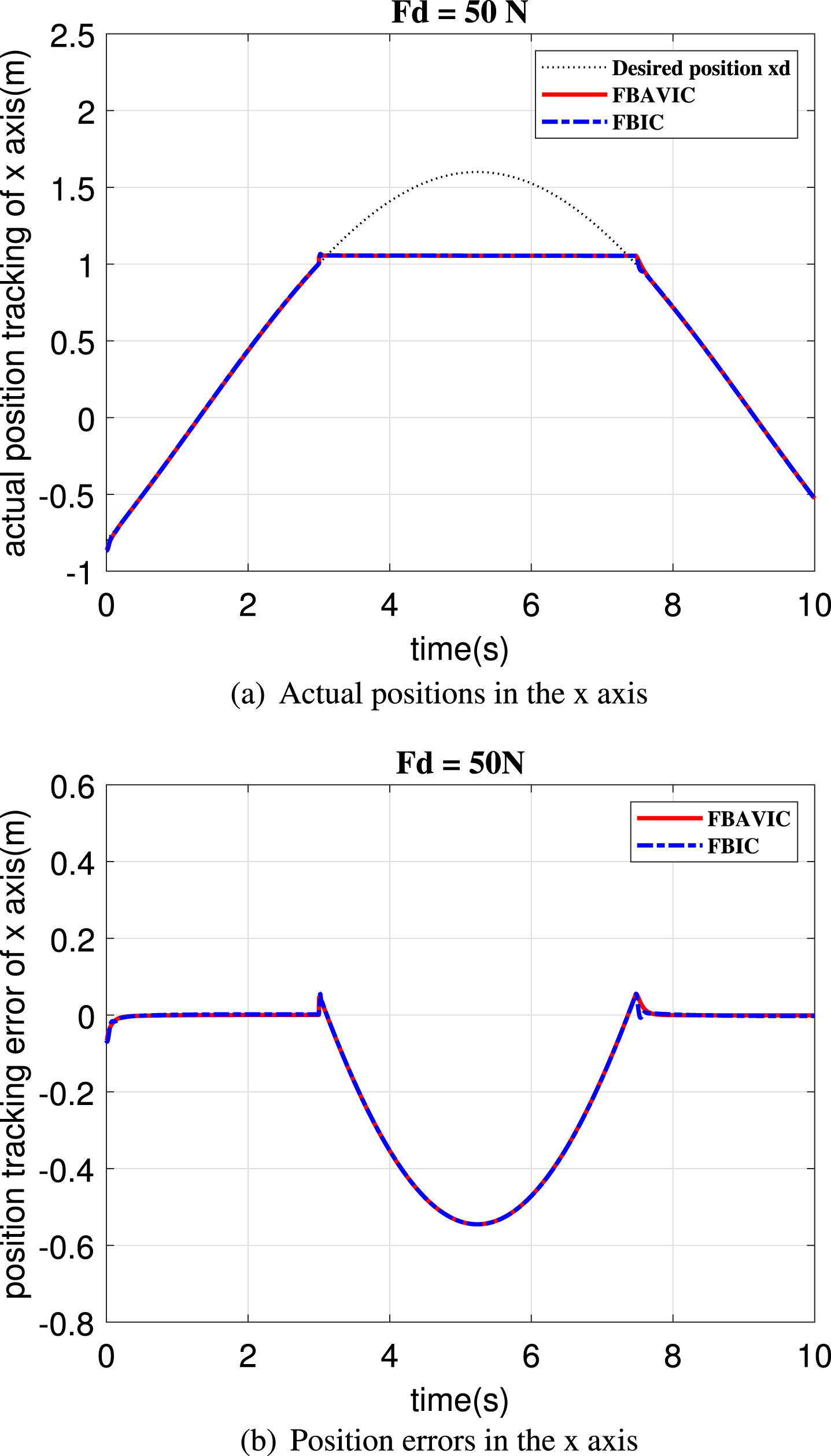
The desired force F d = [50, 0] T N is exerted on the end-effector to verify the performance of the proposed FBAVIC. The two groups of methods adopt the nonlinear environmental model mentioned in this paper, but the control methods are different. The proposed FBAVIC is compared with fuzzy-based impedance control (FBIC) for specific flexible environmental models considering the uncertainties and disturbances of the manipulator. In this experiment, Fig. 7(a) and (b) show the force tracking results and errors of FBAVIC and FBIC. Figures 9(a) show the results of tracking the desired trajectory by two methods in the direction x and y of Cartesian space, respectively. Figures 9(b) show position tracking errors between the desired and actual trajectories in the direction x and y of Cartesian space, respectively. Figure 10 shows the variation of adaptive impedance parameters in contact space. Figure 11 shows the motion space and position tracking of the end-effector. Figure 12 shows the update rate of adaptive adjustment parameters of FLS.
Force tracking and errors of FBAVIC and FBIC.
Actual position and errors of FBAVIC and FBIC in the x axis.
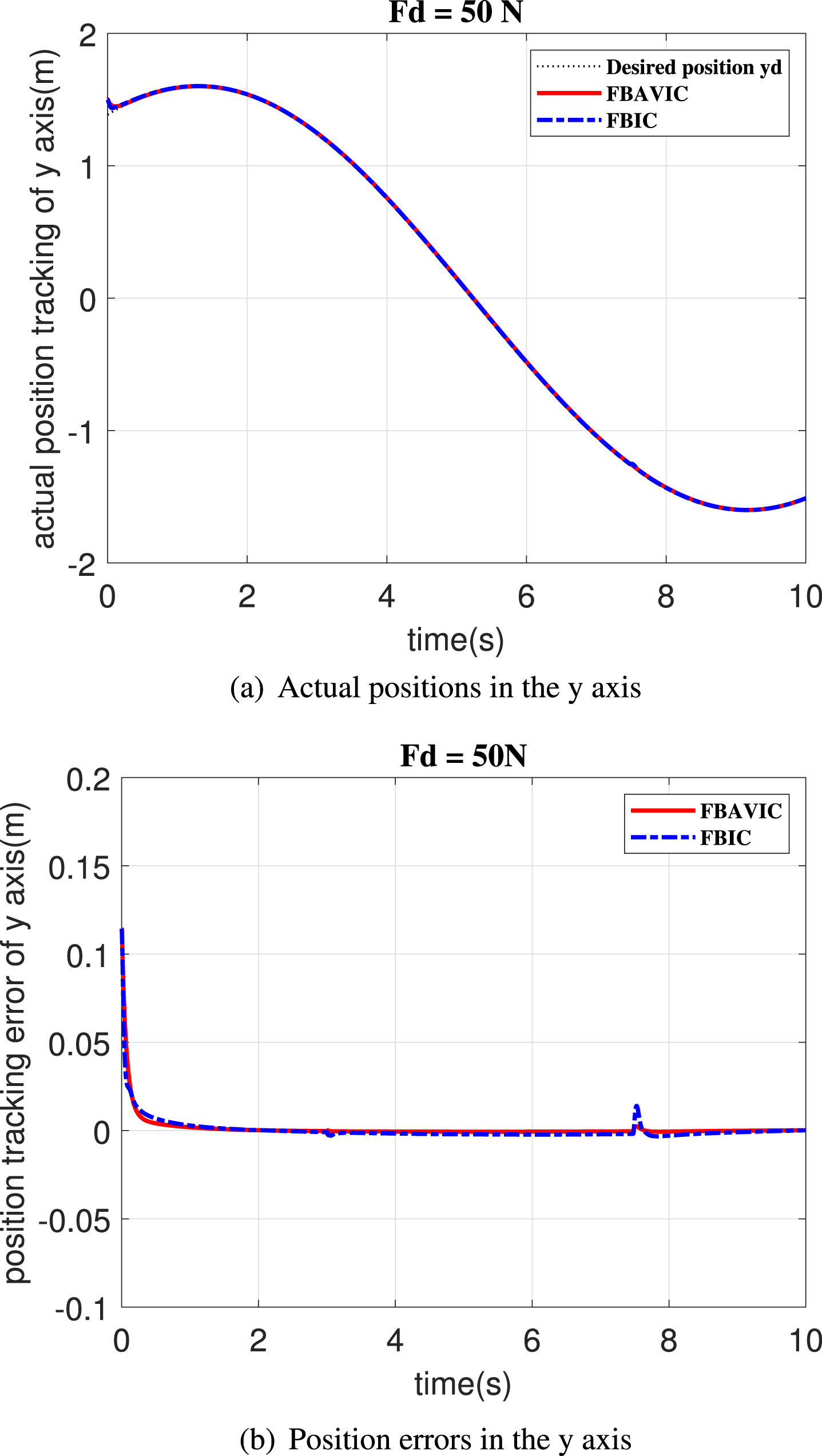
Actual position and errors of FBAVIC and FBIC in the y axis.
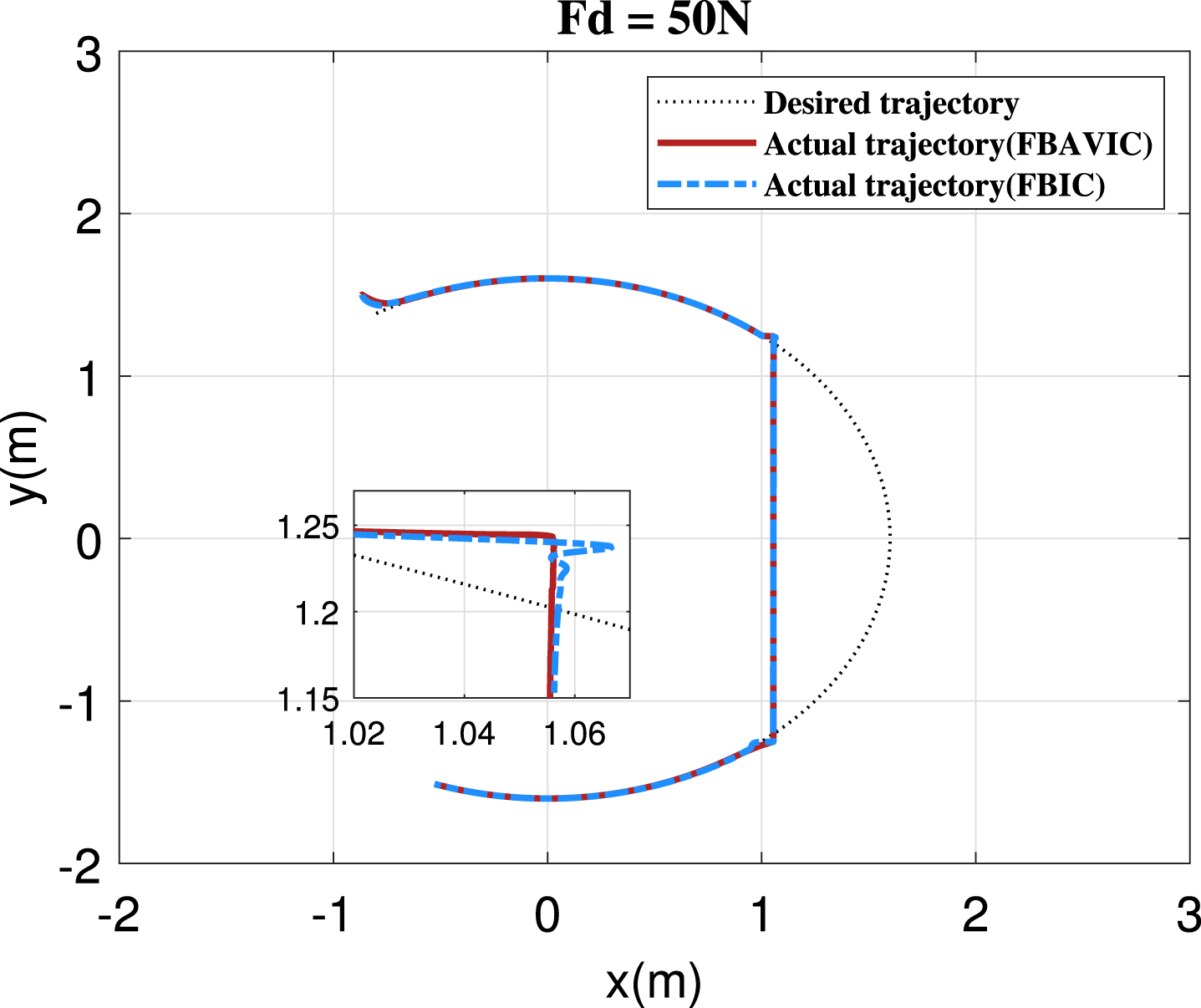
Position tracking of end-effector.
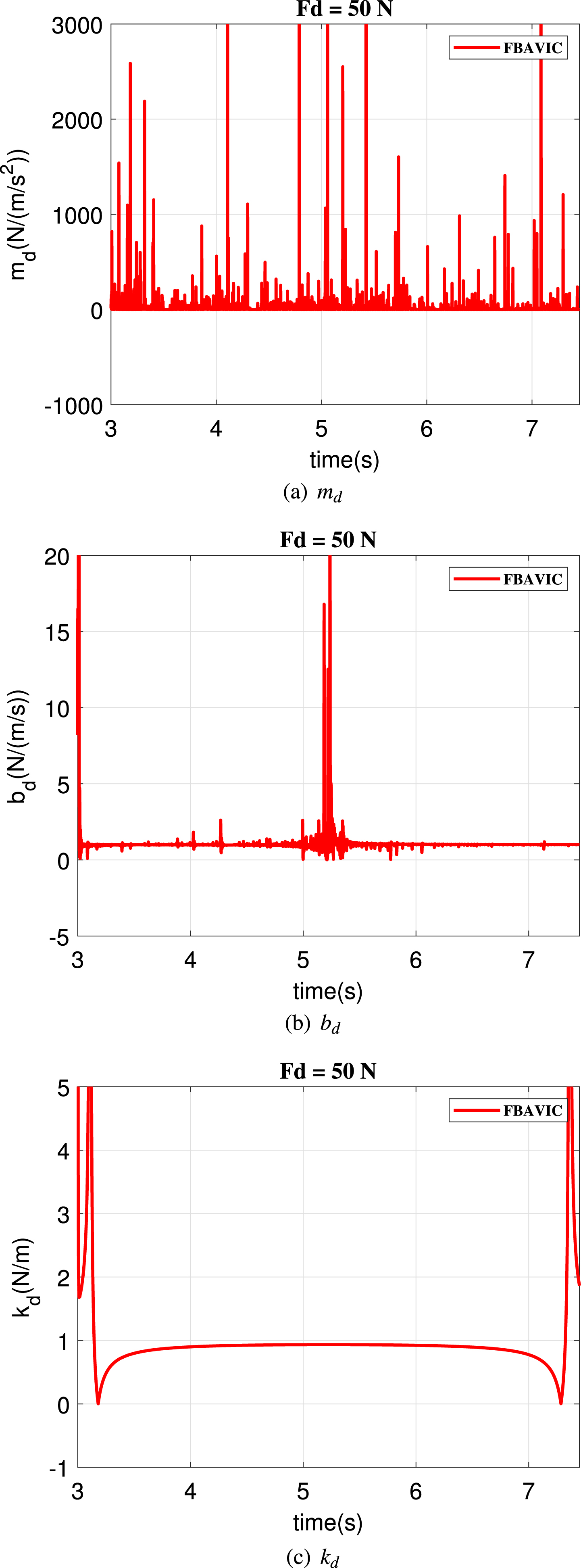
Adaptive impedance parameter variation diagram.
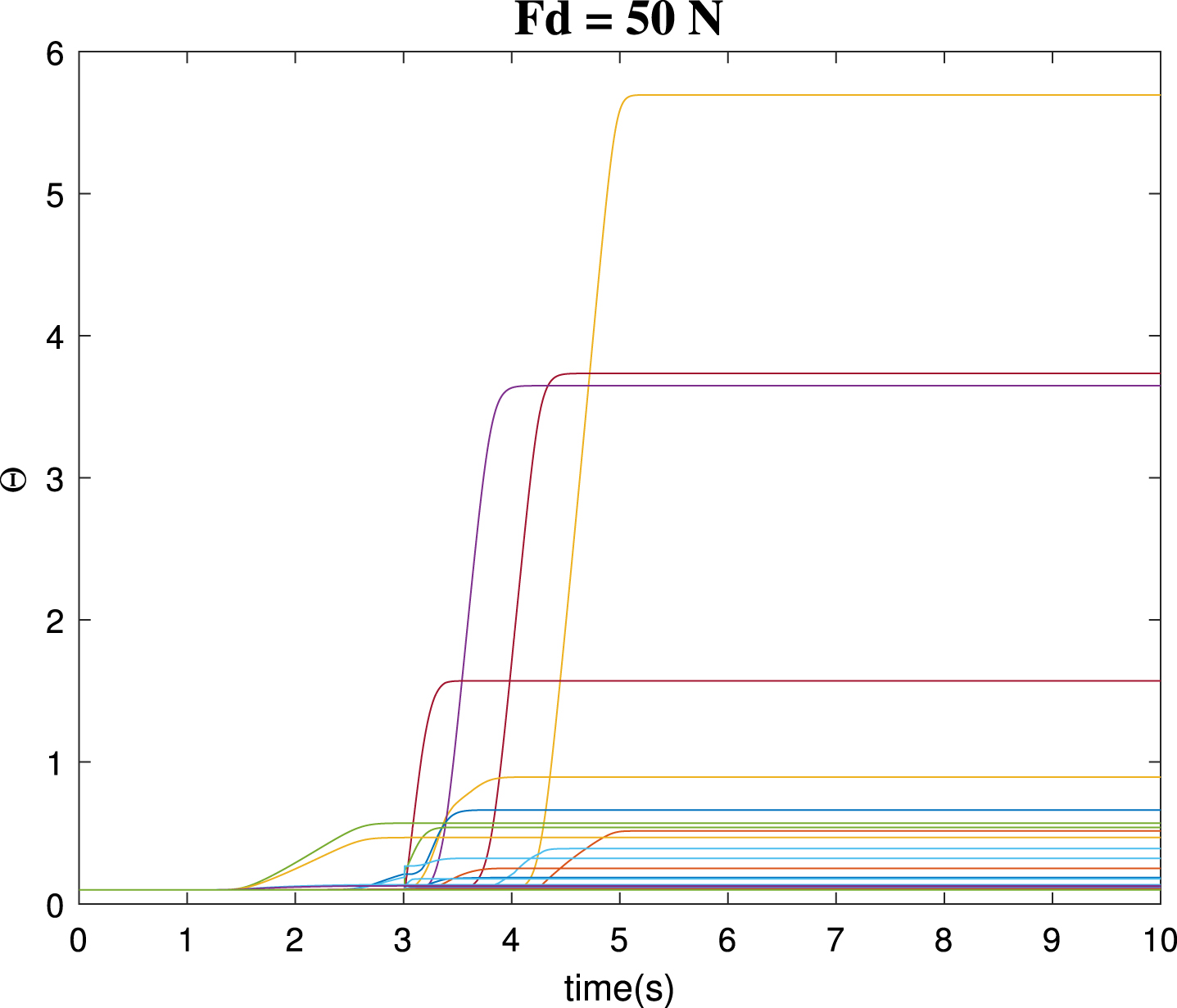
Adaptive adjustment parameters of FLS.
From Fig. 7, it can be found that the overshoot and the force tracking error of the proposed FBAVIC are significantly reduced in comparison to those of the FBIC. The reason is that the impedance parameters in the FBAVIC are updated adaptively, and the variable impedance adaptive law is relevant to the feedback errors of force and position. Due to the real-time feedback of force error in the process of force tracking, the adaptability of the proposed FBAVIC can achieve better robustness than that of FBIC. Therefore, the force tracking performance of the proposed FBAVIC is better than that of FBIC. From Figs. 8-9, it can be seen that the position tracking performance of the proposed FBAVIC is similar to that of FBIC. This is because both of them use the same nonlinear contact force model, which has a better response in characterizing the manipulator’s contact with the flexible environment. From Fig. 10, it can be seen that the position tracking performance of the proposed FBAVIC is better at the moment of contact because the variable impedance control improves the force tracking performance. Since there is no interaction force in the y direction and only position tracking is involved, both FBAVIC and FBIC show good position tracking performances. Figure 11 shows the adaptive impedance parameters that are determined by the adaptive law. Figure 12 shows that the adaptive parameters of FLS are bounded and converged to the optimal values in a finite time.
According to the above analysis, it can be concluded that the proposed FBAVIC not only reduces the force overshot and oscillation during contact but also make the force tracking error smaller than FBIC, which meets the design requirements and improves the adaptability and robustness of the system.
In this paper, a fuzzy-based adaptive variable impedance control is proposed for the robotic system in the flexible environment. In this control scheme, according to the nonlinear force contact-based environmental model, an adaptive fuzzy variable impedance controller is designed to track the desired contact force trajectory of the manipulator. And the impedance parameters are adjusted adaptively according to force feedback. The boundness of force/position tracking errors and the stability of the controller are proved by the Routh stability criterion and Lyapunov stability theory. And the FLS is used to compensate for the uncertainties of the robotic system. Finally, the effectiveness and feasibility of the proposed control strategy are verified by simulation on a two-link manipulator. In future work, the proposed method will be proven experimentally and applied to real robotic systems.
Footnotes
Acknowledgments
The authors would like to acknowledge the funding supported by the National Natural Science Foundation of China (NSFC) (62273311, 61773351, 61733004) and the Key Specialized Research and Development Breakthrough in Henan Province, China (222102220117).