
Abstract
This paper presents a novel hexapod robot, hereafter named PH-Robot, with three degrees of freedom (3-DOF) parallel leg mechanisms based on the concept of an integrated limb mechanism (ILM) for the integration of legged locomotion and arm manipulation. The kinematic model plays an important role in the parametric optimal design and motion planning of robots. However, models of parallel mechanisms are often difficult to obtain because of the implicit relationship between the motions of actuated joints and the motion of a moving platform. In order to derive the kinematic equations of the proposed hexapod robot, an extended hierarchical kinematic modelling method is proposed. According to the kinematic model, the geometrical parameters of the leg are optimized utilizing a comprehensive objective function that considers both dexterity and payload. PH-Robot has distinct advantages in accuracy and load ability over a robot with serial leg mechanisms through the former's comparison of performance indices. The reachable workspace of the leg verifies its ability to walk and manipulate. The results of the trajectory tracking experiment demonstrate the correctness of the kinematic model of the hexapod robot.
Keywords
Introduction
Mobile robots possess tremendous potential for displacing workers and extending the available environment of humans. Their enhanced mobility render mobile robots appealing for grabbing, transporting, welding, drilling and operating functions. In terms of mobility, hexapod walking robots are superior and more practical for use in uneven terrain or irregular environments with obstacles and gaps [1, 2].
Most conventional robots are designed to have both handling mechanisms and mobile mechanisms. Inspired by some insects that use legs as arms to manipulate their food, hexapod robots can offer superior flexibility using integrated leg and arm mechanisms [3–9]. In [3, 4], the concept of ILM (integrated limb mechanism) was presented. A six-bar linkage mechanism with 4-DOF used for manipulation and locomotion was verified [3, 4], Later, two prototypes, “MELMANTIS-1” and “MELMANTIS-2” were developed [5, 6]. In reference to [7, 8], a new walking robot named “ASTERISK” based on the concept of ILM was developed. In [9], a modular and reconfigurable robot “MiniQuad” was developed, which has the ability to pack objects. All of the previously mentioned robots have one aspect in common: their leg mechanisms are serial mechanisms.
It is well-accepted that parallel manipulators yield better performance than serial manipulators in terms of accuracy, rigidity and load ability [10,11]. Due to these advantages, many researchers have applied parallel mechanisms to walking robots. Takanishi Laboratory of Waseda University of Japan developed the world's first biped robot with parallel leg mechanism WL-15 and is currently developing the latest generation of WL-16RIV [12]. The leg of WL-16RIV has 6-DOF. Qi et al. introduced a reconfigurable quadruped/biped walking robot in [13].
Inspired by the studies noted above, we attempted to implement ILM hexapod robots with leg- and arm-utilizing parallel mechanisms. However, parallel manipulators, especially 6-DOF parallel manipulators, always have smaller workspaces compared to serial manipulators. In reference to [14], a novel 3-DOF parallel mechanism known as a 1-UPȦ2-UPS manipulator (UPS = Universal, Prismatic and Spherical, respectively), was presented, which has wide workspace and high motion performance. Consequently, in this paper, a new hexapod robot named PH-Robot (Parallel Hexapod Robot) with a parallel leg mechanism, i.e., 1-UPȦ2-UPS is proposed.
The legs of the PH-Robot can be used for both locomotion and manipulation, rendering the proposed robot compact and light, as two functions are integrated into one linkage, while the robot retains the advantages of parallel mechanisms. In addition, the PH-Robot is easily protected against water and other risks of damage, thanks to the base-mounted actuation arrangement, which is very important for field robots. The performance capabilities of the PH-Robot will be verified by kinematic analysis.
The kinematic model plays an important role in evaluating and optimizing the parameters of mechanisms [15–19]. The calculations of Jacobian and Hessian matrices of parallel mechanisms are extremely complex as per the directly differentiating method caused by the multi-closed loop topology. In reference to [20], the hierarchical approach was utilized to derive the Jacobian matrices of multi-body systems. In [21], the modular modelling approach was presented to derive dynamic models of multi-body systems. We extended the hierarchical or modular modelling approach to obtain the kinematics of the provided parallel robot PH-Robot, which included not only the velocity analysis, but also the displacement and acceleration analyses. Thus, the proposed hierarchical modelling approach can simplify the process of kinematic modelling.
After completing kinematic modelling, the dimensional synthesis will be implemented according to the kinematic model. It is well-accepted that the condition number of the velocity of the Jacobian matrix is one of the most suitable local performance measures for evaluating the dexterity, accuracy and velocity isotropy characteristics between the actuated joint variables and the reference point of the moving platform [22–25]. In addition to the condition number of the velocity of the Jacobian matrix, payload index according to the force of the Jacobian matrix was proposed in [22, 26]. We present a comprehensive optimal function for optimizing the geometric parameters of the parallel leg mechanism by considering both kinematic performances and payload capability, because the target of the design is to implement the concept of ILM.
The remainder of the paper is organized as follows. In section 2, we present the topology structure of the robot. In section 3, we use the hierarchical modelling approach to derive the kinematic model. Section 4 is based on the Jacobian matrix and provides optimized geometrical parameters according to a comprehensive cost function. In section 5, we analyse the reachable workspace of the integrated limb mechanism of the leg and arm; additionally, the trajectory of the foot and body is calculated.
Topology structure of the PH-Robot
Figure 1 shows a virtual PH-Robot prototype. The schematic diagrams for the PH-Robot are shown in Figures 2 and 3. Different to most insects that present directivity when walking this robot's legs are arranged on the vertices of a regular hexagonal body. Thus, the robot has omnidirectional mobility and manipulability. Each leg is composed of three chains: 1 UP and 2 UPS. Here, P pair denotes the actuated joint driven by an actuator. The DOF of one leg can be calculated using the Grübler–Kutzbach criterion:

where M denotes the number of DOF, n the number of links, g the number of joints and f i the DOF corresponding to the ith joint. Here, the links of one leg consist of seven parts, including the static platform (the body) and the movable platform (the part of the foot) relative to the body. Three-DOF parallel mechanisms are more suitable for use in the integrated leg and arm mechanism, because they usually have wider motion spaces than 6-DOF parallel mechanisms. The DOF of the overall robot also can be calculated by the Grübler–Kutzbach criterion:

where λ is the number of legs that touch the ground.

Geometry model and photograph of PH-Robot; 1: body, 2: universal joint, 3: linear actuator, 4: spherical joint
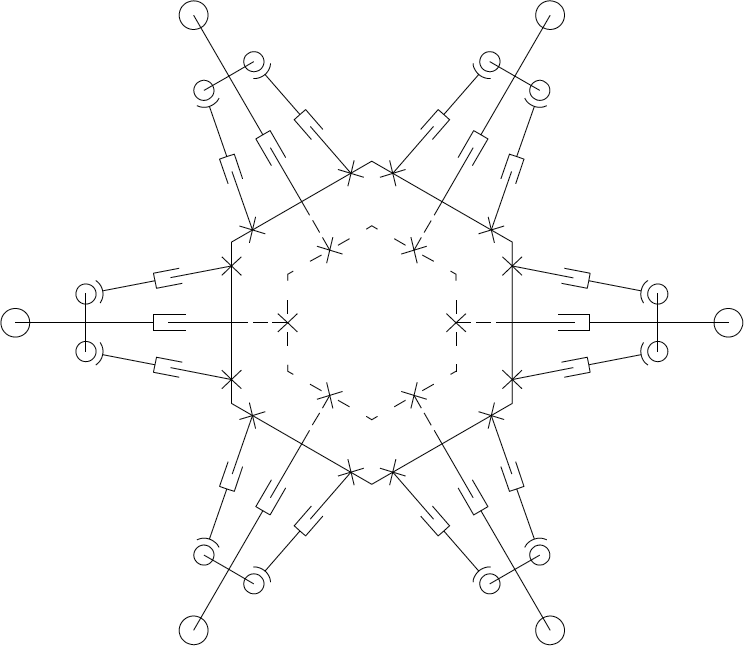
Schematic diagram of PH-Robot
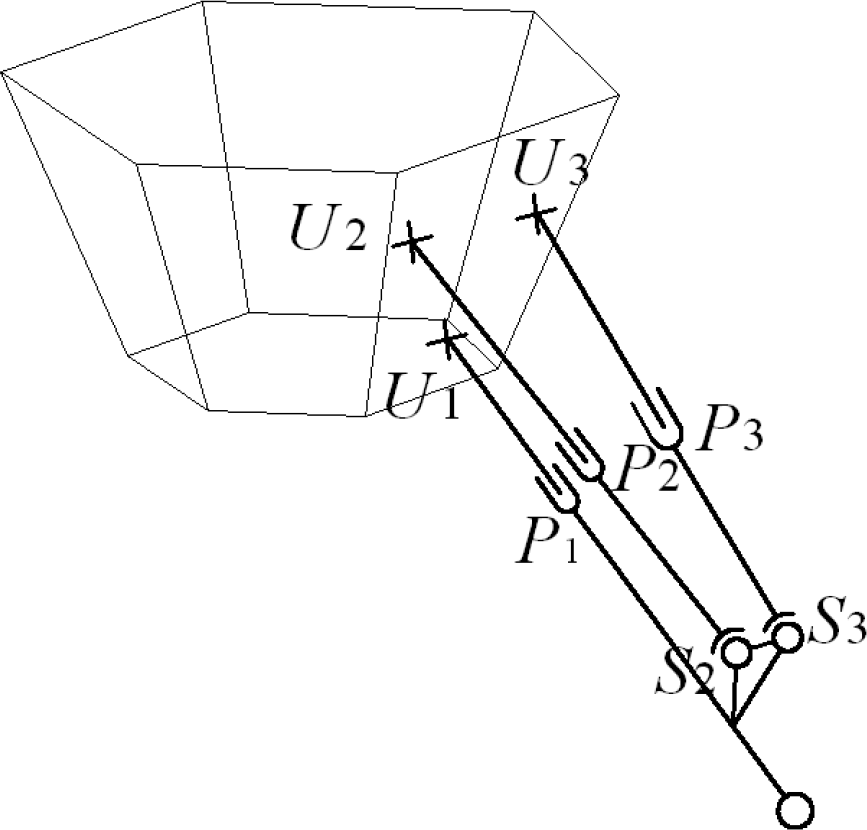
Schematic diagram of one 3-DOF parallel leg
Thus it can be seen that, no matter how many legs support the body, the DOF of the entire robot is 6. It is worth noting that the spherical foot is considered to be an S pair, while the swinging legs and the body is considered as the same part. As for the full robot, the ground is the relative static platform and the body is the movable platform relative to the ground.
Hierarchical modelling approach
The kinematic model concerns the motion relationship between the end-effector and the actuated joints. The displacement relationship can be represented as follows:

where,

we can derive the relational expressions between

because the Jacobian matrix and Hessian matrix are easier to derive according to Eq. (4) than according to Eq. (5). The velocity and acceleration relationships have the following equations,


where

so that the Jacobian matrix can be expressed as

Similarly, according to Eq. (7), we can obtain the acceleration relationship recursively. It should be noted that the vector of generalized coordinates, i.e.,
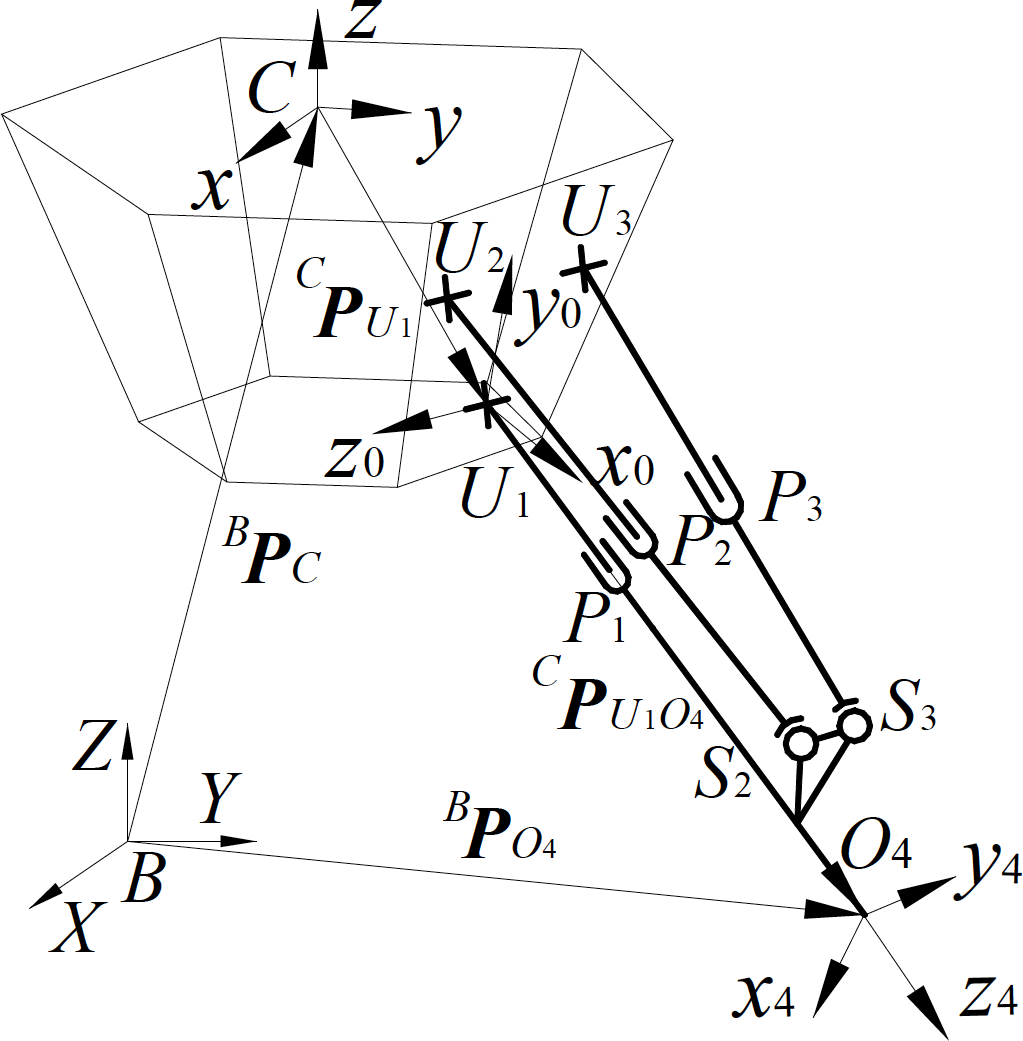
Figure 4 shows the coordinate frames of the PH-Robot, where B - XYZ is an inertial base frame (global frame) fixed on the ground and C - xyz is a local frame fixed on the body. We separated U1 into two revolute pairs, but the distance between the two revolute pairs was 0, i.e., d = 0. The rotational angles of U1 were defined as θ1 and θ2;U1−x0y0z0 was fixed on the body while the coordinate origin coincided with the geometrical centre of U1. The other coordinate systems were similar to what is usually defined in serial mechanisms. O4 was the end point of the leg and was considered as the foot. It should be noted that the plane constructed by the three points O3, S2 and S3 was perpendicular to the axis of P1.
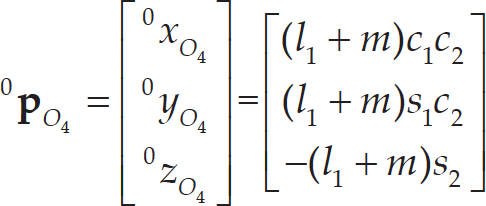
Directly deriving the equation of
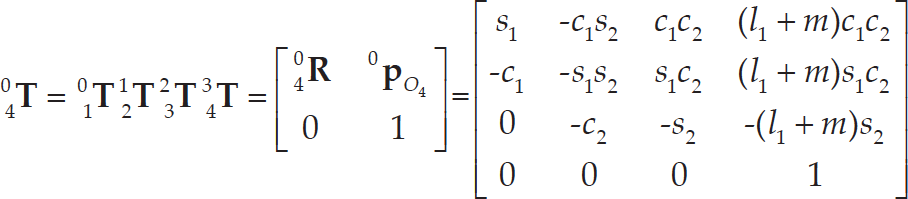
where s1, c1, s2 and c2 refer to sinθ1, cosθ2, sinθ2 and cosθ2, respectively, and where m denotes the fixed range between O3 and O4. The following equation thus follows:

Coordinate frames of the leg mechanism
The inverse kinematic problem between 0

The following equation was derived from the geometrical relationship:

where

Thus, we can see that the inverse kinematic process is as follows: when


The complete expressions for Eq. (17) and (18) are given in Appendix A. According to Eq. (17) and (18), we can obtain the following equation,

Similarly, differentiating between Eq. (17) and


where,

where * denotes a generalized scalar product [10]. The generalized scalar product of two matrices

where
In order to implement the robot body's motion, we needed to derive the inverse kinematic model, which can in turn obtain the motion for the supporting legs' actuated joints when
B

According to Eq. (24), we obtain

In addition, the following equation exists,

Integrating Eq. (25) and (26) yields

As noted previously,
Vector diagram for supporting leg and body
Next, the velocity relationship between body motion and supporting legs motion was derived. We set the velocity vector of the body as

Differentiating Eq. (24) and (26) yielded


According to Eq. (29), Eq. (30), we obtained

Substituting

Defining

Thus, we obtained

It is necessary to point out that

where

After substituting

Substituting

Since the design is aimed at presenting a robot with integrated legs and arms, kinematic performance is very important to this robot. In this section, the optimum design of the PH-Robot will be carried out with an emphasis being placed on the determination of the geometric parameters that enable a global kinematic performance to be achieved.
Dimensional variables
Dimensional synthesis primarily refers to the geometric parameters of one leg of this six-legged robot. Figure 6 shows the side elevation of one leg; h1, α1, r1, r2 and r3 are provided according to the requirements of different tasks assigned to the robot, which are the objective variables of its design. Additionally, α1 and α2 influenced the magnitude of the force generated by linear actuators. The component of ground reaction force on the leg in the direction of

Next the variables a y , a z , b x and b y will be optimized by performance indices.
Condition number of the Jacobian matrix velocity
According to Eq. (19), the condition number for the velocity of the Jacobian matrix can be defined as follows:

where Σmax and a Σmin are the maximum singular value and the minimum singular value of the Jacobian Matrix and
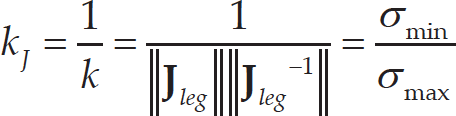
where 0 kJ, ≤ 1 and the bigger the k J is, the better the dexterity. However, k and k J are simply local indices that are solely dependent on the configuration of the system; based on this, a global dexterity index (GDI) is proposed by [28] as follows:

where V is the total workspace volume. As there exist no closed-form solutions for Eq. (43), the integral of the dexterity must be calculated numerically, which can be approximated by a discrete sum:

where N denotes the points distributed over the total workspace.

Schematic diagram of design variables
In order to realize locomotion and manipulation, the leg should have high performance in force transmission. As is well-known, the mapping relation expression between forces applied at the movable platform under static conditions and forces of actuators can be derived from Eq. (19) according to the principle of the virtual work, as follows,

where

When the vector τ is unity, the extreme of


where λ
Fi
(i = 1, 2, 3) are the eigenvalues of the matrix

Similarly, a global payload index (GPI) that can estimate the payload capability in the total workspace can be defined as follows:

where N is the same variable as in Eq. (44).
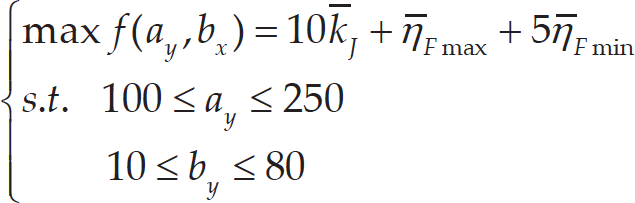
In order to consider both dexterity and payload, a global and comprehensive objective function f(a y , b x ) is employed for maximization:

where μ i (i = 1, 2, 3) is the weight coefficient. Eq. (51) is a class of optimization problem for constrained nonlinear multivariable functions.
Utilizing the design methodology proposed in the present study, an example for dimensional synthesis was carried out. Preparatory dimensional ranges were determined according to the requirements for expected work capabilities according to section 4.1, as follows:

Except for the length range constraints, universal joints and spherical joints were limited to allowable angle ranges. That is,

According to Eq. (53) and the definition of θ1 and θ2 in subsection 3.2, yields,

Then, the discourse domain of two independent variables were set,

Now, when a
y
and b
x
are given, the workspace can be derived according to Eqs. (52) and (53), which means that the points distributed over the total workspace and condition number corresponding to every point, i.e., N and k
J
, can be solved. Firstly, the effects of a
y
and b
x
on

Variations of
According to Figure 7,

Then, the constrained nonlinear multivariable function yields,
Equation (57) can be solved by the function “fmincon” in Matlab. The result derived by Matlab is:

It should be noted that bx = 38.1mm cannot be achieved in practice. Table 1 shows the geometrical parameters of our prototype following the above optimization and by considering the physical interference of three linear actuators.
Geometrical parameters of prototype
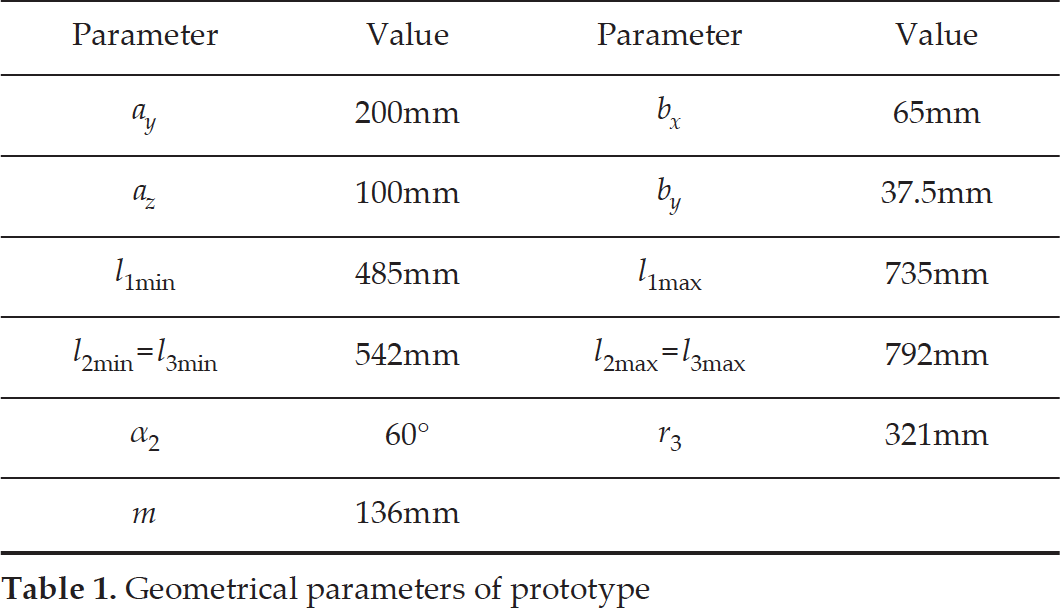

Diagram of a 3-DOF serial leg mechanism
In order to compare the performance indices for the robot with serial and parallel leg mechanisms, we calculated

The result was

Referring to Figure 7, the performance indices of the serial leg mechanism were smaller than the minimum values of the three indices of our proposed robot, respectively, which means that the parallel leg mechanism exhibited distinct advantages in terms of accuracy and load ability.
Workspace of the integrated leg and arm
After the geometrical parameters are provided, the workspace of the leg can be determined via several algorithms [28–30]. In this paper, due to computing the configuration corresponding to every point over the entire reachable workspace during the process of the dimensional optimization, a discrete method via solving forward kinematics was employed to determine the reachable workspace in three-dimensional Cartesian space. The algorithm consisted of three nested loops that traversed the strokes of three limbs at the same step length, respectively, while the forward kinematic Eq. (16) was solved using the numerical method. If Eq. (53) was satisfied, the point evaluated by Eq. (11) was recorded as one point of the set of the reachable workspace. The proposed algorithm was implemented in Matlab using the date given in Table 1.
Figure 9 (a) shows the workspace of leg 1 as represented by a scatter diagram, in three-dimensional Cartesian space of the inertial base frame and referring to the location of the robot shown in Figure 12. Here, the constraint of the ground was not taken into account. The diagram of workspace described by scattered points indicates that the condition number, i.e., k, was bigger on the edge of workspace, because the points turn sparse when near the edge, which means the kinematic performance declines near the edge. Figure 9 (b) shows a vertical view of the workspace. According to Figure 9 (b), we can obtain the shared workspace of two neighbouring legs. The virtual prototype and physical prototype both demonstrated that two neighbouring legs can pick up an object through coordination, as shown in Figure 10. Therefore, the wide workspace allows the leg to have both the abilities of manipulation and locomotion.

Workspace of the integrated leg and arm

The simulation and experimental results of object packing
With respect to the movement of a walking robot, there remains important work to complete using inverse kinematics, which is, according to the trajectory planning of the foot, derived from the displacements, velocities and accelerations of actuators. Sending the results of inverse kinematics to servo motors, the trajectory tracking control is implemented without regard for frictions, clearance and sliding.
The cycloid curve was chosen as the foot trajectory due to its smooth motion virtue. Let us consider the tripod gait motion for example, as shown in Figure 11. Set the trajectory function of the foot and body, respectively, as follows,


where [x(t) y(t) z(t)] T is defined as the coordinate of reference point on the foot and body in an inertial base frame B - XYZ, H and S denotes the step height and step side, respectively and T denotes the gait cycle. Here, we set


Schematic diagram of the tripod gait

Motion profile of the foot and body
Initial parameters of tripod gait

Figure 12. Shows the motion profile, i.e., the functional image of Eq. (61) and (62). In fact, swinging the legs and body to move at the same time causes the foot trajectory to not look the same as in Figure 12 (a). Prior to computing the actuator motions, some necessary initial parameters had to be provided, as shown in Table 2. Other geometrical parameters are shown in Table 1.
By substituting Eqs. (61) and (62) and their first-order derivatives and second-order derivatives into the kinematic model derived in section 3, we obtained the displacement, velocity and acceleration for every leg's linear actuator. Figure 13 shows the results for leg 1 of an entire gait cycle. Leg 1 firstly functions as a swinging leg, while in the following half-cycle turns into a supporting leg. Besides the application of this result within trajectory control, the results shown in Figure 13 are also useful for choosing the motor's rotational speed and power.
The offline gait motion planning is able to verify the correctness of the kinematic model of the robot. The control computer of the PH-Robot is an embedded CX2030 Beckhoff controller that can read the offline motion planning lists computed by Matlab. Here, only the lists of displacements and velocities are required by the controller. Since the servo cycle is 1ms, the discrete period of inverse kinematic calculation is equal to the servo cycle. According to the offline gait planning, the walking experiment was implemented successfully. Figure 14 shows the trajectory of leg 1 in the swing phase. The result is very similar to the profile shown in Figure 12 (a). Therefore, the experiment illustrates the reliability of the proposed method and the correctness of the kinematic model of the PH-Robot.

The motion of actuators of leg 1 in a gait cycle

Photograph of trajectory tracking experiment
A novel, six-legged robot with parallel leg mechanisms is proposed in this paper. The kinematic analysis verified that the legs of the robot have ILM characteristics that hold advantages for both the robot's legs and arms. A detailed and complete kinematic model of the robot was provided. An extended approach based on a hierarchical modelling approach was presented for solving complex kinematic problems, utilizing some passive joints variables that led to an explicit expression for the mapping matrices of velocities and accelerations. Based on the Jacobian matrix, two global performance indices, i.e., GDI and GPI were proposed for optimizing geometrical parameters. The computed results for the performance indices indicated that the PH-Robot with parallel leg mechanism had better performance than a robot with a serial leg mechanism in terms of motion accuracy and payload capacity. The workspace analysis verified the transformability from leg posture into arm posture of the parallel mechanism. The shared workspace of two neighbouring legs was analysed for dual arm coordination work.
The developed kinematic model has been implemented and demonstrated by walking experiments. In the future, the dynamics of the robot and control system should be studied systematically.
Footnotes
Acknowledgements
This work was supported by the National Basic Research Program of China (Grant No. 2013CB035504). and the National Natural Science Foundation of China (Grant No. 51405515).
Appendix A
Detailed expressions for some equations: