
Abstract
It is a global challenge in the textile and apparel industry to grasp and separate fabric pieces automatically using mechanical devices. This paper summarized studies on grasping a textile cutting piece by different principles and mechanical systems, and focused on bionic soft fingers made of silica gel. In the study, we first tested single-point grasping to explore the factors that influence the grasping effects of soft fingers, and found that (a) the grasping margin is a crucial factor that influences the effect of grasping, (b) the sides and the directions of a piece play important roles in grasping, and a reverse side and a vertical direction often bring better results of grasping, and (c) although the opening distance of a soft finger is significant to the result of grasping, successful grasping is a joint result of the grasping margin and the opening distance. We then experimented with the arrangement of soft fingers, and discovered that (a) the shape and the area of a cut piece are the determinants for the number of soft fingers that have to be used, (b) a soft finger is needed at the intersections of a piece to guarantee unfolded grasping and transferring, and (c) the number of soft fingers to be used for a specific grasping task can be estimated after major factors are determined. The conclusion we proposed is easy to understand and is convenient for training or application in an industrial production. In the future, it is expected to be applied to the intelligent production of clothing.
The separation of garment cut pieces ply-by-ply from a cutting pile in the mass production of clothing mainly depends on a manual operation. However, the development of the apparel industry demands an advanced stage to offset the rising cost of labor and materials. Therefore, technologies that can simulate manual operations with mechanical systems are becoming a new hotspot of research in apparel manufacturing. Aiming at separating a piece from a cutting pile ply-by-ply automatically, researches have been done using different principles in the past decades. For real application in production of clothing, due to the flexibility and deformability of textile materials, it needs not only a high reliability of a single-point grasping, but also the lowest deformation of the pieces after being grasped and moved. Therefore, it is crucial to explore a separation solution that can catch and transfer a piece unfolded. Aiming at the automatic grasping and transporting system of garment pieces, studies have been carried out by different researchers. The principles or conceptions of the studies have evolved from the original blind separation and then single-point separation to now multi-point cooperative separation.
Porat et al., 1 Guichard, 2 Richard and George, 3 and Shihe 4 proposed a simple crochet grab system with hook needles to grasp cut pieces in 1970s and 1980s. The system is mainly composed of four parts: the manipulator, the picker, the receiving board, and the worktable. The picker is an execution device that is full of hook-pins, like Velcro, to pick up a piece of fabric. The hook-pin needles are installed at the bottom of the picker, and the length of the needles is generally adjustable. The receiving board is a metal plate, like a spade, which will appear since the top ply of fabric piece is hooked away from the cutting pile to receive and then transfer away the piece. The mechanical arm can lift the picker up and down, and thus pick up or separate a piece from the cutting pile. The worktable is usually designed as a lifting platform to lift the cutting pile gradually to guarantee the picker can catch the top piece. The structure of the system and its operating process are shown in Figures 1 and 2, respectively.
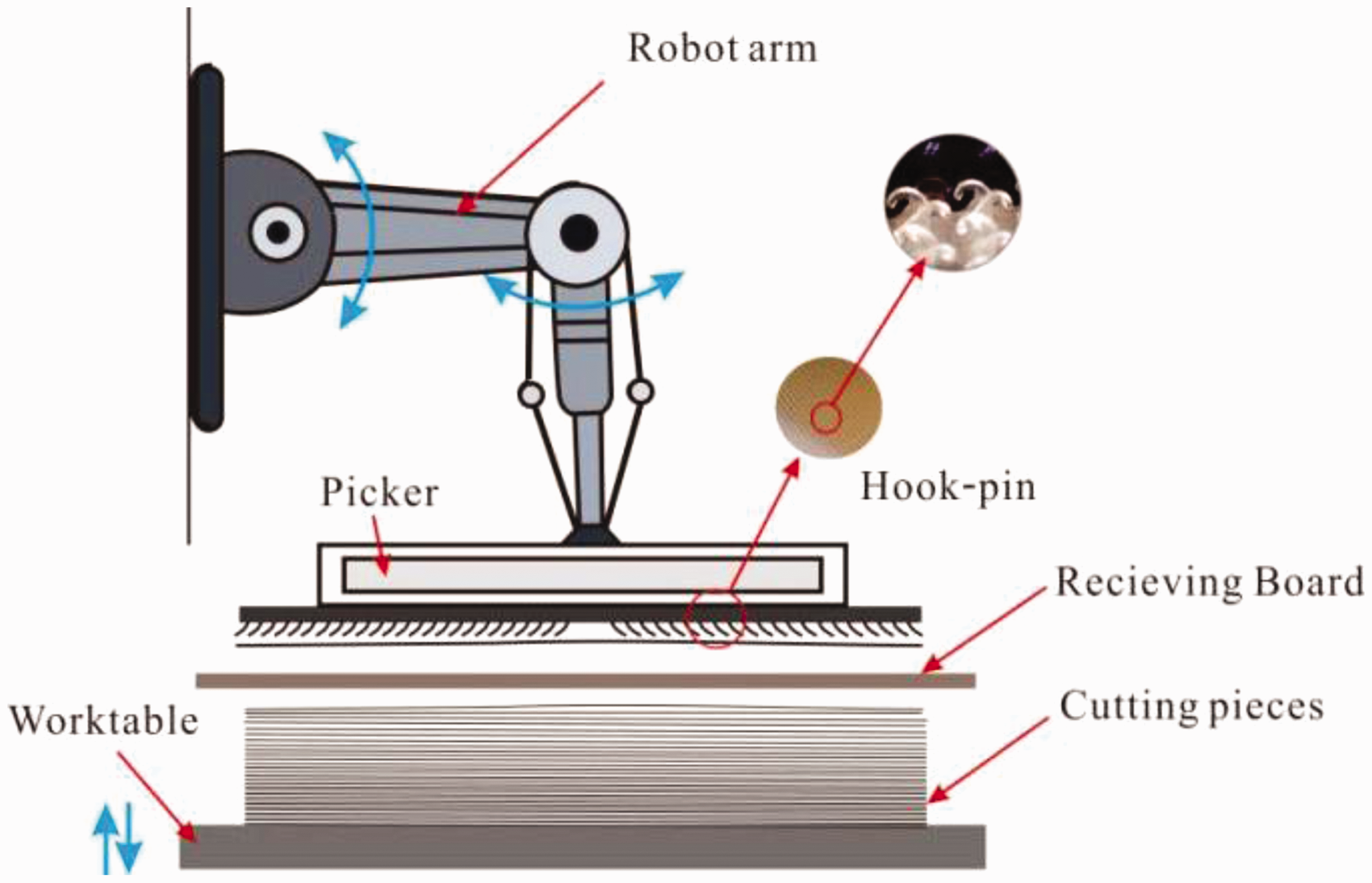
Diagram of the structure of the blind separation system.
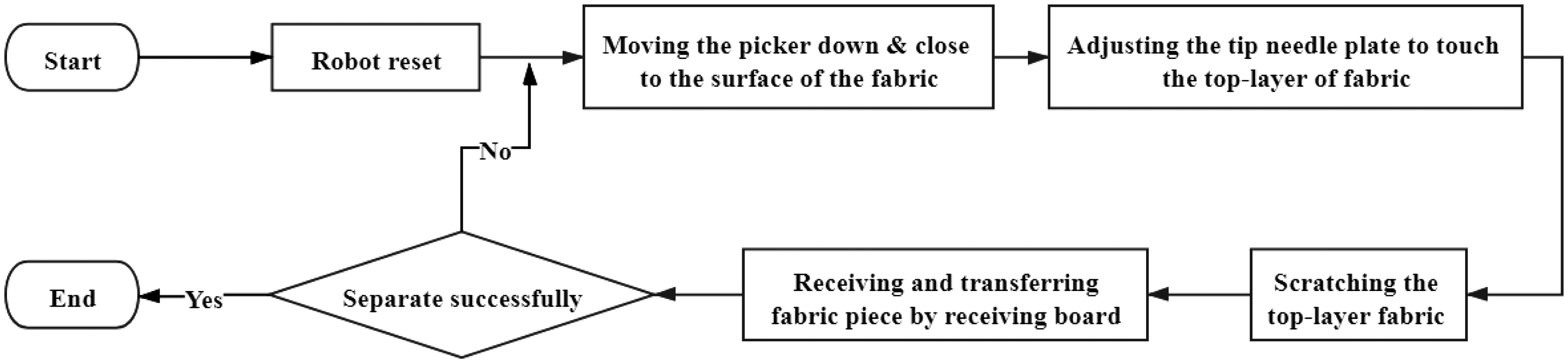
Working principle of the crochet grab system.
This kind of grasping method can separate a textile cut piece by and large, but the accuracy and reliability are discrepant according to the surface performance of a fabric. It is effective for plush fabrics, looped fabrics, and some sparse knits that have enough hairiness for the hooks to catch. However, it seems to be incapable of grasping smooth or compact fabrics. Further, there is a self-contradictory problem for this kind of system, which is that a fabric full of hairiness is easy to grasp, but is also rather difficult to release from the claps of the picker. It is likely to lead to unexpected damage to the fabric, such as a slight snagging or a serious broken hole. Therefore, we categorize this kind of grasping as a blind grasping method, for which we cannot provide an exact expectable force.
There is a method using adsorption to deal with the issue of automatic separation of fabric pieces. There are some representative studies on the adsorption idea using different physical approaches. Kolluru and Valavanis KP 5 designed a sucker device by the principle of air pressure adsorption, Taylor 6 invented an electrostatic grab head using the electrostatic adsorption principle, Seliger and Szimmatb 7 created a re-frozen grab head based on the principle that liquid water becomes solid ice at low temperatures, and that can adjoin the things interacting, and Monkma and Shimmin 8 constructed a polyurethane clamp using the force of viscosity of polyurethane. Although these grasping methods, devices, or systems work in a basically effective way, each research area appears to have obvious deficiencies, for example, the negative pressure of air is usually difficult to control precisely, the force of electrostatic is generally weak and is easily influenced by erratic environmental conditions, and the frozen or sticky methods will inevitably bring some unexpected problems in the next procedure or wrinkle the fabrics accidently. In addition, the researches merely focus on grasping a textile fabric instead of thinking integrally of grasping and moving a cut piece unfolded to combine with a consequent manufacturing procedure, such as sewing a patch pocket onto a cloth by a template machine. Therefore, we generalize these grasping modes as the single-point grasping type and draw its research route as shown in Figure 3.
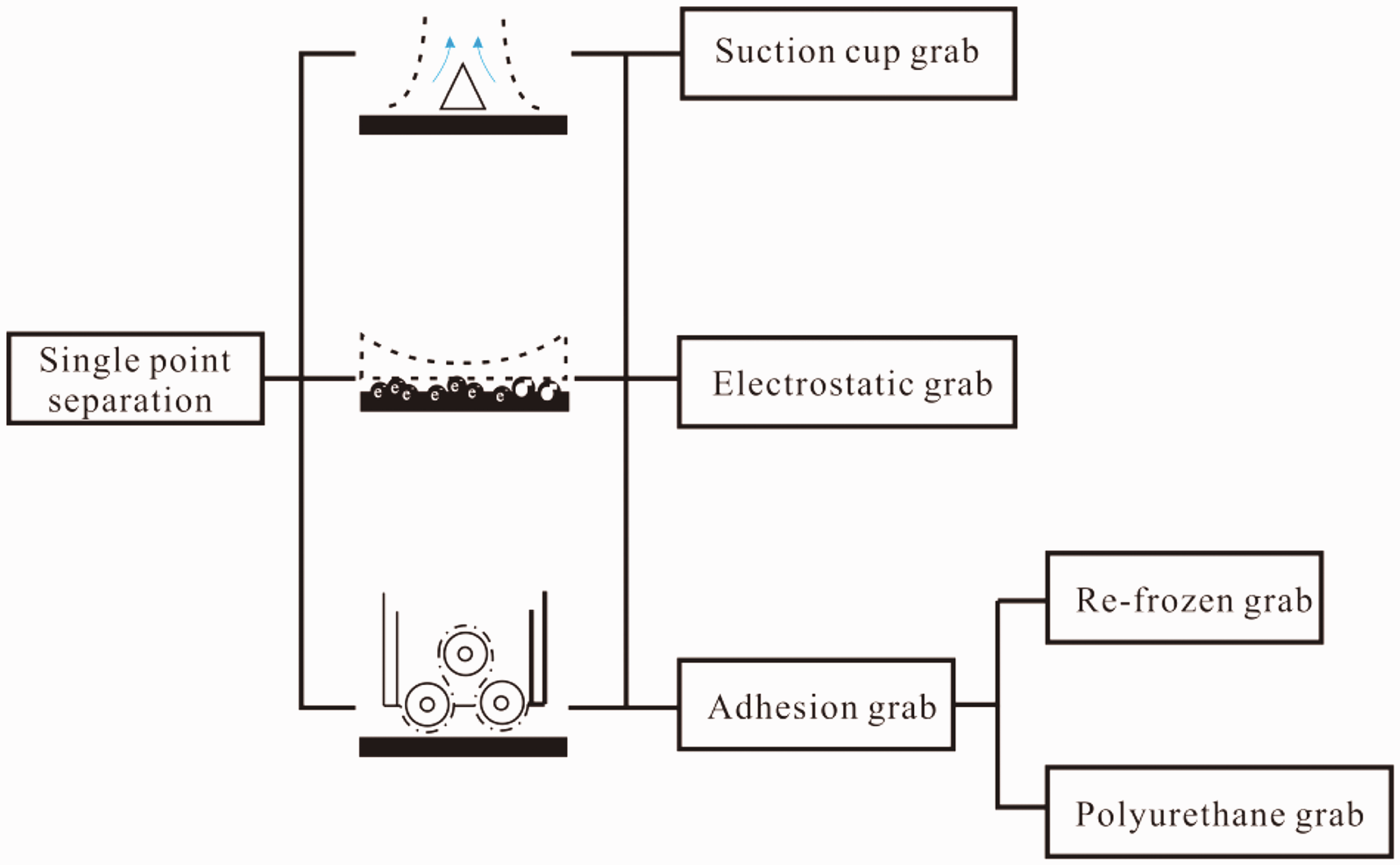
Working principle of the single-point separation system.
It has been proved that the effect of single-point grasping is better than that of the blind method, which is more reliable and can reduce possible problems to the cutting pieces or consequent processes. However, some difficult problems still hinder the application of the devices or systems of single-point grasping, for example, for a heavy piece, it may need a few grasping points to work synchronously, which means that more heads are needed to provide more adhesive forces; however the volume of the re-frozen and sticky head is so large that the area of the piece may be too small to accommodate two or more grasping heads. Meanwhile, the air permeability and the property of non-static electricity for some fabrics made of natural fibers are not applicable to use the principle of electrostatic adherence. Besides the issue of the force of grasping, there is another problem in that single-point grasping will inevitably wrinkle a piece into a mass, and it will become extremely difficult to recognize, re-judge and re-control the piece to fulfill the subsequent operation.
Hence, solutions with multiple grasping points must be explored, which should not only provide enough grasping forces, but also can cover the area of the piece at the correct positions to keep the piece unfolded for moving from one place to another. Cubbic et al. 9 designed a vacuum grab sucker, and the relationship between the suction position and the adsorption effect was tested. The position of the sucker was found to be significant to the separation effect under the same suction force. When the suckers were arranged at the edge of the fabric, the separation effect was the best, which showed that the grasping position has a great influence on the grasping effect.
Ragunathan and Karunamoorthy 10 developed a reconfigurable sucker based on the Bernoulli principle (Figure 4). The design consists of four crossbeam-shaped frames, each one with a gripper, which can slide along the path of the crossbeam frame. The suckers’ position can be changed to fit different shapes of cutting pieces. In 2016, Hui and Jing 11 invented a flexible grasping mechanism for auto-packing socks, which consists of a series of clips, and each clip is made by two spring plates that can grasp socks with different thicknesses by adjusting their spaces to produce different clamping forces (Figure 5).
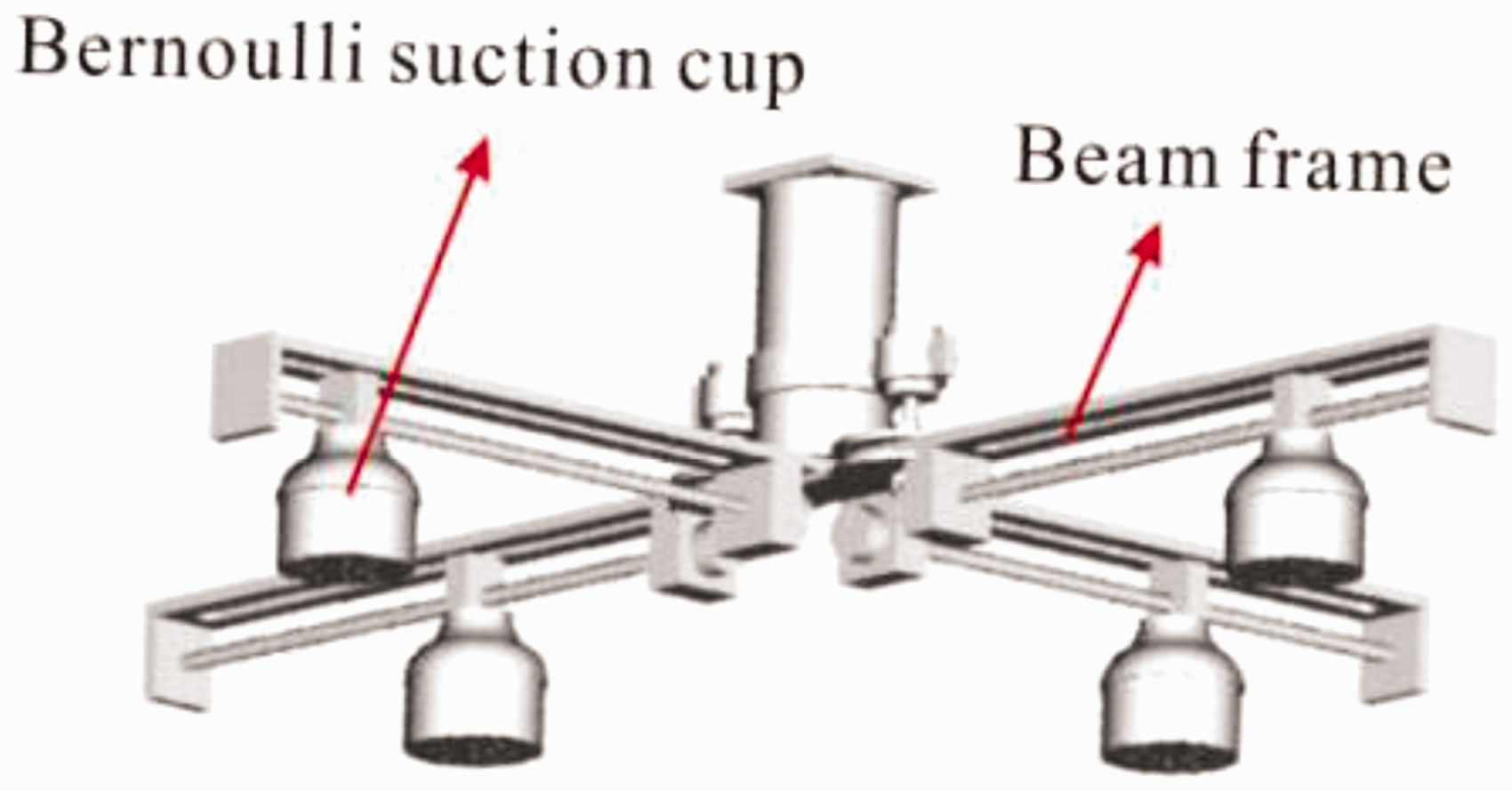
Reconfigurable robot gripper based on pneumatic technology.
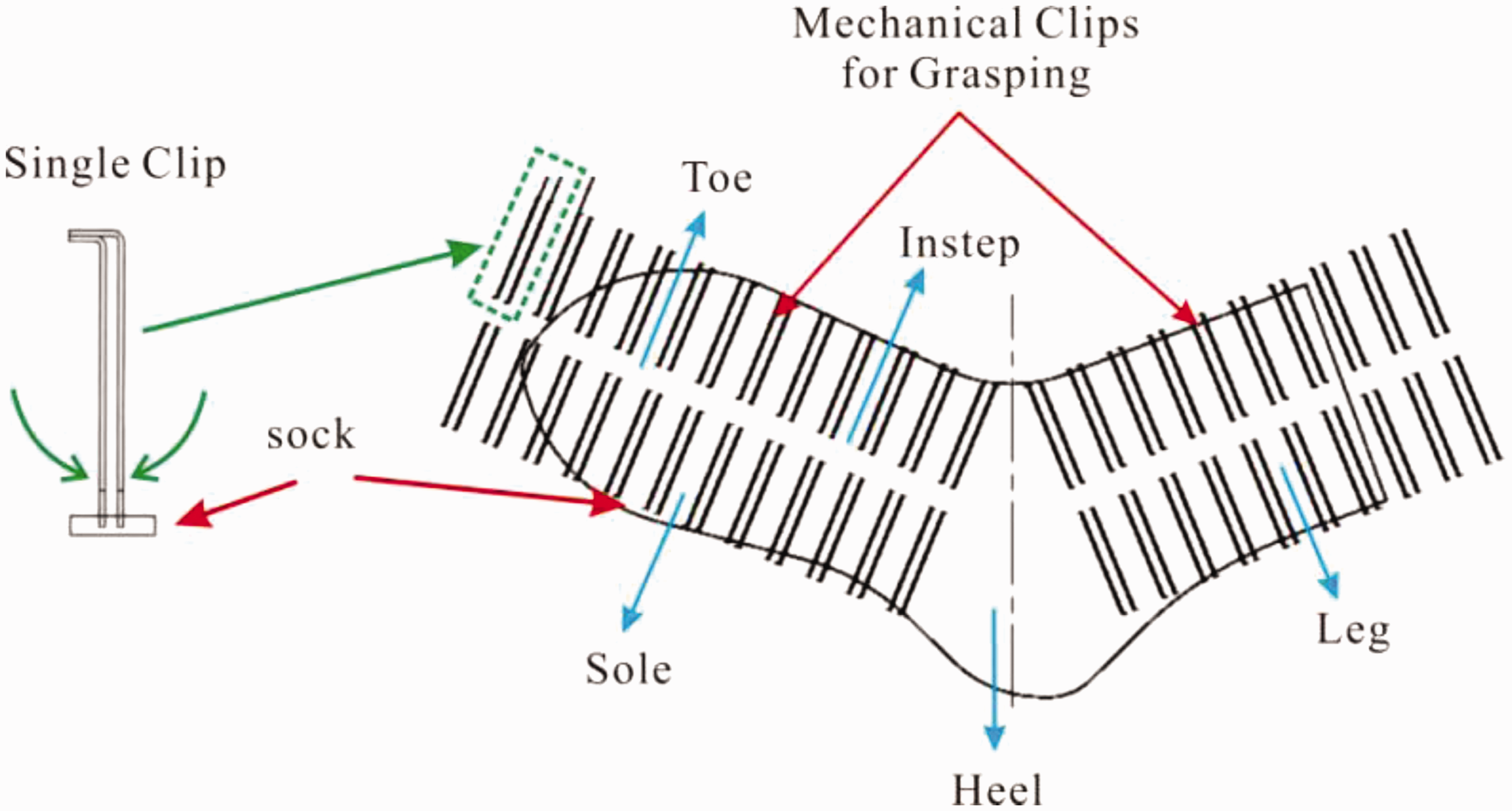
Arrangement of mechanical clips for sock grasping.
In recent years, the rise of soft fingers has provided a new prospective choice to solve the problem of auto-grasping a textile piece.12–14 A soft finger is a kind of soft robot that uses flexible materials such as silica gel to simulate a human hand’s movement.15,16 The bionic soft finger used in this study for fabric grasping is shown in Figure 6. Compared with a rigid gripper, the bionic soft finger has not only a certain rigidity, but also an appropriate deformability and resilience. Moreover, it usually has a “fingerprint” (Figure 7) that imitates the surface of human fingers to improve the success of grasping. In addition, a bionic soft finger is generally small and light (grams only); therefore, it is feasible for many soft fingers to work together cooperatively (Figure 8).

Bionic soft fingers. (a) close/negative pressure. (b) original/pressure free. (c) open/positive pressure.
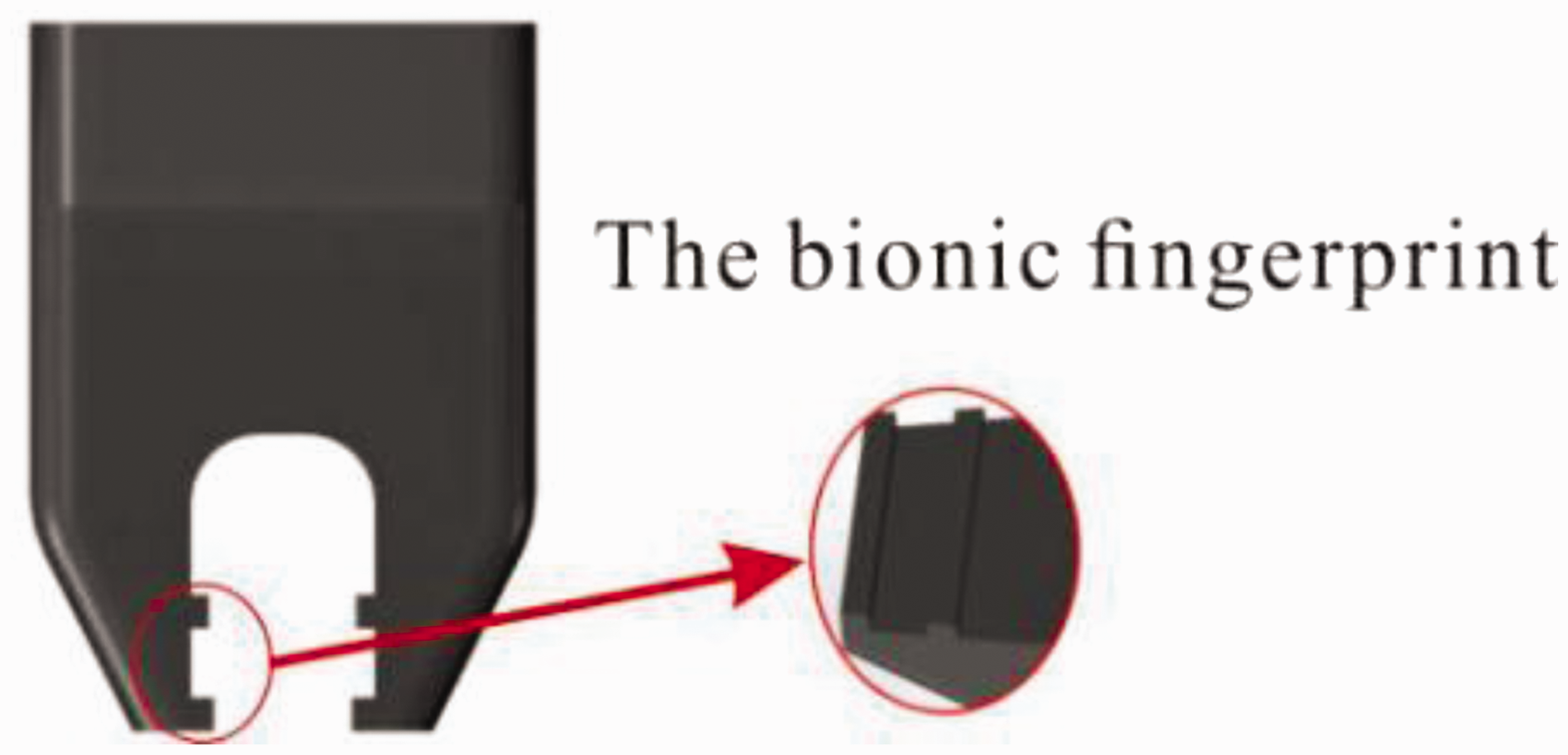
Design of the fingerprint.

Fabric grasping by multiple soft fingers.
Based on a previous experiment on grasping, 17 this study tries to explore the vital factors that influence the success of grasping and transferring a piece unfolded. In particular, the arrangement of soft fingers for different shapes of garment pieces will be investigated. Two experiments will be carried out for single-point grasping and the arrangement of soft fingers. As a final purpose, it is expected to get an optimal collaborative arrangement model for fabric piece separation unfolded from a cutting piece pile.
Single-point grasping experiment
Objects for the experiment
A pile of knitted fabric pieces made of cotton is used in the experiment, which are sleeve pieces for a hooded sweatshirt. The fabric performance presents as a weight of 272 g/m2 and a thickness of 0.96 mm. Before the experiment, the fabric was left loosely for 24 hours in an environment with a temperature of 22 ± 1°C and a humidity of 65 ± 5% according to the technical requirement of clothing mass production, which helps to reduce the impact of the environment on the grasping effect.
Two kinds of soft finger made of silica produced by Suzhou Rochu Robotics Co. Ltd 18 are used in the experiment. The fingers’ parameters are shown in Table 1. The opening distance refers to the distance between the fingertips.
Parameters of the soft fingers in this study

The experimental system is composed of four parts, the soft fingers, a mechanical arm, a pneumatic driver, and a remote controller, as shown in Figure 9, which operates as follows.
The control of the soft finger. The status of opening or closing of the soft finger can be controlled by the air pressure of a pneumatic driver through a remote controller. The finger closes under a negative pressure (Figure 6(a)) and opens under a positive pressure (Figure 6(c)). The presetting and adjustment of the clamping force of the soft finger. It can be understood easily that a soft finger can provide a clamping force when the fingertips close; the clamping force relates to the negative pressure distinctly. Generally, a greater negative pressure will produce a larger clamping force for grasping, and a larger positive pressure will cause a wider opening distance for a soft finger. One of the purposes of this study is to explore the relationship between the parameters of a fabric and that of a soft finger; therefore, the negative pressure is configured at –70 kPa during the experiment, which gives the soft finger a certain clamping force (at around 0.014 N) that can reduce possible interference by an unstable variable. The experiment showed that the greater the positive pressure setting value of the soft finger, the easier it is to pick up the pieces. However, it is better to control the negative pressure at around –70 kPa, because higher air pressure will shorten the lifespan of the soft finger due to the fatigue of materials. The execution of separation and transferring. The whole system of grasping is like a loading and unloading robot. For soft fingers, they play a role in grasping fabric pieces by closing the fingertips through making a negative pressure in the trachea with the pneumatic driver. For the mechanical arm, it operates through a five-axis manipulator by lifting and transferring the pieces held by the soft fingers from the cutting pile to another place.
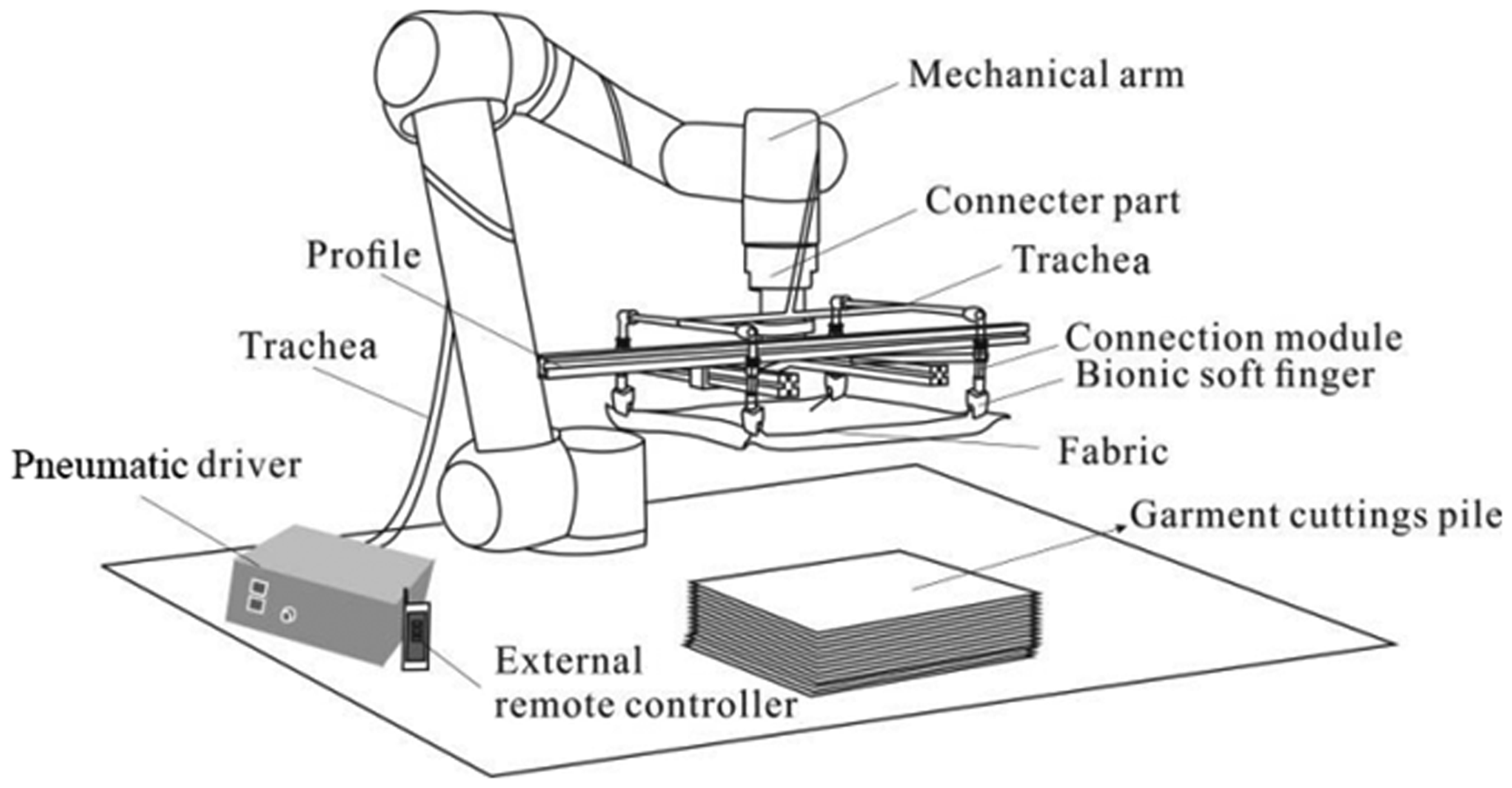
Diagram of the grasping system.
Furthermore, the connection module consists of a slide mounting plate with different shape and length, the profile, which is composed of different lengths, and the nuts, which can change the position of the soft fingers to provide different combinations for functions. Thus, through the combination of the connection components, various arrangements of soft fingers can be provided (Figure 10).
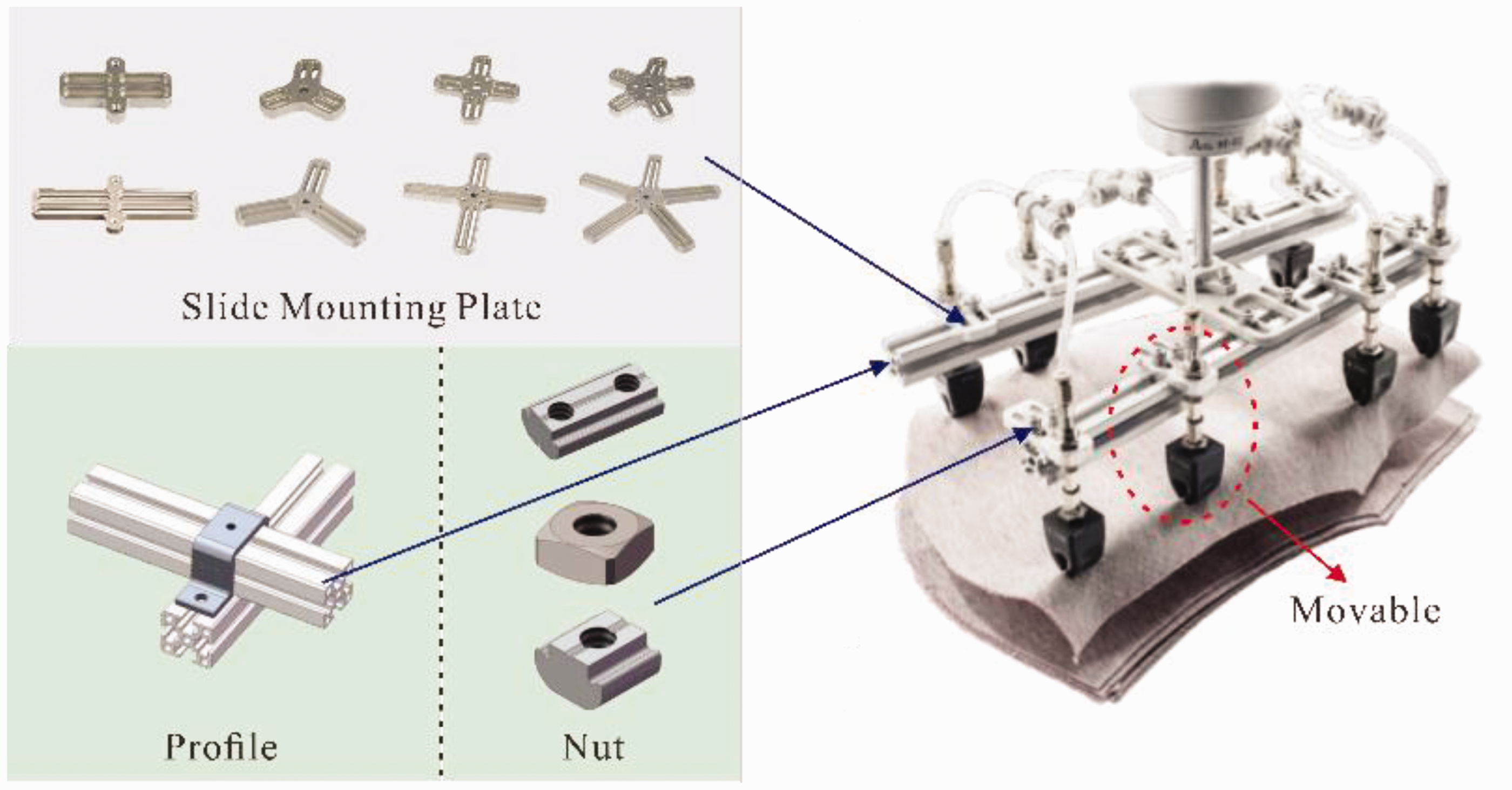
The movable soft fingers.
Experimental program
Fabric marking
According to the process of spreading during apparel production, a spread often consists of multiple plies. Fabric may be spread face up, face down, or face-to-face. This means that the soft fingers must deal with the situation of face up (the obverse side) and face down (the reverse side) fabric.
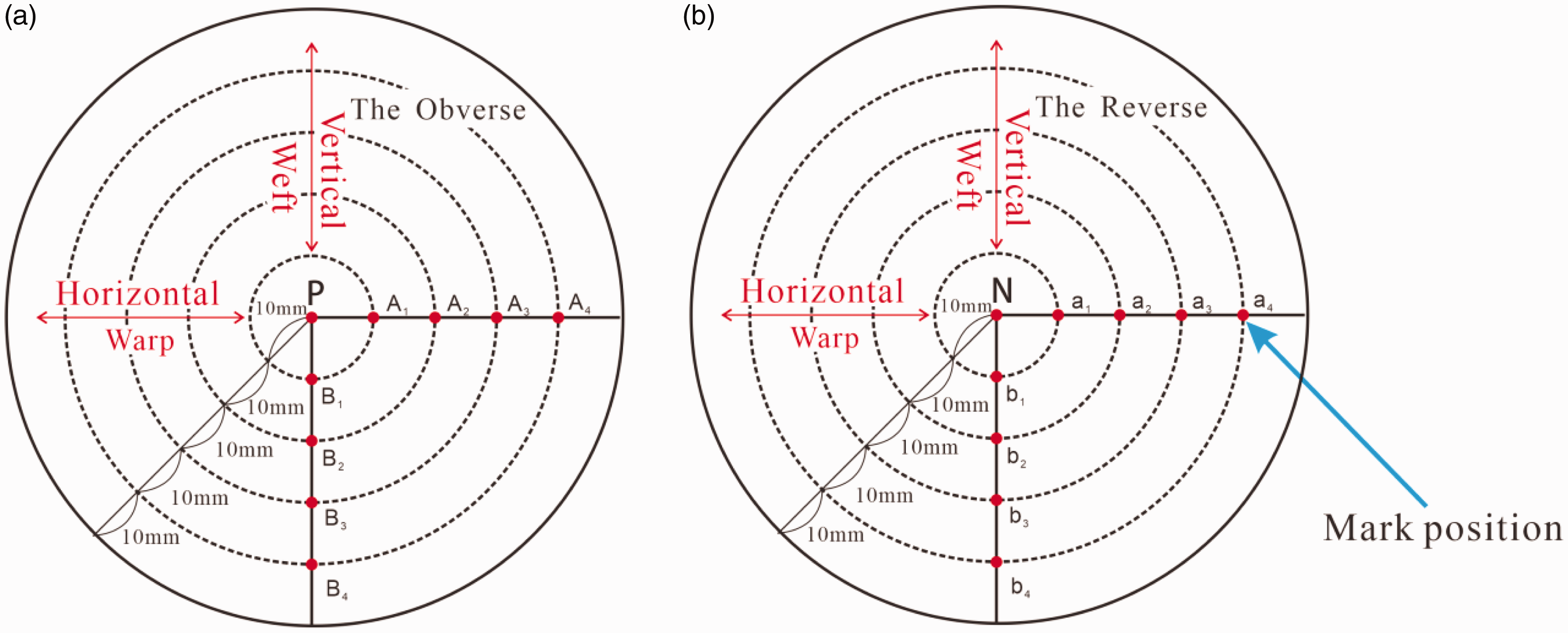
It is found in the experiment that the friction coefficient is different on the obverse side and the reverse side for any fabrics. Meanwhile, it is also different in the horizontal direction and the vertical direction for knitted fabrics as well as in the warp direction and weft direction for woven fabric. In addition, it is obvious that the grab point where a soft finger grasps on the margin of a piece has a distinct influence on the grasping effect. Therefore, this study applied a method called the bidirectional circular marking method to explore the rule of the parameters between the fabric and the soft fingers, as shown in Figure 11.
The radius difference between the two adjacent concentric circles is defined as 10 mm, which is wider than the width of the soft finger of 7.5 mm used in the experiment to avoid possible juxtaposition by two adjacent fingers. Furthermore, according to results of the experiment, the radiated range for a grasping point is no more than 100 mm. Therefore, the fabrics were cut into circular pieces with a diameter of 100 mm, and the center of the obverse side of the piece is marked as P and N for the reverse. Then, points P and N are taken as the center to draw circles with radii of 10, 20, 30, and 40 mm, respectively, on both sides. Next, a horizontal line is drawn along the warp direction as well as a vertical line along the weft direction across the center of the circles on both sides of the cutting piece, respectively. Finally, the A1–A4, B1–B4 points are marked at the cross-points of the horizontal line with the circles on the obverse side of the fabric as shown in Figure 12(a), with the a1–a4, b1–b4 points marked on the reverse side of the fabric by a similar approach, as shown in Figure 12(b). Thus, five round pieces with a diameter of 100 mm from the hooded jersey fabric were prepared for the experiment and they were stacked into a cutting piece pile with the obverse side upward.
Grasping experiment
The experiment was carried out by changing three main variables as follows: (a) the positive pressure to provide different clamping force; (b) the grasping points on each mark position; (c) the types of soft finger to provide different opening distances. The types of soft finger, the various positive pressure, and the corresponding opening distances under a positive pressure are shown in Table 2.
Positive pressure and opening distance of the fingers used in experiment

It is found that (a) a settled negative pressure will provide a constant clamping force, while (b) a changing positive pressure into the cavum of the soft finger will cause different opening distances of the soft finger; meanwhile, (c) a pressure down to the pile will cause the pieces to arch to the extent that is vital for a successful grasping. The relationship between the pressure down to the pile and the arching of a fabric has been studied in a previous article16: the opening distance of the soft finger becomes smaller as that pressure increases. It shows that the greater that pressure is, the easier it is to grasp a piece of fabric. When the pressure increases, the thickness of the fabric becomes thinner and the arch of the fabric becomes larger, which makes it easier to grab with a relatively smaller opening distance. Therefore, the pressure down to the pile in this study was set at around 2 N.
The experiment was run as follows.
The soft fingers GC-BM20008 and GC-BM20006 were used in the study sequentially to grasp the marking points P, A1–A4, and B1–B4 to finish a cycle on the top piece with the obverse side visible under different positive pressures into the cavum of the soft finger, namely 30, 40, 50, 60, and 70 kPa, respectively. The grasping was repeated for the five pieces. When a cycle was finished, the pile was renewed randomly with pieces unfolded and laid aside for 5 minutes until the next cycle started. During each grasping attempt, every marking point would be grasped 10 times under the same positive pressure value, and the grasping effect was scored and recorded according to the assessment method in the Experimental program section, and the mean of the recorded values will be used as the exact value of the point. This was repeated on every marking point. This was repeated for the pieces with the reverse side face up.
Status of grasping and the evaluation method
It is found that the ability to catch a piece keeps pace with the opening distance of the soft finger, where a wider opening distance leads to a better capacity of grasping. There are three critical states during the grasping that need to be evaluated as follows.
State 1 (S1): unable to catch a piece
It appears mainly that an inadequate downward pressure can only scratch a slight arch on the piece, which is unable to be caught or held by the soft finger (Figure 11(a)), although a hold attempt occurred. We estimate the situation as a value at 0 ≤ S1 < 1, where a value close to 0 means a trend to a complete failure to catch a piece while a value close to 1 means a nearly successful grasping. A value of S1 = 0.5 represents the average of a successful picking-up but dropping-off is at around 50%.
Bidirectional circular marking method. (a) the obverse. (b) the reverse.
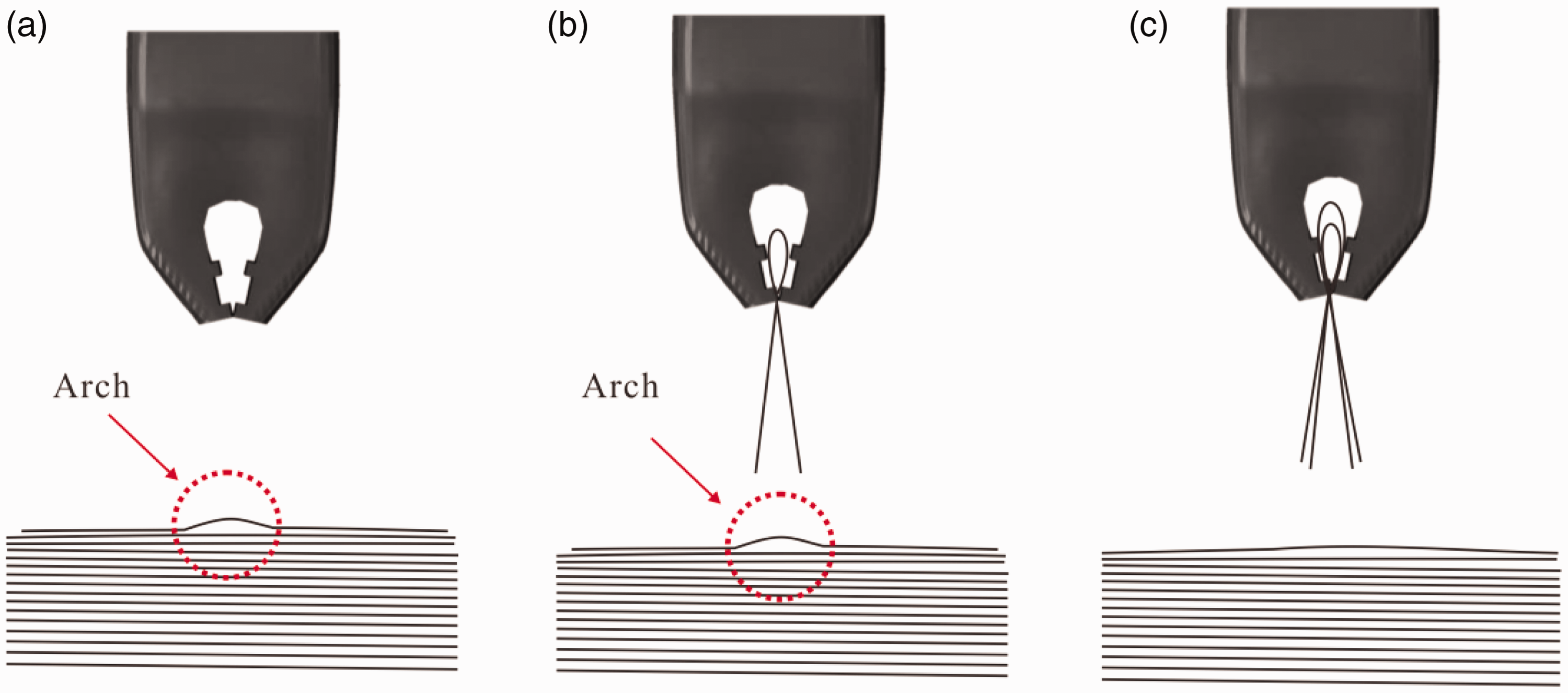
Interface states in the grasping process. (a) unable to catch a piece. (b) just catch a single ply. (c) grasping 2+ plies per time.
State 2 (S2): catch a single ply
This is a desired state in which only one piece is caught tightly and can be lifted or transferred along with the mechanism of the manipulator (Figure 11(b)). We evaluate the situation as a value at 1 ≤ S2 < 2, where a value at this range means a successful single-ply grasping. A successful grasping will inevitably cause an extra arch on the next ply of piece that may lead to catching two plies. The value of 1.5 represents that there is not only a 100% success on single-ply grasping but also sometimes an unexcepted 50% of grasping two plies accidently.
State 3 (S3): grasping two or more plies at a time
This is a situation in which a soft finger can always grasp two or more plies of pieces at each grasping attempt, as shown in Figure 11(c). We assess this situation as S3 = 2 no matter whether two or more plies are grasped.
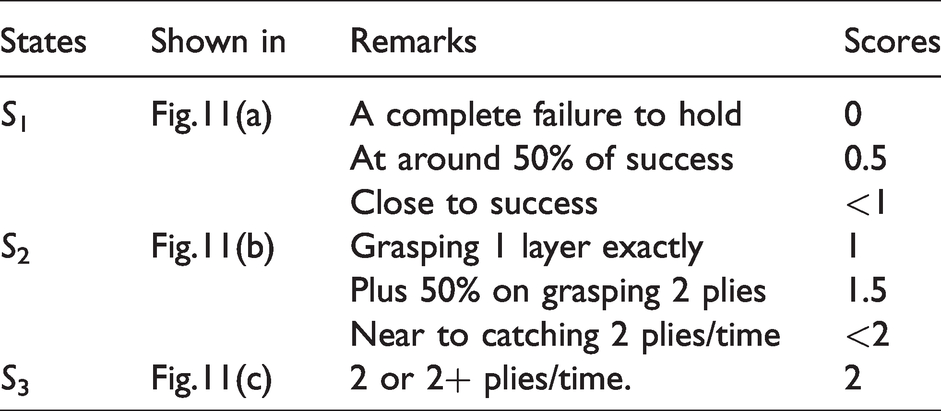
The critical states and the evaluation method are organized in Table 3.
Status and evaluation method for the grasping effect
Analysis and discussion
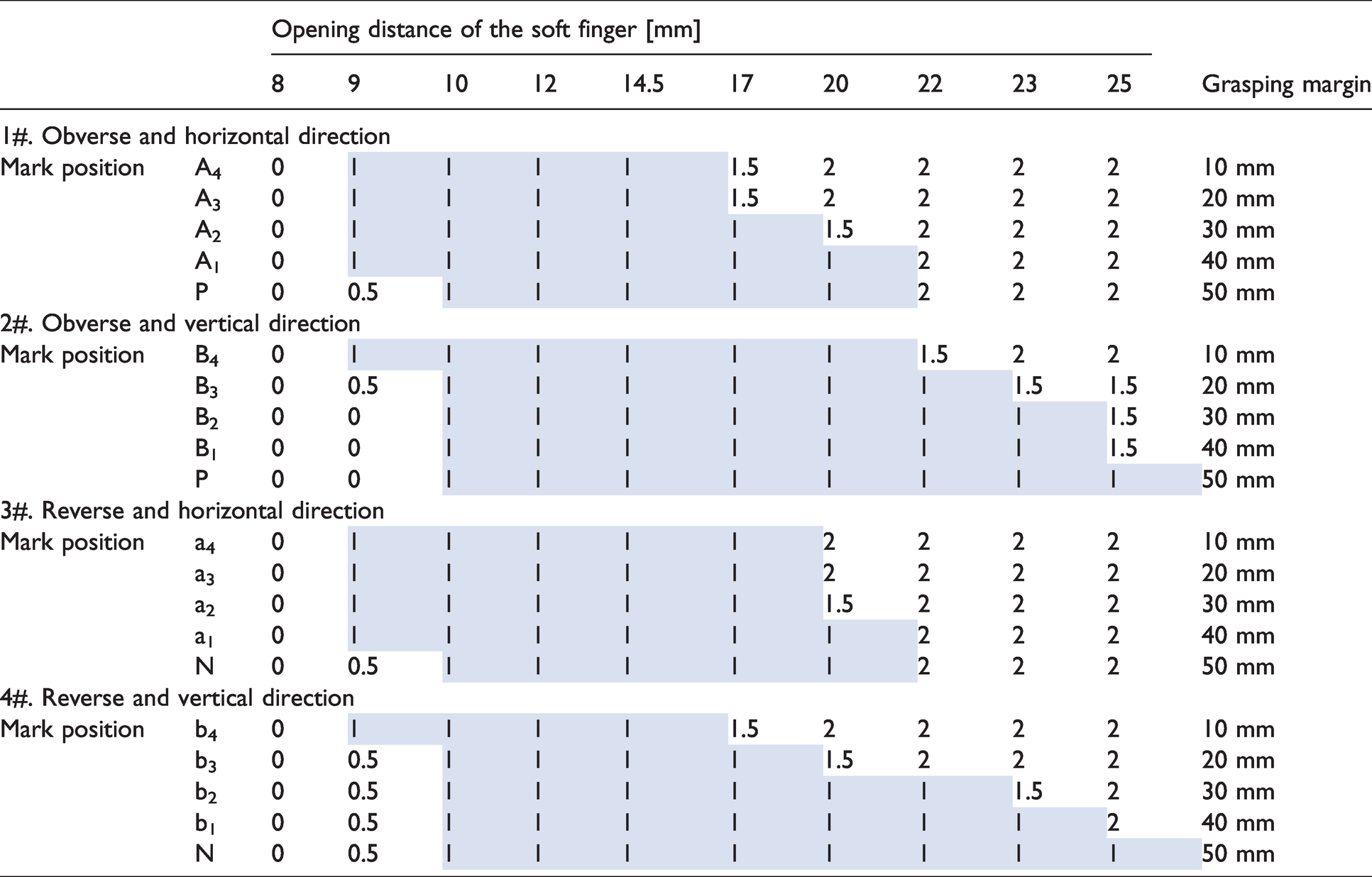
Table 4 records the evaluation scores of the grasping effects of each marking point in the four directions of the fabric with different opening distances of the soft finger. Here, 1# and 2# are the results of the obverse side and horizontal/vertical direction, respectively, and 3# and 4# represent the reverse side and the horizontal/vertical direction, respectively. The values 1 in Table 3 are what are desired, so they are highlighted in colored shading to help find regularities. It can be found from Table 3 that the grasping effect is a comprehensive result of the face and the direction of a fabric, the grasping margin, and the opening distance of the soft finger. The role and its contribution to the effect for each item will be explored in the next study.
Experimental results
Influence factors of the grasping effect
Grasping margin
The grasping margin refers to the shortest distance between the grasping position point and the edge of a cutting piece.
It can be found from Table 4 that when the grasping points gradually change from the edge area to the central area of the cutting piece, the values of evaluation become smaller, which is coincident with the phenomenon that the grasping becomes difficult. For example, for 1# with an opening distance at 20 mm, the grasping capability becomes weaker from two plies to one ply as the grasping point moves from the edge area to the central area of the piece. Therefore, it can be inferred that the grasping margin is one of the factors that influences the effect of grasping.
The reason for this phenomenon lies in the contact area of the top piece and the next one and therefrom the friction force between them. When a soft finger grasps any points in the central area and tries to lift a piece upward, the piece will arch into a horn-like shape, as shown in Figure 13(a). On the one hand, the contact area is almost the whole area of the round piece during the whole process of lifting, and the clamping force must overcome the friction force against the relative slide between the top piece and the next one, which needs a relatively stronger force to execute and leads to an appearance that the piece is more difficult to be lifted from the pile. On the other hand, a fabric usually has gas permeability, more or less and, therefore, a small negative pressure will occur between the space of the top piece and the next one when the horn is formed, the air pressure in the space will become lower than the normal atmosphere outside at being picked up and, thus, the difference of air pressure will push down the top piece onto the next one, which enlarges the friction force furtherly. Therefore, the combination of the whole contact area and negative pressure explores the difficulty of grasping a piece in its central area. Constantly, when a soft finger tries to uncover a piece at its very short edge, the relative slide occurs only between the edge of a piece and the grasping point, as shown in Figure 13(b), which leads to a much lower friction force and needs a much smaller force of clamping to lift a piece. Meanwhile, the influence of negative pressure will not appear during the whole process of lifting for an equal air pressure on both sides of the piece. Thus, a reasonable exploration for the good appearance of grasping by putting a soft finger on the margin area of a piece can be drawn.
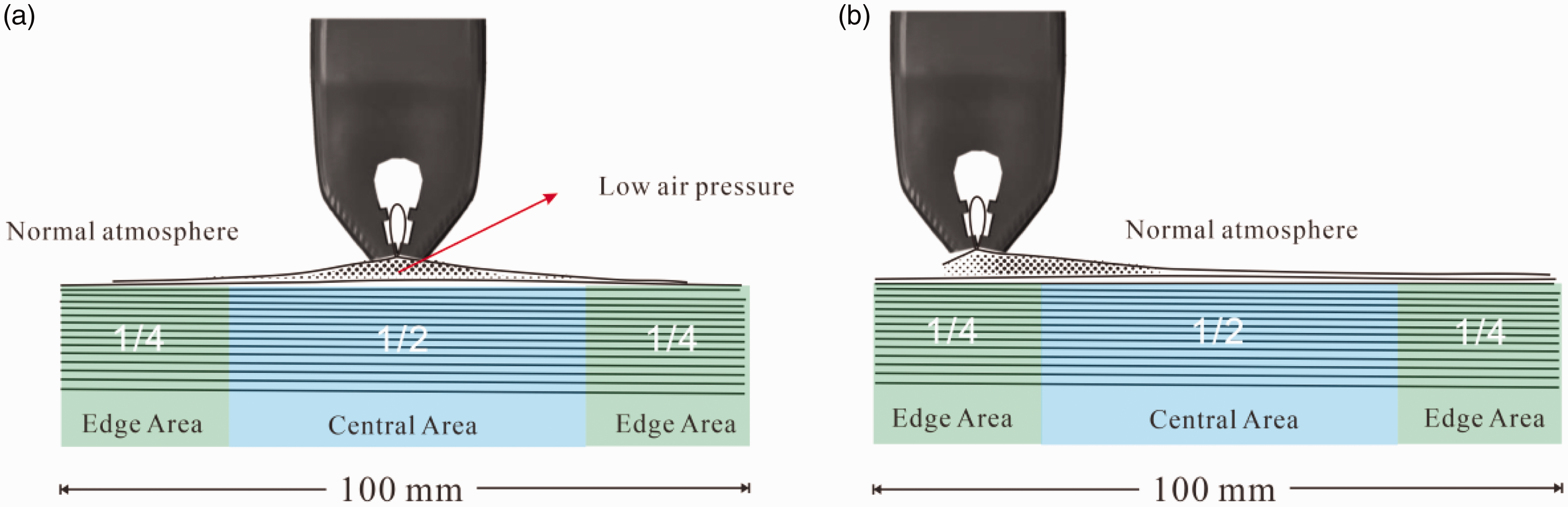
Different air pressure by different grasping positions. (a) grasping central zone. (b) grasping marginal zone.
Fabric direction
The fabric direction in this study refers to the obverse and/or the reverse side of the fabric, the horizontal and/or the vertical direction of knitted fabrics, and the warp and/or the weft direction of woven fabrics.
It can be found from Table 4 that there is a different effect of grasping between the obverse and the reverse side of a piece. By observing the color-filled area with value 1 in Table 4, for 1# and 3# in the horizontal direction with the only difference being the obverse and reverse side, the color filling area of 1# is larger than that of 3#, which indicates that the reverse side of a piece shows an easier trend to be grasped and lifted. However, for 2# and 4# in the vertical direction, the color shading area of 2# is much larger than that of 4#, which means that the obverse side of a piece is apt to be caught and lifted. Similarly, there is also a different grasping effect between the horizontal direction and the vertical direction. For the obverse side of a piece, the total score of 1# with value 1 is 24, while that of 2# is 34, which shows that the vertical direction is better to place a soft finger to get a better grasping ability.
Opening distance of the soft finger
The rules for the opening distance of soft finger are as follows: (a) a successful grasping needs an appropriate opening distance, as a soft finger with too narrow a gap cannot grasp a piece, while one that is too wide may grasp two or more plies; (b) based on the same grasping margin, a wider opening distance presents a higher capacity of grasping; (c) a successful grasping lies in the combination of opening distance and grasping margin for each marked position, which are all important roles for the arrangement of soft fingers.
In summary, the obverse side and vertical direction of a piece have a potential superiority to combine with the soft finger to gain a single-ply grasping and separation with a high success rate. Meanwhile, a successful grasping is the joint result of the grasping margin and opening distance.
It is found in the experiment that the grasping margin and the opening distance of the soft finger play the most important roles for a successful grasping. Therefore, an optimal combination of them should be discussed for the soft finger to provide a perfect capability of grasping, which can give a credible selection range for the user of soft fingers to decide their value correctly and quickly. An example with fabric 1# in Table 4 will be demonstrated in the next study to show the process of building the optimal combinations.
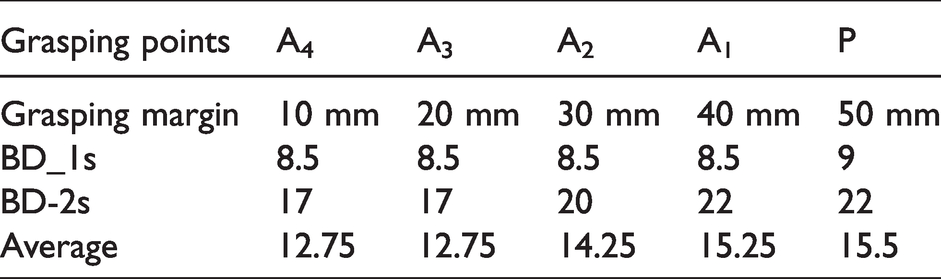
For point A4 on fabric 1# with the direction observe and horizontal, when the opening distance of the soft finger is originally set at 8 mm and the grasping margin at 10 mm, the grasping score is 0, which means a completely failed grasping attempt; however, when the opening distance enlarges to 9 mm, the score becomes 1, which means a successful grasping occurred. Thus, a reasonable inference is that there must be a breakthrough point valued at 0.5 between the 8 and 9 mm opening distance. It is proposed that the larger the opening distance is, the larger the arch area will be that is formed on the top ply, which means that the fabric will be grasp more easily.16 Hence, according to that research conclusion, we indicate the average distance of 8.5 mm as the breakthrough point and name it the “breakthrough distance of a single ply (BD-1).” When the opening distance enlarges to 17 mm, a new appearance occurred such that two plies of a piece begin to be caught sometimes and the score becomes 1.5 correspondingly. Thus, another breakthrough point can be obtained and is named the “breakthrough distance of 2 plies (BD-2).” Hence, two crucial points and a range of average distance are obtained, which means that any combination with an alternative between BD-1 and BD-2 and a grasping margin between 8.5 and 17 mm can definitely grasp a piece, and the most optimization is at around the center of the breakthrough points and the range of averages. Similarly carrying out this process for different combinations of opening distance and grasping margin, a series of crucial points and average points for breakthrough distance are obtained. Finally, three polygonal lines are drawn by connecting the crucial points, the BD-1s and the BD-2s, and the average points, and three areas are also formed, as shown in Figure 14 and Table 5, in which (a) three zones in different colors represent different expectations: the middle zone in green means combinations for a successful grasping; the bottom zone in yellow means an inadequate invalid combination; and the top one in pink means an overfull invalid combination. (b) Alternatives close to the average line signify the most credible combinations.
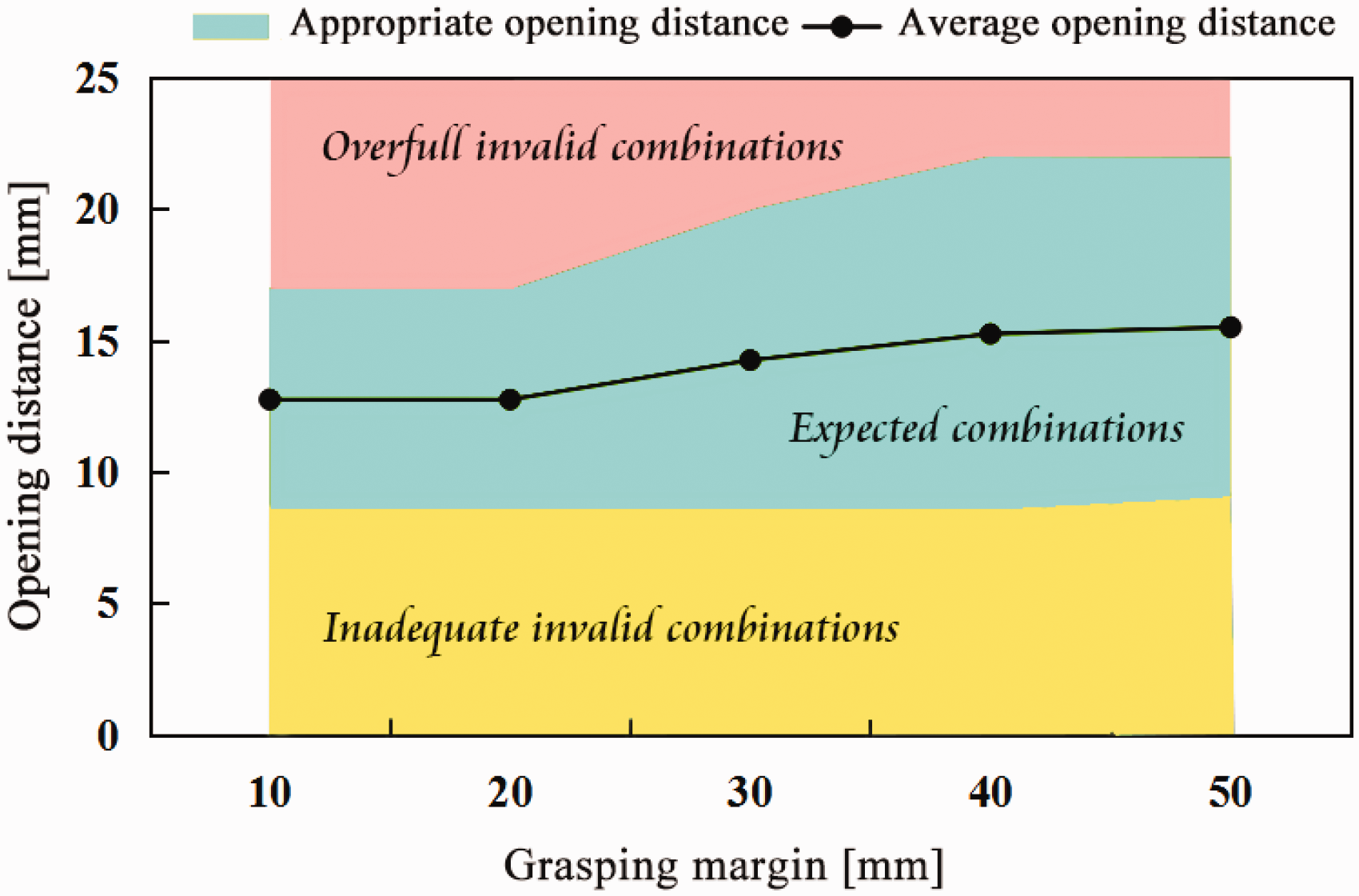
Combinations of opening distance and grasping margin (color online only).
Crucial and average points for each grasping point for fabric 1# in the obverse and horizontal direction
Arrangement of grasping positions
Principle for soft fingers to work cooperatively
It is known that the range driven by a soft finger is limited and the weight of a piece is usually too heavy to lift for a soft finger. Hence, multiple soft fingers should be used in a real solution to share a piece’s weight jointly. However, there is no suitable standard to follow to arrange the soft fingers accordingly. Therefore, an innovative principle for the arrangement of soft fingers to work cooperatively is putt forward in this study as follows.
The grasping margin and opening distance of the soft fingers should be an appropriate combination to guarantee only one ply is grasped at each grasping. The purpose for this is to ensure that each garment is assembled by pieces from the same ply of fabric in the spreading process of garment production. The piece should be grasped unfolded for consequent possible operations, such as counting, ticketing, and grouping, by machines after cutting. It needs not only many soft fingers to work jointly, but also the force of pinching must be strong enough to guarantee that the piece will not drop off from any one of the soft fingers throughout the process of transferring a piece from one place to another by the mechanical arm. The principle to evaluate the efficiency of arrangement of the soft fingers depends on fewer soft fingers representing higher efficiency. An optimal solution should be a way of using as few as possible soft fingers to grasp and move a fabric piece unfolded.
It is found in this study that an arrangement of grasping by the soft fingers mainly depends on four factors, namely the grasping margin, the opening distance of the soft finger, the relative placement of soft fingers against each other, and the number of soft fingers that must be used.
Classification of cutting pieces
The arrangement of soft fingers to grasp a real piece needs to consider the properties of pieces, such as the weight and the shape, as well as the properties of the soft finger, such as the maximum clamping force, the number that has to be used, and their relative position.
It is easy to understand that a piece’s shape signifies the grasping effect obviously. However, there are too many shapes for garment cut pieces in mass production, which could be a rectangle, triangle, oval, or polygon with different areas. Hence, a method should be found that helps to judge the way to place the soft fingers correctly. It is found in this study that the placement of soft fingers, especially whether they are at the intersection angle of a piece, usually decide a success grasping or not. Therefore, this study tries to classify the shape of pieces by edges or intersection angles as follows.
Category I: one-edge or round-like pieces.
This type of pieces has only one edge, such as a round or oval piece, which is a kind of round-like piece without an obvious intersection angle, such as the top button ply of a hat, as shown in Figure 15. It is found that at least three grasping points are required for this kind of piece to ensure it is unfolded, and the fingers should be distributed along the edge averagely as short as possible and the quantity depends on the area or weight of a piece.
2. Category II: bilateral or semicircular-like pieces
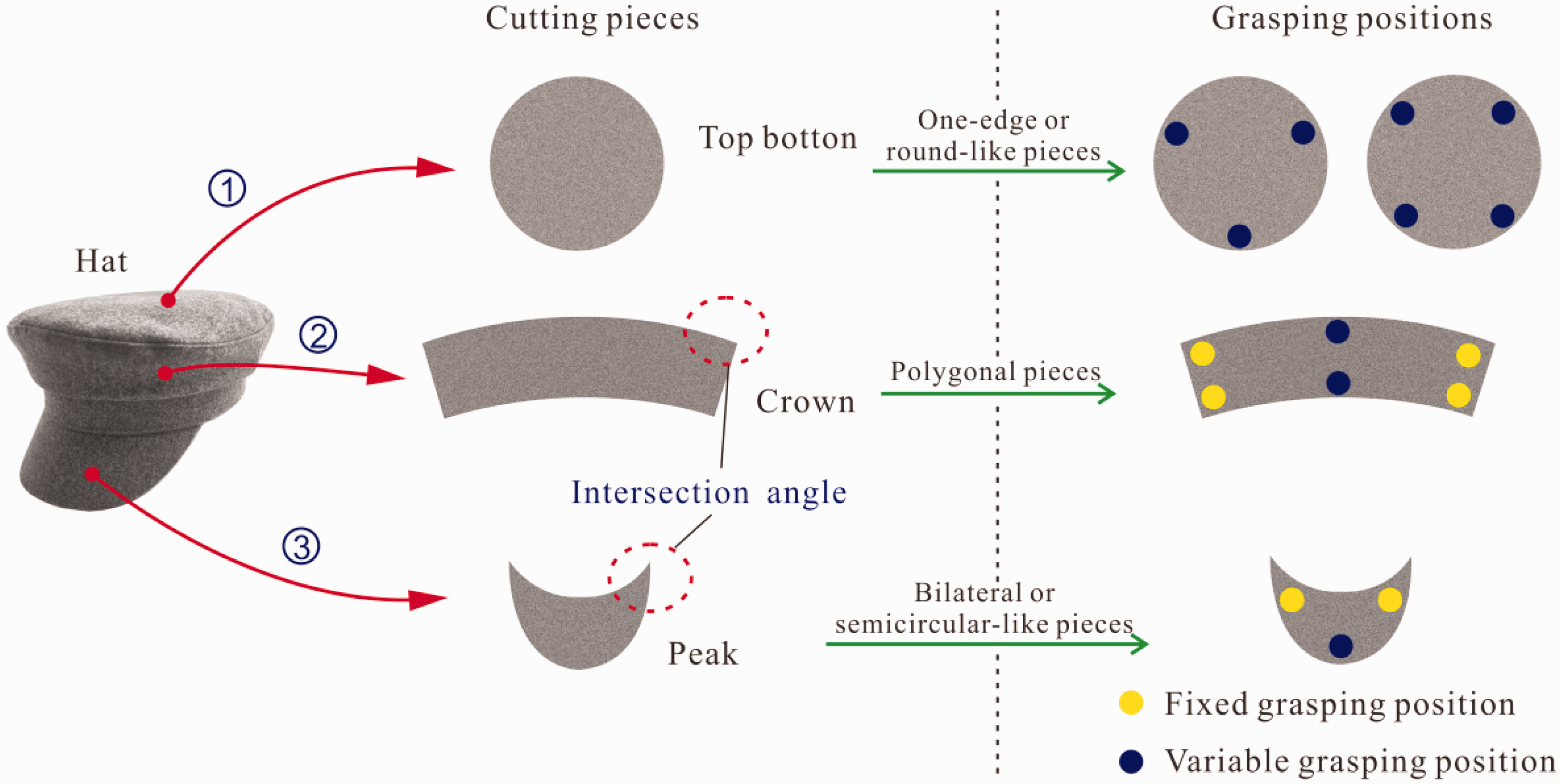
Representative shapes of cutting pieces with a hat as an example.
This kind of piece is characterized as a semicircular-like piece with at least a straight edge and a curved edge that form two intersection angles, such as the peak piece of a hat, as shown in Figure 15. It also needs at least three grasping points to ensure that the piece will not be folded. However, it differs from the round-like pieces in that two fixed grasping points must be placed at each intersection angle, and the last one should be set at an appropriate position, such as the center of the long curve along the edge of the piece.
3. Category III: polygonal pieces
This type of cut piece appears like a polygon with at least three angles intersected by three or more lines or curves, which is the most popular piece in producing apparel such as sleeve pieces, collar pieces, and the crown piece of a hat. As shown in Figure 15 for the crown piece of a hat, it is necessary to place a soft finger at each intersection angle, the middle part depends on its area or weight or crimping, and the minimum that must be used is equal to the number of edges of the piece to keep unfolded. In addition, the remaining soft fingers should be placed at the edge of the piece averagely. The equal placement usually refers to the center of the longest side of the fabric.
Number of soft fingers
In the discussion of the classification of cutting pieces, it can be found that if we let K indicate the number of edges of a piece and R represents the minimum number of soft fingers to grasp a piece unfolded, then a vague rule can be described as

However, it is not enough to have a rough estimate for an application of grasping. Therefore, a force analysis should be done between the weight of a piece and the clamping force a soft finger can offer. This analysis is shown in Figure 16 when a piece is grasped off the cut piece stack and held by a soft finger in a stable situation.
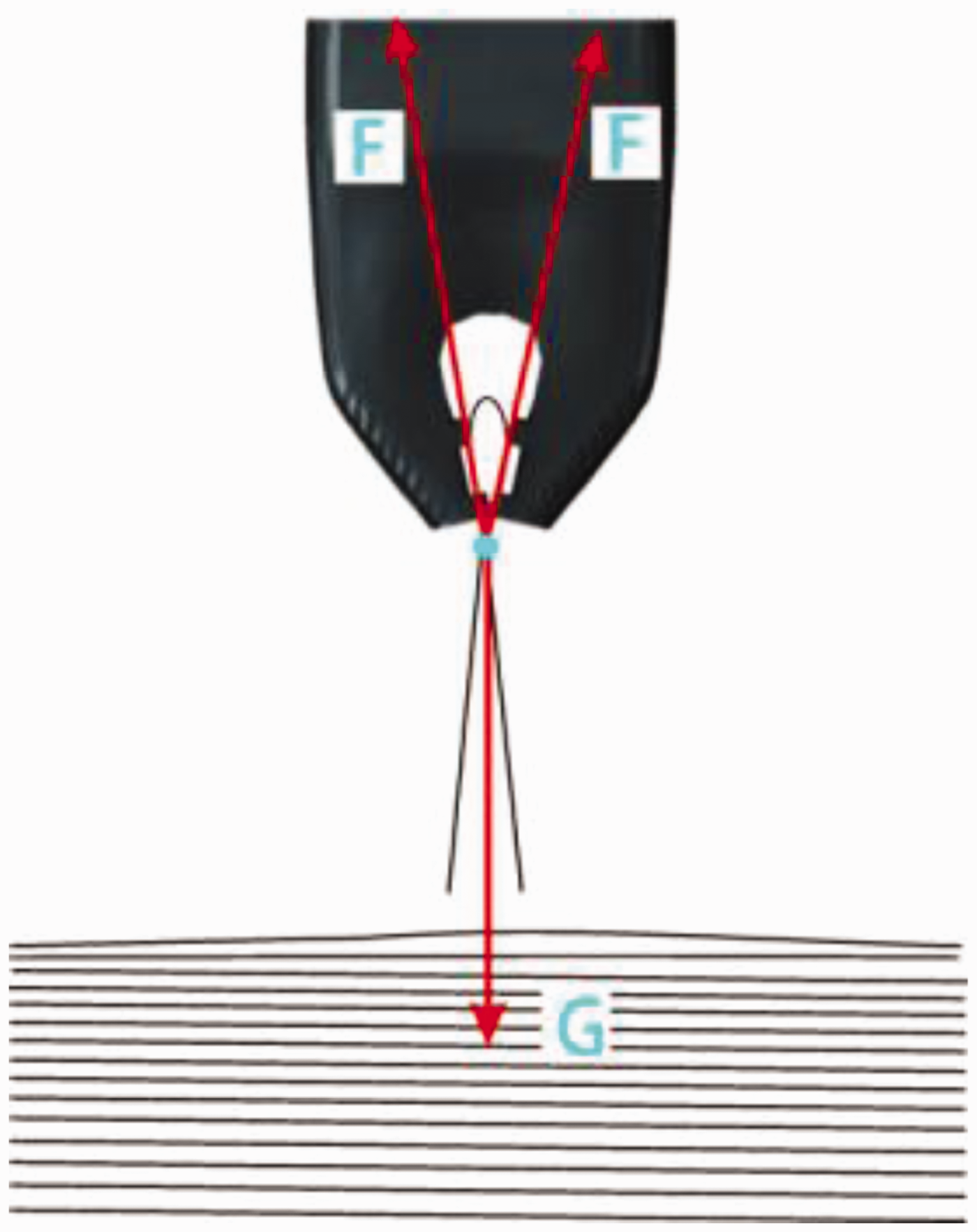
Force analysis between G and F.
Here,
Based on the analysis of F and G, let Q indicate the number of soft fingers that must be used to hold a piece unfolded, then the Q can be described as

According to the friction theory, the static friction force significantly relates to the static friction coefficient μ between a piece and a soft finger and the clamping force T by the soft finger


Combining Equations (1)–(3), a formula for Q is integrated as

Let
To sum up, a flow chart is drawn in Figure 17 to judge situations or to determine the number of soft fingers that need to be used for a certain shape of piece.
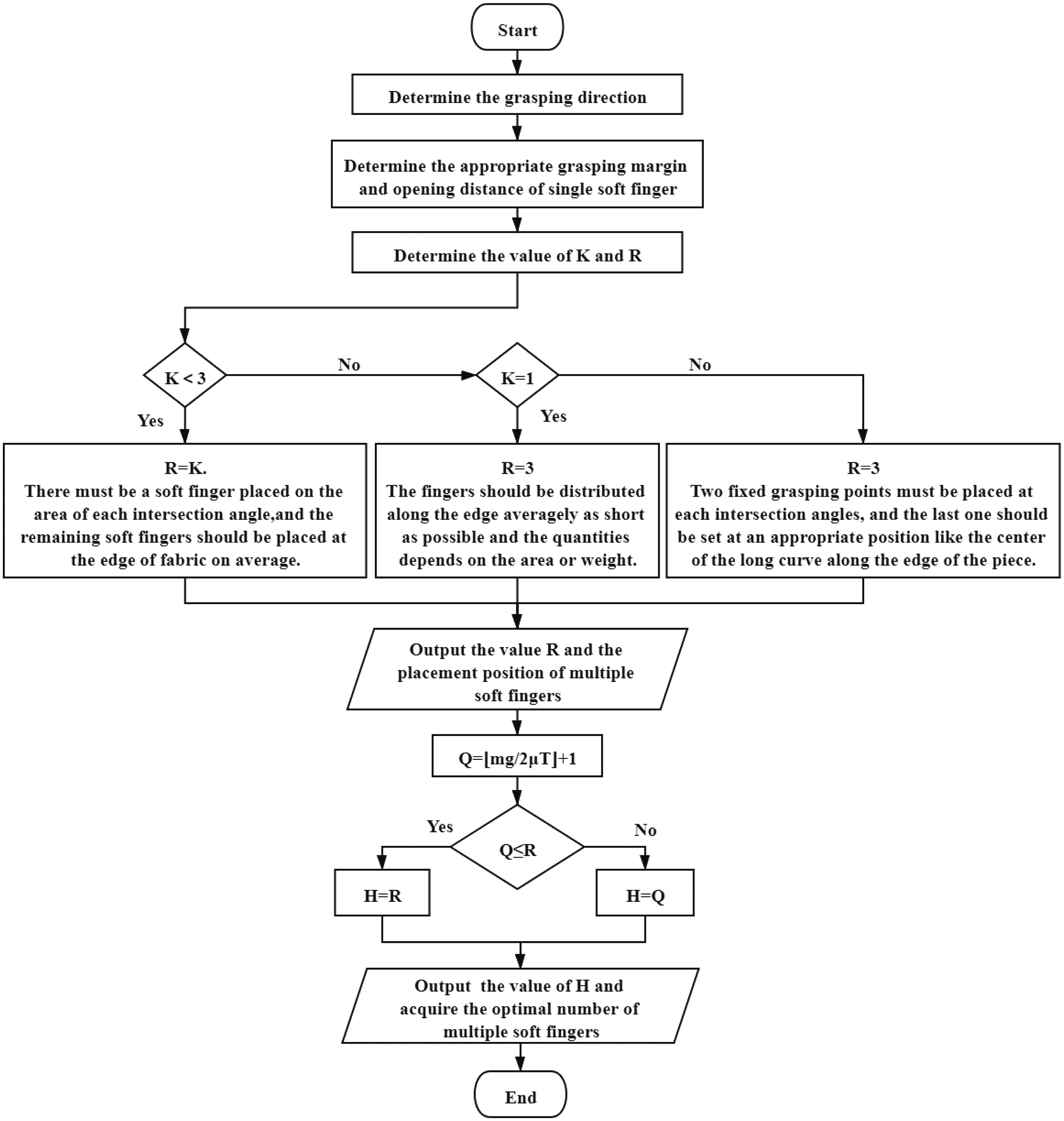
Flow chart to judge the number of soft fingers that should be used.
Verification
A test was carried out to verify the arrangement model proposed in this study. Four kinds of typical pieces from different garment cutting patterns were used and marked as No.1–4, respectively, as shown in Figure 18. The relevant parameters and grasping information are shown in Table 6. Nonwoven fabric used in the process of garment production is relatively rare, so we choose only knitted and woven fabrics to carry out the grasping experiment.
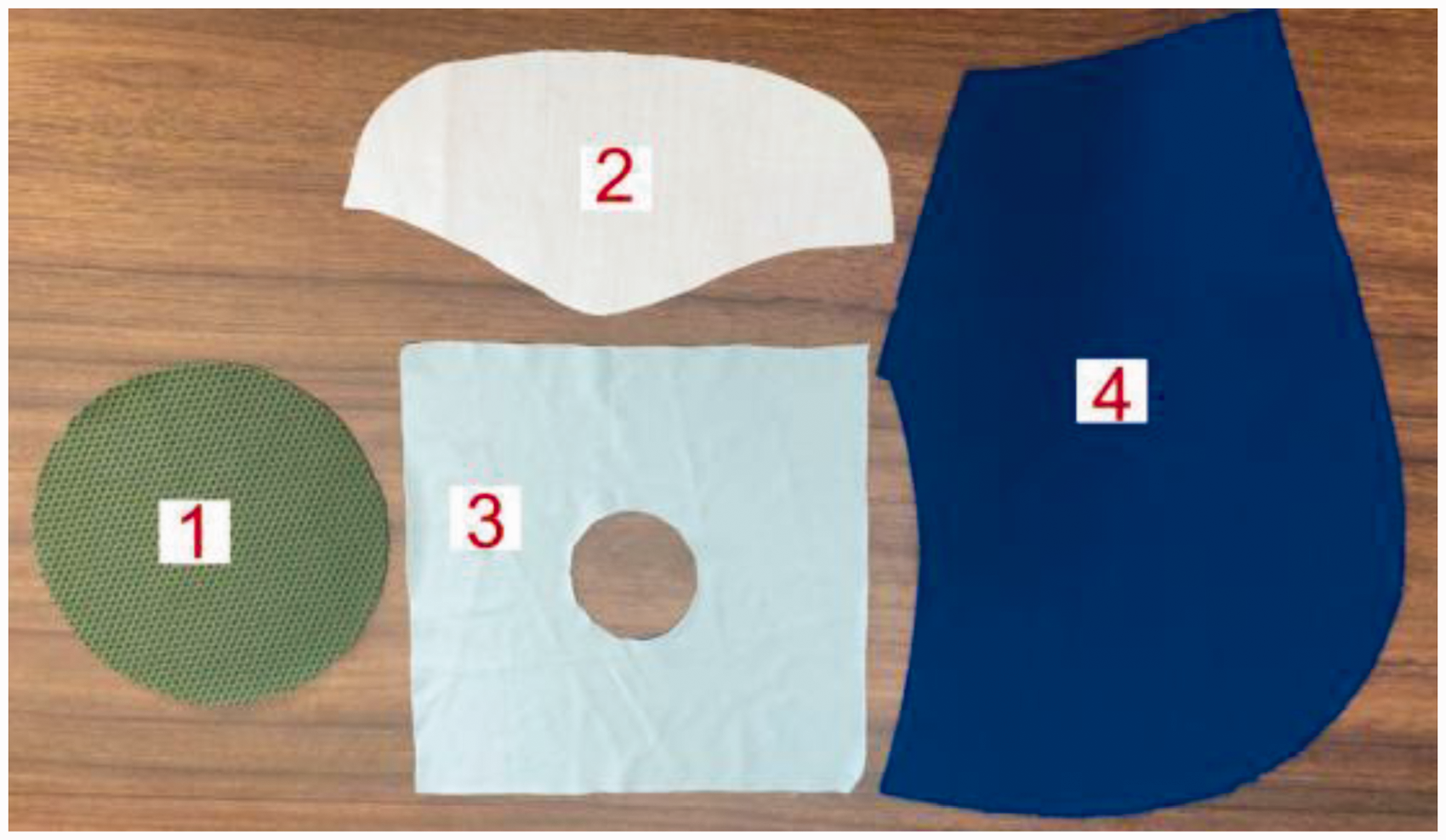
Four kinds of typical cutting pieces.
Parameters and information of the pieces for testing

ISO 8295-1986
19
and FZ/T 01054-2012
20
are the national standards used in this study to test the friction coefficient, and a TC-MXD-01 friction coefficient tester is used to get the static friction coefficient
Arrangement of four kinds of cutting pieces

From Table 7, the shapes of the four cutting pieces are one-edge, bilateral, polygon, and polygon, respectively, and their corresponding number of edges is one, two, four, and four. So, K1 = 1, K2 = 2, K3 = 4, and K4 = 4. According to the arrangement scheme, when K<3, then R = 3, while if K ≥ 3 then R = K, so the values of R1, R2, R3, R4 are 3, 3, 4, 4, respectively. Furthermore, according to the formula
Then the arrangement of soft fingers for the typical pieces were obtained as follows.
For No.1, three soft fingers are needed. They are placed on the edge of the fabric on average angles at around 120°. The grasping margin is set at 10 mm, and the opening distances is 20 mm. For No.2, there are also three soft fingers designated to grasp. Two of them are placed at the intersection angles. The other one is evenly placed on the middle of the long edge of the fabric. The grasping margin and the opening distances are 20 and 8 mm, respectively. For No.3, we will use four soft fingers together to grasp. They are placed at the position of the four intersection angles. The grasping margins are 15 mm and the opening distances of each soft finger are 9 mm. There are six soft fingers together employed for No.4. Four of them are placed at each intersection angle. The last two are placed on the margin of the longest/curved edge of the piece on average. The grasping margins are 25 mm and the opening distances of each soft finger are 23 mm.
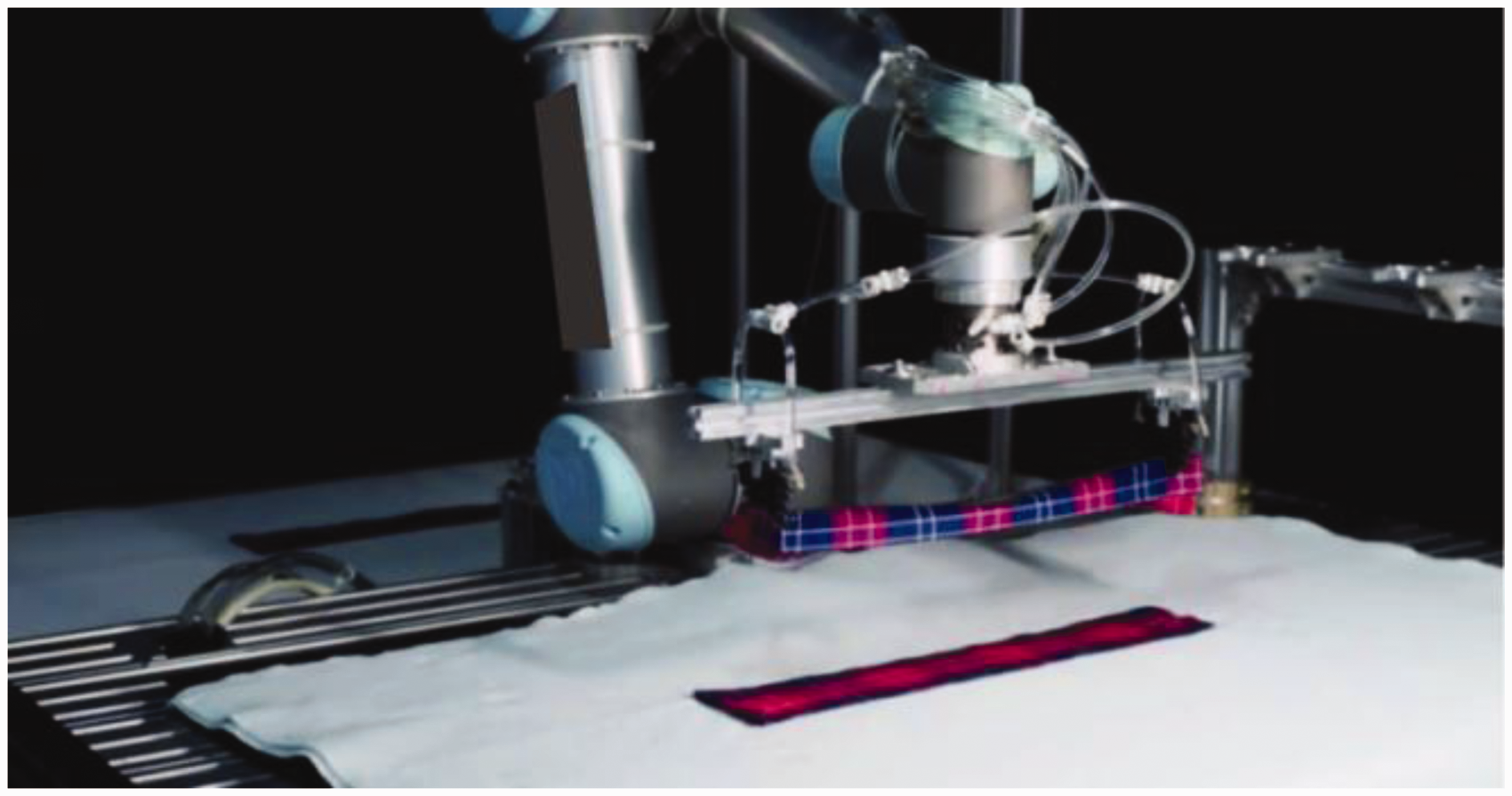
The placement positions for the soft fingers are shown in Figure 19 with red dots, and their application in real situations are shown in Figure 20.

Grasping points for the four kinds of cutting pieces (color online only).
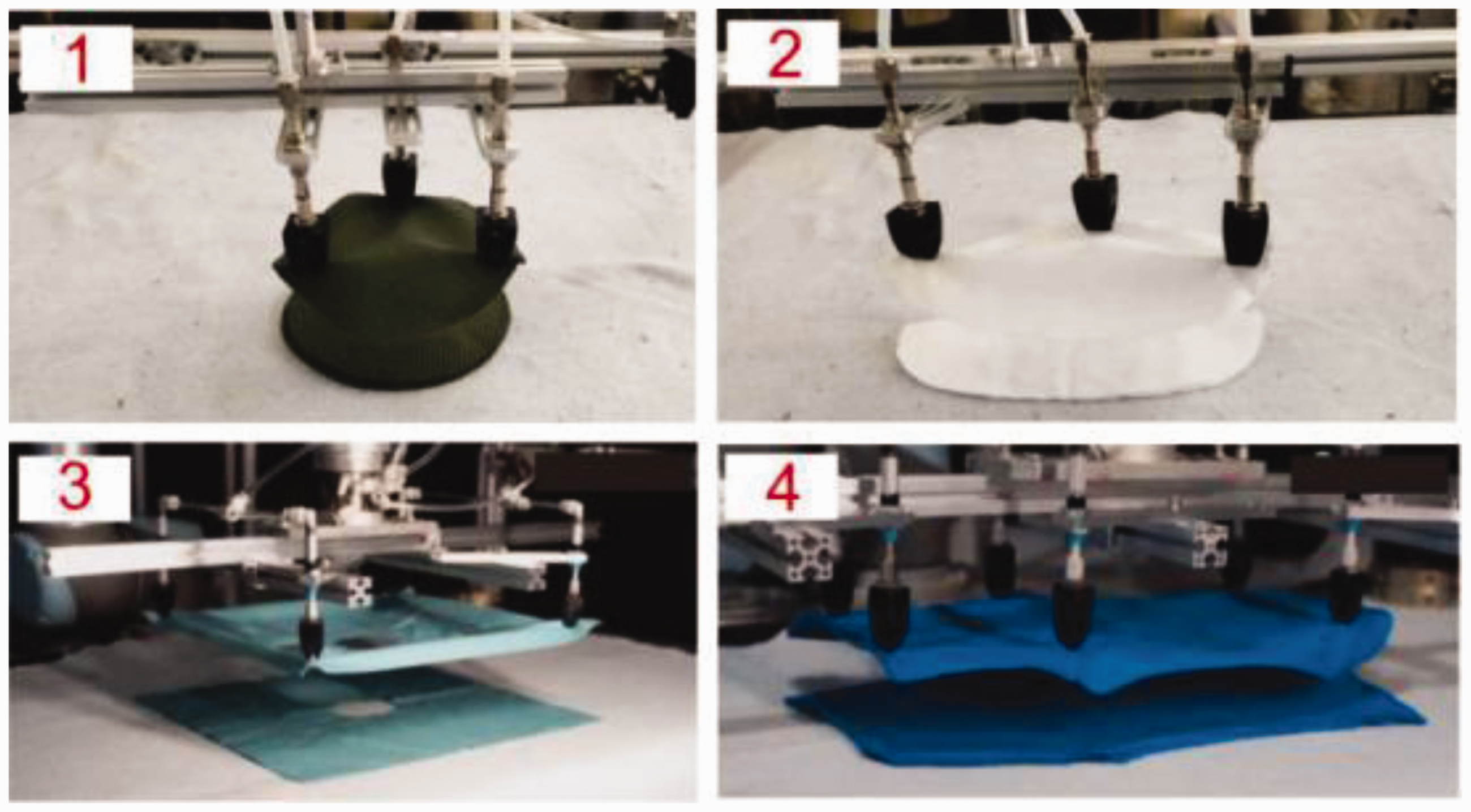
Grasping test on multiple soft fingers working cooperatively.
It can be seen from Figure 20 that the arrangement scheme proposed has good adaptability. Moreover, it is found by hundreds of tests that the arrangement model is more suitable for pieces that have larger areas, such as bodice pieces, sleeve pieces, trouser pieces, and so on.
In this experiment, we did not change the clamping force of the soft fingers. On the one hand, it was found in the pre-experiment that the clamping force of about 0.014 N was the most suitable for grasping the cutting piece. Although the increase of pressure could reduce the number of soft fingers, it was easy to produce creases on the cut piece surface. On the other hand, the purpose of this paper is to propose a more easy-to-understand soft finger arrangement method, so that it can be more convenient for training or application in an industrial production. Even if the clamping force of the soft finger is changed, the arrangement method can be adopted to recalculate the number of soft fingers and change the placement position of the soft fingers accordingly.
There is an exceptive case for small pieces. In fact, there will inevitably be small pieces that cannot accommodate two soft fingers in the mass production of garments. This situation should be handled accordingly. As shown in Figure 21, although at least four soft fingers should be used according to the arrangement scheme for its quadrilateral shape, the shortest side of the piece is only 3 cm, which is not only too narrow but also unnecessary due to its light weight to use four soft fingers. Thus, we used only two fingers along the midline of the piece and picked it up. In addition, the piece could recover to flat due to its elastic resilience after being released from the soft finger.
Special case for grasping a small piece.
Conclusions
This paper carried out two main experiments to explore the factors that influence the effect of grasping a textile pieces by soft fingers.
The conclusions from the single-point grasping experiment show that (a) the grasping margin is a crucial factor that influences the effect of grasping, (b) the sides and the directions of a piece play important roles in grasping, and a reverse side and a vertical direction often bring better results of grasping, and (c) although the opening distance of a soft finger is significant to the result of grasping, successful grasping is a joint result of the grasping margin and the opening distance.
The conclusions from the arrangement experiment of soft fingers show that (a) the shape and the area of a cut piece are the determinants for the number of soft fingers that have to be used, (b) a soft finger is needed at the intersections of a piece to guarantee unfolded grasping and transferring, and (c) the number of soft fingers to be used for a specific grasping task can be estimated after the major factors are determined.
It has been proved that the arrangement of soft fingers for automatic grasping of fabric pieces of a garment proposed in this paper has good applicability on knitted and woven fabrics. Nonwoven fabrics are not researched in this paper, will be studied to optimize our experimental results in the future.
The conclusion proposed is easier to understand and is more convenient for training or application in industrial production. In the future, it is expected to be applied to the intelligent production of clothing, especially intelligent stacking processing, intelligent transportation of semi-finished clothing, intelligent packaging of garment finished products, etc., to promote the clothing industry to a higher level.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Open Project Program of the Fujian Province University Engineering Research Center of Textile and Clothing, Minjiang University, China (No. MJFZ18109).