A sliding mode control (SMC) strategy is proposed for a second-order non-linear system using fractional calculus and adaptive fuzzy compensator, named fuzzy fractional-order SMC (FFOSMC). The major contribution of this research includes the formulation of a robust fractional-order controller based on a novel non-integer sliding manifold. The proposed controller utilizes reduced discontinuous switching gain using a fuzzy logic system. A fractional-order adaptation law is derived to update the fuzzy logic system, which has more degrees of freedom to achieve the desired performance. The stability of the closed-loop system is guaranteed using fractional-order Lyapunov theory. The parameters of the proposed control method are optimized using Simulink response optimization. Finally, the performance of the FFOSMC is fully investigated and compared with a conventional SMC controller and an integral SMC controller. From simulation results, it is concluded that the proposed algorithm is effective and more robust.
Fractional calculus (FC) is a research field that has been considered for several centuries (Gutierrez et al., 2010; Petras, 2011). In earlier literature, this topic was assumed purely theoretical with no applications (Tavazoei et al., 2008). In modern times, FC has emerged quickly and found applications in many areas of science and technology due to the higher degree of freedom provided (Chen and Vinagre, 2003; Couceiro et al., 2010; Nagoya, 2012; Oustaloup et al., 1996). The first fractional-order controller was proposed by Oustaloup. He derived a robust fractional-order control scheme called the Command Robuste d’Ordre Non-Entier (CRONE) (Oustaloup, et al., 1996). A fractional-order robust controller was proposed for a non-linear system by Ullah et al. (2015). A frequency-domain approach has been introduced in Vinagre et al. (2000), and a variable fractional-order controller was introduced in Valerio and Costa (2013). Tuning of fractional-order PID controller was introduced by Domek (2013). A high-performance robust control is proposed by Ullah and Wang (2013).
Sliding mode control (SMC) is a robust control scheme with many applications (Perruquetti and Barbot, 2002). A linear manifold is chosen as the error surface and the control law is formulated. To prove the asymptotic stability and desired performance of the closed loop, a Lyapunov theorem is used. Recently, several researchers have shown great interest in formulating a sliding mode robust controller using FC. Most of the literature concentrates on a non-integer proportional-derivative (FOPD) sliding manifold, which has been applied in antilock braking systems (Tang et al., 2013), twin-tank models (Delavari et al., 2010) and robotic flexible joint manipulators (Fayazi and Nabizadeh, 2011). The FOPD controller design mentioned above does not take uncertainties into account.
Most non-linear systems contain non-linearities, parametric uncertainties and external disturbances. An ideal sliding mode controller inevitably has a discontinuous switching function to deal with the above uncertainties. Due to imperfect switching, chattering is introduced in practice. Reducing the gain of the switching function can minimize the chattering phenomenon. Several researchers utilized a fuzzy logic system (FLS) to tune the gain of the switching control in the FOPD controller (Delavari et al., 2010); Fayazi and Nabizadeh, 2011; Zhang et al., 2012). In this paper, an adaptive fuzzy logic controller is used to approximate unknown non-linearities and parametric uncertainties online. Because the gain of the switching function depends on the upper boundary of uncertainties, a rational design of fuzzy logic controller can estimate uncertainties and reduce the gain of the switching function, which can reduce the chattering phenomenon.
The corresponding control law is formulated based on the fractional Lyapunov stability theory to guarantee the sliding condition. Finally, the performance of the proposed fuzzy fractional-order SMC (FFOSMC) is fully investigated and compared with conventional SMC and integral SMC. The results show that the proposed algorithm is effective and more robust.
Definitions of fractional derivatives and integrals
The basic definition of a fractional operator can be denoted by a general fundamental operator as a generalization of the differential and integral operators, which is defined as follows (Bai and Feng, 2007).
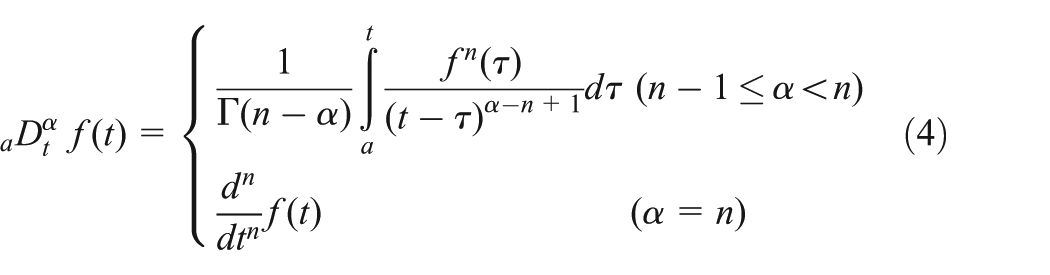
Here represents the order of the fractional operator and represents the set of real numbers. The three definitions used for the general fractional operator are the Riemann–Liouville (RL) definition, the Caputo definition and the Grunwald–Letnikov (GL) definition (Caputo, 1967; Miller and Ross, 1993; Podlubny, 1999). Now the αth order Riemann–Liouville fractional derivative of function is given by
The Riemann–Liouville formula of the αth-order fractional integration can be written as
Here is the first integer larger than , such as , is the interval of integration and is Euler’s Gamma function.
The Caputo fractional derivative expression of a continuous function is expressed as
The GL definition is:
Here h represents the time step that is increasing and [.] is the integer part,
Stability theorem for non-integer-order system
The stability of non-integer systems has been discussed in the literature in detail. Consider the following theorem (Matignon, 1998).
Theorem 1.Consider the fractional-order system:
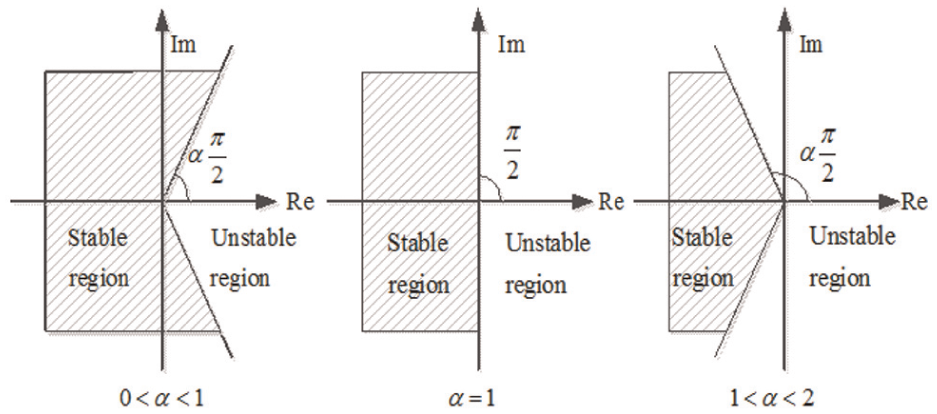
Here α is the differential order, and. The system is asymptotically stable if. In this case, each component of the state decays towards 0 like. Also, this system is stable ifand those critical eigenvalues that satisfyhave geometric multiplicity. Figure 1 shows the stable region for. Obviously, the stable region of fractional system withis largest than that of the other two cases.
Stability region of fractional system.
Non-linear system description and review of control methods
Consider the following second-order non-linear system:
Here , represents the control excitation, represents the unknown disturbance, , is the parametric , represent nominal system input and is the input discrepancy.
Assumption 1. represents the total uncertainty:
is assumed to satisfy the inequality given as
Here is a known positive constant. The objective of the designed controller is to make strictly follow its desired signal . The tracking error is defined as
Fuzzy logic system basic definitions
A fuzzy logic system (FLS) consists of four parts: the knowledge base, the fuzzifier, the fuzzy inference engine working on fuzzy rules and the defuzzifier (Kosko, 1994; Wang, 1997).
The knowledge base for the FLS comprises a collection of fuzzy If–Then rules. The multiple input–multiple output (MIMO) If–Then rule(s) are of the following form:
Here
: If is , is ,…, is , then is ,…, is
where M represents the total number of rules; and represents the input and output vectors of the fuzzy system, respectively. and are the linguistic variables of the fuzzy sets in the subspace and , described by their membership functions and , l = 1, 2, …, M.
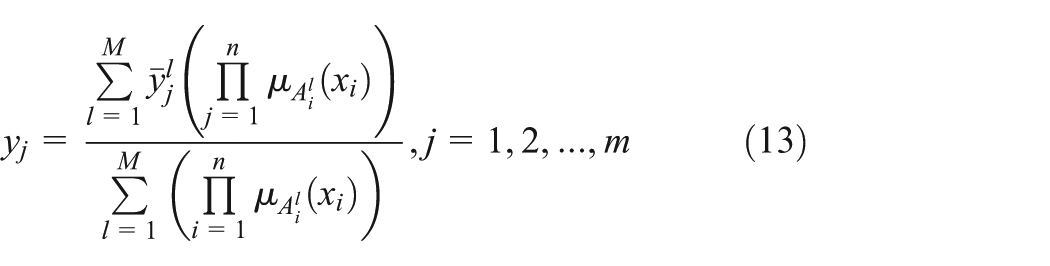
Definition 1. The output of a MIMO-FLS with centre-average defuzzifier, product inference and singleton fuzzifier is of the following form:
Here is the point in at which achieves its maximum value 1.
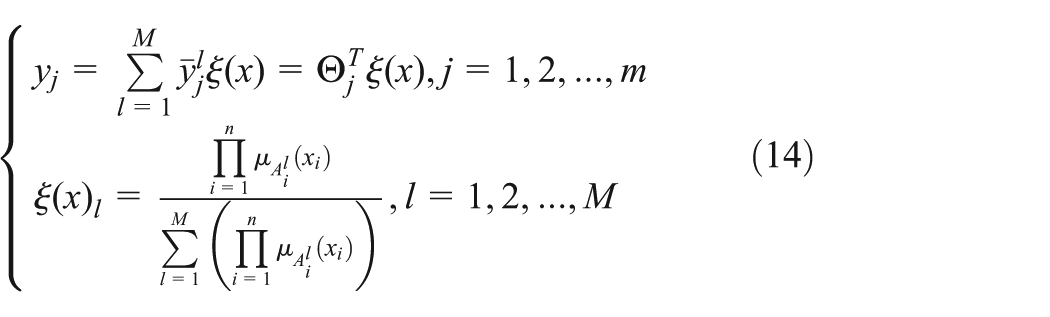
To maintain a consistent performance of the fuzzy system in situations where there is a large uncertainty or unknown variation in plant parameters and structures, the fuzzy system should be adaptive (Yoo and Ham, 2000). Therefore, Equation (13) can be rewritten as
where is called the fuzzy basis function vector and is called the parameter vector.
It has been proved that the adaptive fuzzy system can approximate any real continuous function over a compact set to arbitrary accuracy.
Lemma 1 (Yoo and Ham, 2000). Letbe a continuous function defined on a compact set ∂. Then for any constant scalar, there exist a fuzzy logic system and ideal parameter vectorsuch that
Sliding mode control (integer-order)
The concept of SMC is based on variable structure control theory. Classical SMC with a linear error manifold is robust to matched disturbances and uncertainties, and is commonly used for both linear and non-linear systems (Utkin and Chang, 2002). Classical SMC exhibits chattering phenomena due to which its practical implementation is hard to realize. To reduce chattering, several methods have been proposed, such as disturbance observer-based SMC (Kawamura et al., 1992), adaptive fuzzy sliding mode (Ho et al., 2009) and continuous sliding mode (Young et al., 1999). A simple and effective method for chattering reduction is to replace the discontinuous function by a function, but the steady-state error does not converge to zero (Seshagiri and Khalil, 2005). To preserve the robustness, Bartolini et al. (2000) proposed a second-order SMC method. Due to the integral action, steady-state error is zero but at the cost of degradation of transient performance. Seshagiri and Khalil (2005) proposed a conditional integral SMC method to recover the transient performance. Integral SMC with a fractional-order reaching law and its application to quadrotor are discussed in Mehmet (2011).
Integer-order sliding mode control (SMC)
A classical sliding surface is given as:
Here is the design parameter. Differentiating Equation (16), one can obtain
To derive the equivalent control set , the desired response can be achieved by choosing the control law as
where is the equivalent control item to drive the nominal part of system, is the robust switching control item to handle the lumped uncertainty and a sliding condition will occur if . Here represents upper bound of lumped uncertainty and is the signum function defined as
The Lyapunov function is
Combining Equations (18), (19) and (21), it can be shown that provided that switching gain
Integral sliding mode control (ISMC)
The integral sliding manifold is defined as
Here are the design parameters. Differentiating Equation (23), one obtains
In this section, fuzzy SMC with fractional dynamics is derived for trajectory tracking of a class of second-order uncertain dynamical systems. The fractional-order sliding manifold is defined as:
where represents the order of the fractional operator and is the positive parameter. Apply to Equation (28), one obtains
Theorem 2.Considering system (8) satisfying Assumption 1, the proposed fractional-order SMC (31) will stabilize the closed-loop system and the tracking error converges to zero.
By letting , , which means that reaching condition of sliding surface is satisfied and . At this stage, two proofs are necessary. In first proof, Equation (31) with is analogous to a fractional-order system of the form , so its stability is proved using the following theorem.
Theorem 3 (Sabatier et al., 2010). A fractional-order system (28) with(outcome of Theorem 2) of orderis stable if and only if there exists a matrixsuch that:
Proof. To prove Theorem 3, letting in Equation (28) yields
From Equation (51), it is proved that sliding surface converges to zero in finite time. Theorem 1 can also be used to prove the stability and convergence property as the following.
Fuzzy fractional-order sliding mode control (FFOSMC)
As the control accuracy is influenced by the lumped uncertainty , we propose the adaptive fuzzy compensator to handle the lumped uncertainty in the above fractional sliding mode surface. The fuzzy compensator is given by (Wang, 1997):
where , , , . and are fuzzy sets of and , respectively. and are the membership functions of and , respectively.
The column vector of the optimal parameter can be defined as follows:
where and are the sets of and . With the optimal parameter vector of the FLS, the minimum approximation errors can be defined as
Using similar formulations as given previously, the proposed control is derived as:
where , and there is no doubt that and controller (56) with fuzzy compensator only requires , so the application of fuzzy compensator can reduce the gain of the switching function.
Theorem 4.Considering the system of Equation (8) satisfying Assumption 1, the proposed control law (56) guarantees that all system signals are bounded under closed-loop operation, and asymptotic output tracking is also achieved, i.e. e1→ 0 as t→∞.
From Equation (60), choose the adaptive law as , so that
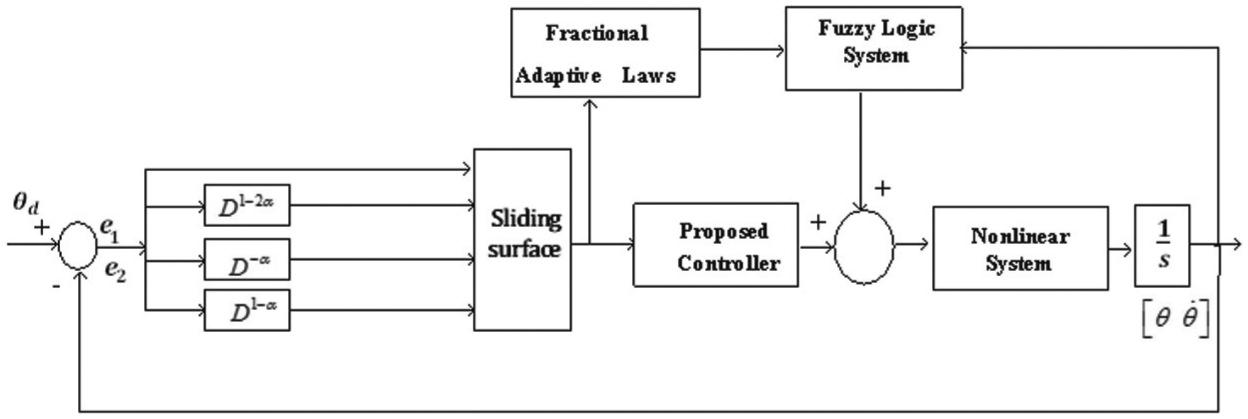
Therefore, with the necessary condition , the sliding surface s will converge to zero and the sliding condition is achieved. The convergence proof is the same as shown in the above section, using Theorem 3. The proposed controller is shown in Figure 2.
Proposed control scheme.
Numerical results and discussions
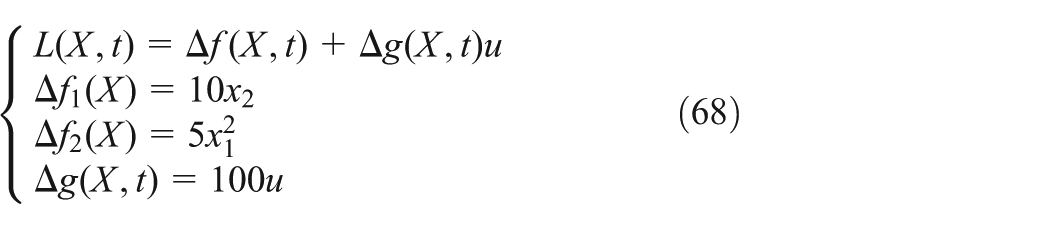
In this section, the efficiency of the proposed control method is verified using numerical simulations. A permanent magnet synchronous motor (PMSM) is widely used in industry due to its high power density, high torque to inertia and control in a DC motor (Shyu et al., 2002). Controlling this system has practical importance. Assuming that the stator windings generate a sinusoidal magnetic field, its mathematical model is written as:
Here the state variables x1 and x2 are the angle and velocity of the PMSM system, u represents the control signal and L(X,t) contains the lumped uncertainty and external disturbance. B is the viscous friction coefficient, J is the motor moment inertia constant, P is number of pole pairs and Ψf is the flux linkage of the permanent magnet. The nominal valves of system parameters are defined as , , and .
To minimize high-frequency chattering, a discontinuous sign function is replaced by a saturation function, which is defined as
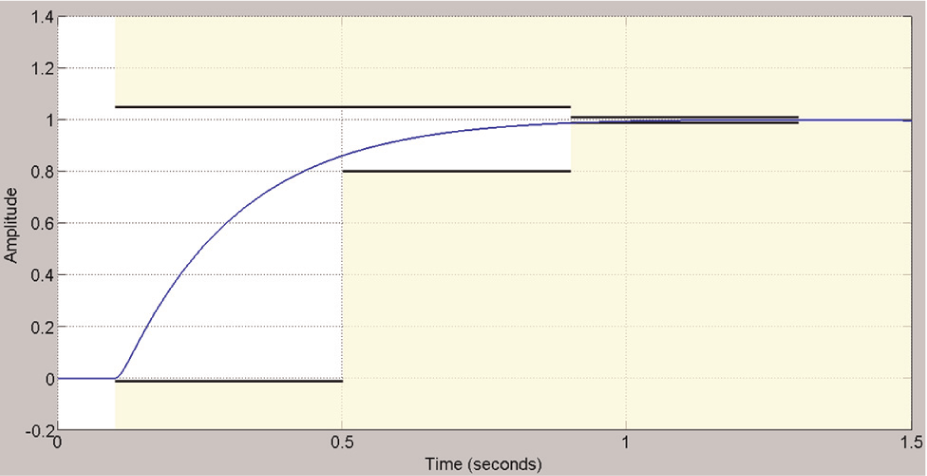
Here is the boundary layer width. Figure 3 shows controller tuning using Simulink design optimization for the step response. The optimized controller parameters are , , , , , .
Controller tuning using unit step response optimization.
Practically, it is necessary to solve fractional-order systems numerically; however, it is a tedious job to obtain the exact solution. So approximation is used to realize a fractional differential equation. A popular frequency approximation method is presented by Oustaloup et al. (1996) and is given as:
K represents gain. For Equation (64) to have a unit gain at 1 rad/s, ωz,i and ωp,i are given as
In Equation (65), ωb and ωh represent the lower and upper frequency bounds and usually ωbωh = 1. For the case α < 0, Equation (65) is inverted. For , the approximation is not satisfactory, so fractional powers of s are split as:
Step tracking performance comparison
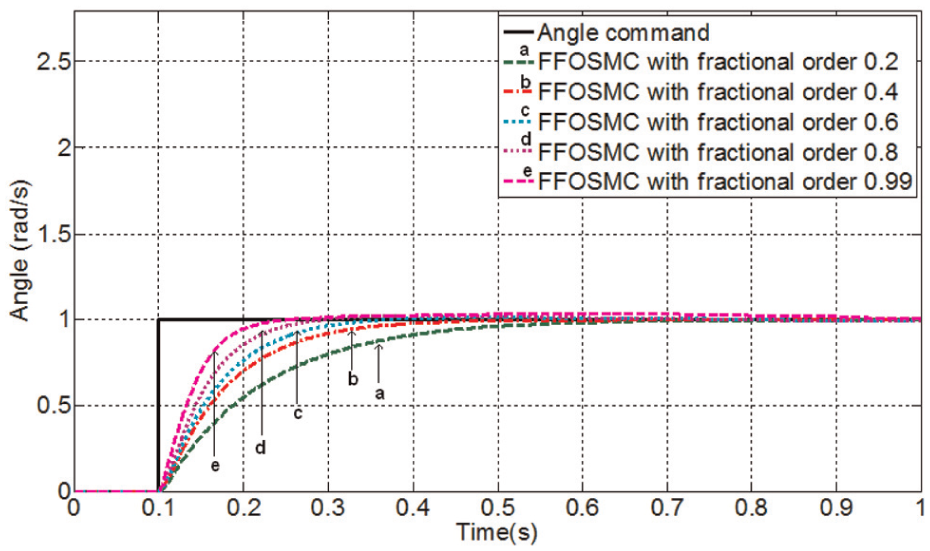
The reference command is a step angle with θref = 1 rad, and the order of FOSMC and FFOSMC is . The unit step response comparisons of the system for a different fractional-order of FFOSMC controller are shown in Figure 4.
Step response comparison with different fractional order.
From Figure 4, it is concluded that as the fractional order of the FFOSMC varies from 0.2 to 0.99, the rise and settling times of the system improve significantly. At the same time, the system shows overshoot as the fractional order is increased above 0.6. So for the rest of analysis, the fractional order of the FFOSMC is selected as 0.5.
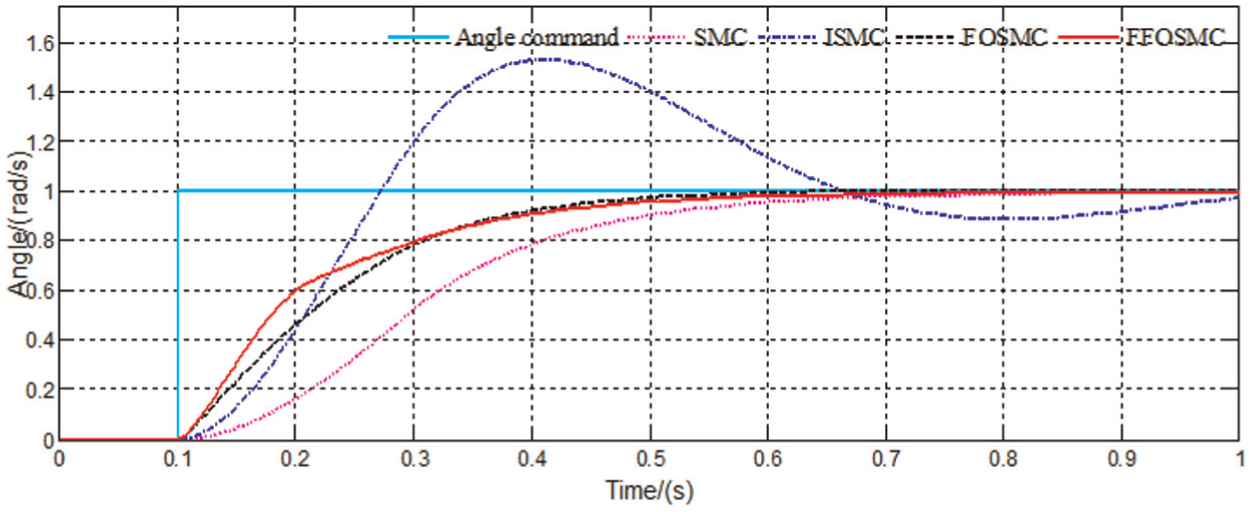
From Figure 5, it is concluded that the proposed FOSMC and FFOSMC methods track the reference command with the smallest rise time, peak overshoot and settling time, compared with SMC and ISMC. It is concluded that the angle-tracking errors of the proposed methods are the lowest.
Unit step response comparison.
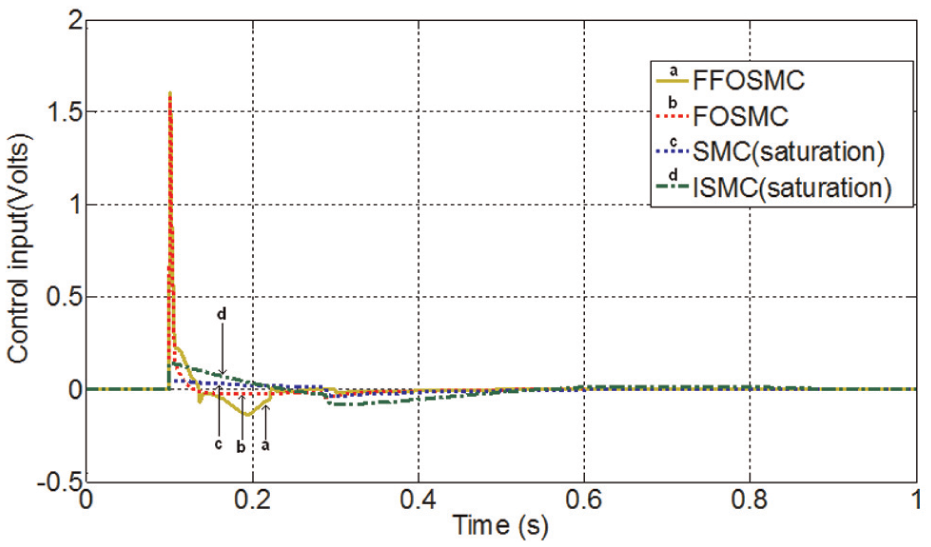
Control input comparisons are given in Figure 6. From simulation results, it is concluded that the control inputs of both FOSMC and FFOSMC are large in the start of the cycle and then show a sharp decreasing trend, while the control inputs for SMC and ISMC are numerically small for t > 0.1 s. Although the control input of the proposed controller is numerically large in the start of cycle, the large peak exists for a very small time. So the average control effort of FFOSMC is comparable with SMC and ISMC, and far below the saturation limit of the drive.
Control input comparison.
Robust performance comparison with parametric uncertainties and unmodelled dynamics
In this case, the lumped uncertainty only contains the uncertainty term, which is given by
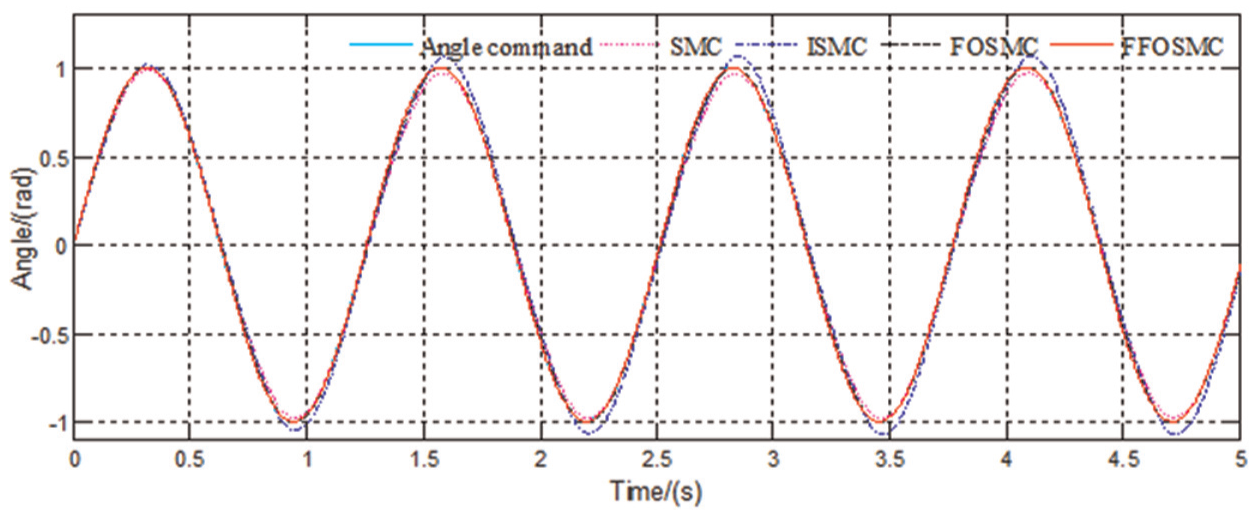
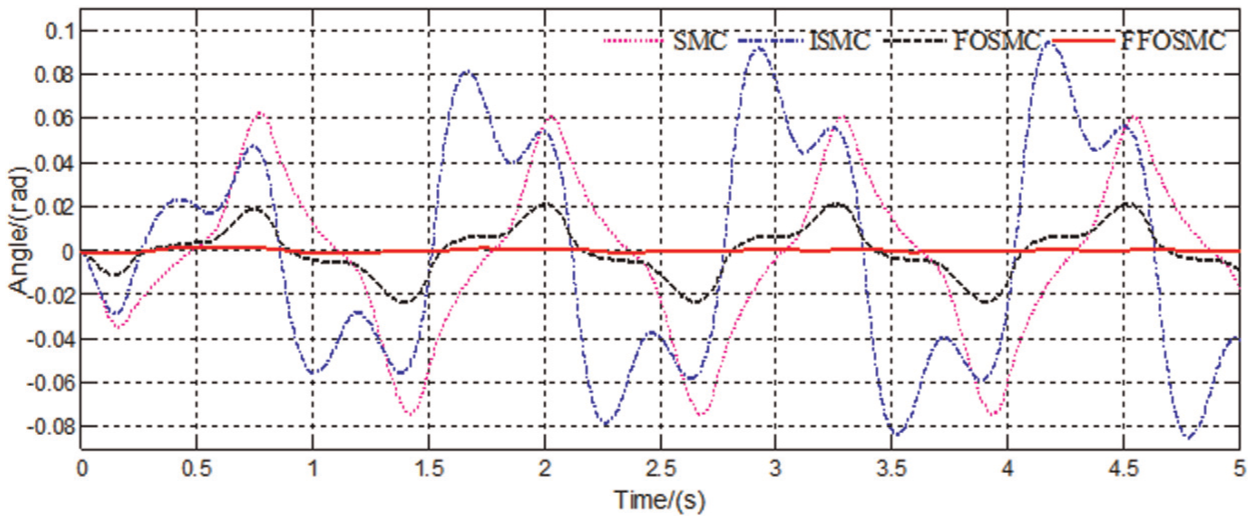
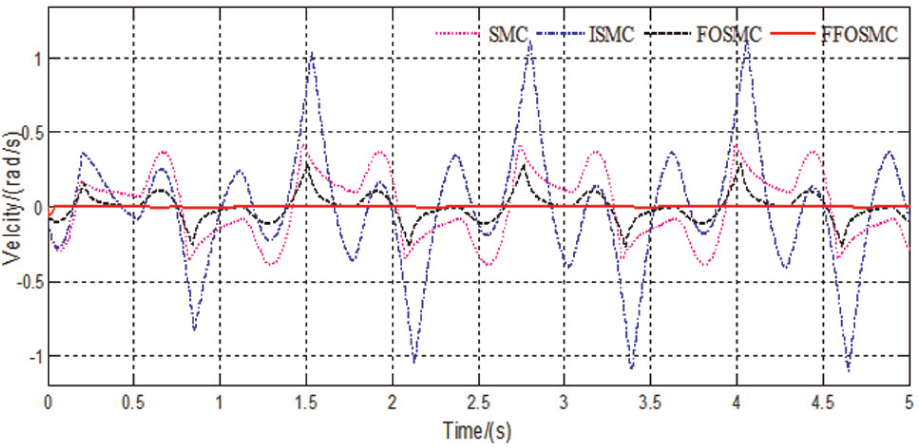
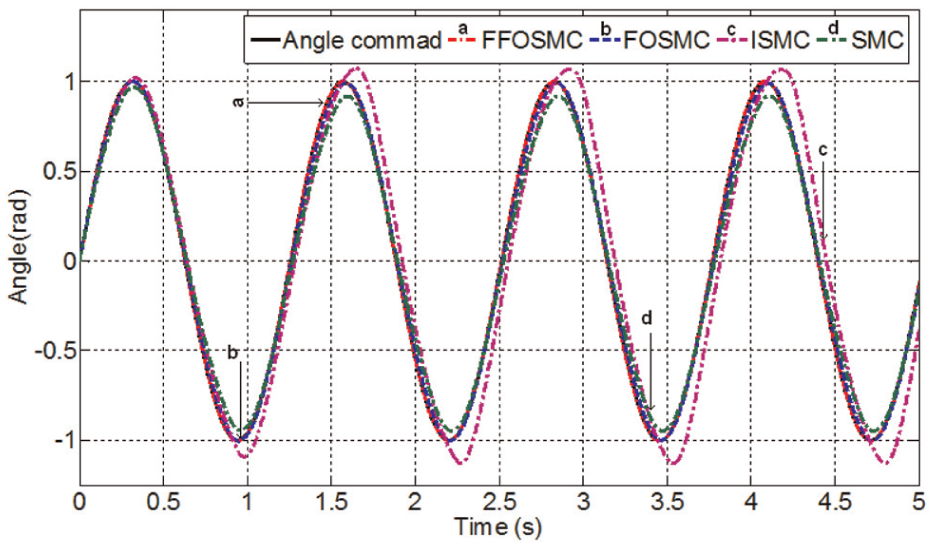
Here are the parametric uncertainties and represents the unmodelled dynamics. In this case, in order better to compare the robust performance of different controllers, the boundary of is larger than the gain of switching/saturation function. The reference command is a sinusoidal trajectory with , and the order of FOSMC is . Figure 7 is the angle tracking response of the PMSM system with different controllers. The tracking errors of the angle and velocity are given in Figures 8 and 9, respectively.
The time response of the permanent magnet synchronous motor (PMSM) system for tracking the desired trajectory.
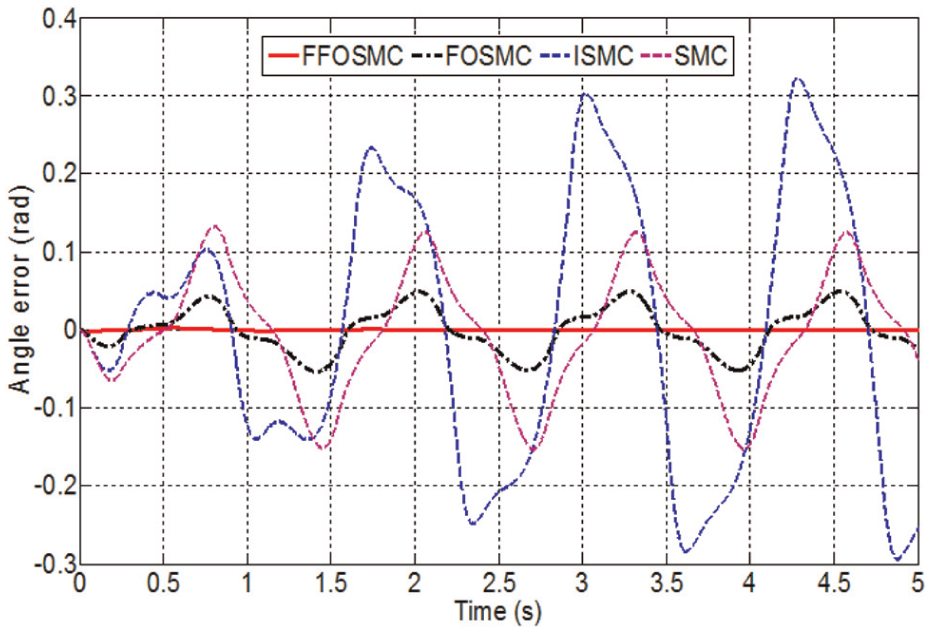
Tracking errors of angle.
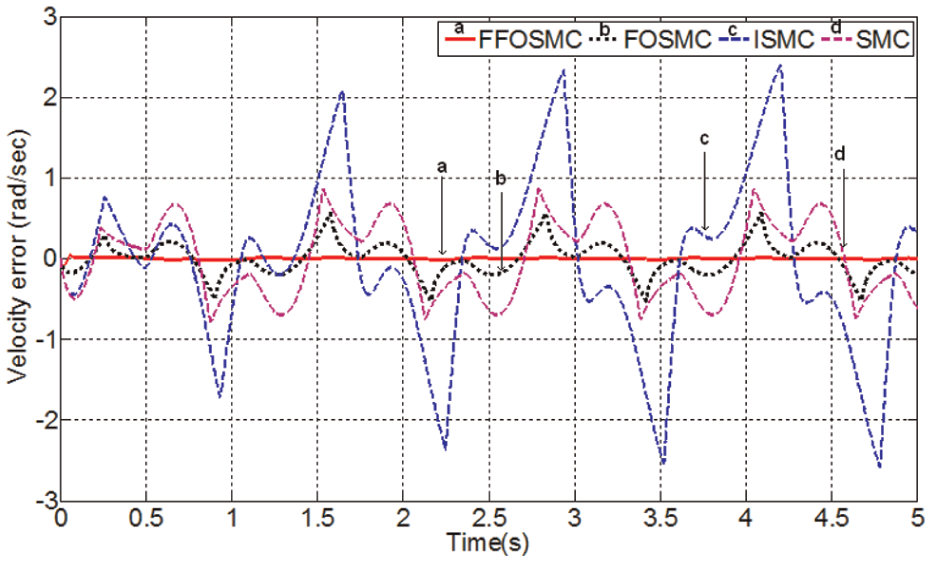
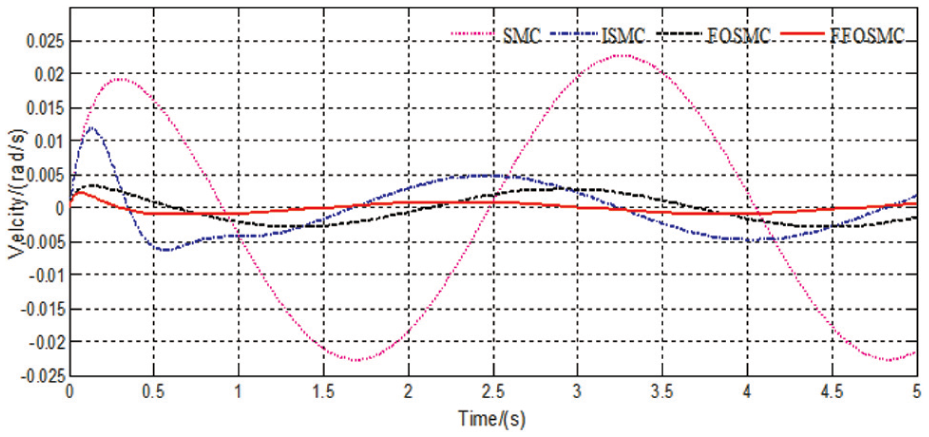
Tracking errors of velocity.
It is shown that tracking error of FOSMC is smaller compared with conventional SMC and ISMC. Because in this case the gain of switching/saturation function is less than boundary of , the tracking errors of above three controllers do not converge to zero/. In comparison, the tracking error of FFOSMC almost converges to zero due to the fuzzy compensator.
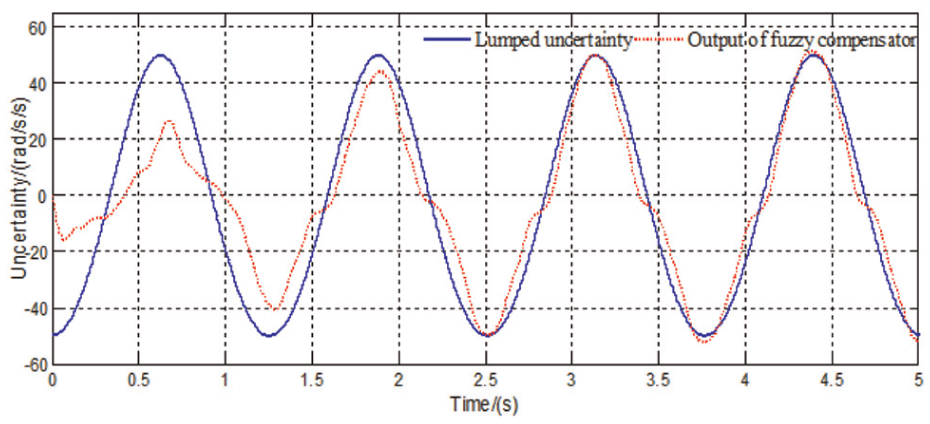
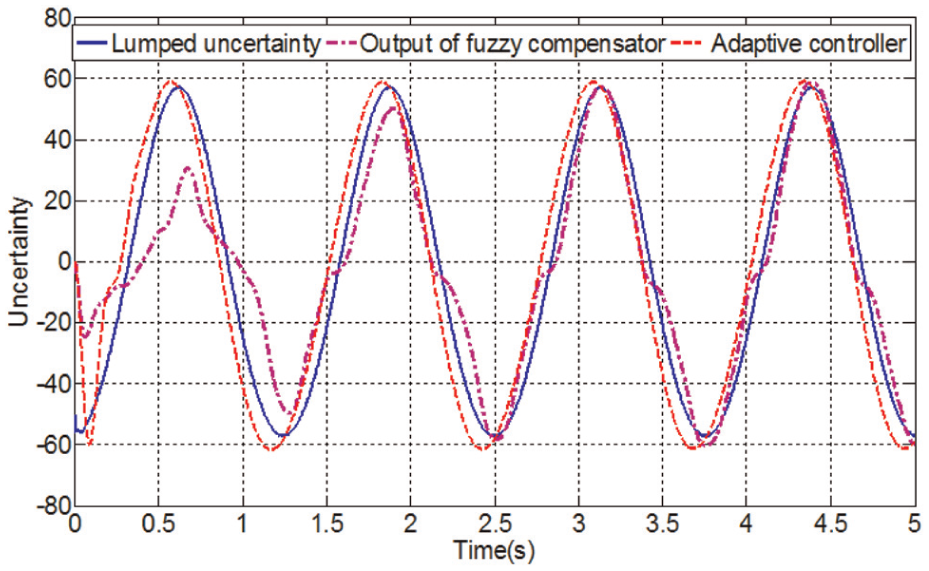
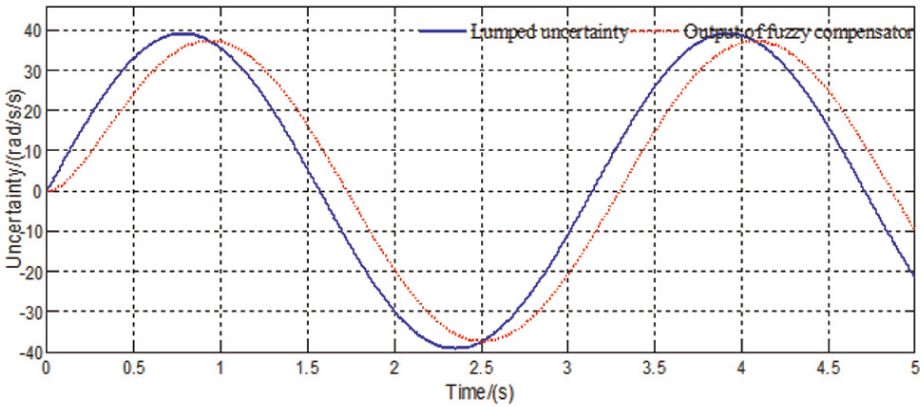
The lumped uncertainty and output of fuzzy compensator are shown in Figure 10.
The lumped uncertainty and the output of fuzzy compensator .
It can be found that the output of fuzzy compensator can approximate the lumped uncertainty .
In the second case, the lumped uncertainty contains the uncertainty term, which is also a function of the control input given as
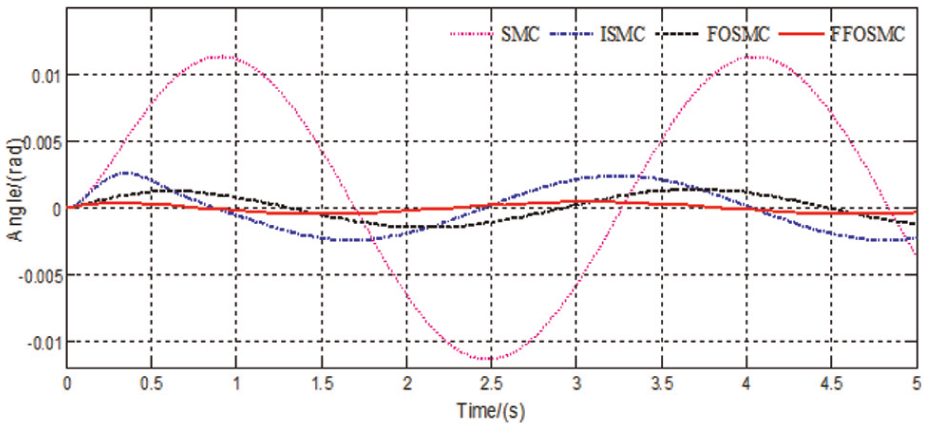
The reference command is a sinusoidal trajectory with , and the order of the FOSMC is . Figure 11 is the angle tracking response of the PMSM system with different controllers. The tracking errors of angle and velocity are given in Figures 12 and 13, respectively. From the given results, it is concluded that, compared with SMC, ISMC and FOSMC, the proposed controller is more robust to the lumped uncertainty given in Equation (68) and it ensures the lowest tracking angle and velocity errors.
Tracking the desired trajectory with lumped uncertainty.
Tracking errors of angle.
Tracking errors of velocity.
Performance comparison with adaptive PID
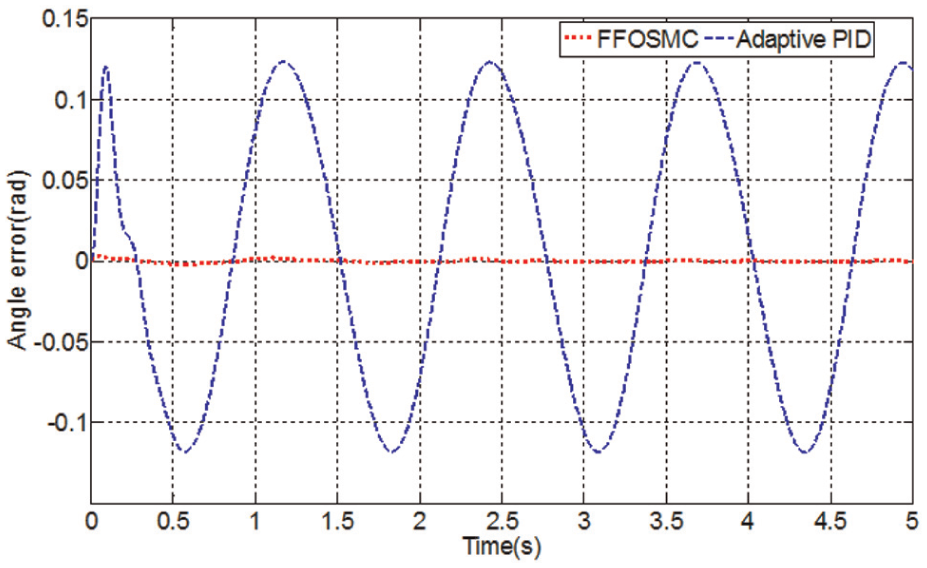
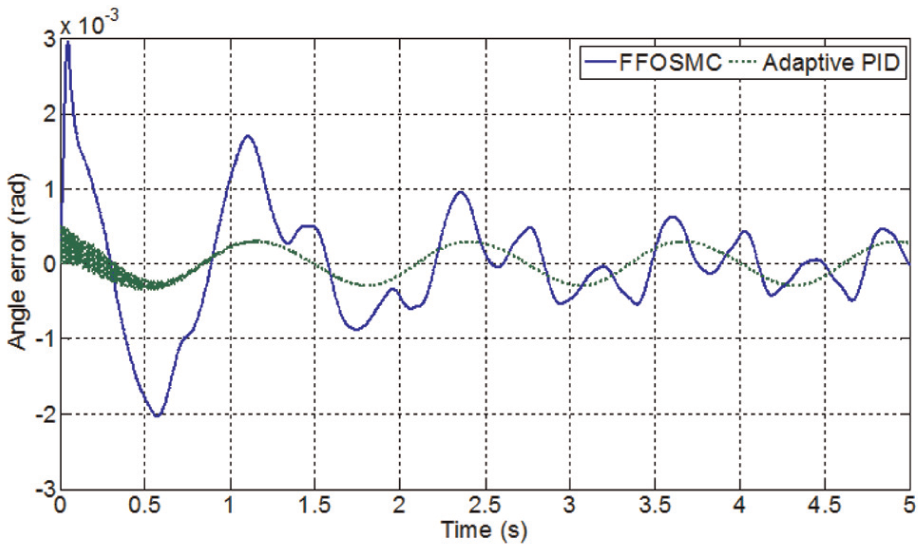
This section presents a performance comparison of FFOSMC with an adaptive PID method. The reference command is a sinusoidal trajectory with , and the order of the FOSMC is . The parameters of the PID controller are selected as . An adaptive law is derived as , where represents the learning rate. The system is subjected to lumped uncertainty of Equation (67). The simulation results are presented for and 350. Figure 14 is the angle tracking response comparison of the PMSM system. For this case, . Compared with the proposed control method, the angle error in the case of adaptive PID is 0.1 rad. Comparative analysis of estimated lumped uncertainty is given in Figure 15.
Tracking errors of angle.
Estimated lumped uncertainty.
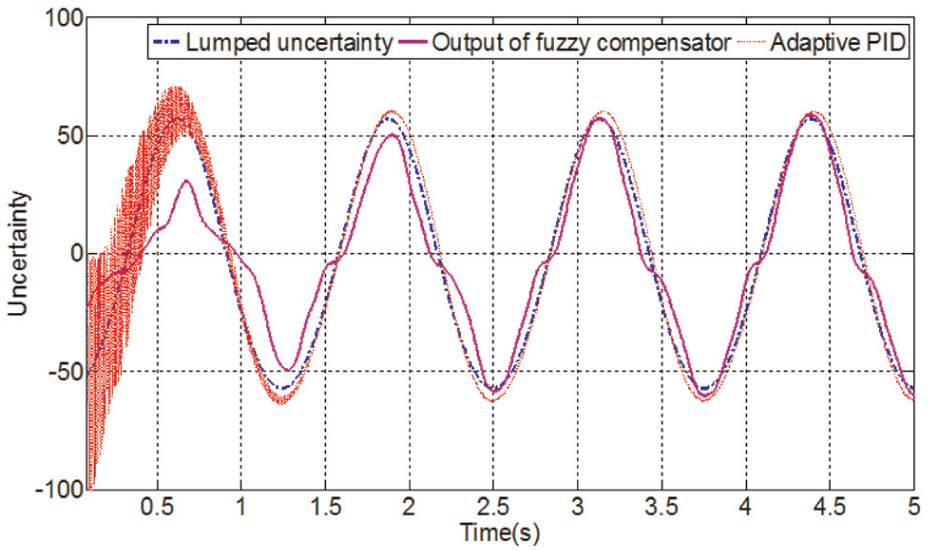
If the learning rate of the adaptive PID is increased from 100 to 350, then the angle-tracking error is significantly reduced but at the cost of high-frequency oscillations in the estimation loop. The simulation results are given in Figures 16 and 17.
Tracking error of angle.
Estimated lumped uncertainty comparisons.
Robust performance comparison with external disturbance
In this simulation, the lumped uncertainty only contains the external load disturbance, which is given by . The position reference is a zero trajectory with , and the order of the FOSMC is . The tracking errors of the angle and velocity are given in Figures 18 and 19, respectively.
Tracking errors of angle.
Tracking errors of velocity.
It is concluded that the tracking error of FOSMC and FFOSMC are smaller compared with conventional SMC and ISMC, but the tracking error of FFOSMC is smallest, due to the fuzzy compensator. The lumped uncertainty and the output of fuzzy compensator are shown in Figure 20.
The lumped uncertainty and the output of fuzzy compensator .
It can be found that output of fuzzy compensator can approximate the lumped uncertainty .
Conclusions
A new, systematic design of the adaptive fractional-order sliding mode controller (FFOSMC) for PMSM, a position control system, is presented and system stability is guaranteed using a fractional-order Lyapunov theorem. By combining the advantages of the fractional PIα sliding surface and PDλ sliding surface, a novel fractional-order sliding surface is proposed. The parameters of the proposed controller are optimized for a step response using Simulink design optimization. The proposed controller has more degrees of freedom to achieve the desired performance. The control performance considering control precision and system robustness of the proposed FFOSMC method is better than that of the conventional SMC method and the integral SMC method. A fractional-order adaptive fuzzy logic controller is used to approximate uncertain non-linearities and parametric uncertainties online. The proposed controller is compared with an adaptive PID controller. From the analysis given in the research article, it is concluded that FFOSMC is more robust and the control signal is less corrupted by high-frequency oscillations. To ensure better robustness, the average control effort required by the FFOSMC is almost the same order compared with all other controllers used in the analysis. The analysis proves that the proposed FFOSMC is superior and feasible for practical implementations.
Footnotes
Conflict of interest
The authors declare that there is no conflict of interest.
Funding
This research received no specific grant from any funding agency in the public, commercial or not-for-profit sectors.
References
1.
AghababaMP (2014) A Lyapunov-based control scheme for robust stabilization of fractional chaotic systems. Nonlinear Dynamics78(3): 2129–2140.
2.
BaiJFengXC (2007) Fractional-order anisotropic diffusion for image de-noising. IEEE Transactions on Image Processing16(10): 2492–2502.
3.
BartoliniGFerraraAUsaiE. (2000) On multi-input chattering free second order sliding mode control. IEEE Transactions on Automatic Control45(9): 1711–1717.
4.
CaputoM (1967) Linear models of dissipation whose Q is almost frequency independent – II. Geophysical Journal13(5): 529–539.
5.
ChenYVinagreBM (2003). A new IIR-type digital fractional order differentiator. Signal Processing83(11): 2359–2365.
6.
CouceiroMSFonseca FerreiraNMTenreiro MachadoJA (2010) Application of fractional algorithms in the control of a robotic bird. Communications in Nonlinear Science and Numerical Simulation15(4): 895–910.
7.
DelavariHGhaderiRRanjbarA (2010) Fuzzy fractional order sliding mode controller for nonlinear systems. Communications in Nonlinear Science and Numerical Simulation15(4): 963–978.
8.
DomekS (2013) Switched state model predictive control of fractional-order nonlinear discrete-time systems. Asian Journal of Control15: 658–668.
9.
FayaziANabizadehRH (2011) Fractional order fuzzy sliding mode controller for robotic flexible joint manipulators. In: 9th IEEE International Conference on Control and Automation (ICCA), pp. 1244–1249.
10.
GutierrezRERosarioJMTenreiroMJ (2010) Fractional order calculus: basic concepts and engineering applications. Mathematical Problems in Engineering2010: 1–9.
11.
HoHFWongYKRadAB (2009) Adaptive fuzzy sliding mode control with chattering elimination for nonlinear SISO systems. Simulation Modeling Practice and Theory17(7): 1199–1210.
12.
KawamuraAItohHSakamotoK (1992) Chattering reduction of disturbance observer based sliding mode control. IEEE Transactions on Industry Applications30(2): 456–461.
13.
KoskoB (1994) Fuzzy systems as universal approximators. IEEE Transactions on Computers43(11): 1329–1333.
14.
MatignonD (1998) Stability properties for generalized fractional differential systems. ESAIM Proceedings, Fractional Differential Systems Models Methods and Applications5: 145–158.
15.
MehmetOE (2011) Integral sliding mode control of a quad-rotor with fractional order reaching dynamics. Transactions of the Institute of Measurement and Control33(8): 985–1003.
16.
MillerKRossB (1993) An Introduction to the Fractional Calculus and Fractional Differential Equations. San Francisco, CA: Wiley Interscience.
17.
NagoyaH (2012) Realizations of affine Weyl group symmetries on the quantum Painleve equations by fractional calculus. Letters in Mathematical Physics102(3): 297–321.
18.
OustaloupAMoreauXNouillantM (1996) The CRONE suspension. Control Engineering Practice4(8): 1101–1108.
19.
PerruquettiWBarbotJP (2002) Sliding Mode Control in Engineering. New York: Marcel Dekker.
20.
PetrasI (2011) Fractional-order nonlinear systems modeling, analysis and simulation. In: Nonlinear Physical Sciences. Berlin: Springer Science.
21.
PodlubnyI (1999) Fractional Differential Equations. New York: Academic Press.
22.
SabatierJMozeMFargesC (2010) LMI stability conditions of fractional order systems. Computers and Mathematics with Applications59(5): 1594–1609.
23.
SeshagiriSKhalilHK (2005) Robust output feedback regulation of minimum phase nonlinear systems using conditional integrator. Automatica41(1): 43–54.
24.
ShyuKKLaiCKTsaiYW. (2002) A newly robust controller design for the position control of permanent-magnet synchronous motor. IEEE Transactions on Industrial Electronics49(3): 558–565.
25.
TangYZhangXZhangD. (2013) Fractional order sliding mode controller design for antilock braking systems. Neuro-computing111(2): 122–130.
26.
TavazoeiMSHaeriMJafariS. (2008). Some applications of fractional calculus in suppression of chaotic oscillations. IEEE Transactions on Industrial Electronics55(11): 4094–4101.
27.
UllahNWangS. (2014) High performance direct torque control of electrical aerodynamics load simulator using adaptive fuzzy backstepping control. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering229(2): 369–383.
28.
UllahNWangSKhattakMI. (2015) Fractional order adaptive fuzzy sliding mode controller for a position servo system subjected to aerodynamic loading and nonlinearities. Aerospace Science and Technology43: 381–387.
29.
UtkinVIChangHC (2002) Sliding mode control on electromechanical systems. Mathematical Problems in Engineering33: 451–471.
30.
ValerioDCostaJS (2013) Variable order fractional controllers. Asian Journal of Control15: 648–657.
31.
VinagreBPodlubnyIDorcakL. (2000) On fractional PID controllers: a frequency domain approach. In: Proceedings of the IFAC Workshop on Digital Control Past Present and Future of PID Control, Terrasa, Spain, pp. 53–58.
32.
WangLX (1997) A Course in Fuzzy Systems and Control. Englewood Cliffs, NJ: Prentice-Hall.
33.
YooBKHamWC (2000) Adaptive control of robot manipulator using fuzzy compensator. IEEE Transaction on Fuzzy Systems8(2): 212–216.
34.
YoungKDUtkinVIOzgunerU (1999) A control engineer’s guide to sliding mode control. IEEE Transactions on Control Systems Technology7(3): 328–342.
35.
ZhangBTPiYGLuoY (2012) Fractional order sliding-mode control based on parameters auto-tuning for velocity control of permanent magnet synchronous motor. ISA Transactions51(5): 649–656.