
Abstract
The consensus problem of heterogeneous first-order multi-agent systems with diverse nominal velocities is investigated in this paper, and three adaptive consensus algorithms are constructed by introducing an adaptive variable into the usual consensus algorithm. Under fixed interconnection topology, consensus criteria are obtained for the three algorithms. Moreover, delay-dependent consensus criteria are also presented for the three algorithms in synchronously coupled form under identical input delay and communication delay. Numerical examples are presented to illustrate the validity of our theoretical results.
Introduction
Recently, the consensus behaviour of distributed multiple autonomous dynamic agents has attracted much attention for its broad engineering applications, e.g. formation control of unmanned aerial vehicles, air traffic control and congestion control in the Internet, and has been extensively studied in various research fields including physics, computer simulation, and control theory, etc.
The consensus problem, which requires the outputs of several distributed autonomous agents to reach a common agreement, has been analysed mainly for homogeneous multi-agent systems, such as the identical single integrators called first-order multi-agent systems (Jadbabaie et al., 2003; Olfti-Saber and Murray, 2004; Ren, 2007; Sun et al., 2008) and the identical double integrators called second-order multi-agent systems (Cepeda-Gomez and Olgac, 2012; Hong et al., 2007; Ren and Atkins, 2007; Qin et al., 2011; Yu et al., 2010). Various consensus criteria have been obtained for the agents achieving asymptotic consensus under fixed topology or switching topologies.
Because the dynamics of agents coupled with each other are always different for various restrictions in real engineering applications, the consensus problem of the heterogeneous multi-agent system, which consists of agents with distinct dynamics, has interested many researchers in recent years.
Lee and Spong (2006) investigated the consensus problem of heterogeneous multiple dynamic agents, which were described by strictly stable linear systems, with diverse communication delays, and gained delay-independent consensus conditions in distributed form according to the spectral radius theorem. Liu and Liu (2011, 2013) and Zheng and Wang (2012) studied a simple heterogeneous multi-agent systems composed of first-order agents and second-order agents, and obtained consensus conditions for the agents under fixed or switching topologies. Hu et al. (2014) considered a heterogeneous multi-agent system consisting of Euler–Lagrange agents and double-integrator agents, and proposed a group consensus protocol with time-varying estimators of uncertain parameters. Based on algebraic graph theory and Barbalat’s lemma, sufficient convergence conditions were obtained (Hu et al., 2014). For heterogeneous multi-agent systems composed of single integrators, double integrators and nonlinear Euler–Lagrange agents, Liu et al. (2014) designed a stationary consensus algorithm and obtained the consensus criteria with some assumptions on exactly known parameters.
For heterogeneous linear multi-agent systems with parameter uncertainties, Kim et al. (2011) used the internal model principle to construct a distributed consensus algorithm based on output information to solve the output consensus seeking problem under some assumptions. Zhu (2014) investigated a class of heterogeneous linear multi-agent systems with a directed ring topology and solved the synchronization problem by using harmonic control. Dong et al. (2014) considered the leader-following output consensus tracking control of heterogeneous linear multi-agent systems, and proposed a distributed state feedback and an output feedback control, according to the internal model principle and the distributed estimation. Tian and Zhang (2012) studied the consensus problem for heterogeneous linear multi-agent systems with unknown communication delays, and adopted a distributed consensus algorithm with devisable self-delays, which were not assigned to equal the corresponding communication delays. In addition, a simple adaptive adjustment algorithm was also presented for online adjusting of the self-delays if the communication delays were unknown (Tian and Zhang, 2012). Moreover, Muenz et al. (2012) investigated a heterogeneous linear multi-agent system with unknown but bounded self-delays and communication delays. By analysing the convex sets of the frequency-domain feedback matrix, set-valued consensus conditions, which are robust and scalable to arbitrary scale topologies and arbitrary bounded time delays, have been obtained for the linear agents under synchronously coupled and asynchronously coupled consensus algorithms (Muenz et al., 2012).
The current literature on heterogeneous multi-agent systems has mainly focused on analysing the consensus algorithms, which have designs based on the agents’ states or outputs directly, but there has been little attention to the design of compensating for the distinct agents’ dynamics to make a heterogeneous multi-agent system become a homogeneous multi-agent system.
In this paper, we investigate a class of heterogeneous linear first-order agents, in which the agents have diverse non-zero nominal velocities. Three consensus algorithms in different forms are designed as the usual distributed consensus algorithm accompanied with an adaptive variable determined by the coordination control part based on local neighbouring agents’ states. Firstly, consensus criteria are presented for the three algorithms under fixed interconnection topology. Then, delay-dependent consensus criteria are also obtained for our proposed algorithms in synchronously coupled form under identical input delay and communication delay.
Problem formulation
The first-order agent’s dynamic is given by

where αi ∈ R is a constant and denotes the nominal velocity of each agent and xi ∈ R and ui ∈ R are the state and input of agent i, respectively. In general, we say that the first-order dynamic agents (1) converge to a consensus asymptotically, if the agents’ states under arbitrary initial values satisfy

The interconnection topology of the multi-agent system (1) is usually described as a digraph. Each agent is considered as a node, while an information flow between neighbouring agents is regarded as a directed edge.
A digraph
If there is a path in
For the first-order multi-agent system (1), the usual consensus algorithm is given by

where κ > 0, Ni denotes the agent i’s neighbours, and aij > 0 is the adjacency element of A in the digraph

which is regarded as the linearized model of Kuramoto oscillators (Izhikevich and Kuramoto, 2006) when the errors between neighbouring oscillators approach zero; however, consensus seeking on
Different to the existing adaptive consensus algorithms, where the coupling weights are subjected to adaptive rules (Li et al., 2013), we design a new consensus algorithm by adding an adaptive variable plus the usual consensus algorithm (2) as follows
where κ > 0, γ > 0, aij > 0, j ∈ Ni and zi is an added variable. The algorithm (4) requires that each agent’s nominal velocity is known and transmitted to its neighbours together with the adaptive variable.
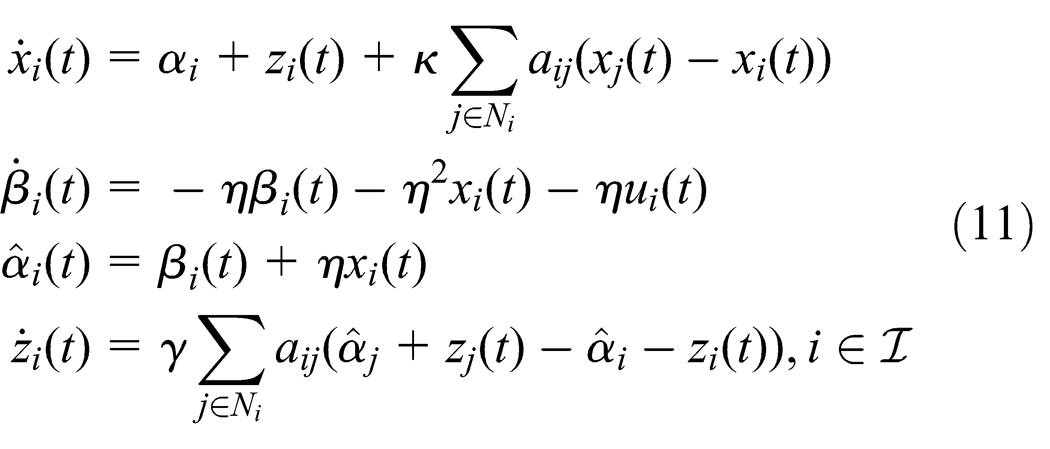
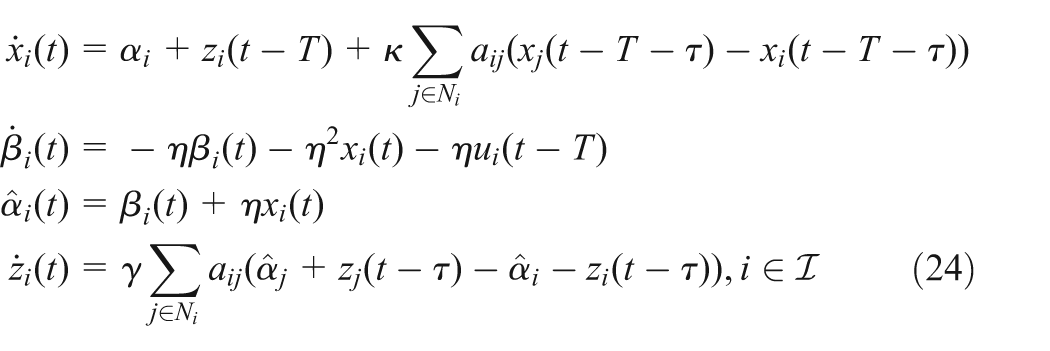
For linear time-invariant multi-agent systems, the design concept of decentralized observers has been widely adopted to estimate unknown variables (Li et al., 2011). When αi in equation (1) is unknown, we modify the consensus algorithm (4) by introducing a parameter estimator, as defined in Wu and Lu (2003), for each agent by using the agent’s self input and output
where κ > 0, γ > 0, η > 0, aij > 0, j ∈ Ni, and
Besides equations (4) and (5), the dynamics of the adaptive variable are also determined by the coordination control parts of agents’ states
where κ > 0, γ > 0, aij > 0 and j ∈ Ni.
In addition, we make the following assumption on the interconnection topology.
Under Assumption 1, we obtain that zero is a simple eigenvalue of L, i.e. rank (L) = n − 1 and the other eigenvalues all have positive real parts (Lin et al., 2005). Moreover, the eigenvalues of L are denoted as
Consensus analysis
Consensus algorithm without time delay
Firstly, we analyse the consensus criterion for multi-agent system (1) under (4)

where x = [x1,x2,…,xn] T , v = [v1,v2,…,vn] T and vi = αi+zi. Evidently, the characteristic equation of system (8) is given as

i.e.

Under Assumption 1, equation (9) has two roots at s = 0 whose geometric multiplicity is one and the other roots of equation (9) which have negative real parts. Since

where C = [c,…,c] T , C2 = [c21,…,c2n] T and C3 = [c31,…,c3n] T . Since equation (10) holds for arbitrary t, we get LC2 = 0 and LC3 = 0, i.e. C2 = [c2,c2,…,c2] T and C3 = [c3,c3,…,c3] T ; hence, the agents (7) converge to a consensus asymptotically.
Then, the closed-loop system of (1) and (5) is given by
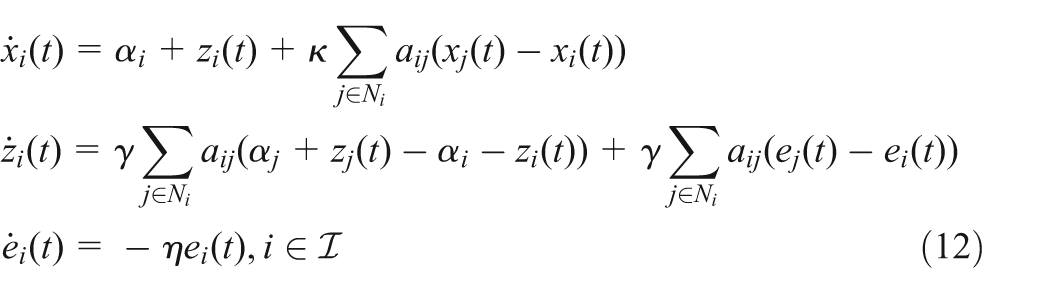
The system (12) is reformulated in a multi-variable form as
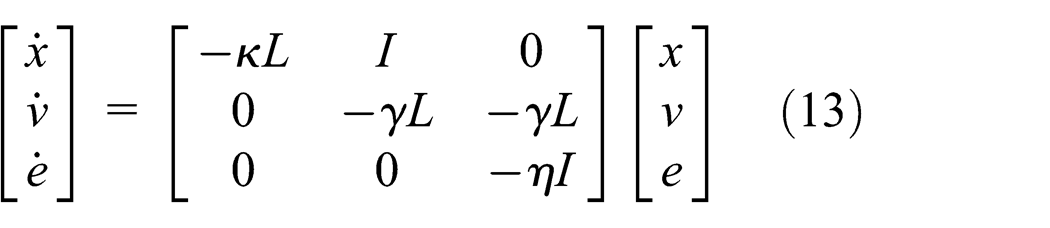
where x = [x1,x2,…,xn] T , e = [e1,e2,…,en] T , v = [v1,v2,…,vn] T and vi = αi+zi. Then, the characteristic equation of system (13) is given by
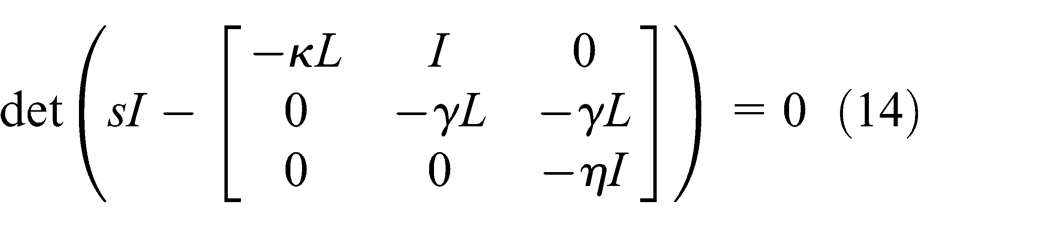
i.e.

Using Assumption 1, the roots of equation (14) lie in the open left half of the complex plane, except for two roots at s = 0 whose geometric multiplicity is one. Similar to the proof of Theorem 1, we prove that
Finally, the closed-loop form of (1) with (6) is formulated as
Before presenting our result, we first introduce the following useful lemma.

where ξ1, δ1, ξ2 and δ2 are real constants. Then, the equation has its roots on the open left half of the complex plane if and only if

and

hold simultaneously.

where λi,i = 2,…,n, are the non-zero eigenvalues of L.

where x = [x1,x2,…,xn] T , v = [v1,v2,…,vn] T and vi = αi+zi. By taking Laplace transforms, the characteristic equation of system (17) about x is given by

Under Assumption 1, equation (19) is equivalent to

Thus, it is easily proved from Lemma 1 that if and only if (17) holds the roots of equation (19) all lie in the open left half of the complex plane, except for two roots at s = 0, of which the geometric multiplicity is one. Thus, we obtain limt→∞xi = di0t+di1 and limt→∞vi = di2t+di3, where d0i ∈ R,d1i ∈ R,d2i ∈ R,d3i ∈ R. From equation (18), we get
where D0 = [d01,…,d0n] T , D1 = [d11,…,d1n] T , D2 = [d21,…,d2n] T and D3 = [d31,…,d3n] T . Since the above equations hold for arbitrary t, we prove that D2 = 0, D0 = D3 = [d0,d0,…,d0] T and D1 = [d1,d1,…,d1] T ; hence, the agents in equation (16) converge to a consensus asymptotically.
Consensus algorithm with time delays
In this section, we analyse the delay effect of our proposed algorithms with identical input delay and communication delay. Obviously, algorithms (4) and (5) have the same delay robustness for the separation principle. From Remark 3, we intuitively conclude that algorithm (6) bears smaller time delay than algorithms (4) and (5).
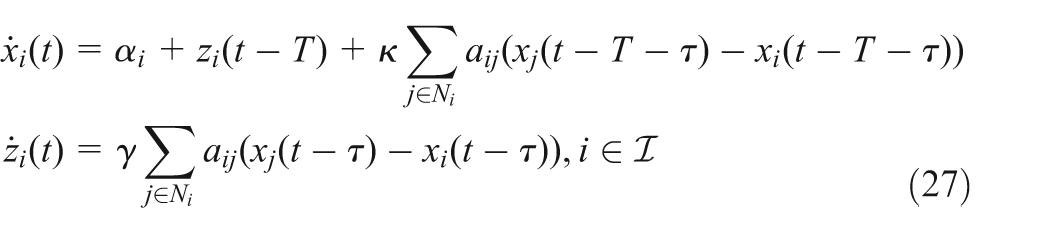
The dynamics of the agents in equation (7) under time delays are given by
where T > 0 and τ > 0 are the input and communication delay, respectively.

and

where λi,i = 2,…,n, are the non-zero eigenvalues of L.
where x = [x1,x2,…,xn] T , v = [v1,v2,…,vn] T and vi = αi+zi. Evidently, the characteristic equation of system (23) is given by
i.e.

which equals

or

Hence, under Assumption 1, Theorem 4 is proved in the same way as in Liu and Tian (2008, Theorem 1).
The multi-agent system (11) under time delays becomes
According to Remark 2, we obtain the following consensus criterion for system (24).

and

where λi,i = 2,…,n, are the non-zero eigenvalues of L.
With time delays, the multi-agent system (16) becomes

where 0 ≤ φi1 < 2π, which satisfies
and λi,i = 2,…,n, are the non-zero eigenvalues of Laplacian matrix L.
where x = [x1,x2,…,xn] T , v = [v1,v2,…,vn] T and vi = αi+zi, and the characteristic equation of system (29) is given by
i.e.

which is equivalent to

Obviously, equation (30) is the characteristic equation of the homogeneous second-order multi-agent system under the dynamical consensus algorithm, which is composed of the agents’ position and velocity coordination control parts, under identical input delay or identical communication delay in synchronously coupled form (Yu et al., 2010). Hence, from Yu et al. (2010, Theorem 2), the roots of equation (30) lie on the open left half of the complex plane except for two roots at s = 0, whose geometric multiplicity is one, if and only if equation (28) holds. The proof of Theorem 6 is now complete.
Simulation
Consider a multi-agent network of six agents given by equation (1), and the interconnection topology is described in Figure 1. Obviously, the topology has more than one globally reachable node, and the edges’ weights are a12 = 0.4, a23 = 0.3, a25 = 0.5, a34 = 0.6, a42 = 0.7, a54 = 1.1, a56 = 1.2 and a61 = 0.6. For the diverse first-order agents in equation (1), nominal velocities are chosen as a1 = 0.7, a2 = −1.0, a3 = 0.1, a4 = 1.4, a5 = 0.3 and a6 = 0.5. By computation, the eigenvalues of Laplacian matrix are: λ1 = 0, λ2 = 2.1487, λ3 = 1.0711+j0.3394, λ4 = 1.0711 − j0.3394, λ5 = 0.5092 and λ6 = 0.6. In addition, we choose κ = 3.5 and γ = 1 for our three proposed consensus algorithms.
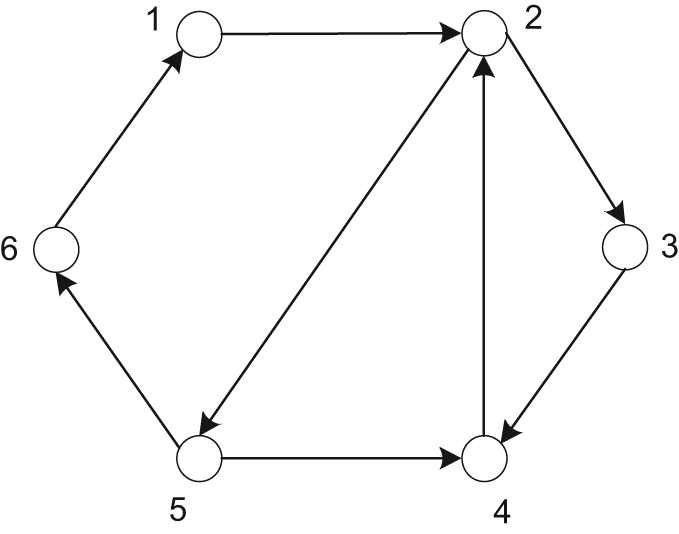
Interconnection topology of six agents.
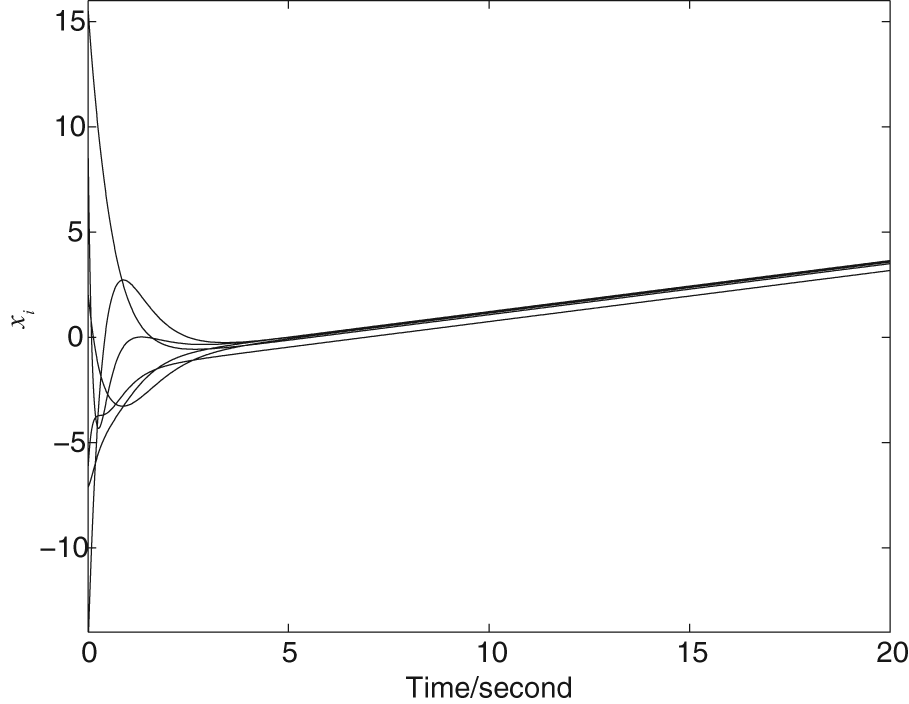
Firstly, we illustrate that the agents in equation (3) under the usual consensus algorithm (2) with κ = 3.5 and γ = 1 cannot achieve asymptotic consensus (see Figure 2), but the multi-agent system (7) converges to a consensus asymptotically (see Figure 3). With κ = 3.5 and γ = 1, moreover, the multi-agent system (12) under stable estimators with η = 1 reaches an asymptotic consensus, and the estimation also converges to the corresponding agent’s nominal velocity (see Figure 4). With κ = 3.5 and γ = 1, the inequality (17) holds, so the agents in equation (16) converge to a consensus asymptotically (see Figure 5); however, condition (17) cannot hold for arbitrary positive control parameters κ and γ, and Figure 6 shows that the agents in system (16) diverged when κ = 3.5 and γ = 150.
Agents’ states under the usual consensus algorithm without the adaptive variable.
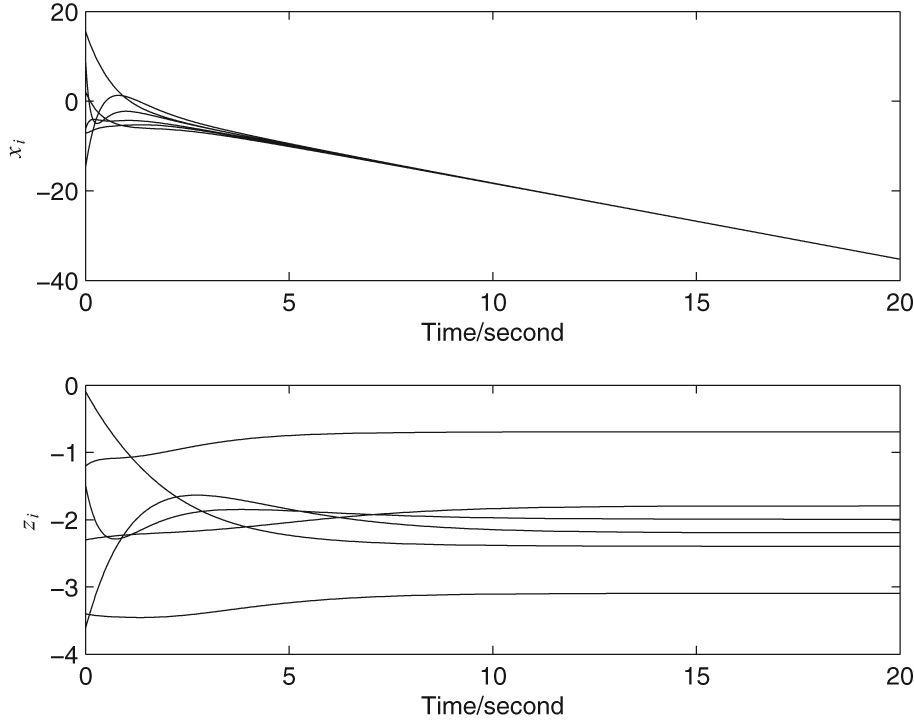
Consensus convergence of agents’ states and trajectories of adaptive variables for system (7).
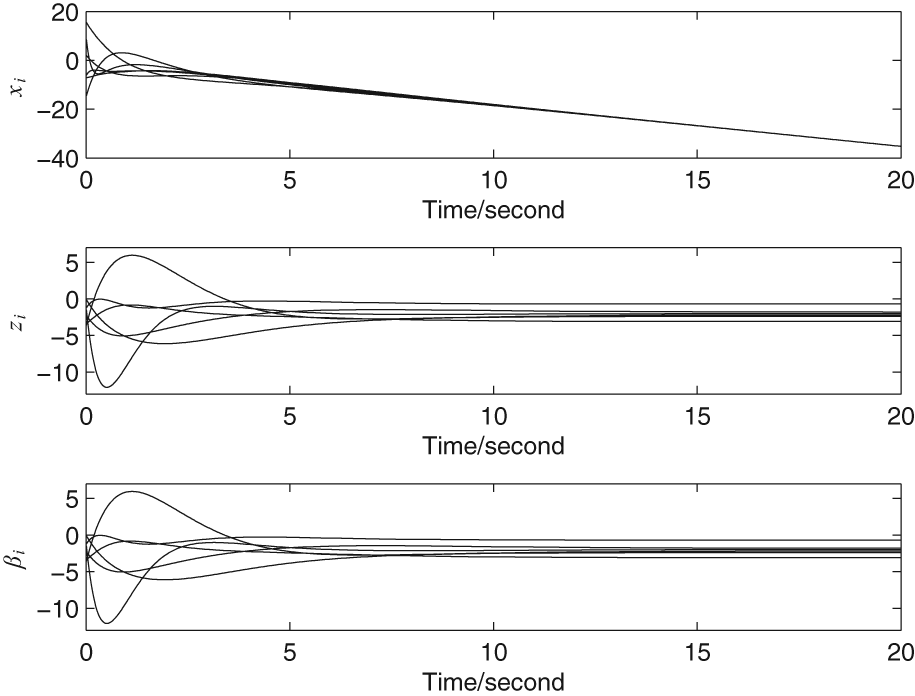
States consensus convergence and trajectories of adaptive variables and parameters estimations for system (11).
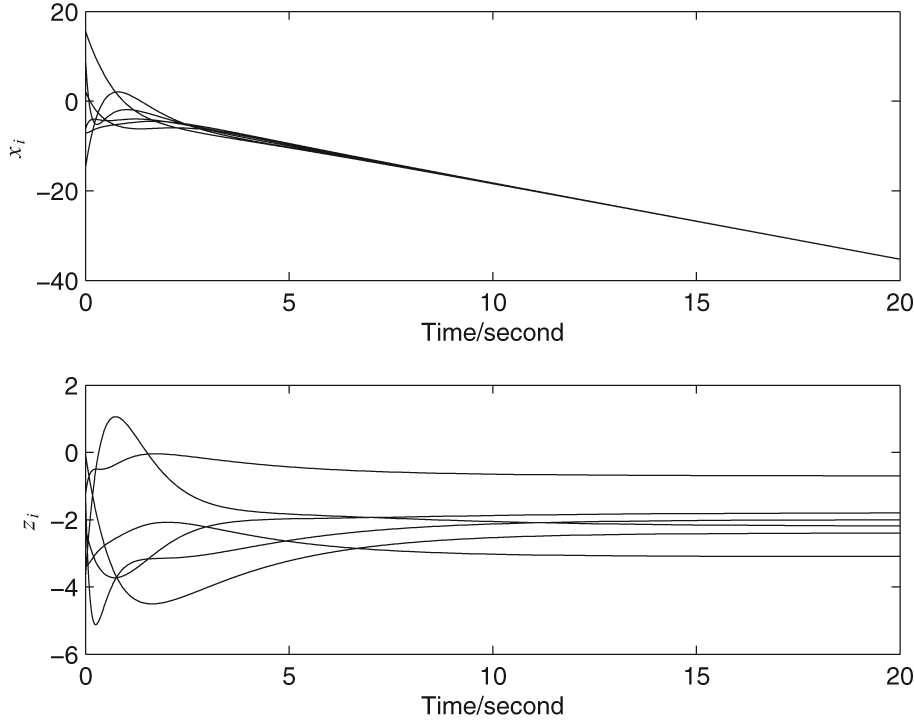
Consensus convergence of agents’ states and trajectories of adaptive variables for system (16).
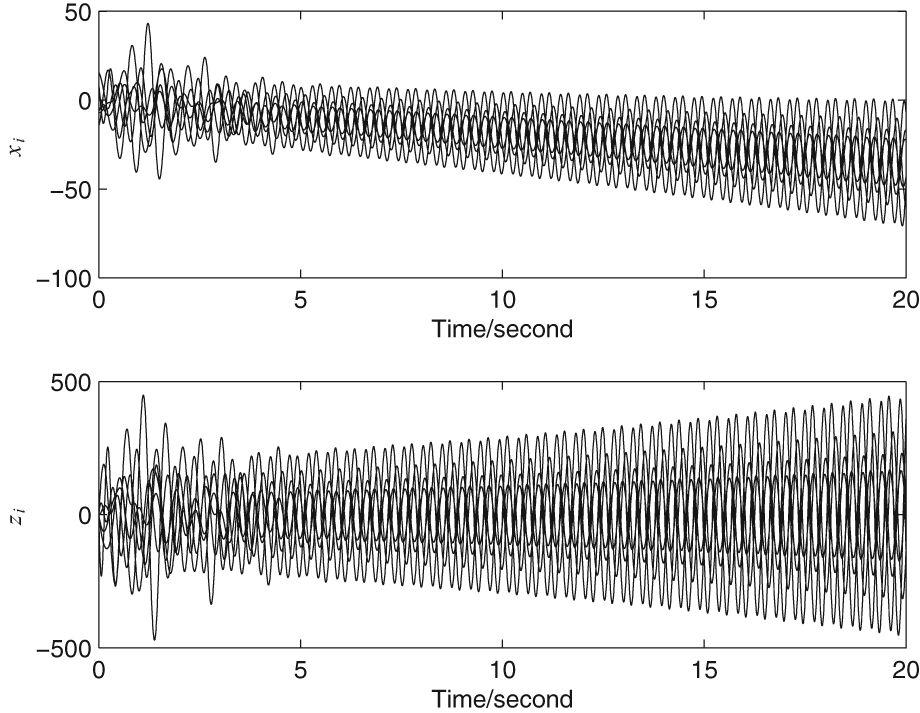
Divergence of agents’ states and adaptive variables for system (16).
Then, we compute the delay bound of our proposed algorithms with the same interconnection topology and coupling weights as above. With κ = 3.5, γ = 1 and η = 1, the delay bounds of systems (20) and (24) are given by T+τ < 0.2089 s, from Theorems 4 and 5. Additionally, the delay bound of system (27) is T+τ < 0.2037 s from Theorem 6.
Conclusion
In this paper we have proposed three adaptive consensus algorithms to solve the consensus problem of heterogeneous first-order multi-agent systems with diverse nominal velocities. The first algorithm is constructed by introducing an adaptive variable, which is determined by the errors of neighbouring agents’ nominal velocities accompanied with the adaptive variables, into the usual consensus algorithm with an assumption that the nominal velocities are measured and exchanged between neighbouring agents. When the nominal velocity of each agent cannot be detected, the second algorithm is designed by introducing a parameter estimator of nominal velocity to the first algorithm. An adaptive variable of the last algorithm is determined by the errors of neighbouring agents’ states. Consensus criteria are obtained for our three algorithms under fixed interconnection topology, and the delay-dependent consensus criteria are also presented for the three algorithms in synchronously coupled form under identical input and communication delay. Although our main results have been obtained by directly referring to recent literature, the consensus algorithms in this paper show a new design idea of the adaptive consensus algorithm for solving the consensus problem of heterogeneous multi-agent systems.
Footnotes
Funding
This work was supported by the National Natural Science Foundation of China (grant numbers 61473138, 61104092 and 61134007), the Fundamental Research Funds for the Central Universities (grant number JUSRP51407B) and the Priority Academic Program Development of Jiangsu Higher Education Institutions (grant number)