
Abstract
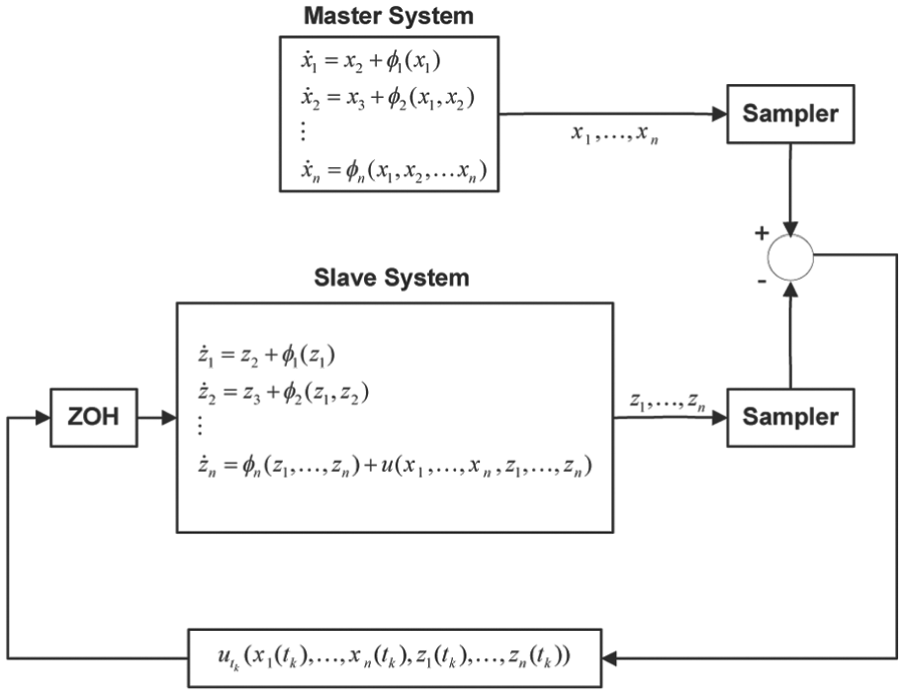
In this paper, we investigate the problem of using sampled-data feedback to synchronize a slave (driven) system with a master (driver) system. Based on the domination approach, both state-feedback and output-feedback control methods using sampled-data are proposed to make the tracking error converge to zero. The problem is of practical importance since in practice the system state is transmitted as sampled signal, and very often only the output is measurable. The effectiveness of the proposed approach is illustrated by the simulation for a chaotic Chua oscillator.
Introduction
The history of the analysis of synchronization phenomena can be traced back to the finding of Huygens that two very weakly coupled pendulum clocks (hanging at the same beam) become synchronized in phase (Boccaletti et al., 2002). Other early examples include the synchronized lightning of fireflies and the peculiarities of adjacent organ pipes (Blekhman, 1988). In recent years, increasing attention has been paid to the study of synchronization between systems due to its useful applications in secure communication, biological systems, information processing and chemical reactions. The basic idea of synchronization is to design a suitable controller for the slave (driven) system so that the states of the slave system can track the states of the master (driver) system. The synchronization problem has been well-studied under various conditions and some effective approaches have been proposed, for instance, feedback control in Huang et al. (2009, 2012), adaptive control in Hu and Xu (2008), Elabbasy et al. (2006) and Wei et al. (2014a), impulsive control in Yang and Chua (1997) and Liu (2001), fuzzy logic control in Li and Ge (2011), and intermittent control in Huang and Li (2010).
Most of the results mentioned above focus on the controllers using continuous signal. In practice, however, more and more controllers are being implemented using digital computers, which necessitates the investigation of sampled-data systems, as mentioned in Åström and Wittenmark (2011) and Gyurkovics and Elaiw (2004). Compared with the tremendous results achieved for non-linear systems under a continuous-time controller, there are relatively few works on designing sampled-data ones. Recently, the problem of non-linear system stabilization using sample-data controller was studied in Qian and Du (2012) and Ahrens et al. (2009), and some results for discrete-time systems have been reported by Liu et al. (2012) and Yang and Chen (2002). A hybrid system method was employed in Nešic et al. (2009), showing that global stability of the closed-loop system using a sampled-data output-feedback stabilizer could be guaranteed. For linear systems, since a sampled linear continuous-time system is equivalent to a linear discrete-time system, the stabilization problems can be easily solved, but it is not a trivial problem for non-linear systems. In the case when full-states are not available, the global output-feedback stabilization problem of non-linear systems is a challenging one even in the case of using continuous-time feedback. There are fewer results available for the output-feedback stabilization problem of non-linear systems using discrete-time feedback (Ahrens et al., 2009; Chai and Qian, 2014; Khalil, 2004). Another useful method based on adaptive fuzzy design has been used for systems with backlash, dead-zones, and unknown dynamics (Liu and Tong, 2014, 2015a,b).
An interesting problem is to design a sampled-data controller to achieve synchronization for a more general class of non-linear systems. The problem of sampled-data synchronization has been discussed in previous work based on linear matrix inequalities. For instance, a set of sampled-data synchronization controllers were designed for a class of dynamical networks in Shen et al. (2012) and a sampled-data control approach was proposed for the synchronization of chaotic Lur’e systems in Wu et al. (2013).
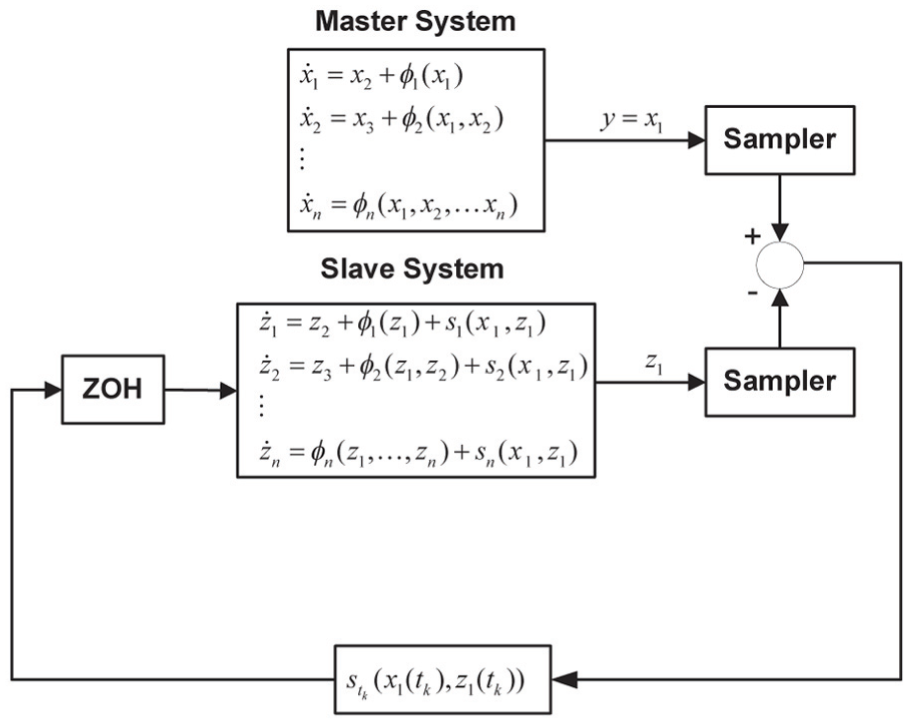
In this paper, the domination approach will be applied to solve the problem of global asymptotic sampled-data synchronization. We consider a class of master (driver) systems in the lower-triangular form, which has been widely discussed in the literature (Isidori, 1995)
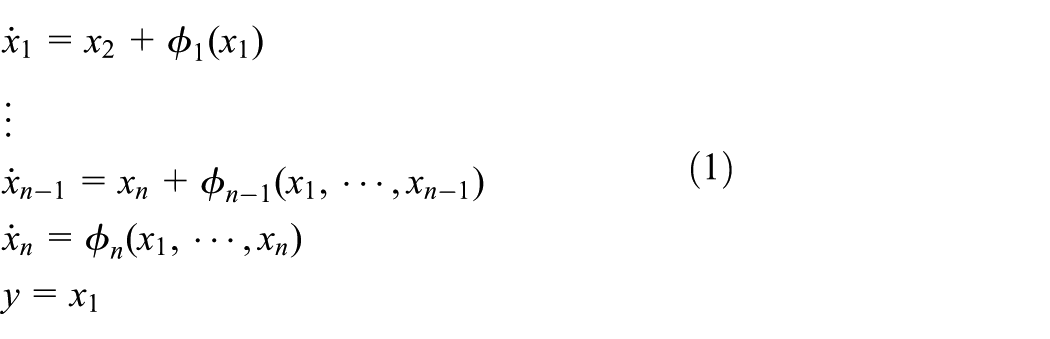
where
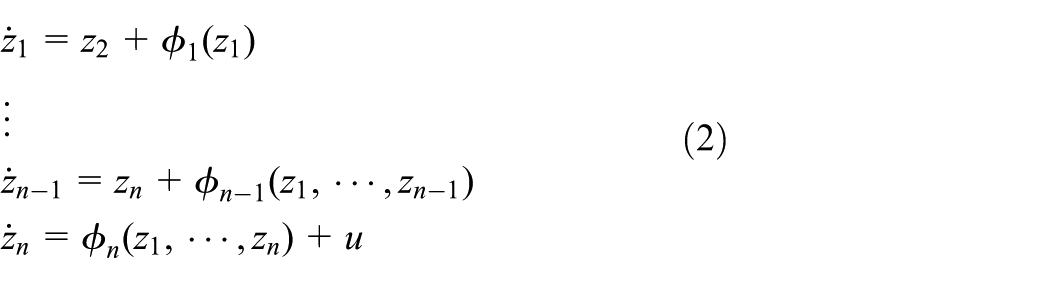
where
Asymptotic synchronization with sampled-data state-feedback control.
where
Asymptotic synchronization with sampled-data output-feedback control.
The main contributions of this paper are as follows.
In practice, continuous-time controllers are not available, and even the intermittent controllers are not always applicable. On this note, sampled-data controllers are designed to solve the synchronization problems.
We prove that a globally stabilizing output-feedback controller exists and can be designed for the non-linear systems under a general condition.
The domination approach is successfully applied to construct controllers which are linear and easy to implement.
The rest of this paper is organized as follows. First, we construct a linear sampled-data state-feedback controller to ensure the asymptotic convergence of synchronization error. After that, we design a series of sampled-data inputs to achieve asymptotic synchronization. Our conclusion is given in the last section.
Linear sampled-data state-feedback for synchronization
In this section, we will design a state-feedback controller for the slave system (2) to track the states of system (1). In Huang and Li (2010), the intermittent feedback method is applied to the synchronization of systems. In order to achieve synchronization, a series of sampled-data state inputs from the master system is used, and three parameters need to be determined. Compared with Huang and Li (2010), we use sampled-data state-feedback control instead of an intermittent feedback method, so only two parameters need to be chosen during the design process. Moreover, the state-feedback controller we design will be implemented on the last dynamic
Linear continuous-time state-feedback control for synchronization
First, we design a continuous-time controller for the slave system (2), which will be a discrete-time case by using sampled-data control. To achieve our control objective, we assume that the non-linearity satisfies the following condition.

The above Lipschitz condition is a common assumption for output-feedback stabilization which has been used in existing work, e.g. Khalil and Saberi (1987) and Gauthier et al. (1992).

where
By introducing the change of coordinates
where
Noting that equation (7) can be rewritten in the following form

where

By Assumption 1, one obtains, for
Then we can achieve
It is not hard to see that there exists a constant

where
By the selection of K,

Now we construct a positive definite Lyapunov function

With the help of equations (7) and (11), we evaluate and estimate the derivative of
Obviously, a large enough gain

which implies that the two systems (1) and (2) synchronize asymptotically.
Linear sampled-data state-feedback control for synchronization
Now we consider the case of using sampled-data control inputs for the slave system (2).
Consequently, the error dynamics equation (7) becomes
and the derivative of Lyapunov function

By Assumption 1, we can see that
With the aid of Lemma 1 (Appendix 1), we have

where
Substituting equation (21) into equation (19), we get
Clearly, for a fixed
We can conclude that the states of system (2) will asymptotically track the states of system (1) by using the sample-data state-feedback controller (16).
An example
In this section, we will study numerically the synchronization for the original Chua oscillators by applying the theory presented in the previous section. The chaotic synchronization problem has been well-studied under various conditions and some effective approaches have been proposed in recent years (Huang et al., 2012; Huang and Li, 2010; Wang et al., 2010; Wei et al., 2014a,b,c,d,e,f, 2015). As a class of chaotic system, the Chua oscillators intrinsically defy synchronization, because even two identical systems starting from slightly different initial conditions would evolve in time in an unsynchronized manner (the differences in the system states could grow exponentially) (Boccaletti et al., 2002).
The Chua oscillator is given as

where

with
Under the new coordinates

It’s not hard to see that the above system is in the same form as system (1),

with
In the following simulation, we choose
From Figure 3, it can be seen that the slave system can synchronize with the master system by using the proposed sampled-data state-feedback controller. Figure 4 shows that by applying the same controller, synchronization can be achieved under different sampling periods.
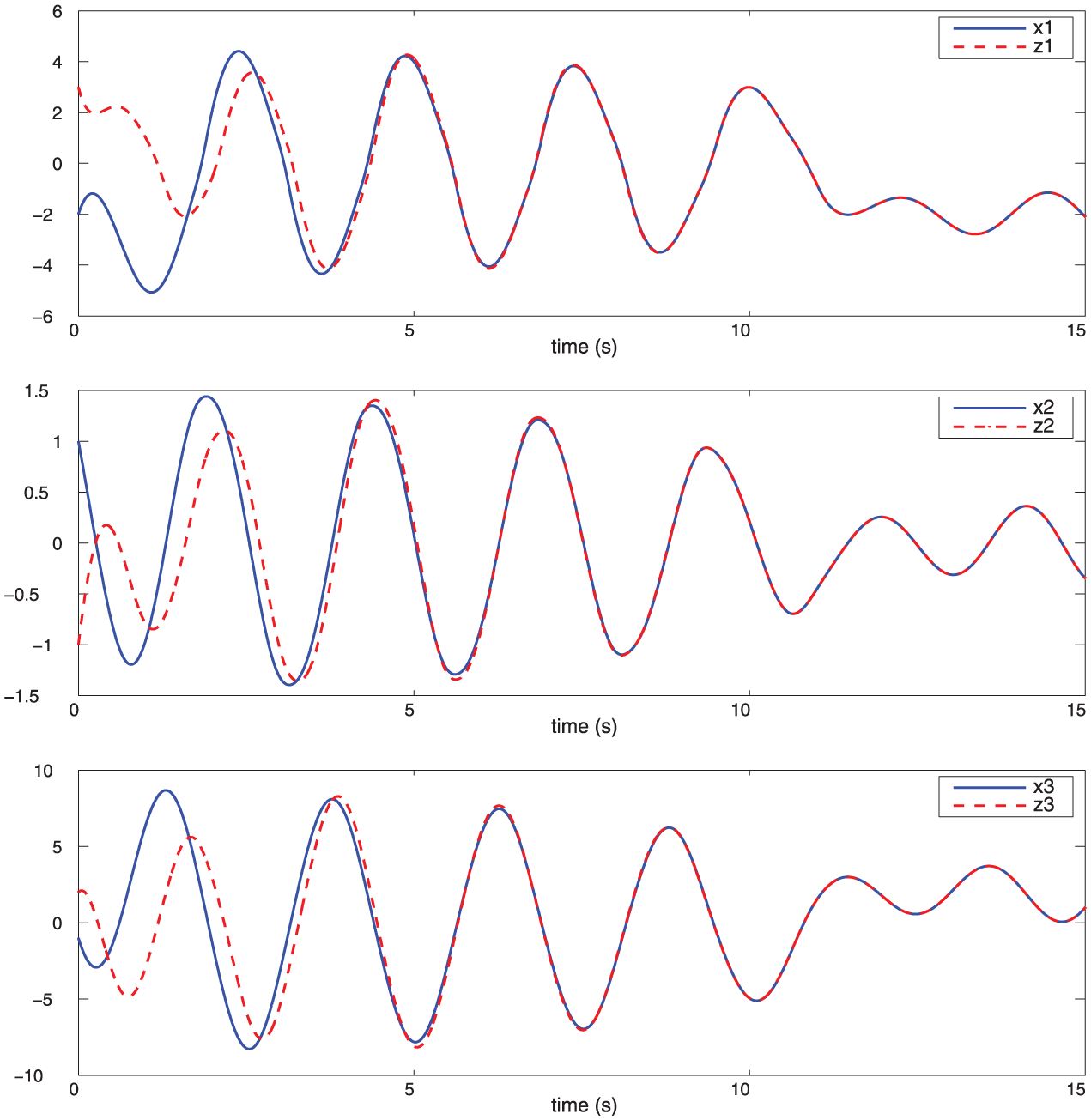
The two Chua systems synchronize under sampled-data state-feedback.
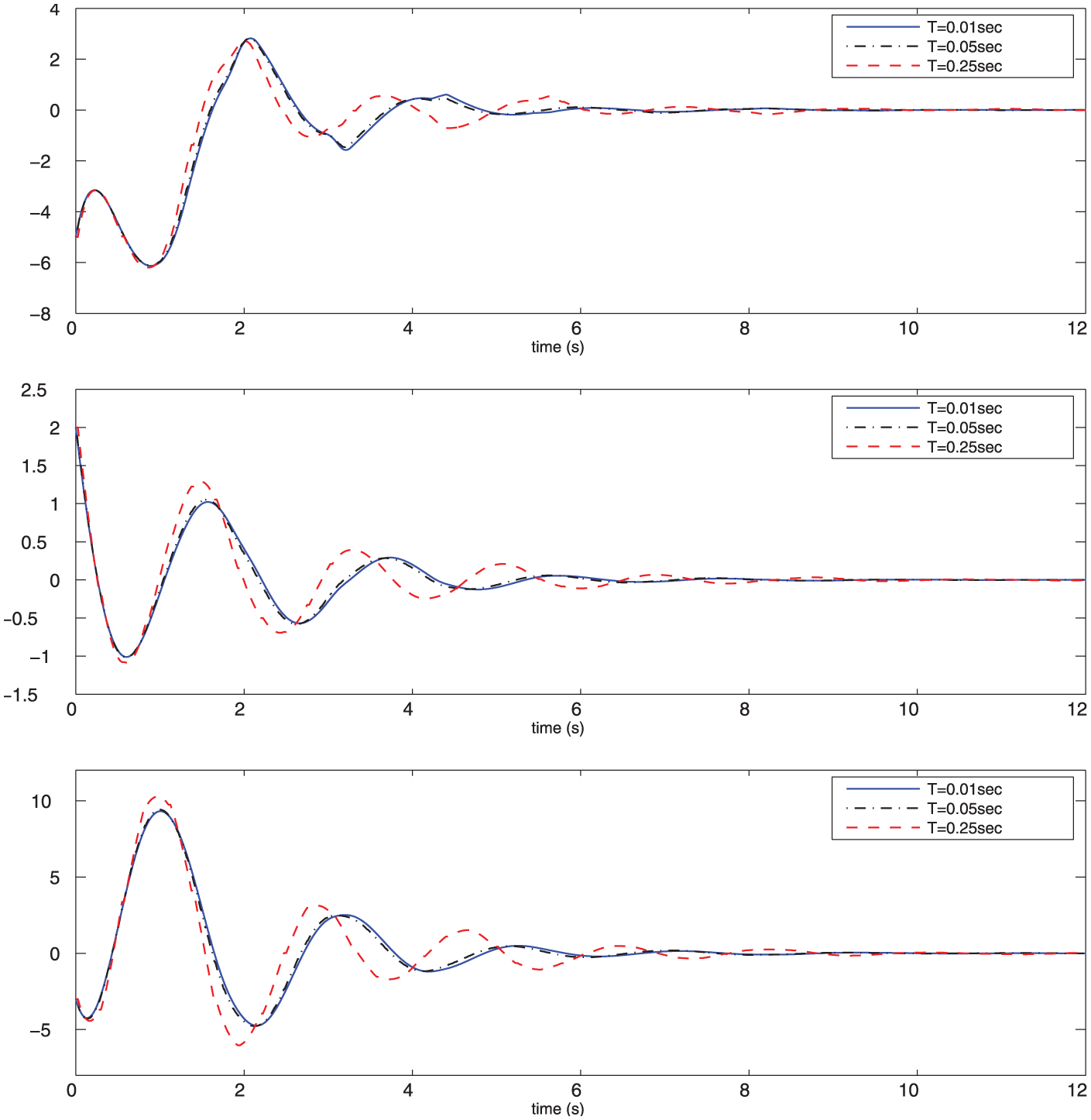
The tracking errors under different sampling periods.
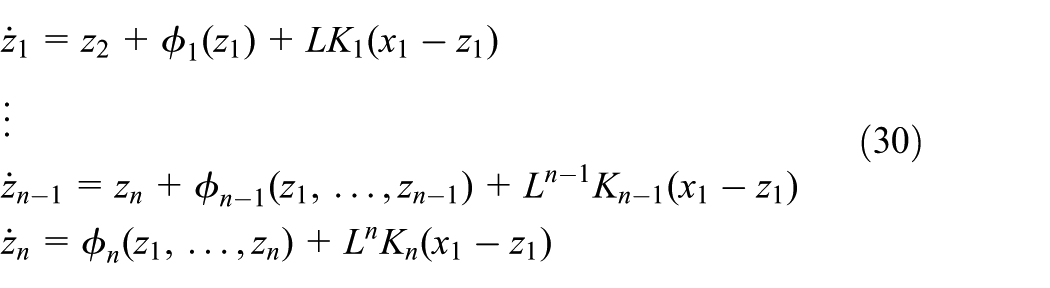
Linear sampled-data output-feedback for synchronization
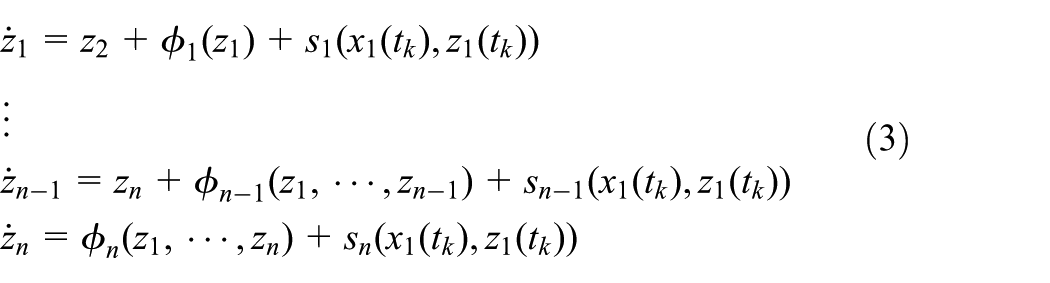
In this section, we will develop a series of sampled-data inputs
Linear continuous-time output-feedback control for synchronization
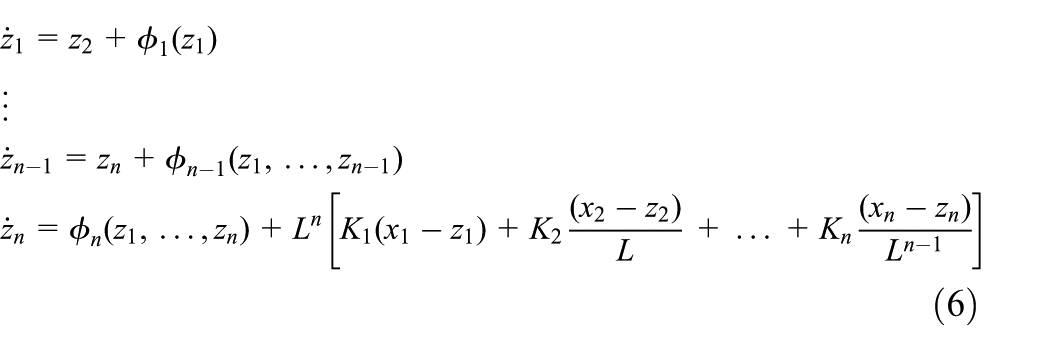
First, we design the continuous-time control inputs for the slave system (3).

where
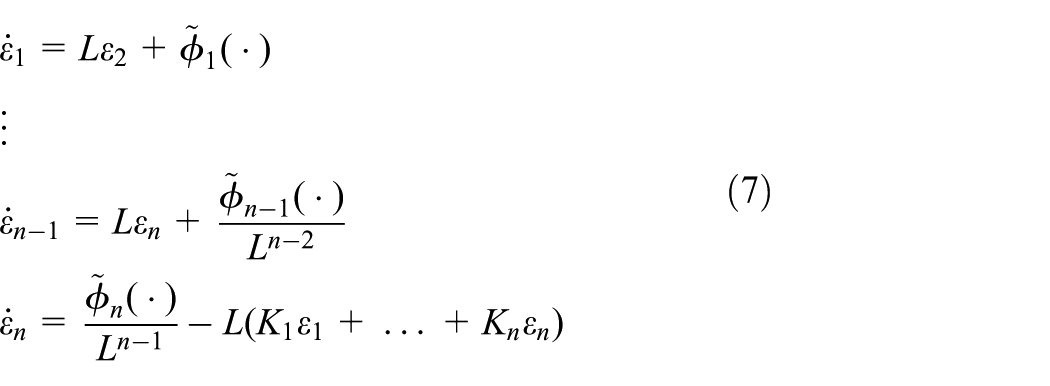
By introducing the change of coordinates
where

where A,
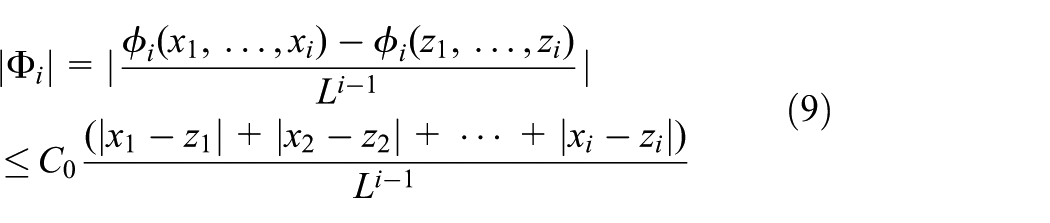
By Assumption 1, there exists a constant

There exist gains Ki’s such that

Now we define a positive definite Lyapunov function

With the help of equations (31) and (33), we evaluate and estimate the derivative of
Obviously, a large enough gain L yields

Therefore, it can be concluded that the two systems synchronize asymptotically.
Linear sampled-data output-feedback control for synchronization
Now we consider the case of using sampled-data control inputs for the slave system (3).

where
and the error dynamics (31) become
which can be written in the following form

The derivative of Lyapunov function
Noting that
by Lemma 1 (Appendix 1), we have

where

Substituting equation (44) into equation (42), we arrive at

It is not hard to see that a large enough L and a small enough T can yield

Then, we can conclude that system (1) is synchronized with system (3) by the sample-data inputs (38) in discrete-time.
An example
In this section, the Chua oscillator has been used again to verify the proposed theorem. From Theorem 4, a slave system with sampled-data inputs can be designed as
For the purpose of simulation, the initial conditions are set to be
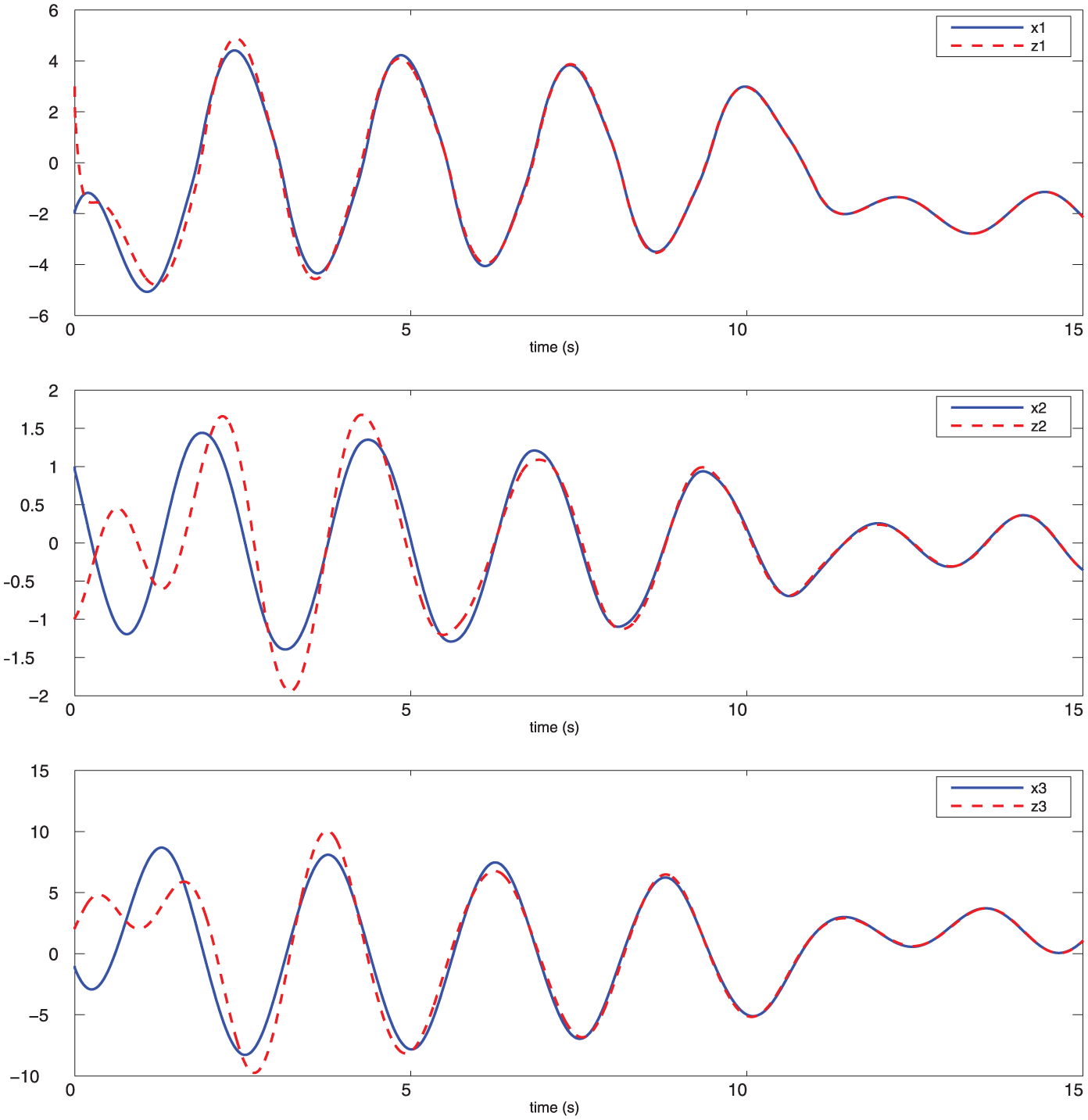
The two Chua systems synchronize under the sampled-data output-feedback.
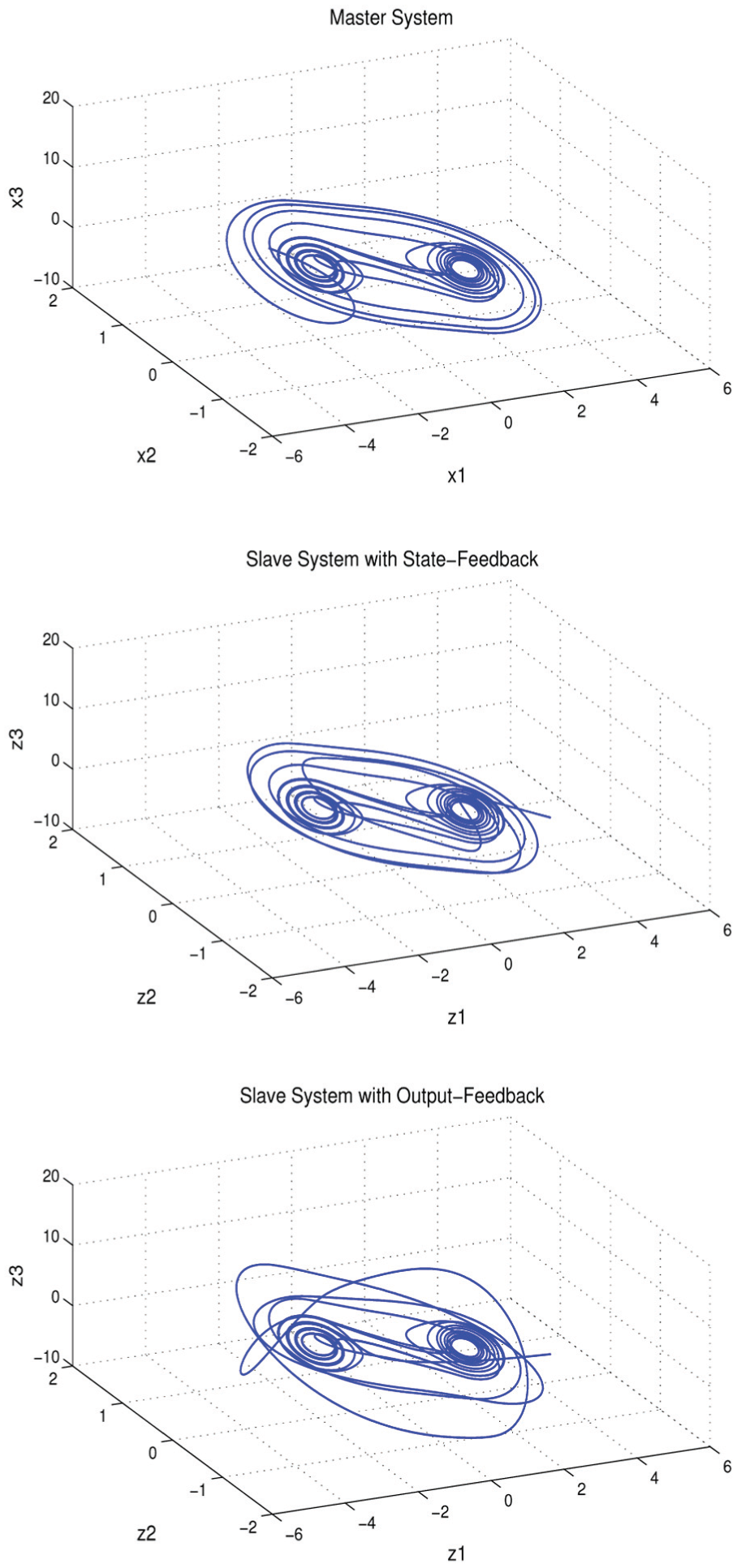
The two Chua systems synchronize under sampled-data feedback (three-dimensional).
The results imply that by applying the proposed sampled-data output-feedback, the slave system can synchronize with the master system.
Conclusion
In this paper, we first show that under a certain condition, a linear sampled-data state-feedback controller can be designed for a class of non-linear systems to guarantee that the master system and slave system synchronize in a period. Then, by carefully choosing the sampling period, a series of sampled-data inputs are designed to achieve synchronization. During the design process, we construct a Lyapunov function for the synchronization error dynamics and prove that the dynamics are asymptotically stable after implementing the designed control laws. Numerical simulations of Chua systems are performed to illustrate that the problem of synchronization can be solved under the proposed control methods.
Footnotes
Appendix 1
satisfies
where
It is straightforward to see that
which implies
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by a NPRP grant from the Qatar National Research Fund (grant number 4-1162-1-181) and the National Natural Science Foundation of China (grant number 61374038).