This paper investigates the quasi-synchronization problem for a class of heterogeneous dynamical networks based on a non-fragile memory sampled-data controller. Considering the effect of controller gain fluctuation and communication delay, a sampled-data control scheme with norm-bounded uncertainty and a constant signal transmission delay is designed. By introducing a leader, the heterogeneous complex delayed networks can be transformed into the corresponding error systems with bounded disturbances. A sufficient criterion to ensure that the error system can be exponentially stable and converge to a bounded region is established by the Lyapunov-Krasovskii function approach. Based on the criterion, the sampled-data control gain matrix is designed. Finally, the numerical examples are presented to illustrate the effectiveness of the theoretical results in this paper.
As is well known, with the development of communication networks and digital computing technology, the digital devices gradually tend to replace the continuous-time devices in many real applications. This allows the control of systems only to use the sampling values of the signal at discrete instants. This method may strongly enhance the network bandwidth service and reduces the amount of information transmitted in the system. It is more efficient and useful in real-life applications to use this method, which is considered to be the sampled-data control system. On the other hand, we know that the time delay occurs commonly in many physical systems, and the existence of time delay will reduce the performance of the system, and even cause system oscillation and instability. Thus, the synchronization problem of complex dynamical networks with time delay has raised considerable concern in recent years. In fact, the sampled-data control for complex networks with time delay have been reported in Lu et al. (2020); Wang and Tian (2019); Wang et al. (2020); Liu and Su, (2019); and Que et al. (2019). Lu et al. (2020) studied the output synchronization of the directed coupled reaction-diffusion neural networks with mixed delays. Wang and Tian (2019) studied the problem of stability of inertial neural network with time-varying delays under sampled-data control. In order to deal with the stability of sampling system, the input delay method is proposed. Using the Lyapunov function method, sufficient conditions for the global stability of the system are proposed. Wang et al. (2020) investigated the intermittent containment control problem of second-order multi-agent systems with sampled position data. A necessary and sufficient condition depending upon the coupling strengths, the spectrum of the Laplacian matrix, the communication width, the sampling period, and the time delay, is derived for achieving second-order intermittent containment control. Liu and Su (2019) studied containment control for second-order multi-agent systems via intermittent sampled position data communication. For the proposed protocols with and without time delay, some sufficient conditions are obtained to achieve containment. Que et al. (2019) considered discrete time communication unit and time delay and proposed a new criterion for globally exponentially synchronization of complex networks. Using the Lyapunov function approach to prove the the validity of the criterion.
In fact, communication delays always exist in the real physical systems, which may lead to difficulties in realizing synchronization. Therefore, in order to weaken the effect of time delay fluctuation in a general class of complex dynamical systems, memory sampled-data is investigated. Actually, memory sampled-data control, which means that the updating signal successfully transmitted from the sampler to the controller and the zero-order-holder at the instant has experienced a constant signal transmission delay , has been widely used in Wang et al. (2019); Yuan et al. (2018); and Luo et al. (2020). In addition, generally speaking, an inherent assumption in control design is that the controller should be implemented precisely. However, in fact, the precisely implemented controller strives to meet the practical requirements, in many industrial applications, it was inevitable that the controller has inaccuracy and uncertainty characteristics. This uncertainty can be ascribed to many factors, particularly unexpected errors occurred during the implementation of the controller, for example the process of converting an analog signal to a digital signal, round-off errors in numerical calculation and the different degrees of aging of components. The uncertainty in the controller implementation also leads to the deterioration or even instability of the closed-loop system performance. Therefore, non-fragile control methods takes into account the uncertainty in controller implementation have been studied in Shi et al. (2020); Zhang et al. (2018); Liu et al. (2018); and Ge et al. (2018). Liu et al. (2018) considered non-fragile exponential synchronization of delayed complex dynamical networks with memory sampled-data control. Based on Lyapunov function method, using integral theory, and applying the convex combination technique, a sufficient condition for non-fragile exponential stability of error system is proposed. Ge et al. (2018) considered the consensus tracking problem for the multi-agent system based on a non-fragile memory sampled-data controller. By introducing an improved Lyapunov-Krasovskii functional and making use of free-matrix-based integral inequality, some sufficient criteria are given to ensure the consistency of the multi-agent system.
However, the above literatures are devoted to the research of synchronization of homogeneous networks; that is, all the agents have identical dynamics. Actually, in practical applications, factors such as external interference, system mutation, parameter uncertainty, and individual differences may cause networks system heterogeneity. Different from synchronization in homogeneous dynamical networks, it is difficult to analyze synchronization in heterogeneous complex networks because heterogeneous agents have different self-dynamics. Moreover, complex networks with nonidentical nodes are more common than homogeneous cases in real situations. Therefore, it is necessary and meaningful to study the synchronization of heterogeneous networks. So far, a few works have studied the synchronization problem of heterogeneous complex networks. Yang et al. (2019) considered the problem of quasi-synchronization of heterogeneous networks with sampled-data control quantization control and input saturation. Based on the Lyapunov functional approach and the integral inequality theory, the sufficient conditions for the error system to achieve quasi-synchronization are given. Wang et al. (2018) discussed the problem of consensus of heterogeneous nonlinear second-order multi-agent systems. Two sampling protocols with delay-free and input-delay are proposed, respectively. According to the Lyapunov stability theory and linear matrix inequality method, the sufficient conditions for achieving quasi-consensus of heterogeneous multi-agent systems are proposed.
Inspired by the above researches, we find that up to now there has been no research on non-fragile quasi-synchronization of heterogeneous complex delayed networks controlled by memory sampled-data, which is the motivation for this paper. Moreover, as opposed to the controller scheme proposed in Yang et al. (2019) and Wang et al. (2018), the sampled-data control we designed takes into account norm-bounded uncertainties and a constant signal transmission delay. Controller gain fluctuation, communication delay, and network heterogeneity may make synchronization difficult. Therefore, this paper investigates the non-fragile synchronization problem of nonlinear heterogeneous complex networks with delay based on a memory sampled-data controller. In this paper, by employing an augmented Lyapunov functional, the convex combination technique, and an improved inequality that can provide a more accurate upper bound than Jensen’s inequality for dealing with the cross-term, a sufficient criterion is derived, which can realize the quasi-synchronization for heterogeneous complex delayed networks. Based on the stability condition, we can design a control gain matrix. Furthermore, when the sampled-data controller is free norm-bound uncertainty, the sufficient conditions of sampled-data synchronization for heterogeneous complex delayed networks are concluded. Finally, the advantages of the proposed memory sampled-data control are proved by numerical simulation, the validity of the theoretical results are proved by numerical simulation, and the homogeneous networks can be synchronized to be verified by numerical simulation.
The structure of the article is as follows. In Section 2, we introduce some notations, graph theory, and lemmas related to this paper. In Section 3, a heterogeneous complex delayed network is proposed and an error system is established. In Section 4, we mainly introduce the main results of synchronization. In Section 5, the correctness of the theorem is proved by numerical simulation. Finally, we summarize the results of the research.
Notation: Throughout this paper, stands for n-dimensional real column vectors. represents the set of n-dimensional real square matrices. denotes the identity matrix with appropriate dimensions, and represents a zero matrix or a zero vector with appropriate dimension. represents a block-diagonal matrix. * denotes the elements below the main diagonal of a symmetric block matrix. ∥·∥ is used to represent the Euclidean norm for given vector. For a symmetric , the notation means that is positive definite. and stand for the maximum and minimum eigenvalues of . means the transpose of matrix . means the inverse of . Notation ⊗ indicates the Kronecker product.
Preliminaries
Graph theory
Let be a weighted directed graph, in which is the set of nodes, and is the set of edges. represents the adjacency matrix of graph with nonnegative elements . If can receive information from , we said , we have and otherwise. The Laplacian matrix of a graph corresponding to the adjacency matrix is defined by and , for . Suppose that is consisting of follower nodes and a leader node. Let represent the leader adjacency matrix. if and only if there is a directed path from the leader to the -th node, otherwise, . Define .
Related lemmas
Lemma 1: (Lower bounds lemma (Park et al., 2011)) Let : be in an open subset of . Then, the reciprocally convex combination of over satisfies
subject to
Lemma 2: (Seuret et al., 2013) For any positive definite matrix and continuously differentiable function in , we have
where
Lemma 3: (Liu and Fridman, 2012) Let and = 0. Then, for any matrix , the following inequality holds
Lemma 4: (Kim, 2016) Let us consider a quadratic function , where . If (i) , (ii) , (iii) then .
Remark 1: According to the proof in (Kim, 2016), we know that when , from (ii) and from (iii) guarantee that .
Problem formulations
Consider the following complex network that consists of nonidentical nodes of the form
where is the state vector of node . When holds at the initial condition. is a constant of time delay. is a nonlinear vector valued function of the node . , and are constant matrices. is the control protocol of the node .
To investigate the synchronization problem of heterogeneous network (1), this paper introduces a leader as a synchronization target. The dynamics of the leader is considered as follows
where is the state vector of the leader. is a nonlinear vector valued function of the leader. , and are constant matrices.
Remark 2: In reality, many factors will cause heterogeneity of the network, such as: external interference, individual difference, and so forth. Therefore, heterogeneous networks composed of nodes of different dynamic types are more common. Therefore, this paper is prompted to establish a heterogeneous complex network, that is, the dynamics function , matrices and of each node of the follower system are different. Moreover, the node dynamics function , the matrices and in the leader system are also different from each node in the follower system. So, in other words, the network coupled of N heterogeneous follower networks and the leader can be seen as a big heterogeneous network with nodes.
For the connectivity of graph , we will adopt the following assumption and definition:
Assumption 1: (Wang et al., 2018) The leader has a directed path to each follower.
Definition 1: (He et al., 2015) The nonlinear function satisfies Lipschitz condition, if there exist for any such that
Assumption 2: Assume that for , where
(1) satisfies Lipschitz condition,
(2), where .
Assumption 3: The state of the leader is bounded. There is a positive constant such that for any initial condition .
Remark 3: Assumption 1 is a necessary condition for synchronization of the networked system. By Assumption 1, the information can be transmitted from the leader to each of the followers through the directed path. Assumption 2 is an usual Lipschitz condition. In practical applications, the leader may be an equilibrium points, a periodic orbit, or a chaotic attractor, therefore, Assumption 3 is reasonable.
Throughout this paper, the control signal is deemed to be generated by using a zero-order-hold function. Then, the form of the non-fragile memory sampled-data feedback control is given as
where , is a set of hold times satisfying . Define as the sampling internal, is the maximum sampling internal, which is assumed to be aperiodic and satisfying , , where . and are appropriate dimensional control gain matrices to be designed. is a constant signal transmission delay.
The uncertainties and represent the possible controller gain fluctuations. It is assumed that and have the following form
where , and are know constant matrices with appropriate dimensions and is an unknown matrix function satisfying .
Remark 4: In practical applications, the parameter perturbations are unavoidable, which influence stability and performance of the system. Therefore, it is necessary to introduce non-fragile control. Meanwhile, communication delay always exist in the real physical systems. In order to deal with these perturbations and time delay, non-fragile memory sampled-data control is designed.
Define as synchronization error. Furthermore, define
Therefore, we have the error system
where
with , , .
In order to prove the theoretical results, the definition of quasi-synchronization is given below.
Definition 2: The heterogeneous complex networks (1) is said to achieve quasi-synchronization with the leader network (2), if there exist an error bound such that
hold for any initial conditions.
The aim of this paper is that, quasi-synchronization of the systems (1) and (2) with the control (4) can be exponentially by using an improved Lyapunov-Krasovskii. The main difficulty and challenge in achieving quasi-synchronization is how to deal with the unstable factors caused by heterogeneity. Note that exists and lead to significant differences between each follower and the leader. Therefore, it is necessary to estimate the bound of according to the equation (7). From Assumption 2 and Assumption 3, it is accessible to obtain that
where
Main results
In this section, the sufficient condition of non-fragile quasi-synchronization will be presented for heterogeneous complex network (6) with memory sampled-data control.
For the sake of simplicity, let () to denote block entry matrices, (such as ). The other notations are defined as follows
Theorem 1: For given constants , , , and , and diagonal matrices
if there exist positive definite matrices , , , , (), , , and, diagonal positive matrix , matrices , diagonal matrices , , and a diagonal real matrix such that the following inequality hold for any
then, the follower networks (1) and the leader network (2) under control (4) can achieve quasi-synchronization.
Proof: We choose the Lyapunov function candidate as follows
where
Differentiating with respect to along the trajectory of system (6), we have
For any positive matric , it is calculated that
In view of Jensen’s inequality and Lemma 1, an upper bound of is estimated as
where
Moreover, we can get from Assumption 2, satisfies Lipschitz condition, therefore
with , and for a diagonal positive matrix , the following inequalities is true
For matrices and , we have
By (5)
and so there exists satisfying
In order to make sure the error system can exponentially stable and convergent to a bounded region, we have
To deal with the integral term, the following inequality is introduced
where .
Then, by Lemma 2 we can obtain the following inequality
Substituting (14)–(16) and (19) into (17), we obtain
where
According to Lemma4, if and only if
which by Schur complement is equivalent to (11). Therefore, for we deduce that
Multiplying to both sides of the inequality (23), and integrating from to , then
According to (13) we have
therefore
we can conclude that
So, the follower networks (1) and the leader network (2) under control (4) can achieve quasi-synchronization, and we get the upper bound on the error
The proof is completed.▪
Remark 5: Theorem 1 guarantees the non-fragile quasi-synchronization for heterogeneous complex delayed networks with a memory sampled-data controller. In real-life applications, the controller gain fluctuation always exists. The existence of controller gain fluctuation may add the complexity of the complex dynamical networks. By using the algorithm given in Theorem 1, we can ensure that the synchronization can be achieved even if the control gain is uncertain.
Remark 6: Note that the Wirtinger-based integral inequality (Seuret et al., 2013) was proposed for the sampled-data control system to reduce the conservatism of the sufficient conditions. Because using the improved inequality to deal with the term , that can provide a more accurate upper bound than Jensen’s inequality.
To simplify the calculations, we will provide an effective control feedback gain design on the basis of Theorem 1.
Theorem 2: For given constants , , , , and , if there exist positive definite matrices , , , ,(), , , and , diagonal positive matrix , matrices , diagonal matrices , , and , and a diagonal real matrix such that the following inequality hold for any
then, the follower networks (1) and the leader network (2) under control (4) can achieve quasi-synchronization. Furthermore, the control gain matrices and are given by and , and
Define
Proof: Pre and post-multiplying (20) by , and then, according to the Schur complement ,we can get linear matrix inequalities (25) and (26). This completes the proof.
When there is no uncertainly involved, control (4) and the error system of (6) are reduced to
By Theorem 1, we have Corollary 1 on the quasi-synchronization of delayed heterogeneous dynamical networks with memory sampled-data control. Here, for notational simplicity, let () to denote block entry matrices, (such as ). The other notations are defined as follows
and
Corollary 1: For given constants , , and , if there exist positive definite matrices , , , ,(), , , and , diagonal positive matrix , matrices , diagonal matrices , , and a diagonal real matrix such that the following inequality hold for any
Then, the follower networks (1) and the leader network (2) under control (28) can achieve quasi-synchronization.
Remark 7: For sampled-data quasi-synchronization of heterogeneous dynamical networks with delay, the choice of the sampling interval is extremely important for designing suitable feedback control. We know that a longer sampling period will result in lower communication channel occupation and less signal transmission. To achieve this goal, the memory sampled-data controller is proposed here, which may provide a larger sampling period than the conventional sampled-data controller.
When =0 in control (28), removing the term in the constructed Lyapunov function (13), we have Corollary 2 induced from Corollary 1 directly. Once again for the simplicity of matrix representation, let () to denote block entry matrices, (such as ). The other notations are defined as follows
and
Corollary 2: For given constants , , if there exist positive definite matrices , , , , , , and , diagonal positive matrix , matrices , diagonal matrices , , and a diagonal real matrix such that the following inequality hold for any
Then, the follower networks (1) and the leader network (2) under sampled-data control can achieve quasi-synchronization.
Corollary 3: Supposed that all conditions of Theorem 1 hold. Then, heterogeneous networks (1) and (2) can achieve complete synchronization when .
Examples
In this section, the validity of the theoretical results will be illustrated.
Example 1: Numerical simulations of Theorem 1. Choose a heterogeneous nonlinear delay network consisting of one leader and three followers, the -th subsystem is given as
where and are the damping constants, are model parameters, and are input disturbances. So, the corresponding parameters of system (1) can be expressed as , , , , .
Here, it is assumed that , , , and . In addition, the relative parameters of the leader are given as
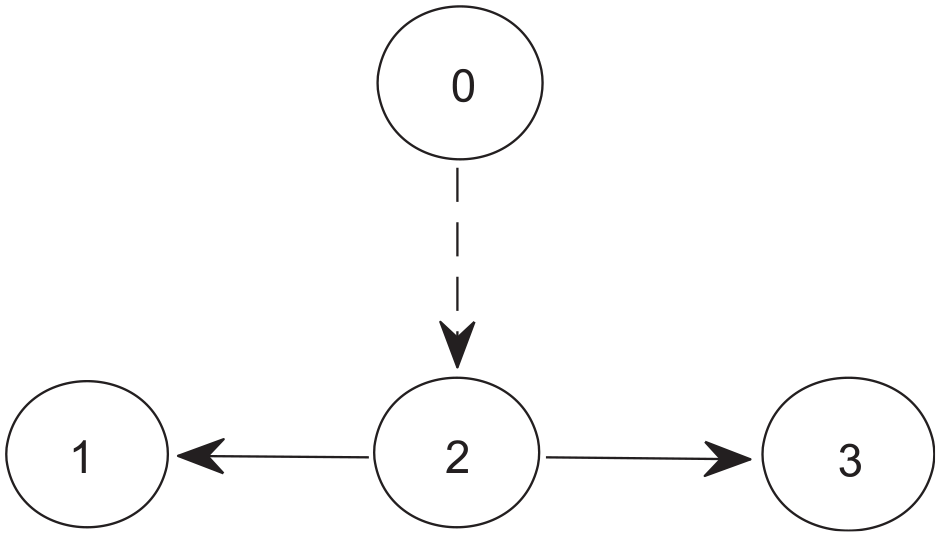
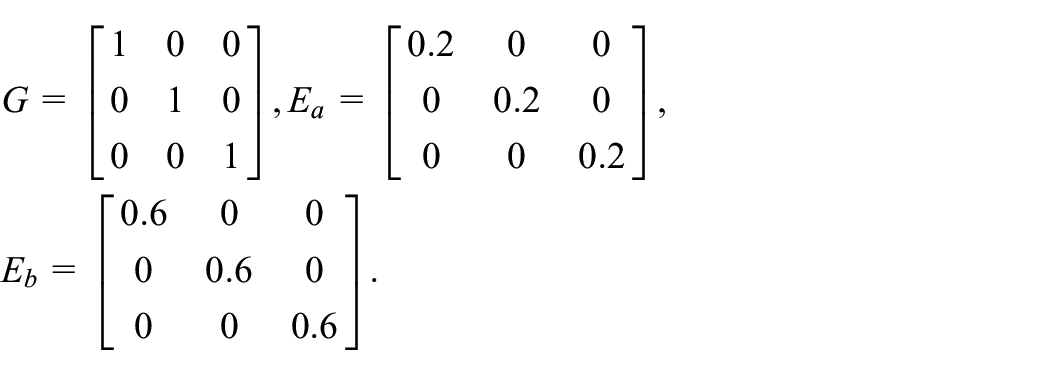
Suppose that all weights of the selected network are represented by a common constant , where . From Figure 1, we can select
The parameter matrices for uncertainties are given as
In the case of without controller gain fluctuation, by calculating the condition in Corollary 1 and with the parameters , , , , and , the maximal sampling period is . Under the sampling interval , the corresponding sampled-data control matrix and can be designed as
On the other hand, in the case of , by calculating the condition in Corollary 2 and with the parameters , , and , the maximal sampling period is . Under the sampling interval , the corresponding sampled-data control matrix can be designed as
From the above results, we can see that Corollary 1 can provide a larger sampling interval than Corollary 2.
To show the effect of the perturbations in controller, taking , , , , ,, . And by calculating the condition in Theorem 1, the maximal sampling period is . For simplicity, protocol (4) is designed as periodic sampling, with sampling period , according to Theorem 1, we can ascertain
and
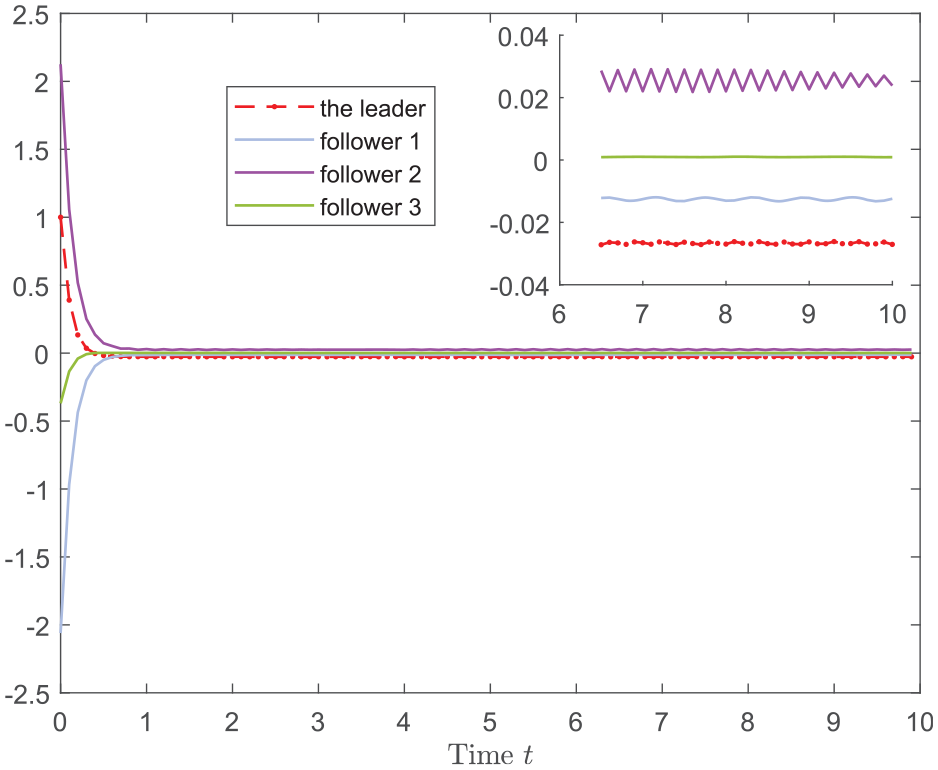
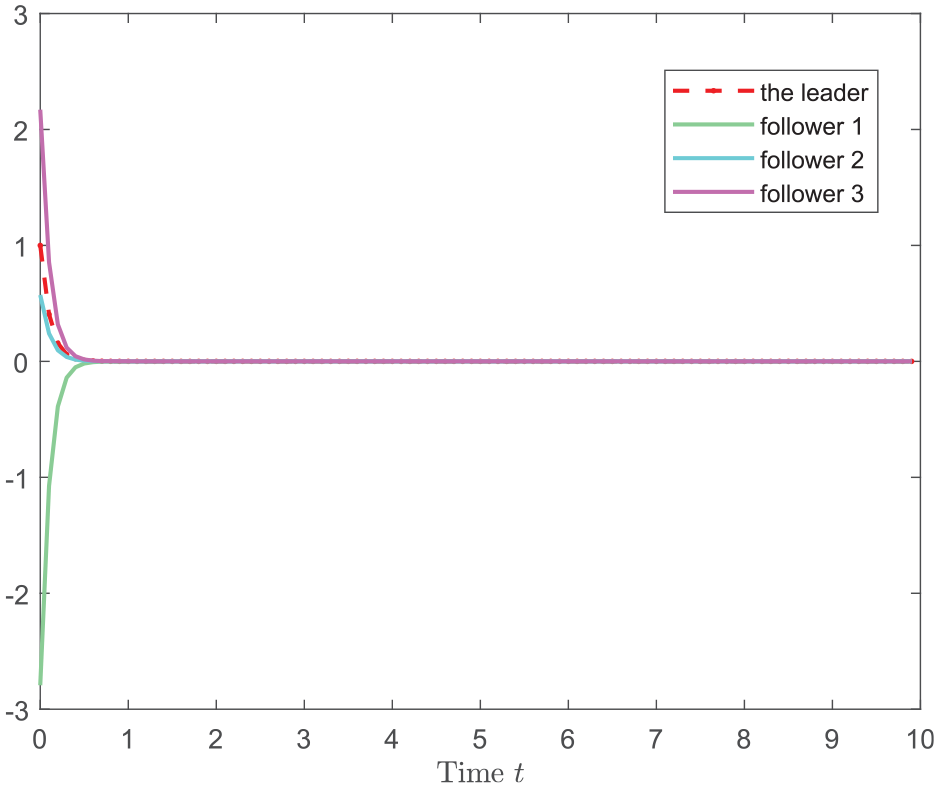
Select for the leader and random initials for the followers. The trajectories of (the leader) and (three followers) are drawn in Figure 2. It is not difficult to get from Figure 2. Based on inequality (15) and parameters , , , by simple calculation we have , , , further we get . Figure 3 shows the comparison between the practical synchronization error and the estimated synchronization error.
The trajectories of and .
Practical and estimated synchronization errors.
It can be seen from Figure 2 and Figure 3 that heterogeneous systems (1) and (2) can achieve quasi-synchronization.
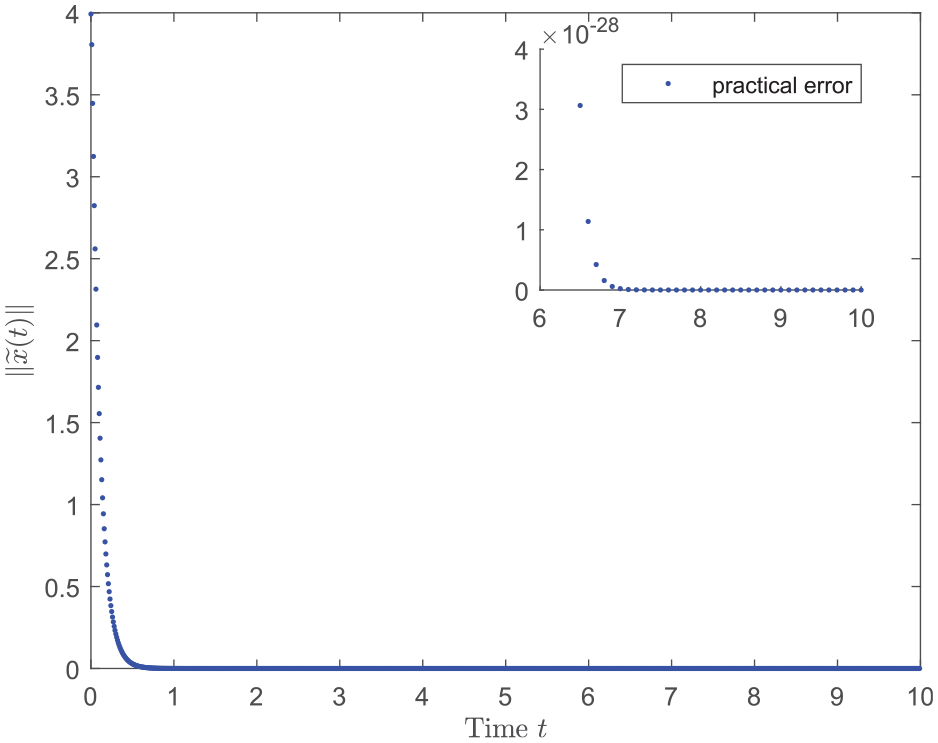
Example 2: Numerical simulations of Corollary 1. The heterogeneous complex network becomes homogeneous network when . The -th subsystem model of the homogeneous network is defined as
where it is assumed that
The leader system can be modeled as follows
Therefore, we can see from Figure 4 and Figure 5 that homogeneous systems (36) and (37) can achieve complete synchronization.
Remark 8: Compared with the homogeneous network in Example 2, the heterogeneous complex network we considered in Example 1 is closer to reality. In Example 1, we can see that heterogeneity is caused by the existence of . When , the heterogeneous network becomes a homogeneous network. However, it is found through research that it is difficult to achieve synchronization for heterogeneous networks. We can see form Figure 2 that followers can only track the leader within a bounded range. Also, Figure 3 shows that the synchronization error of the heterogeneous network does not tend to zero. Therefore, the heterogeneous complex delayed network we considered can achieve quasi-synchronization. In addition, we have calculated the estimated upper bound of error.
The trajectories of and .
Practical synchronization errors.
Conclusion
In this study, we have investigated the problem of non-fragile quasi-synchronization for a class of delayed heterogeneous dynamical networks. To solve the quasi-synchronization problem for such networks, we have designed a sampled-data feedback control that takes into account the norm-bounded time-varying uncertainty and constant signal transmission delay effect. By introducing a leader, the heterogeneous complex delayed networks can be transformed into the error systems with bounded disturbances. Furthermore, applying the Lyapunov-Krasovskii function, and with the help of introduced integral inequalities and employing the linear matrix inequality, a sufficient criterion ensuring the error system can non-fragile exponentially stable and convergent to a bounded region is presented. Besides, the control gain matrix is designed. Finally, simulation examples has been presented to demonstrate the effectiveness of the theoretical results. As a potential future research topic, we will focus on T-S fuzzy heterogeneous complex networks with memory sampled-data control.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grant nos. 61771250 and 61971234, and the Natural Science Foundation of Jiangsu Province of China under Grant no. BK20181387, and Nanjing University of Posts and Telecommunications Foundation of China under Grant no. NY220209.
ORCID iDs
Manyu Zhao
Jun Ye
References
1.
AouitiCBessifiMLiXD (2020) Finite-time and fixed-time synchronization of complex-valued recurrent neural networks with discontinuous activations and time-varying delays. Circuits Systems and Signal Processing39(11): 5406–5428.
2.
GeCParkJHHuaCCGuanXP (2021) Nonfragile consensus of multiagent systems based on memory sampled-data control. IEEE Transactions on Systems, Man, and Cybernetics: Systems51(1): 391–399.
3.
HeWLQianFLamJ, et al. (2015) Quasi-synchronization of heterogeneous dynamic networks via distributed impulsive control: Error estimation, optimization and design. Automatica62: 249–262.
4.
HuangYBaoHB (2020) Master-slave synchronization of complex-valued delayed chaotic Lur’e systems with sampled-data control. Applied Mathematics and Computation379: 125261.
5.
HuangYLWangSX (2018) Synchronisation in an array of spatial diffusion coupled reaction-diffusion neural networks via pinning control. International Journal of Systems Science49(5): 1103–1118.
6.
KarthickSASakthivelRAlzahraniFLeelamaniA (2020) Synchronization of semi-Markov coupled neural networks with impulse effects and leakage delay. Neurocomputing386: 221–231.
7.
KimJH (2016) Further improvement of Jensen inequality and application to stability of time-delayed systems. Automatica64: 121–125.
8.
LiHJ (2013) H-infinity cluster synchronization and state estimation for complex dynamical networks with mixed time delays. Applied Mathematical Modelling37(12–13): 7223–7244.
9.
LiHLGaoXBLiRX (2020) Exponential stability and sampled-Data synchronization of delayed complex-valued memristive neural networks. Neural Processing Letters51(1): 193–209.
10.
LiXJYangGH (2017) Adaptive fault-tolerant synchronization control of a class of complex dynamical networks with general input distribution matrices and actuator faults. IEEE Transactions on Neural Networks and Learning Systems28(3): 559–569.
11.
LiuKFridmanE (2012) Wirtinger’s inequality and Lyapunov-based sampled-data stabilization. Automatica48(1): 102–108.
12.
LiuYSuH (2019) Containment control of second-order multi-agent systems via intermittent sampled position data communication. Applied Mathematics and Computation362: 124522.
13.
LiuYJGuoBZParkJHLeeSM (2018) Nonfragile exponential synchronization of delayed complex dynamical networks with memory sampled-data control. IEEE Transactions on Neural Networks and Learning Systems29(1): 118–128.
14.
LuBLJiangHJHuCAbdurahmanA (2020) Spacial sampled-data control for H-infinity output synchronization of directed coupled reaction-diffusion neural networks with mixed delays. Neural Networks123: 429–440.
15.
LuoJNLiuXZTianWH, et al. (2020) A new approach to generalized dissipativity analysis for fuzzy systems with coupling memory sampled-data control. Applied Mathematics and Computation368: 124774.
16.
ParkPKoJWJeongC (2011) Reciprocally convex approach to stability of systems with time-varying delays. Automatica47(1): 235–238.
17.
QiuBLiLPengHYangY (2018) Synchronization of multi-links memristor-based switching networks under uniform random attacks. Neural Processing Letters48(3): 1431–1458.
18.
QueHYFangMWuZG, et al. (2019) Exponential synchronization via aperiodic sampling of complex delayed networks. IEEE Transactions on Systems Man Cybernetics-Systems49(7): 1399–1407.
19.
SeuretAGouaisbautF (2013) Wirtinger-based integral inequality: Application to time-delay systems. Automatica49(9): 2860–2866.
20.
ShiKBWangJZhongSM, et al. (2020) Non-fragile memory filtering of T-S fuzzy delayed neural networks based on switched fuzzy sampled-data control. Fuzzy Sets and Systems394: 40–64.
21.
TanFZhouLLChuYMLiYM (2020) Fixed-time stochastic outer synchronization in double-layered multi-weighted coupling networks with adaptive chattering-free control. Neurocomputing399: 8–17.
22.
WangJFTianLX (2019) Stability of inertial neural network with time-varying delays Via sampled-data control. Neural Processing Letters50(2): 1123–1138.
23.
WangFYLiuZXChenZQ (2020) Delay-induced containment control of second-order multi-agent systems with intermittent sampled position data. IEEE Access8: 20334–20341.
24.
WangXLiuXZSheK, et al. (2019) Extended dissipative memory sampled-data synchronization control of complex networks with communication delays. Neurocomputing347: 1–12.
25.
WangZXFanJBJiangGP, et al. (2018) Consensus in nonlinear multi-agent systems with nonidentical nodes and sampled-data control. Science China-Information Sciences61(12): 122203.
26.
XuTSXiaJWWangSX, et al. (2020) Extended dissipativity-based non-fragile sampled-data control of fuzzy Markovian jump systems with incomplete transition rates. Applied Mathematics and Computation 380: 125258.
27.
YangHHWangZXXiaoM, et al. (2019) Quasi-synchronization of heterogeneous dynamical networks with sampled-data and input saturation. Neurocomputing339: 130–138.
28.
YangSHuCYuJJiangH (2020) Exponential stability of fractional-order impulsive control systems with applications in synchronization. IEEE Transactions on Cybernetics50(7): 3157–3168.
29.
YuTHWangHMCaoJDYangY (2020) On impulsive synchronization control for coupled inertial neural networks with pinning control. Neural Processing Letters51(3): 2195–2210.
30.
YuanMMWangWPLuoX, et al. (2018) Synchronization of a class of memristive stochastic bidirectional associative memory neural networks with mixed time-varying delays via sampled-data control. Mathematical Problems in Engineering 2018: 9126183.
31.
ZhangRMZengDQParkJH, et al. (2018) Nonfragile sampled-data synchronization for delayed complex dynamical networks with randomly occurring controller gain fluctuations. IEEE Transactions on Systems Man Cybernetics-Systems48(12): 2271–2281.
32.
ZhuYZZhengWXZhouDH (2020) Quasi-synchronization of discrete-time Lur’e-type switched systems with parameter mismatches and relaxed PDT constraints. IEEE Transactions on Cybernetics50(5): 2026–2037.