
Abstract
The use of data networks in control loops has received much attention recently due to its flexibility and economical advantages. In addition, mutual network usage has raised new challenges such as delay and data loss. This paper aims to reduce undesired effects of network by reducing the required traffic of the network. An estimation framework for network control system is introduced, in which estimations of local Kalman filter is sent to remote estimator based on the logic decided by a novel fuzzy communication logic. In order to do so, there exist two estimators, a remote estimator which estimates the states of the plant and its local copy that gives the same output. The output of the local estimator is compared with the real states of the system, if the states of the system are estimated with small error, there is no need to send data, hence, the probability of sending data is decreased using a fuzzy decision system. In order to optimize this fuzzy system, a particle swarm optimization (PSO) algorithm is used. The proposed method is applied to control a pair of overhead crane systems with non-linear dynamics. Since the two overhead cranes need to work synchronously and their synchronization is performed over a network, the control of this system lies within the scope of the proposed controller. Simulation results show that the communication load is reduced and the purposed fuzzy communication logic is able to control the non-linear dynamical systems over a network with a sufficient performance.
Introduction
Network-based control systems (NBCSs) are partial distributed systems in which the connection between sensors, actuators and controllers take place over a narrow-band digital network (Khanesar et al. 2015; Zhang et al. 2013; Zuo et al. 2016).
In addition to the awesome development of the digital world and widespread presence of the internet and intranet, the low cost of maintenance and installation of NBCSs and the ease of its expansion compared with old-fashioned architecture have given rise to the need for NBCSs. However, exchanging data via a network in NBCSs leads to new challenges such as time delays and packet losses. It is widely known that time delays and packet losses in a network are challenging and difficult to handle (Yin et al. 2016b,a). Usually, transmission errors in physical links or band overflows due to network congestion cause the loss of data. Furthermore, the high level of noise corrupts the data transmission performance. Delays in the control loop are usually time-varying and stochastic. This is mainly because the number of nodes simultaneously requesting to join network is time-varying and the length of messages sent by dominant nodes may also vary with time.
In general, network delays include three main parts: the first part is based on time needed to transmit data packets; the second is the delay caused by packets waiting in buffers for transmission and being accessible for the network; and the last is the delay during which the source (controller or remote system) puts the packets on the network (Wu et al. 2016). Moreover, in order to perform the stability analysis and obtain appropriate performance for the system, we need to determine the minimum bit-rate to stabilize a successful feedback system (Naghshtabrizi et al. 2010; Hespanha et al. 2002; Nair and Evans 2003; Tatikonda and Mitter 2004).
So far, different methods have been tried to make a robust and controllable NBCS. In related research, an architecture is proposed in which an estimator was used to reduce communication congestion in distributed control systems and improve its quality of service (Xu and Hespanha 2004, 2005; Yook et al. 2002). It should be noted that the network controller decides not to put all data packages on to the network; instead, based on estimators information at each time instant, an appropriate decision is made in the way that: if the remote prediction error is more than a threshold, the probability of sending the real data over network increases; otherwise, the values estimated by the remote estimator are used. This leads to a decrease in network traffic and improves the overall performance of the system (Xu and Hespanha 2004; Yook et al. 2002; Xu and Hespanha 2005).
Most of the existing research in the literature assumes that the plant is linear. Optimum communication for NBCSs was achieved using an estimator in order to decrease communication congestion. This was performed by formulating an average cost function optimization that can be solved using dynamic programming (Xu and Hespanha 2004). These optimal logics only work for discrete-time linear time-invariant (LTI) systems. Xu and Hespanha (2004) planned deterministic and stochastic communication logics to determine the type of connection among controllers in a distributed control structure within an estimator. This study focuses on linear continuous-time time-invariant processes, with a constant delay. Yook et al. (2002) proposed a new structure based on estimation for distributed control systems. If the remote estimation error is not significant, it will use an estimated value instead of real values, leading to a substantial reduction in the required bandwidth. The stability, efficiency and expected communication frequency of decreased communication system is analysed. This estimation framework just in the case of discrete-time, LTI systems have been studied. It was proved that the proposed algorithm works for bounded-input, bounded-output (BIBO) stable systems. Xu and Hespanha (2005) proposed a linear time-variant estimation structure was proposed for NBCS. The structure includes a smart sensor, a remote estimator and a network in between. The smart sensor also includes a communication scheduler and a Kalman filter. In some time instances determined by scheduler, a smart sensor transmits the local estimation to a remote estimator; the mentioned method is applied to linear systems as well.
In this paper, a novel network controller is proposed that reduces the network traffic by using two local and remote estimators. Unlike the previous network controllers that were presented for the linear case, the proposed approach can be applied to the non-linear cases as well. Two local and remote estimators are used that are completely identical and use the same data inputs. If the estimated value obtained by the local estimator and the real states of the system are close to each other, it is required to reduce the probability of transmission of measured signal and in the case when estimation error is high, it is required to increase the probability of transmission of the measured signal. The system that is considered in this paper is a non-linear system which results in the use of an extended Kalman filter (EKF). A novel communication logic based on fuzzy logic is presented for non-linear dynamic systems. The main characteristics of fuzzy systems are flexibility and their ability to linguistically explain the rules that control the system. In order to find the optimal parameters for the proposed fuzzy system, a particle swarm optimization (PSO) method is used. The proposed communication logic makes a compromise between the amount of information transmitted over the network and the performance of the system.
This paper is organized as follows. In the following section, the basic structure of fuzzy and neuro-fuzzy systems is introduced. Then the PSO is described. The next section has been devoted to describing the EKF. After this, the linear quadratic regulator (LQR) is explained and the design of the proposed estimation scheme in NBCS is presented. We then describe the importance and the mathematical model of the overhead crane system. Finally, the proposed method is applied to a pair of overhead crane systems and related simulation results are given, followed by conclusions.
Problem statement and framework
The main objective of this paper is to reduce the undesirable effects of the network by decreasing the communication load. In this section, we describe the estimation structure for reducing communication using state estimators and fuzzy communication logic.
In this section, an estimator is designed for a non-linear system in NBCSs. The estimation model has the ability to utilize a local Kalman filter and preprocess measurements. The estimation sketch includes a fuzzy communication scheduler, a remote estimator, LQR, and a network as shown in Figure 1. The controller uses the simple feedback controller of
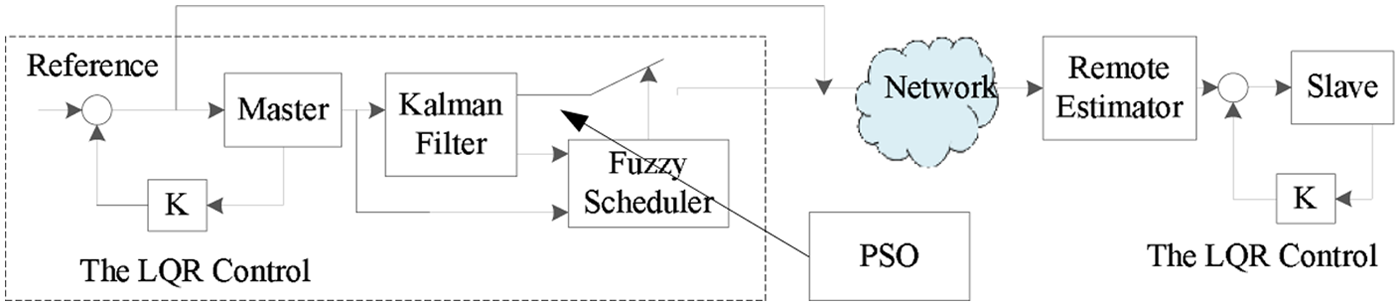
The NBCS over a controlled communication network.
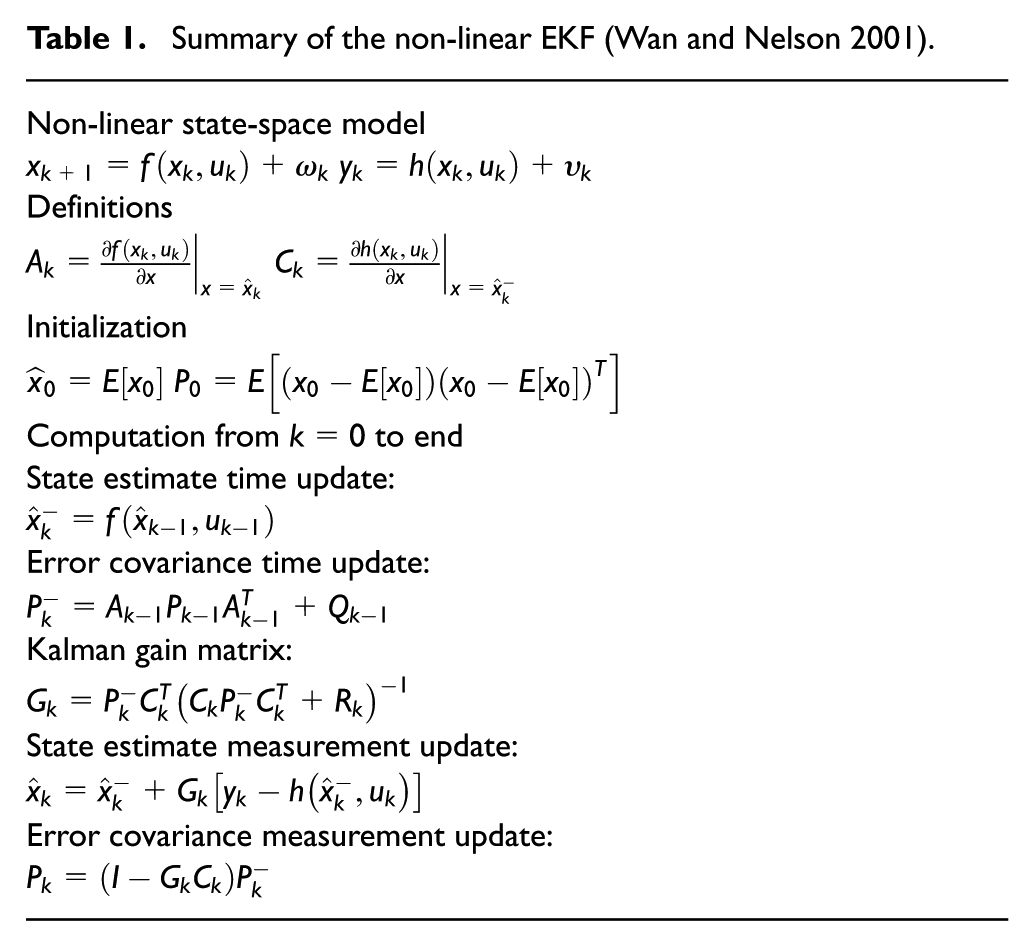
Undoubtedly, one of the best optimal estimators and predictors, especially in the case of high-noise data, is Kalman filtering. The proof for this is based on filtering output noise and reduction of computations due to the need to archive only the last state, resulting in less storage occupancy. While Kalman filtering only works in linear systems, its extended version can handle non-linear problems by linearization about the best-known latest system estimation with the assumption that the errors caused by omitting high-order terms are tolerable compared with those caused by neglecting lower-level terms. Thereupon, updating equations while applying to a linear system leads to an optimum solution (VanDyke et al. 2004).
Non-linear model for EKF is as follows:


the parameters
1. Two matrices are obtained in the linearization process:


Here, the ijth element of matrix
2. After calculating the matrices


Using (5) and (6), linearized estimation of the non-linear model of equations (1)–(2) can be achieved at estimated points


where


As the linearization during the sampling period is used for non-linear systems, the non-linear system is estimated with a time-variable linear system. Table 1 shows the EKF used for estimation of the state variable in the non-linear system.
Summary of the non-linear EKF (Wan and Nelson 2001).
State variable x is calculated using a local Kalman filter, and is transmitted to the remote estimator during the times specified by the fuzzy communication scheduler; a decision is made based on how close the local estimator is to real measured values. The remote estimator is a copy of a local Kalman filter, the latter is updated when data is sent successfully. The network-induced time delay is considered to be ignorable in this method. Finally, using the PSO algorithm, the parameters of the fuzzy communication scheduler by which the best compromise between communication rate and system performance can be achieved are specified. The PSO algorithm is summarized in the appendix.
Fuzzy and neuro-fuzzy structure
Fuzzy logic has been experiencing an extensive increase in its variety and use (Toosi and Kahani 2007). A combination of neural networks and fuzzy logic, as a soft computing approach, has become popular and is know as a neuro-fuzzy system (Jang 1993). The main structure of many fuzzy logic systems is a model of mapping input specifications to input membership functions (MFs). The three most frequently used types of fuzzy information systems used in the literature have been utilized in several systems. A fuzzy model named Mamdani (Mamdani and Assilian 1999), was the first attempt to reach an input map to an output space (Mamdani and Assilian 1999).
A typical fuzzy IF–THEN rule for such a structure is as follows (Kayacan and Khanesar 2015):

where

where

The output of the fuzzy system in closed form is obtained as follows:

System description
Considering the amount of heavy equipment in use nowadays, cranes are the main method for moving heavy items around. With respect to the mechanical and dynamic structures, cranes can be categorized into three groups: overhead/gantry, rotary and boom (Shebel et al. 2011).
The first type is popular for carrying out load transfer from one point to another (Moustafa et al. 2009). Overhead cranes re mostly used in seaport transfers, as well as mines, stocks, oil and gas industry, petrochemical and nuclear power plants. An overhead crane uses a trolley moving on a defined path. As a result of hanging the load from the trolley by a cable, it is exposed to being overhung due to improper control input and distortion. Crane control must be able to move the trolley as quickly as possible to decrease both load transfer timing and load fluctuations in order to prevent harm to people and equipment (Abdel-Rahman et al. 2003). Industrial cranes tend to be long and tall, so they should be able to move faster in order to achieve acceptable transfer times. Unfortunately, huge cranes with massive structures moving quickly leads to undesired fluctuations caused by system dynamics. In the case of high load volume, in order to reduce unfavourable cost and swing of huge cranes, simultaneously using two smaller overhead cranes instead of one long and tall crane is suggested. The significant points that must be considered are first the oscillation angle of the overhead crane and afterwards the load angle of both cranes that must be equal, moving perfectly simultaneously with equal movements. For this purpose, we utilize two overhead cranes with similar dynamics within a controlled network, one working as a master and the other as a slave. The slave’s angle and position are dependent variables determined via a function of the angle and position of the master to correct movement of the load. Furthermore, to overcome the stability problem of the overhead crane as well as preventing safety difficulties resulting from payload oscillations, a controller is devoted to each crane (see Figure 2).
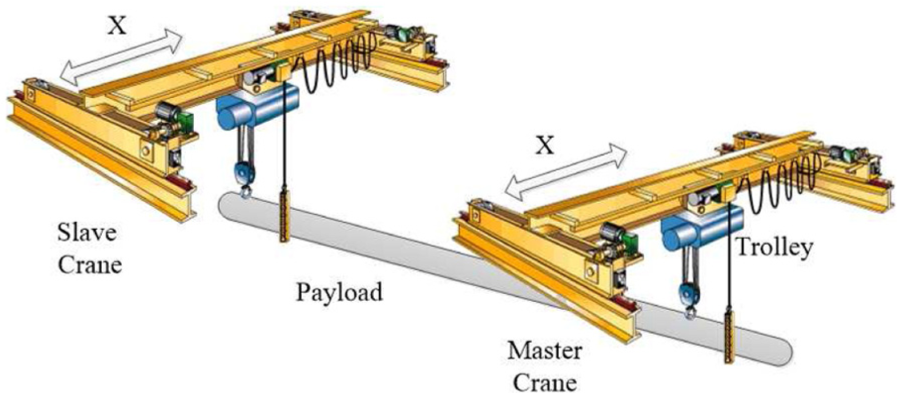
Two overhead cranes over a network.
Mathematical modelling of overhead crane
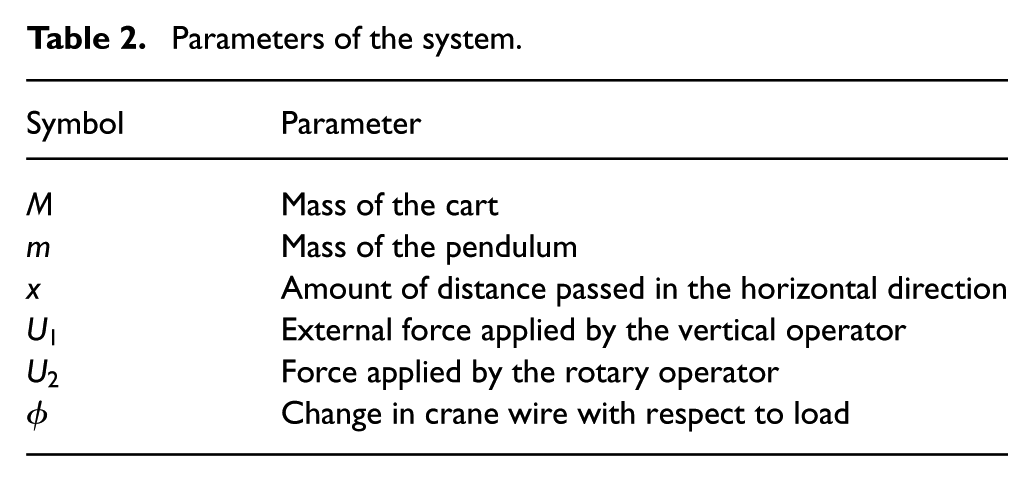
To model an overhead crane, it is compared with the well-known cart-inverted pendulum model, in which the cart connected to a pendulum is the moving motor of the crane and the inverted pendulum plays the same role as the crane’s wire. Therefore, the overhead crane system could be approximated with an inverted pendulum model. The parameters of the pendulum are as listed in Table 2 with its shape as being shown in Figure 3.
Parameters of the system.
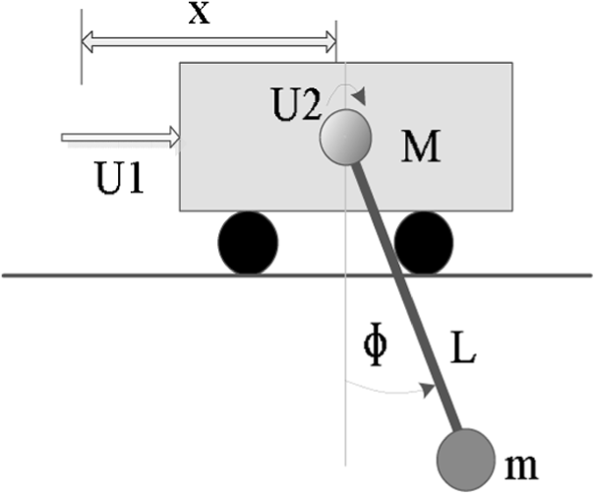
Cart pendulum model.
The horizontal dynamics of the cart is as follows:

The vertical dynamics of the cart is as follows:

The dynamics of the load has two components. While its horizontal dynamics is

its vertical dynamics is obtained as

By combining equations (24) and (25), the following equation is obtained:

From equations (26) and (27), it follows that

where

and

In a nutshell, solving equations (27), (30), (31) and (32):



From equations (33) and (34), it follows that

Solving the above equations results in
Simulation and results
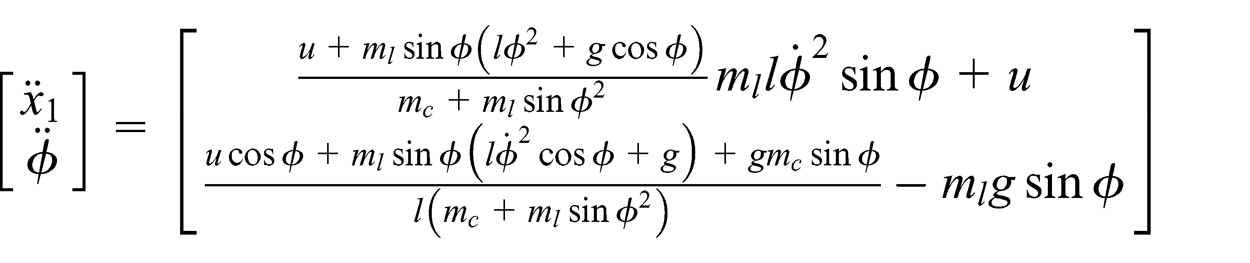
In this section, the simulation of the overhead crane system has been carried out using MATLAB software. Two overhead crane systems, a master and a slave, have been employed to demonstrate the distributed structure of communication fuzzy logic. These two overhead crane systems have the same dynamics. The dynamics of the systems that have been used are given by
Where
If both the pendulum angle (
The control goal is to adjust the angle of load slave overhead crane to track the master’s overhead crane angle of load. The dynamic non-linear overhead crane system will be controlled by a LQR controller. The values of

which correspond to the following parameters of the LQR.
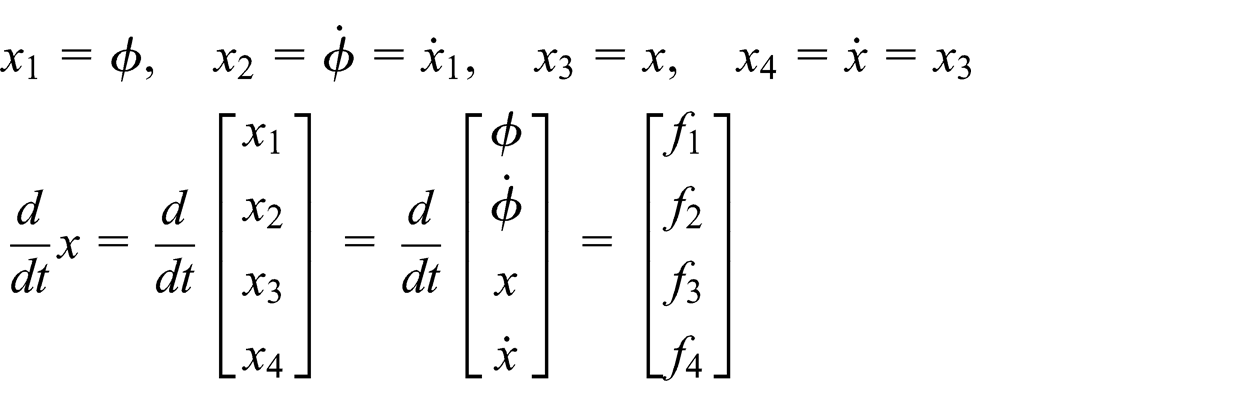
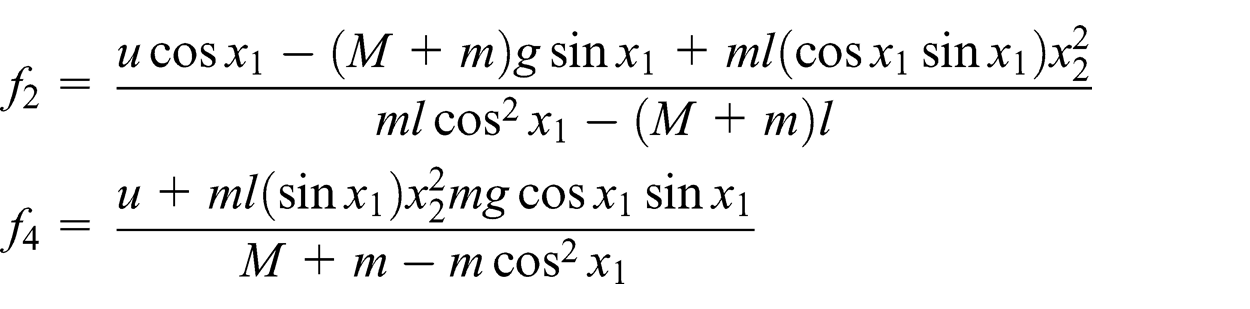
The state space equations of the overhead crane system have been shown, which were obtained using a continuous time setting with

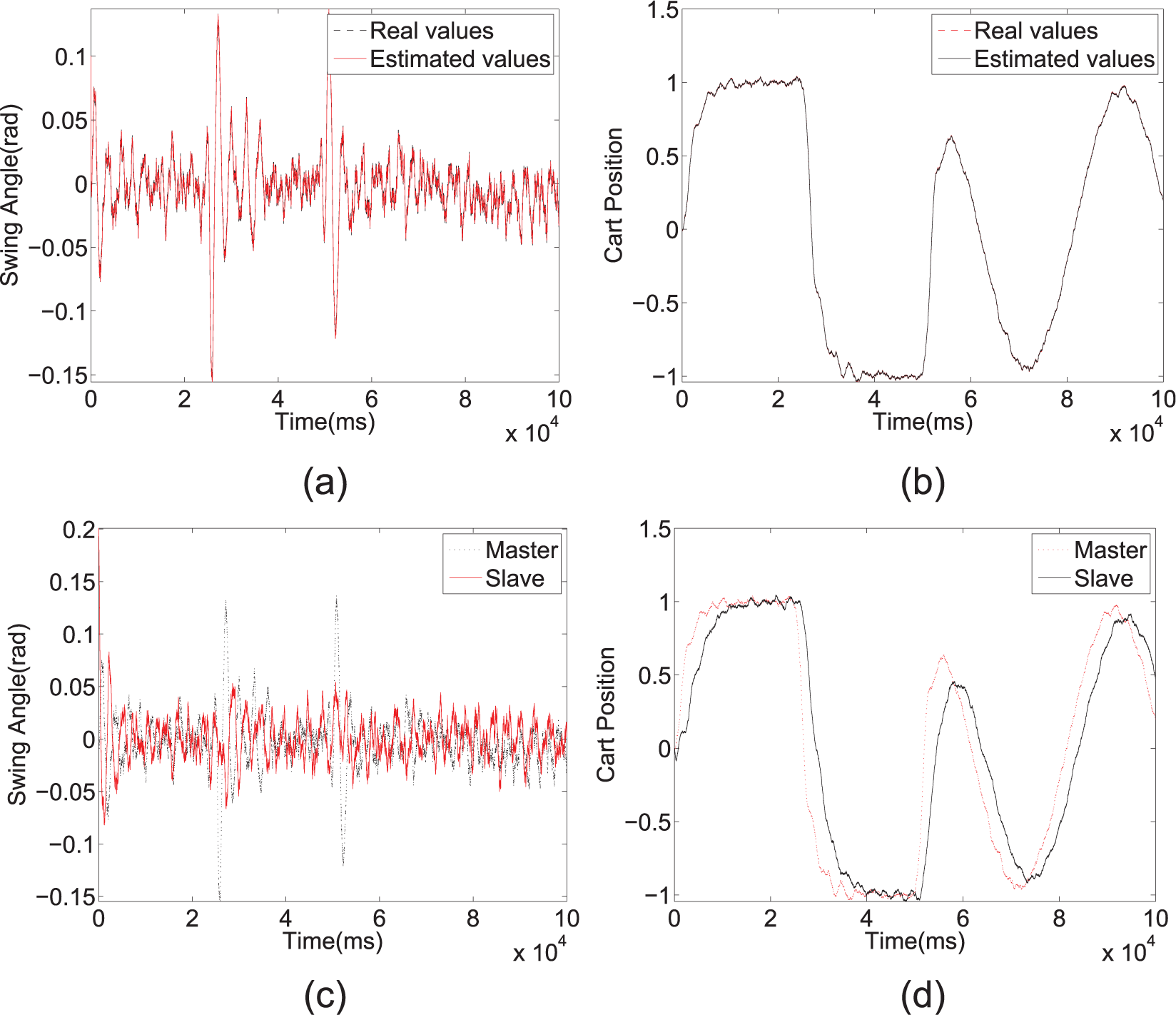
Figure 4(a) and (b) show the estimates generated by the EKF which has two identical copies on both the master and the slave. EKF is an extended version of the Kalman filter in which the dynamic system is non-linear. In this extension, only first-order terms of the Taylor series are considered and higher-order terms are neglected. Neglecting these terms may result in some error. Furthermore, using the proposed logic in this paper to reduce the traffic of the network, not all data packages are transmitted over network. This may also cause more errors. These issues are the main causes of estimation errors.
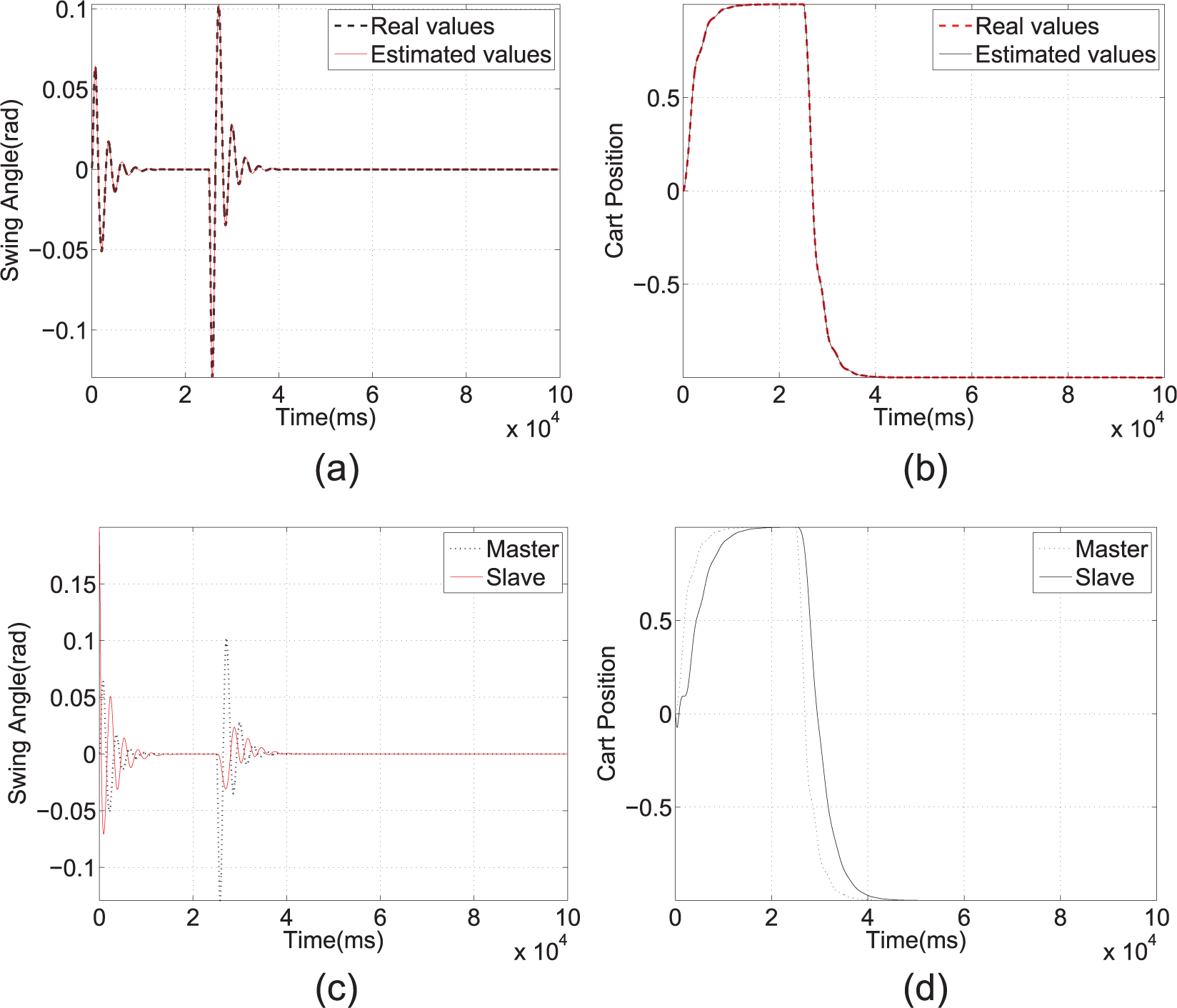
The responses of the system without noise: (a) actual and estimated angle value of the master inverted pendulum; (b) actual and estimated value of the cart x position for the master system; (c) angle of the master and slave inverted pendulum; (d) the master and slave cart x position.
The tracking performances of the angle and the position of the inverted pendulum are depicted in Figure 4(c) and (d). Consider a fuzzy system with four inputs and five MFs for each input. Such a system will have five rules. Each MF has two parameters to be trained. These parameters are the centre of MFs and also the standard deviation of them, which are here called m and

where e is the tracking error between the master and slave system and

The sent or not sent instances.
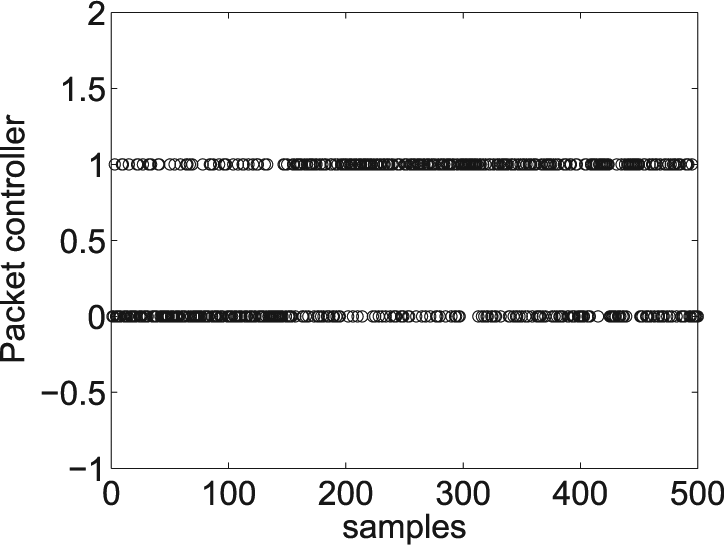
Decision made by the fuzzy network controller on sending or not-sending the data package.
It should be noted that the estimation error may result in some problems in the control system such as instability and lower performance. However, the controller used is a LQR controller which is proved to be robust enough to a certain level of uncertainty in measurements and errors. Hence, these uncertainties may rarely cause instability. Furthermore, since an optimizer is added to the whole control system, the instabilities which are visited during optimization are penalized by a large value. The parameters of the fuzzy system obtained during optimization are such that no instability happens in the system.
The number of decision variables in the optimization are equal to 45 in which 20 centres and sigmas are for membership functions of the fuzzy system and 5 parameters are considered for the consequent part parameters of the fuzzy system. The population size of the PSO is selected as to be equal to 40. The values of the parameters of PSO, W,
The trend of convergence of the objective function is shown in Figure 7. As is clear from Figure 7 using PSO algorithm, fuzzy communication scheduler parameters by which the best compromise between communication rate and system performance can be achieved, are specified. Table 3 shows the performance criteria for the proposed method. As can be seen from Table 3, the proposed approach can reduce the network traffic by 72.227% which is a great outcome. In other words, using the proposed approach, the fuzzy system decides to send one package out of four data packages to the slave which reduces the network traffic considerably. The obtained results show that the proposed optimal fuzzy logic decision-making system is an effective method in reducing the traffic of the network. However, in order to investigate the effect of noise and uncertainties in the system, another experiment is carried out in which noise and uncertainty is added to the system which corresponds to a more realistic conditions. It is considered that the real values of the real-time system are uncertain. For this case, 10% of uncertainties are added to the mass of pendulum, the mass of cart and the length of the pendulum. Moreover, Gaussian zero-mean noise is added to all of the states of the system with variance equal to 0.1. The population size considered for PSO is selected as to be equal to 30 and the maximum number of iterations are selected to be equal to 50. Moreover, the inertia parameter W is selected to be equal to 1.2 and the other parameters of PSO
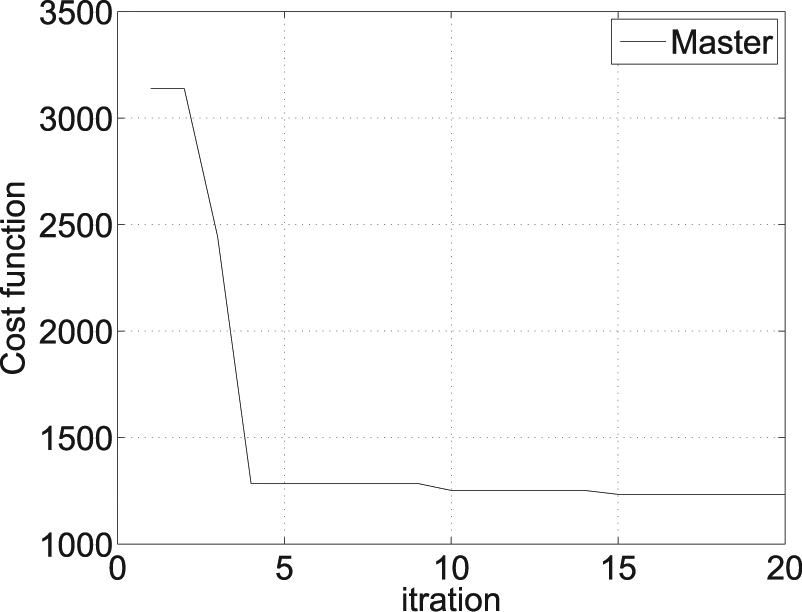
The trend of convergence of the objective function for the PSO method.
Validation criteria for fuzzy communication logic.
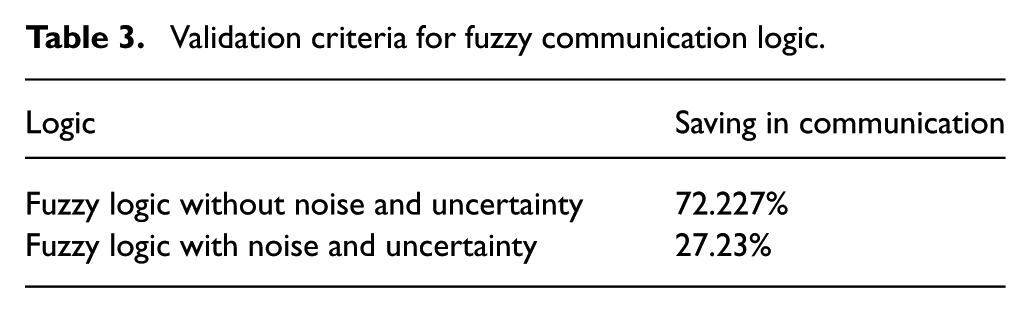
Figure 8(a) and (b) illustrate the estimations obtained using the EKF which has two identical copies on both the master and the slave. On the other hand, the tracking performances of the angle and the position of the inverted pendulum are depicted in Figure 8(c) and (d).
The responses of the system subject to noise: (a) actual and estimated angle value of the master inverted pendulum; (b) actual and estimated value of the cart x position for the master system; (c) angle of the master and slave inverted pendulum; (d) the master and slave cart x position.
In order to investigate the effect of process noise in the system, zero-mean white Gaussian noise is added to the states of the system. The covariance matrix of process noise is assumed to be
Conclusion
In this paper, a novel intelligent network controller has been proposed. One of the main problems during the control of the system is that too much traffic is loaded on to the network which results in high load in the network and long delays in the system. In order to reduce the network traffic, two identical estimators are used: a local estimator and a remote estimator. The local estimator is responsible for estimating the states of the system. If the estimates and the measured values are close to each other, it is possible to reduce the network traffic. On the other hand, if the estimates and the measured values are far from each other, it is required to increase the probability of transmission of measured signals. Since the system to be controlled over a network is non-linear, an EKF is required to estimate the states of the system. Moreover, the communication logic which is used to control the network based on fuzzy logic. The reduction in the amount of communication in the system will reduce the network delay and packet loss caused by high levels of traffic in the control network. PSO is used to minimize the cost function based on error and network traffic. The proposed method has been implemented and has been tested on an overhead crane system. The results have shown that the overhead crane was controlled as desired. In addition, fuzzy communication logic made a compromise between the communication load and system performance. The communication load has been improved 72.227% compared with the no control case. Furthermore, in the case when there exist noise and uncertainties in the system, the network traffic is reduced by 27.23%. As a result, using this method has reduced the communication load of the network drastically.
Footnotes
Appendix
The PSO is an intelligent optimization method which benefits from some key advantages including:
It should be mentioned that in the standard version of the PSO, its local search will have a little weakness. To be more precise, in the PSO algorithm, particles usually converge quickly around the global optimum solution, but local search to find the precise location of the global optimum point sometimes lasts longer, but of course amendments have made to newer versions.
In general, PSO has the following steps.
Declaration of conflicting interest
The authors declare that there is no conflict of interest.
Funding
This research received no specific funding from any funding agency in the public, commercial or not-for-profit sectors.