This paper considers sliding mode control for a class of uncertain switched systems with state and input delays. In the control systems, each subsystem is not required to share the same input channel, which is usually assumed in previous works. By employing a weighted sum of the input matrices, a common sliding surface is designed. The sliding surface includes a predictor to compensate for the input delay of the control systems. To guarantee the asymptotic stability of the sliding motion, a switching signal based on the min-projection strategy is proposed. Moreover, it is shown that the state trajectories can be driven onto the specified sliding surface despite the presence of state and input delays and external disturbances. Finally, a numerical example is given to demonstrate the effectiveness of the proposed method.
During the past decades, switched systems have received a lot of consideration, since they play an important role in modelling engineering systems with time-triggered hybrid features, e.g. chemical process systems, communication systems and networked control systems subject to package loss (Cheng et al., 2005; Morse, 1996). Switched systems are composed of a family of subsystems and a switching device, which produces the switching signals that orchestrate the switching among subsystems. It is noted that there are some special characteristics on switched systems. For example, the whole switched system may be unstable, even if each subsystem is stable. Therefore, many efforts have been focused on the stability and stabilization of switched systems (see the work by Liberzon and Morse, 1999; Zhang et al., 2015; Zhao et al., 2015 and the reference therein). More recently, the sliding mode control (SMC) strategy has been extended to switched systems (Lian et al., 2009; Wu and Lam, 2008; Wu et al., 2011).
As is well-known, the SMC strategy is an effective robust control method due to its strong robustness against parameter uncertainties and external disturbances. Therefore, it has been widely used in engineering control systems, such as vehicle active suspensions (Ozer et al., 2017), mobile robot (Xu et al., 2014) and half car models (Yagiz et al., 2008). Recently, Wu and Lam (2008) considered SMC for a class of switched systems with state delay, whose method was further extended to stochastic switched systems in the work by Wu et al. (2011). Besides, Lian et al. (2009) discussed the robust SMC problem for a class of uncertain switched systems. More recently, Liu et al. (2015) further considered the switched systems with different input matrices for each subsystem and constructed a common sliding surface via a weighted sum approach.
On the other hand, time delay is frequently encountered in many engineering systems, which include after-effect phenomena in their inner dynamics. Moreover, time delay may cause undesirable behaviours of the control systems and even lead to instability (Richard, 2003). Therefore, it is necessary to research the stability of systems with state delay or input delay. Recently, many constructive methods have been proposed on state-delay systems (Hu et al., 2012; Mazenc and Malisoff, 2016) and input-delay systems (Wang et al., 2007; Yue, 2004; Yue and Han, 2005). Moreover, some results based on SMC techniques have been also presented to deal with input delay in the control systems (Gouaisbaut et al., 2002; Roh and Oh, 1999; Xia et al., 2007). Among them, Roh and Oh (1999) investigated SMC for a class of uncertain linear input-delay systems with nonlinear parametric perturbations, in which a sliding surface including a predictor to compensate for the input delay was proposed. Later, the results were extended to uncertain discrete-linear systems, in which a predictor in discrete time is introduced (Xia et al., 2007). More recently, the results were further extended to uncertain nonlinear systems (Kamalapurkar et al., 2016). However, it is worth noting that in the previous results, there are few works involving in switched systems subject to state and input delays. The time delay within a SMC can cause oscillations around the sliding surface (see the work by Choi and Hedrick, 2016, and the references therein), especially given input delay. Moreover, both the characteristics of switched systems and the structure of SMC make this work not trivial and cannot be simply obtained from existing results. This motivates the present study.
Motivated by the discussion above, we will consider the problem of SMC for a class of uncertain switched systems subject to state and input delay. Our main contribution consists of the following two aspects.
Each subsystem in the control systems is not required to share the same input channel, which is different from the existing works. A weighted sum of the input matrices, as in the work by Liu et al. (2015), is proposed to construct a common sliding function. Moreover, to compensate for the input delay, the sliding surface including a predictor is introduced.
By designing a switching signal dependent on the time and state simultaneously, the asymptotic stability of the sliding mode dynamics is analysed.
The remainder of this paper is organized as follows. In the ‘Problem statement’ section, the switched system is described and the problem is formulated. A common integral sliding surface is designed in the ‘Sliding surface design’ section. The ‘Main results’ section formulates the main results based on the SMC method. A simulation example is given in the ‘Simulation’ section. Finally, the ‘Conclusions’ section draws conclusions.
Problem statement
Consider the following switched systems with state and input delays
where is the state, is the control input, and represent the delay of the state and the control input respectively, , , and are known matrices, is the external disturbance satisfying , with a positive scalar and is a piecewise constant function of time called a switching signal which can be characterized by the switching sequence . Moreover, means that the -th subsystem is activated when .
For each possible value , we will denote the system associated with the -th mode by
The objective of this work is to design a SMC law such that the stability of the switched systems given by equation (1) can be guaranteed despite the presence of the state and input delays. To this end, some preliminaries are first introduced, which are useful for the development of the main results.
Assumption 1.The matrix is full column rank, that is, rank .
It is worth noting that in the switched systems given by equation (1) the input matrix for each subsystem is not necessarily the same, which is different from the previous works (Lian et al., 2009; Wu and Lam, 2008; Wu et al., 2011). To cope with this difficulty, the following weighted sum of the input matrices, as in the work by Liu et al. (2015), is introduced
where is a parameter satisfying with and being known constants.
Remark 1.It is noted from equation (2) that the weighted coefficients are required to be bounded. Moreover, it can be shown from Assumption 1 that is full column rank. That is, for general choice of scalars it can be obtained that is full column rank.
Then, denote
It can be shown that , with .
Taking the above definition into account, the systems given by equation (1) can be rewritten as
Sliding surface design
In this part, the sliding surface will be designed. It is worth noting that if a mode-dependent sliding surface is designed, it will be difficult to analyse the convergence of the state trajectory as it jumps from one sliding surface to another. Therefore, a common sliding surface is designed as follows
with
where and the matrix will be given later. It is easily shown that, the non-singularity of the matrix can be guaranteed, since is of full column rank.
Differentiating with respect to yields
Remark 2.It should be pointed out that the matrix is required to be non-singular. Hence, the parameters , , should be selected such that the non-singularity condition is satisfied.
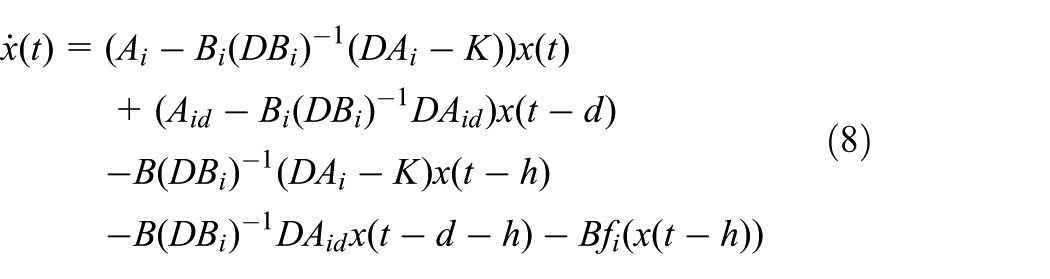
In view of sliding mode theory, we have and when the state trajectory of the system enters the sliding mode. Hence, the following equivalent controller is derived
In the following part, we will analyse the asymptotic stability of the sliding mode dynamics given by equation (8).
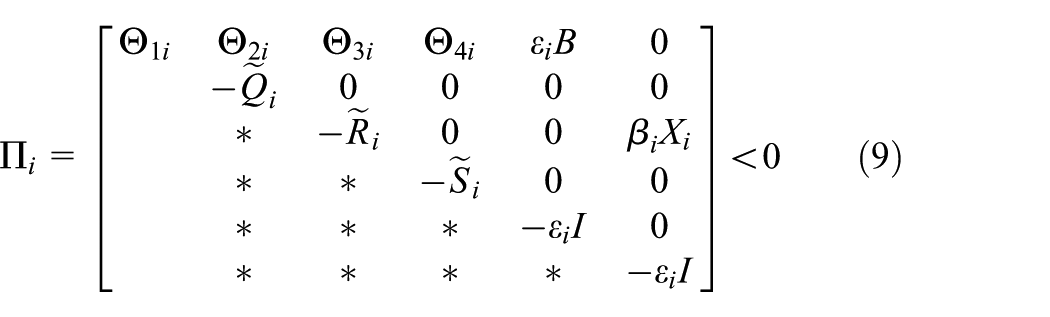
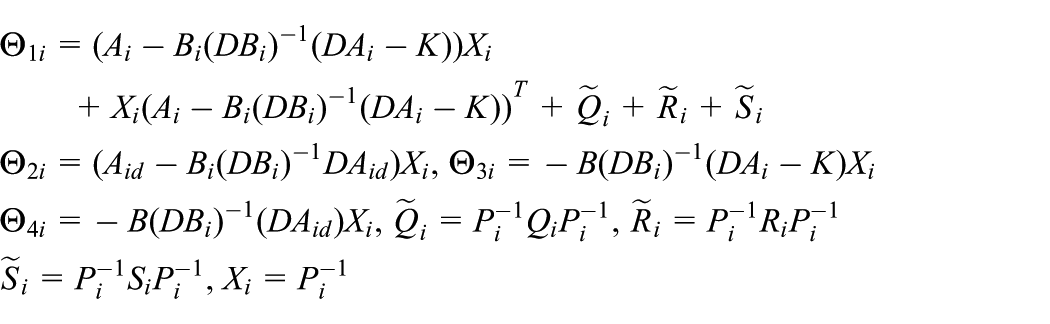
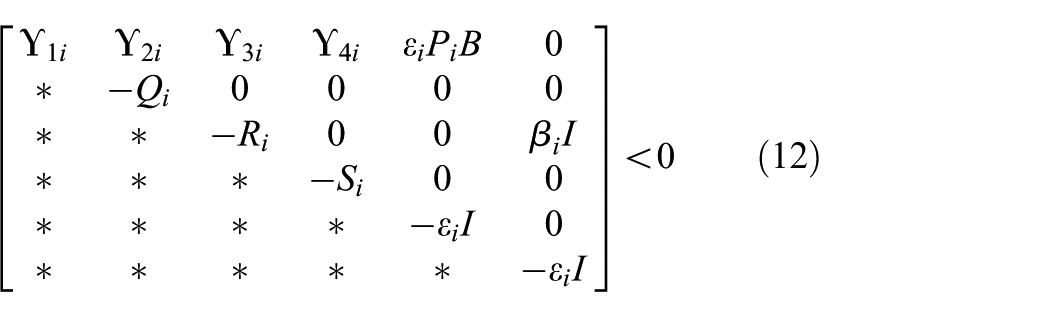
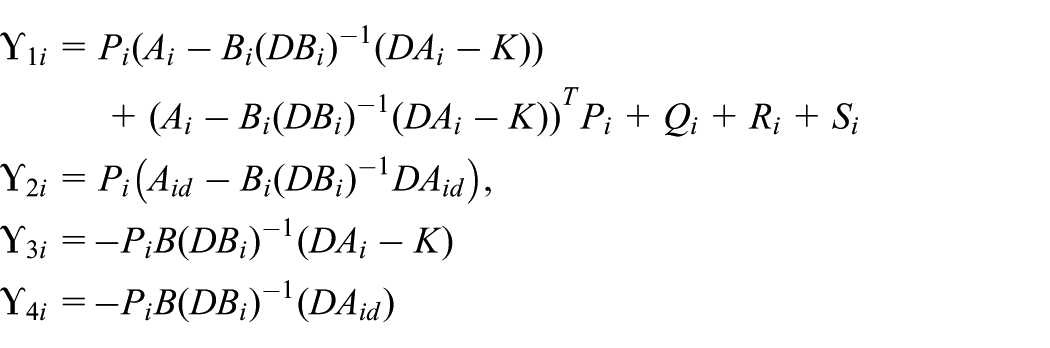
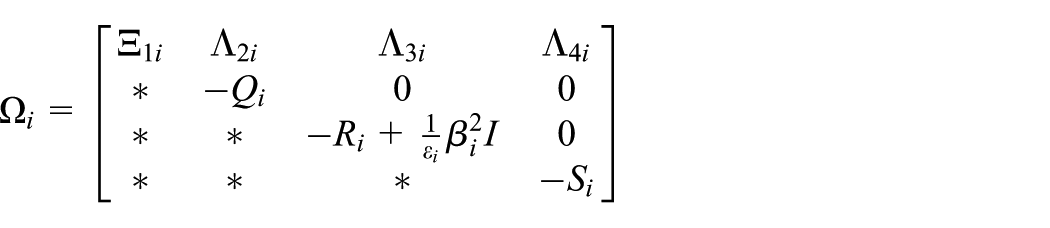
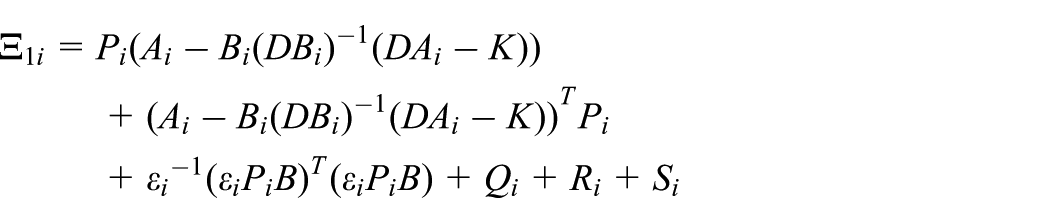
Theorem 1.Consider the switched systems given by equation (1) satisfying Assumption 1, if there exist matrices , , , and scalars , , satisfying the following linear matrix inequality (LMI)
where
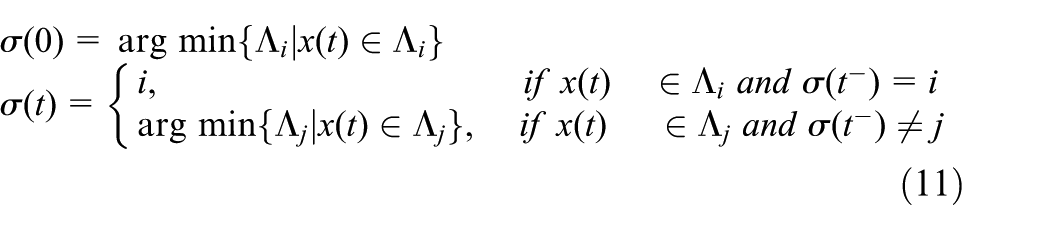
then for each, with the switching region
and the switching signal based on the min-projection strategy
the sliding mode dynamic system given by equation (8) is asymptotically stable, where will be given in equation (13).
Proof. By multiplying and its transpose on the left and right side of equation (9), one has
where
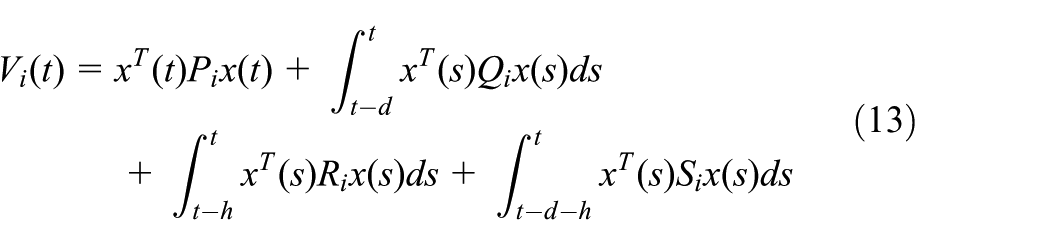
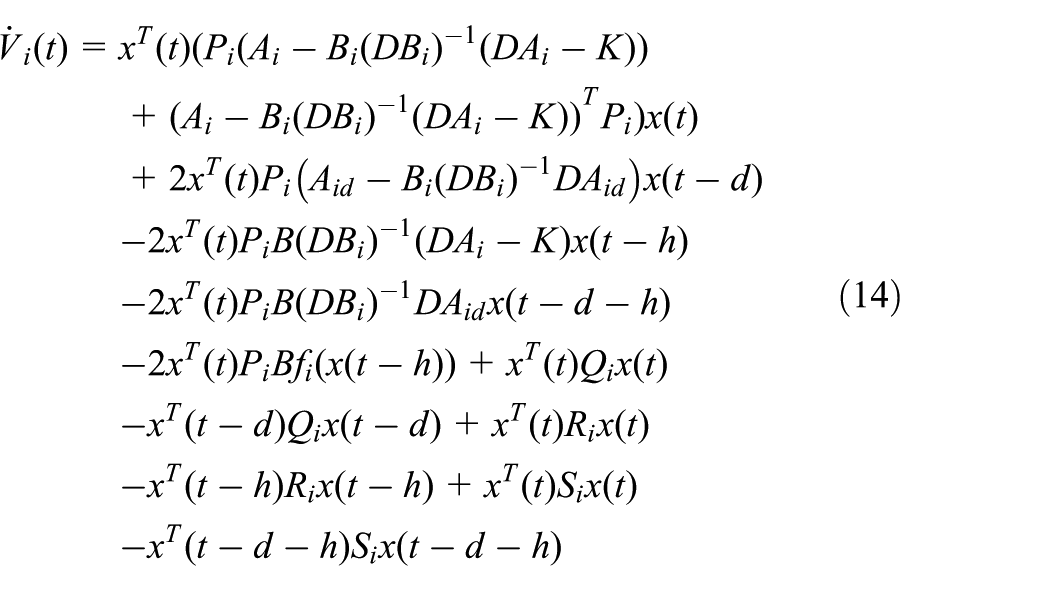
Then, for the -th subsystem, consider the multiple Lyapunov functions of equation (8) as
By Schur’s complement it can be seen that is implied by equation (12). This together with equation (16) yields , which means that each subsystem of the systems given by equation (8) is asymptotically stable.
Considering the switching region given by equation (10), the boundary of the switching region is obtained as follows
In view of the switching signal given by equation (11), it can be seen that if and , the state trajectory will remain in . Therefore, the switchings take place only on boundary . Thus, when , one has
at any switching instant .
According to the stability theory of switched systems based on multiple Lyapunov functions, it can be derived that the sliding mode dynamics given by equation (8) are asymptotically stable, which completes the proof.
Remark 3.Obviously, for any , there exists an such that . Hence, the definition of makes sense and . Moreover, the switching signal given by equation (11), dependent on both the time and state, is proposed such that the sliding motions on the boundary of the switching region can be avoided in the switching control.
In the following theorem, an SMC law will be given to guarantee the reachability of the sliding surface.
Theorem 2.For the switched systems given by equation (1) satisfying Assumption 1, the sliding surface is designed as equation (4). If the SMC law is designed as
where is a positive scalar, then the sliding surface can be reached in finite time and remain there in the subsequent time.
This means that the state trajectories of the systems given by equation (3) will be globally driven onto the sliding surface in finite time and remain there in the subsequent time, which completes the proof.
Simulation
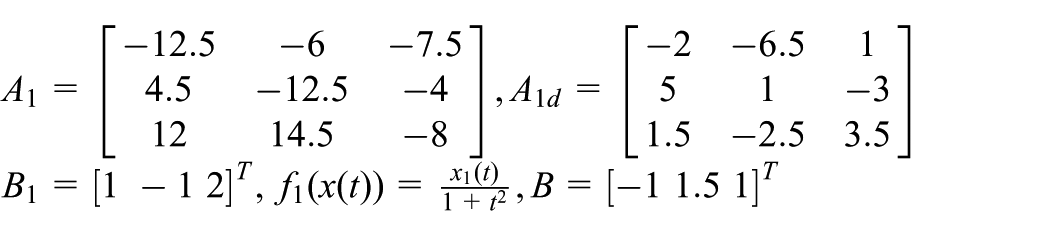
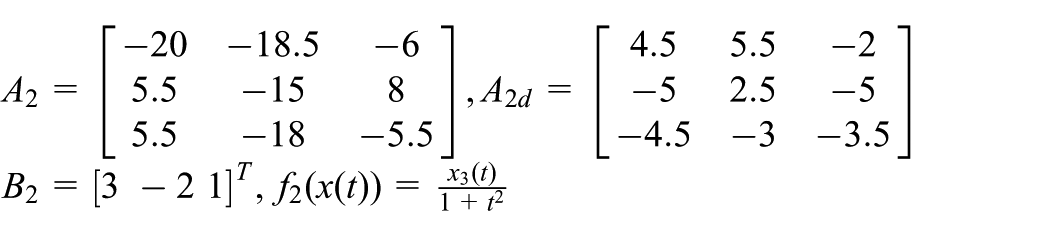
Consider the switched systems in equation (1) with two modes and parameters as follows.
Subsystem 1
Subsystem 2
Additionally, the state and input delays are supposed to be , .
For parameters and matrix , solving the LMIs given by equation (9) yields
Thus, the desired sliding surface given by equation (4) is designed as
For the initial states , it follows from equations (10) and (11) that and
In view of equation (17), the sliding mode controller is designed as
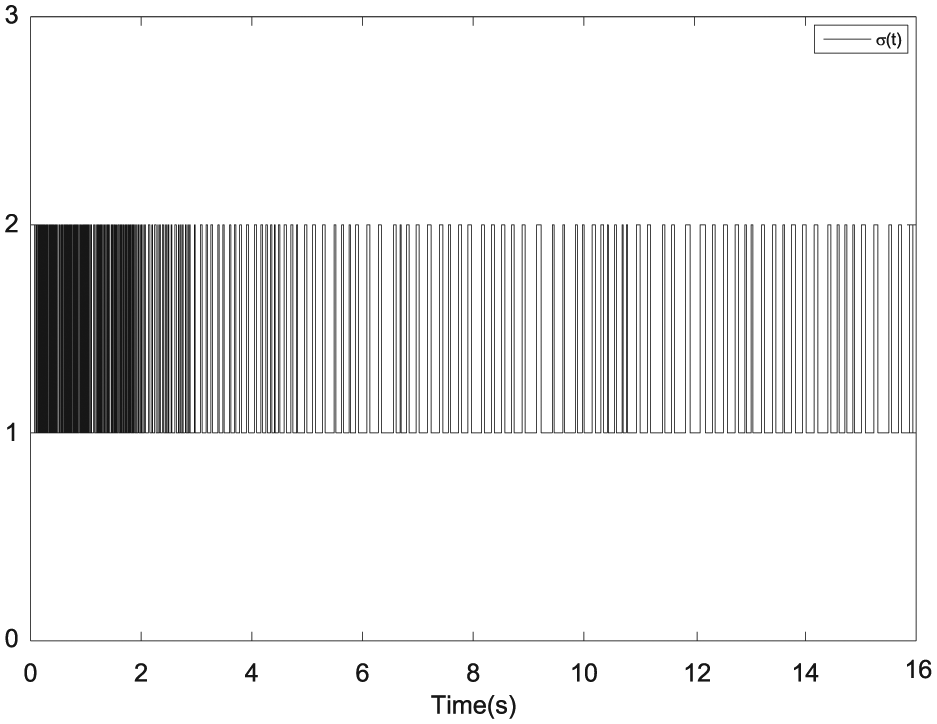
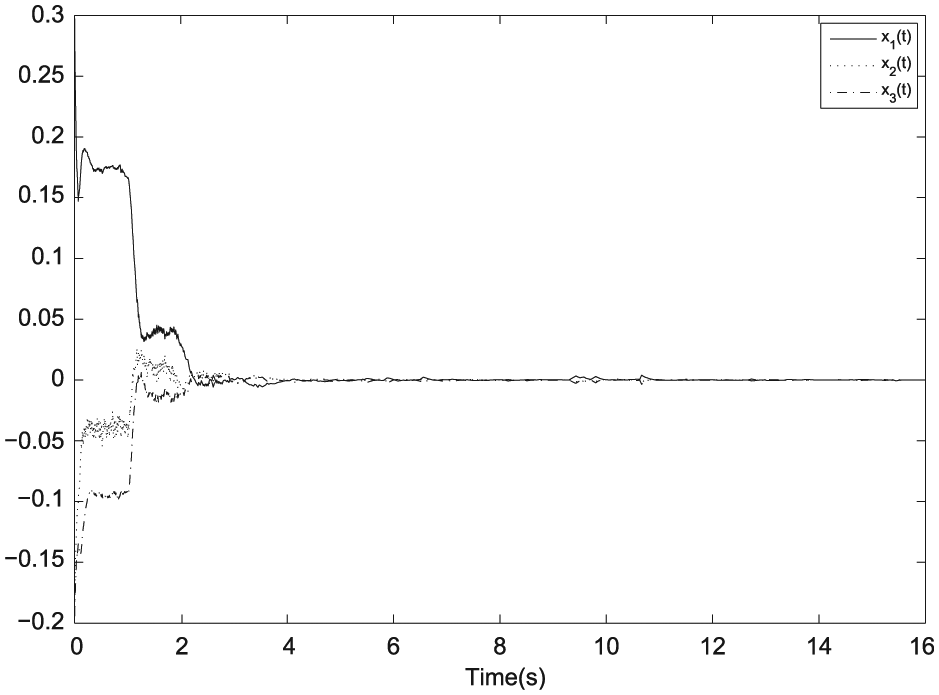
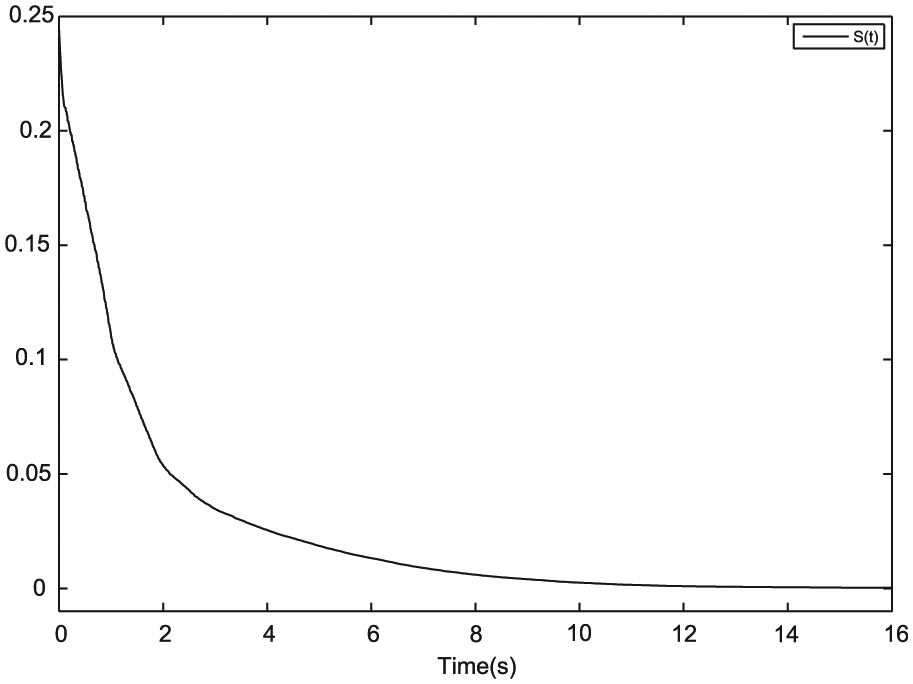
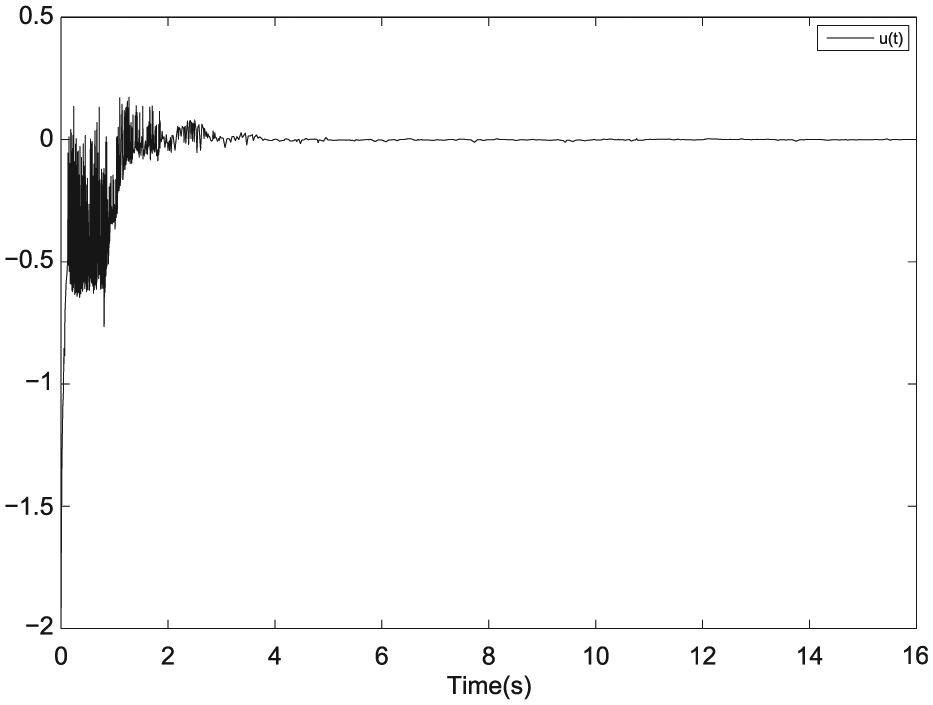
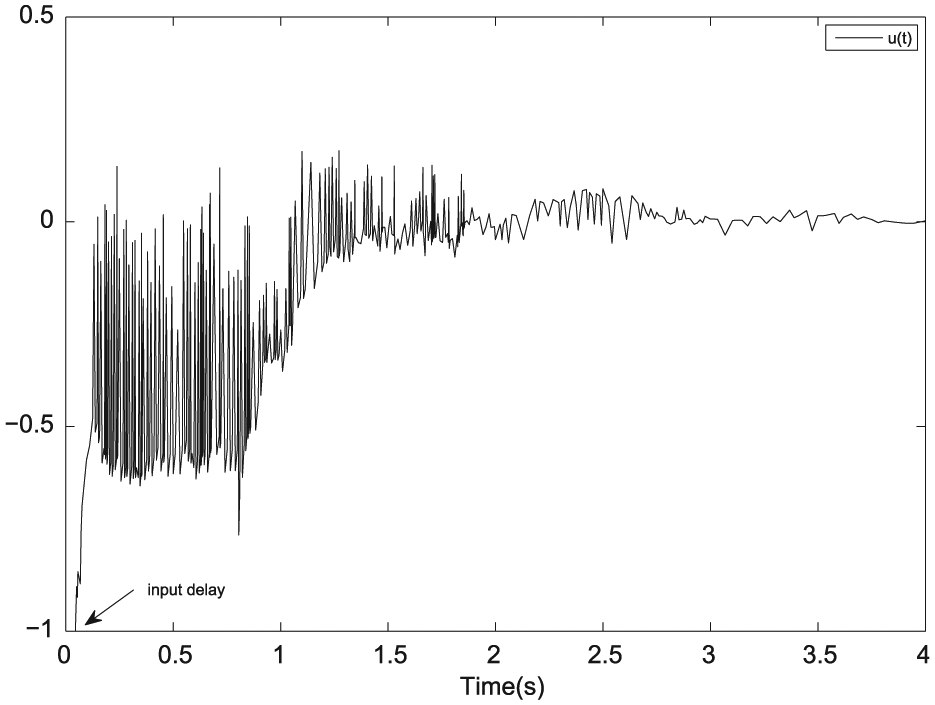
To attenuate the chattering, the function is replaced by . Then, by choosing the parameters and , the simulation results are shown in Figures 1 to 5. The switching signal is given in Figure 1. The control signal is depicted in Figure 4. It can be shown from Figure 2 that the state components , and will be driven onto the specified sliding surface . The time delay of the control input is shown in the partially enlarged control signal in Figure 5. Therefore, the proposed method in this work can effectively cope with the effects of the state and input delays and the external disturbances.
Switching signal .
State trajectories .
Sliding variable .
Control signal .
Partially enlarged control signal .
Conclusions
In this paper, we have discussed SMC for a class of uncertain switched systems with state and input delays, in which a weighted sum of the input matrices has been proposed to remove the requirement that the input matrix for each subsystem is the same. Moreover, a common sliding surface has been constructed. Obviously, the proposed method in this work has wider application fields. In the present results, the input channels of the input delay are different, which will be further investigated in future research.
Footnotes
Appendix
Declaration of conflicting interests
The authors declare no conflict of interests.
Funding
This work was supported by the Shanghai project funding for training of young teachers in colleges and universities (grant number 15U02) and the National Natural Science Foundation of China (grant number 6167317).
References
1.
ChengDGuoLLinYet al. (2005) Stabilization of switched linear systems. IEEE Transactions on Automatic Control50(5): 661–666.
2.
ChoiSBHedrickJK (1998) An observer-based controller design method for improving air/fuel characterization of spark ignition engines. IEEE Transactions on Control Systems Technology6(3): 325–334.
3.
GouaisbautFDambrineMRichardJP (2002) Robust control of delay systems: A sliding mode control design via LMI. Systems & Control Letters46(23): 219–230.
4.
HuJWangZGaoHet al. (2012) Robust H∞ sliding mode control for discrete time-delay systems with stochastic nonlinearities. Journal of the Franklin Institute349(4): 1459–1479.
5.
KamalapurkarRNicholas FischerNObuzSet al. (2016) Time-varying input and state delay compensation for uncertain nonlinear systems. IEEE Transactions on Automatic Control61(3): 834–839.
6.
LianJZhaoJDimirovskiGM (2009) Robust H∞ sliding mode control for a class of uncertain switched delay systems. International Journal of Systems Science40(8): 855–866.
7.
LiberzonDMorseAS (1999) Basic problems in stability and design of switched systems. IEEE control systems19(5): 59–70.
8.
LiuYHJiaTNiuYet al. (2015) Design of sliding mode control for a class of uncertain switched systems. International Journal of Systems Science46(6): 993–1002.
9.
MazencFMalisoffM (2016) Stability analysis for time-varying systems with delay using linear Lyapunov functionals and a positive systems approach. IEEE Transactions on Automatic Control61(3): 771–776.
10.
MorseAS (1996) Supervisory control of families of linear set-point controllers. Part 1: Exact matching. IEEE Transactions on Automatic Control41(10): 1413–1431.
11.
OzerHOHaciogluYYagizN (2017) High order sliding mode control with estimation for vehicle active suspensions. Transactions of the Institute of Measurement and Control. Epub ahead of print, January 30, 2017. DOI:10.1177/0142331216685394.
12.
RichardJP (2003) Time-delay systems: An overview of some recent advances and open problems. Automatica39(10): 1667–1694.
13.
RohYHOhJH (1999) Robust stabilization of uncertain input-delay systems by sliding mode control with delay compensation. Automatica35(11): 1861–1865.
14.
WangYXieLde SouzaCE (1992) Robust control of a class of uncertain nonlinear systems. Systems and Control Letters19(2): 139–149.
15.
WangZGoldsmithPTanD (2007) Improvement on robust control of uncertain systems with time-varying input delays. IET Control Theory and Applications1(1): 189–194.
16.
WuLLamJ (2008) Sliding mode control of switched hybrid systems with time-varying delay. International Journal of Adaptive Control and Signal Process22(10): 909–931.
17.
WuLHoDWCLiCW (2011) Sliding mode control of switched hybrid systems with stochastic perturbation. Systems and Control Letters60(8): 531–539.
18.
XiaYQLiuGPShiPet al. (2007) Sliding mode control of uncertain linear discrete time systems with input delay. IET Control Theory Application1(4): 1169–1175.
19.
XuJXGuoZQLeeTH (2014) Design and implementation of integral sliding-mode control on an underactuated two-wheeled mobile robot. IEEE Transactions on Industrial Electronics61(7): 3671–3681.
20.
YagizNHaciogluYTaskinY (2008) Fuzzy sliding-mode control of active suspensions. IEEE Transactions on Industrial Electronics55(11): 3883–3890.
21.
YueD (2004) Robust stabilization of uncertain systems with unknown input delay. Automatica40(2): 331–336.
22.
YueDHanQ (2005) Delayed feedback control of uncertain systems with time-varying input delay. Automatica41(2): 233–240.
23.
ZhangLXZhuangSLShiPet al. (2015) Uniform tube based stabilization of switched linear systems with mode-dependent persistent dwell-time. IEEE Transactions on Automatic Control60(11): 2994–2999.
24.
ZhaoXDYinSLiHYet al. (2015) Switching stabilization for a class of slowly switched systems. IEEE Transactions on Automatic Control60(1): 221–226.