
Abstract
This paper investigates the problem of designing a non-fragile polynomial fuzzy controller for a class of polynomial fuzzy models subjected to persistent bounded disturbances and system uncertainty. The proposed controller is considered to satisfy the input saturation constraint. Furthermore, the resilient controller is affected by linear fractional uncertainties. The overall structure of the controller is obtained by the polynomial parallel distributed compensation concept. The sufficient conditions guarantee an L1 performance of the perturbed system and exponential stability of the non-perturbed system is achieved in terms of sum-of-squares decomposition conditions. Subsequently, the sum-of-squares-based conditions lead to minimization of the L1 performance such that the above-mentioned hard constraints on the control input and robustness of the closed-loop system against the system and controller uncertainties will be guaranteed. The controller gain matrices will be achieved by numerically solving the sum-of-squares-based conditions with the third-party MATLAB toolbox ‘SOSTOOLS’. Finally, extensive studies and hardware-in-the-loop simulations on a ball-and-beam system are presented, which illustrate the proposed controller can accurately and smoothly track the set point frequency. Furthermore, the proposed control approach is more robust over prior-art controllers for all the simulation scenarios.
Keywords
Introduction
Most of the real-world processes are inherently non-linear. One of the ways to deal with the non-linearity problem of these systems is to utilize the well-known Mamdani or Takagi–Sugeno (TS) fuzzy models (Abadi and Khooban, 2015; Ben Yazid et al., 2017; Dehghani et al., 2016; Khooban et al., 2017). The TS fuzzy models are described by fuzzy blending of some local subsystems (Song et al., 2016). Depending on the consequent part of the fuzzy IF-THEN rules, the TS fuzzy model is called a linear (Zhang et al., 2016), ane (Beyhan, 2017; Wang et al., 2016), bilinear (Chang and Hsu, 2016; Hamdy and Hamdan, 2015) and polynomial (Mardani et al., 2017b; Vafamand et al., 2017b; Zhou and Zeng, 2017) fuzzy model. The simplicity of the TS-based fuzzy control makes this method a very intresting research field (Khooban et al., 2016). Originally, the parallel distributed compensation (PDC) and non-PDC schemes were widely employed for the linear TS fuzzy systems through linear matrix (LMI) techniques (Chang et al., 2012; Dong and Yang, 2017; Mardani et al., 2017a). Recently, polynomial (Mardani et al., 2017b; Vafamand et al., 2017b; Zhou and Zeng, 2017) and polynomial fuzzy (Pitarch et al., 2017) controllers have attracted lots of attention to deal with the polynomial and polynomial fuzzy models. Based on the polynomial fuzzy model approach, sufficient stability conditions are derived in terms of sum-ofsquares (SOS) decomposition conditions (Tanaka et al., 2016). Then, in order to solve SOS-based conditions, the third-party MATLAB toolbox ‘SOSTOOLS’ is used (Sturm, 1999).
From a practical viewpoint, the designed controller must struggle with real world system requirements such as:
System uncertainty (Liu et al., 2016b; Yin et al., 2016, 2017). In most of the practical complex plants, deriving an exact model is a hard task or maybe impossible. Also, some of the system parameters may vary due to physical depreciation. So, considering the system uncertainty in designing a practical controller is an important task.
Controller uncertainty (Tandon and Dhawan, 2016; Wu et al., 2017; Zhang et al., 2007). The designed controller is assumed to be exactly implemented to real-world systems. However, because of several uncertainties and inaccuracies that may happen during the implementation procedure, it is difficult to exactly apply the controller to practical system. These unmodelled behaviours may be caused by implementing digital controller, ageing of the controller components, and numerical computation approximation. Hence, it is necessary to design a controller, which is insensitive to the gain variations. Such a controller is well-known as a non-fragile controller.
Actuator saturation (Vafamand et al., 2016; Zhai and Xia, 2016). Actuator saturation is one of the most usual non-linearity sources. Due to the physical restrictions, applying high amplitude control signal is not applicable in the real world processes. Actuator saturation can severely decrease the closed-loop system performance and sometimes may lead to closed-loop instability. So, it should be considered in the controller design procedure to avoid any performance degradation.
Persistent bounded external disturbance. In several applications, the external disturbance belongs to norm-
In recent years, several LMI- and SOS-based approaches have been developed to handle the above-mentioned issues. In the work by Vafamand et al. (2016), the problem of designing a robust
In the work by Vafamand et al. (2017b), a non-iterative input saturation constrained polynomial controller was proposed. Although, the obtained conditions were convex, the problems of external disturbance and a resilient controller were not addressed. Cao et al. (2014) studied a robust controller synthesis of uncertain polynomial fuzzy model. However, in the work by Cao et al. (2014), the sensitivity of the controller against the gain uncertainty and the actuator saturation were not discussed. Unfortunately, the problem of designing a robust polynomial fuzzy controller against the persistent bounded disturbance inputs has not been studied yet. Furthermore, the existing results are confined to LMI-based conditions (Vafamand et al., 2017a,b). According to the best knowledge of the authors, designing a non-fragile
This paper seeks to provide a framework to design a saturated polynomial
The rest of this paper will be organized as follows: the ‘Preliminaries’ section briefly investigates polynomial fuzzy modelling and the non-fragile polynomial fuzzy controller with hard constraints. Stability analysis of the closed-loop polynomial fuzzy model based (FMB) system will be studied in the ‘Stability analysis’ section. For demonstration of the performance and robustness of the proposed control system, experimental validation using the HiL simulation will be given in the ‘Numerical example’ section. Finally, the conclusions will close the paper in the final section and the ‘Notation’ section can be found in the Appendix.
Preliminaries
Polynomial fuzzy model
Consider the following uncertain polynomial fuzzy model in the presence of persistent bounded external disturbances
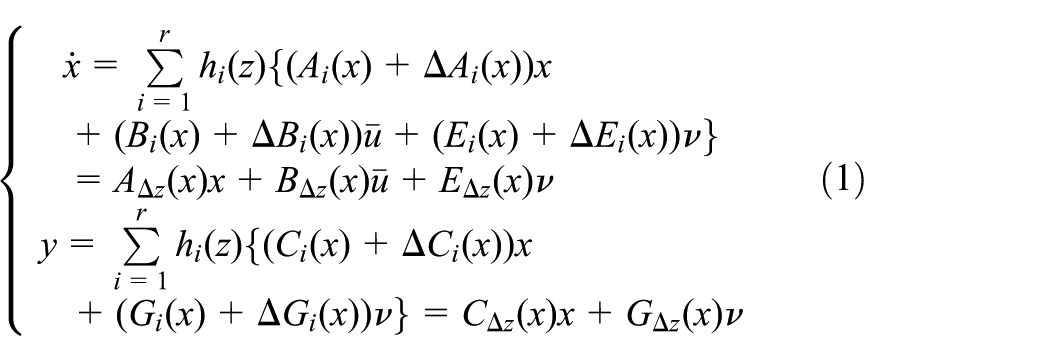
where


where
Saturated non-fragile polynomial fuzzy controller
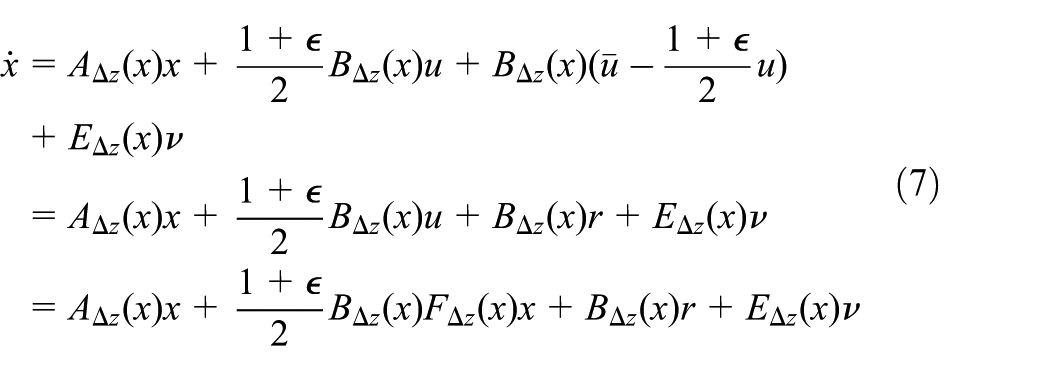
Since actuators typically have saturation limits, it is more logical to define the controller with a saturated function as in the work by Vafamand et al. (2016)

where

where

where
Consider the null term

Assume that
where


the inequality

is held for the saturation constraint.
the inequality
for some scalar values

for some scalar values


holds.


Stability analysis
Due to the existence of persistent bounded disturbance, we seek to provide a robust framework to guarantee the BIBO stability based on the proposed non-fragile polynomial fuzzy controller given by equation (5). Subsequently, the boundedness of the state vector will be guaranteed as

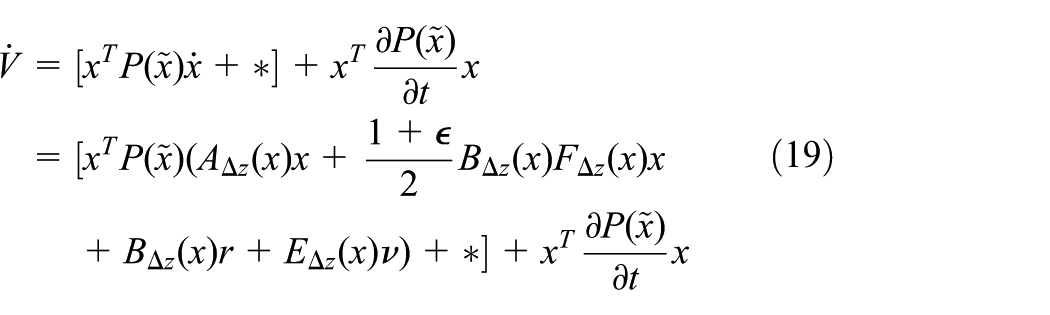
As we have in equation (8), the supremum ratio of the infinity norm of the output to the infinity norm of the input will be minimized. Next, consider the following candidate polynomial Lyapunov function (LF)

where
minimize






where
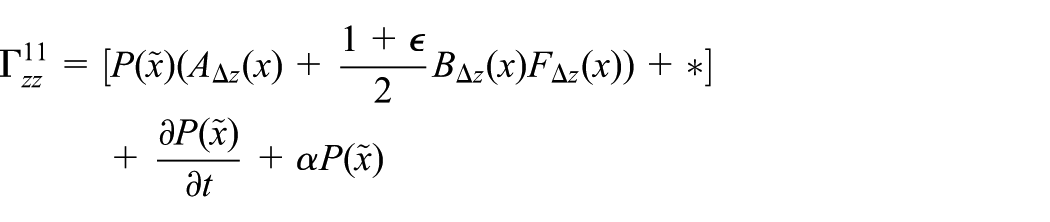
The matrix
Furthermore, the

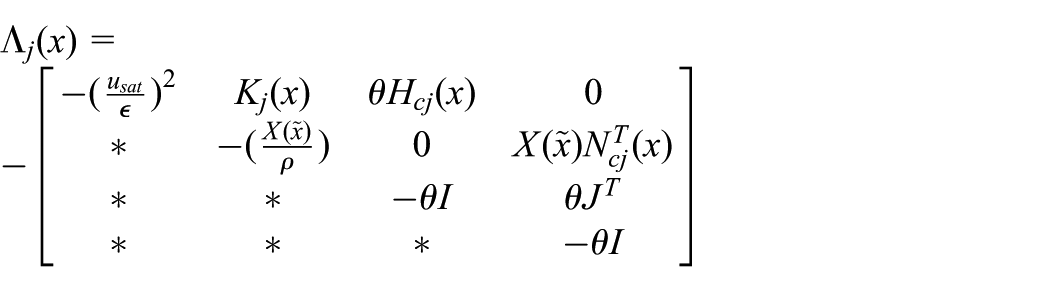
Assume

where

and
One of the diagonal elements of matrix
Then, equation (21) results in
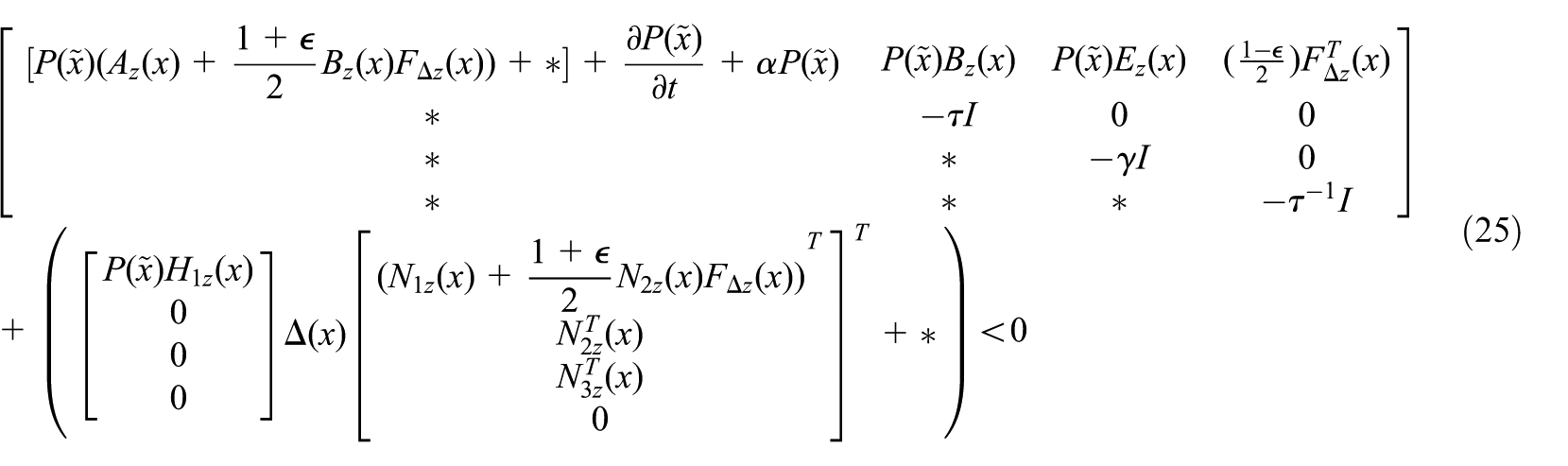
By applying the S-procedure on equation (20) subject to equation (22), one concludes
By employing the Schur complement (Vafamand et al., 2016), one has
In the following, our goal is to remove the system uncertainties
Based on Lemma 2, one has
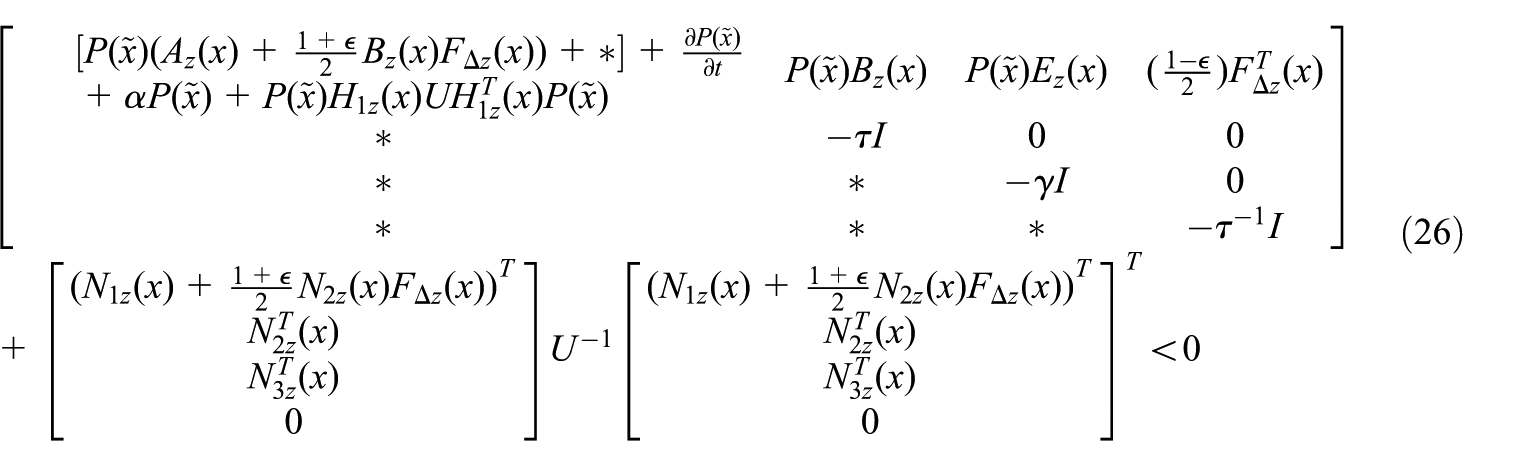
where
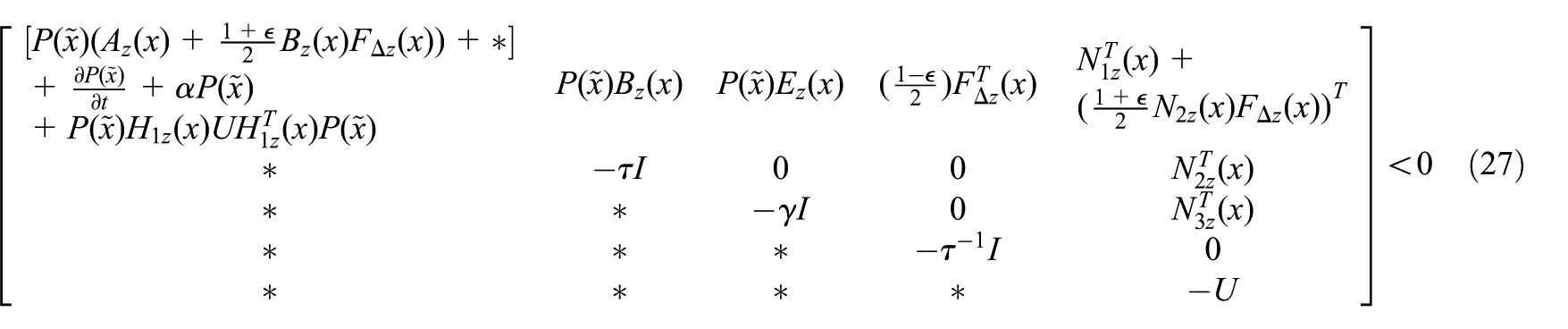
Now, the goal is to remove the controller uncertainty
where
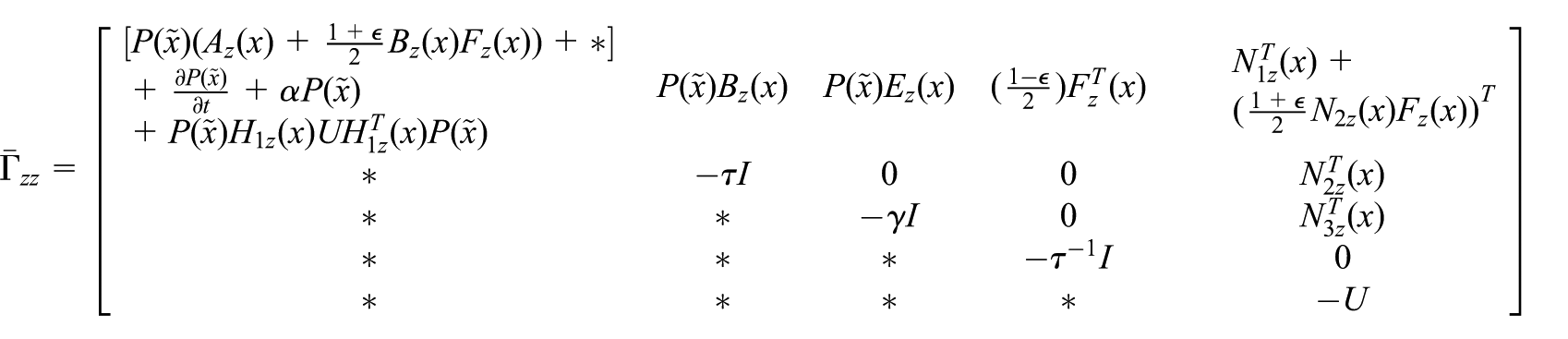
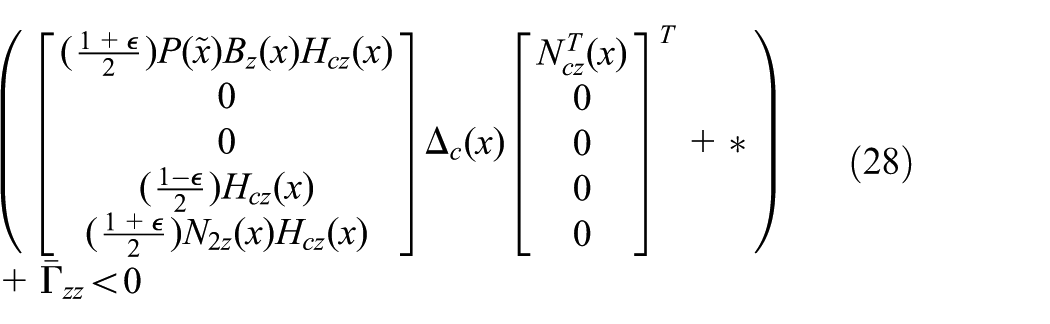
From equation (28) and Lemma 3, one has
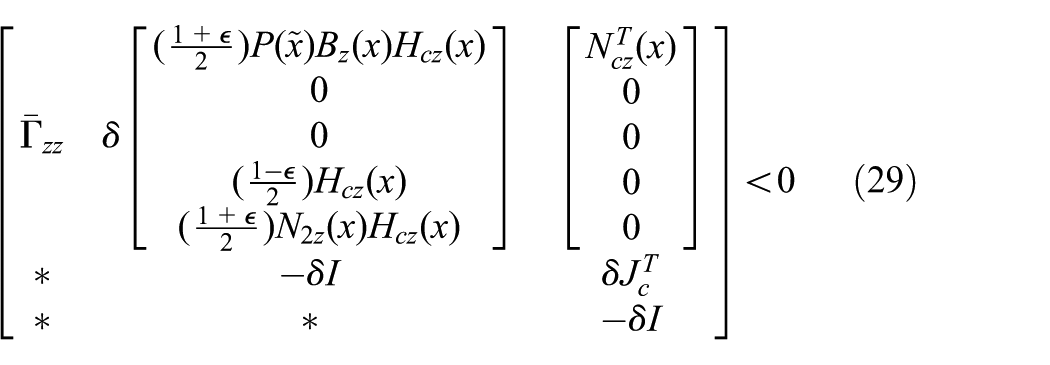
where
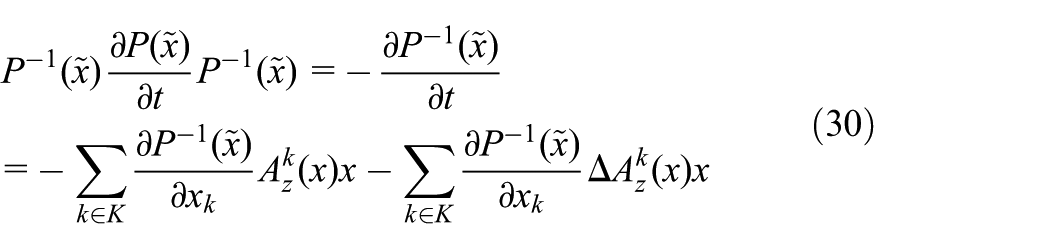
Pre- and post-multiplying equation (29) by the matrix
where
and
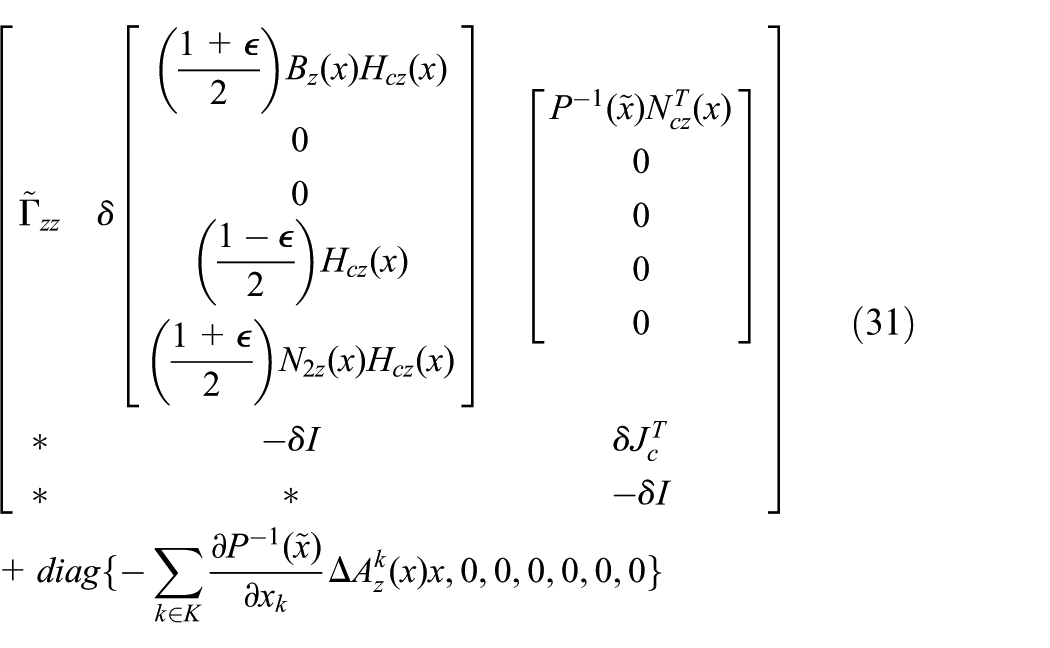
The solution to substituting the definition of
where
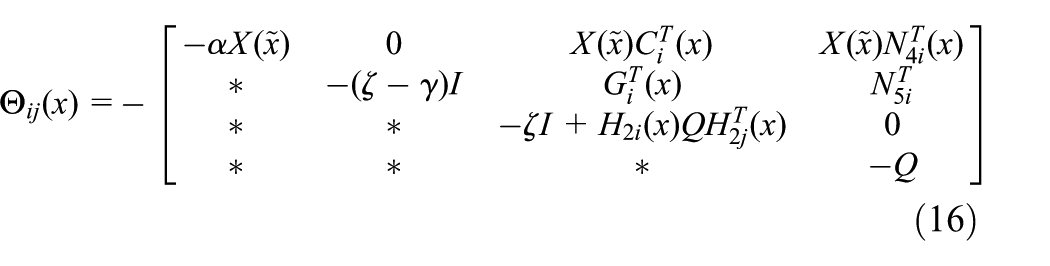
Subsequently, by utilizing the Schur complement and Lemma 4, one has
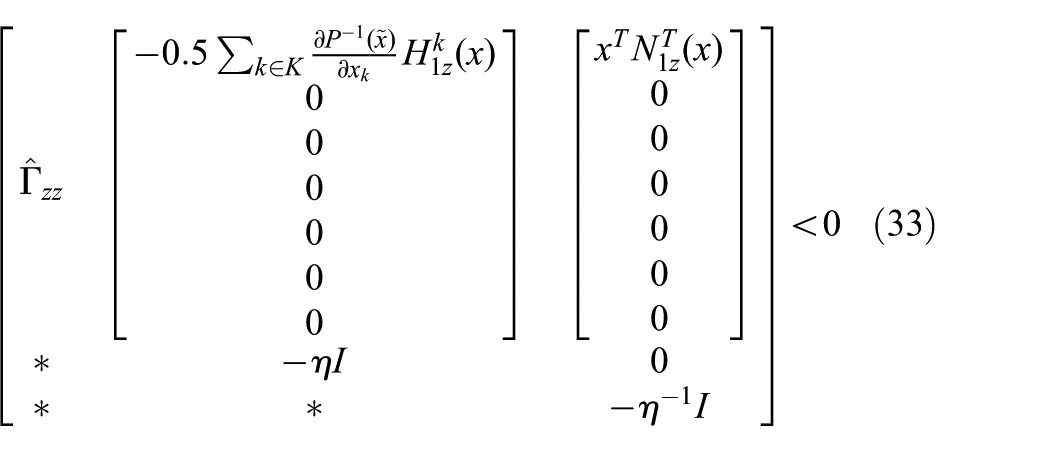
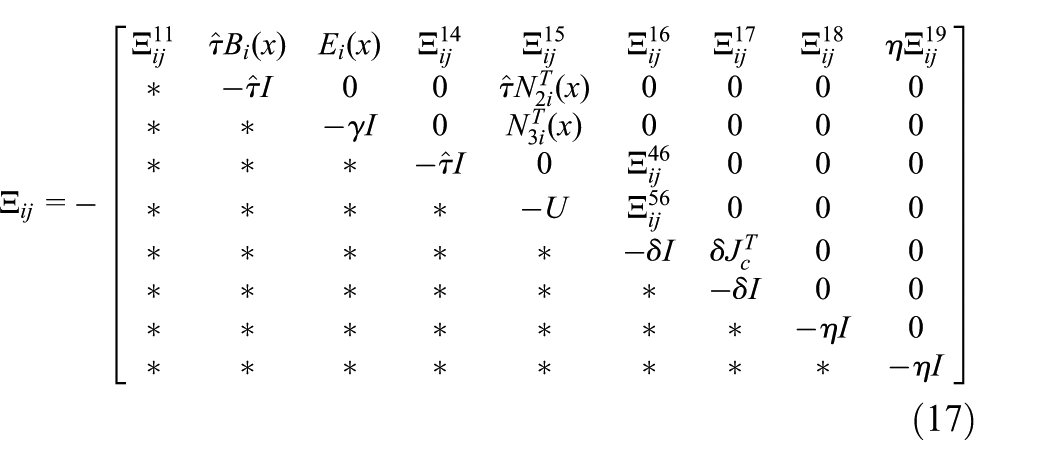
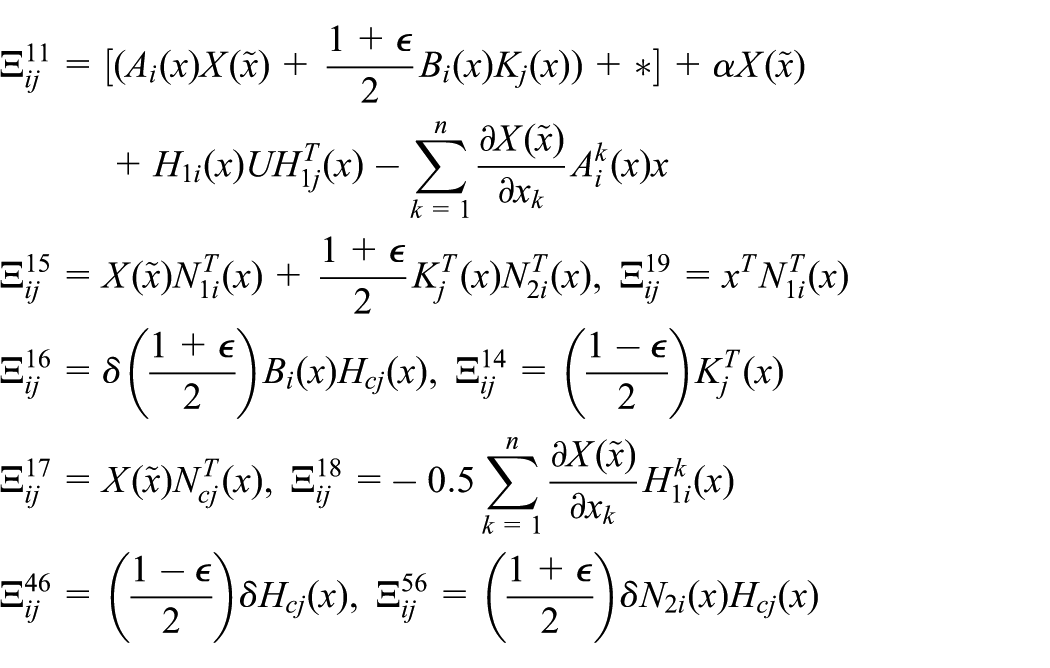
The inequality given in equation (33) is equivalent to equation (34) with the following elements
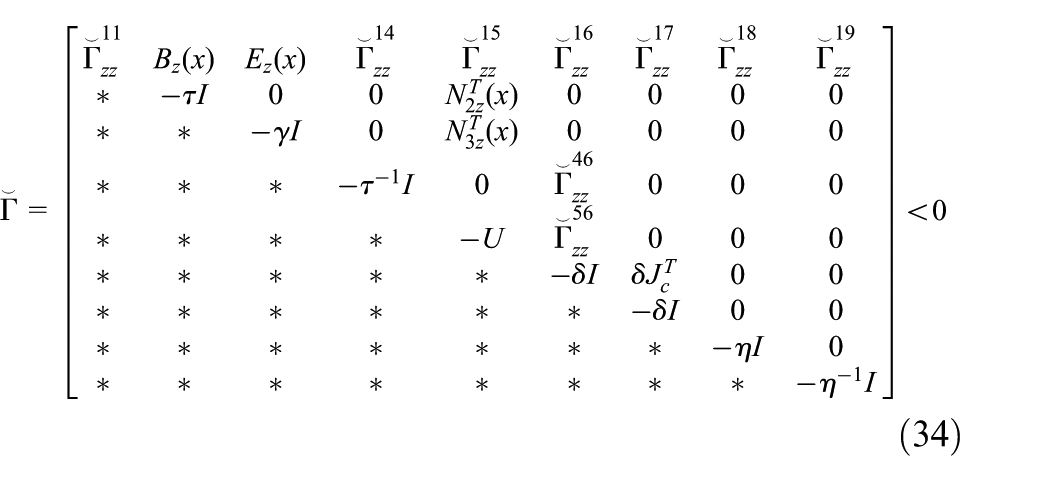
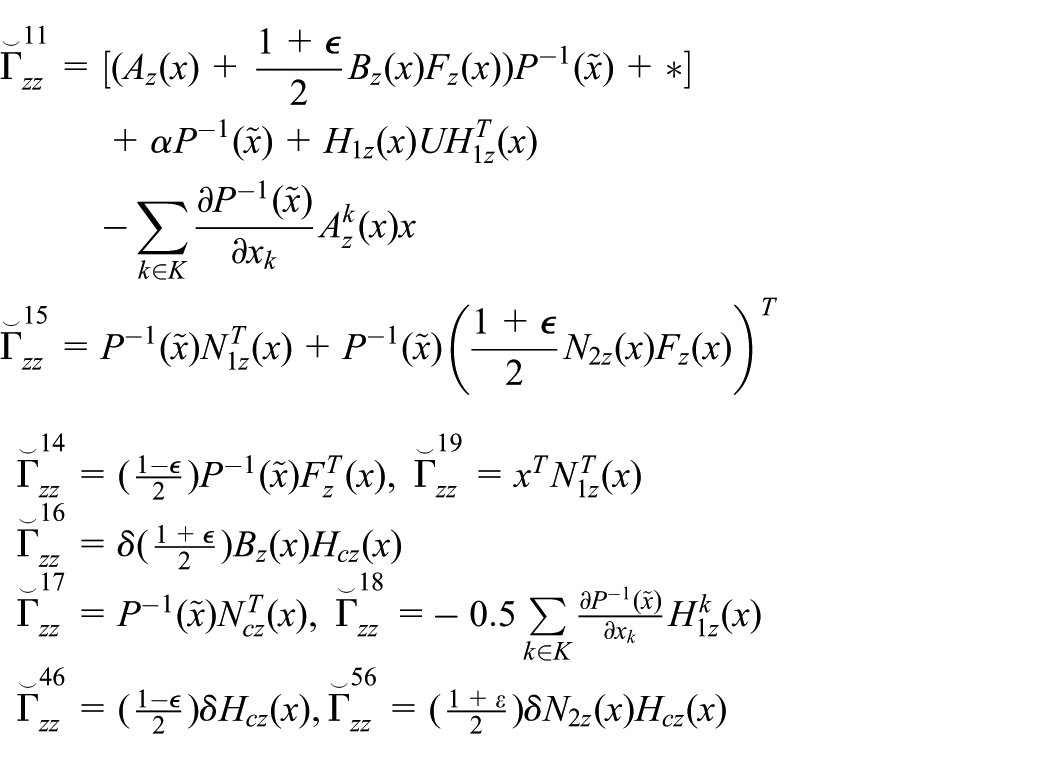
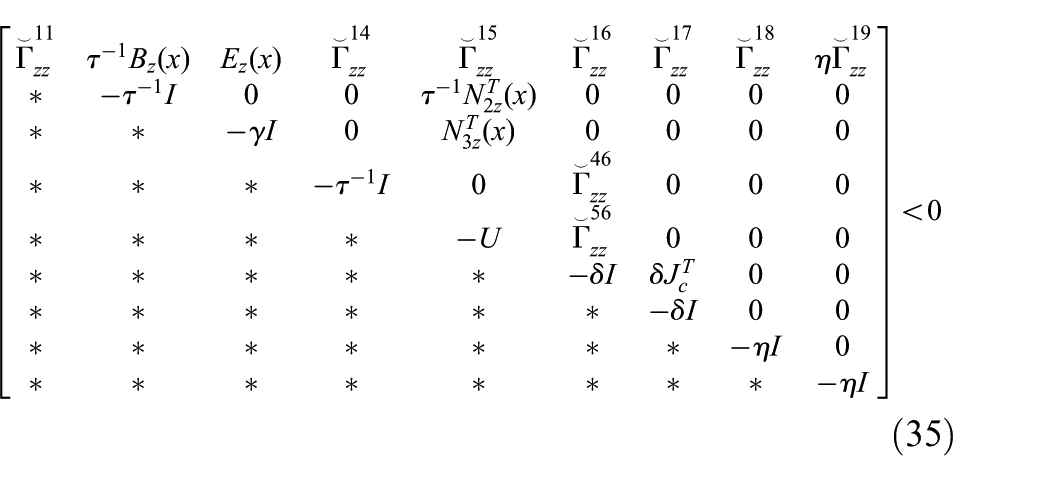
Pre- and post-multiplying equation (34) by
Based on Lemma 5, if equations (11) and (12) are satisfied, then

Recall Lemma 6. It follows from equation (36) that
Assume that the initial condition is zero, the inequality given by equation (37) yields

In order to guarantee the

From equations (1) and (39), one has
Using the Schure complement, equation (40) leads to

Pre and post multiplying equation (41) by

The inequality given by equation (42) is equivalent to
Using Lemma 2, one has
Employing the Schure complement, leads to equation (45).
By employing Lemma 5, equation (45) will be guaranteed, if equations (13) and (14) are satisfied. By substituting equation (38) into equation (39), one has

Subsequently, the

Based on the discussion presented by Du and Zhang (2009), if

holds, then
Pre and post multiplying both sides of equation (48) by
Based on Lemma 3, equation (49) is satisfied if
holds. The constraint given by equation (50) leads to equation (15). Thus, the proof is completed.
From Lemma 1, one knows that in the controller design procedure, the controller input is artificially bounded by
The parameter
The parameter
The above discussion regarding the effect of parameters on the closed-loop performance can represent a way to select the parameters of Theorem 1.
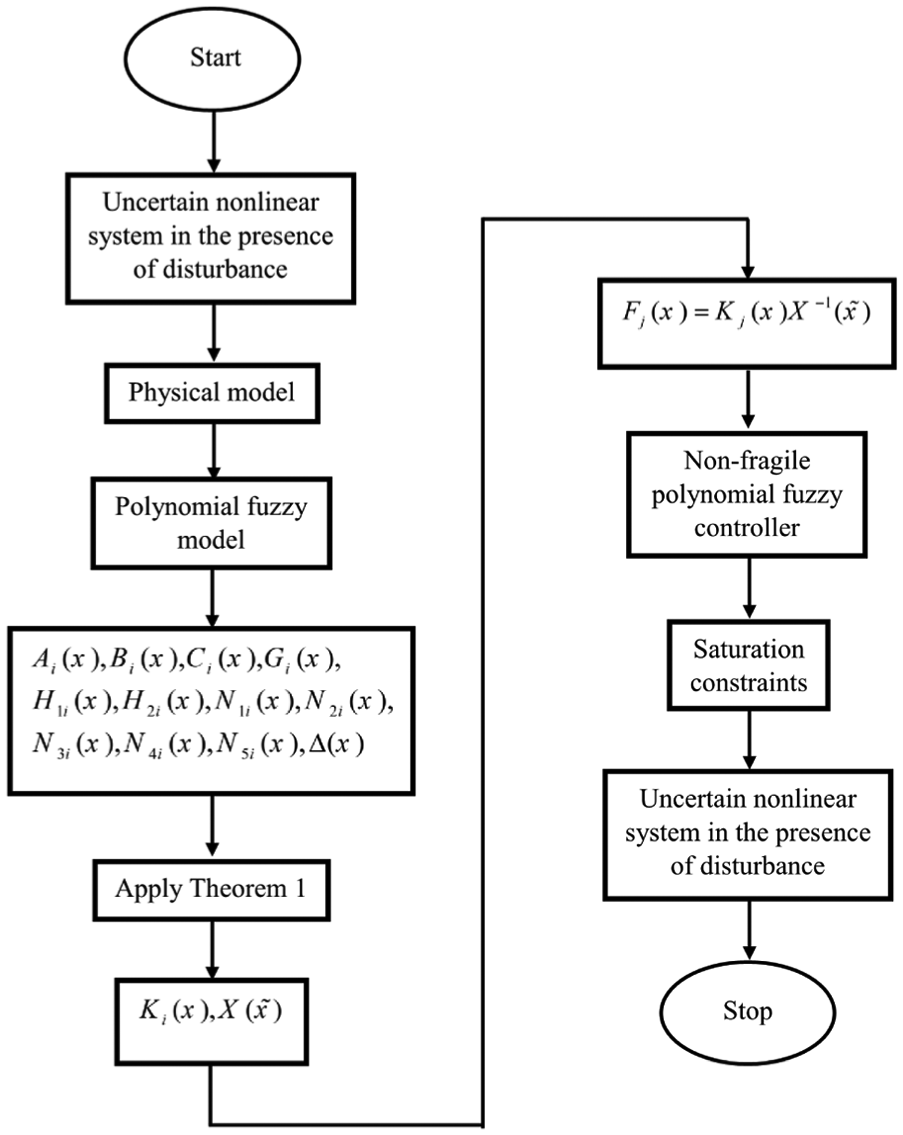
General scheme of the proposed design approach of the controller given by equation (5).
Numerical example
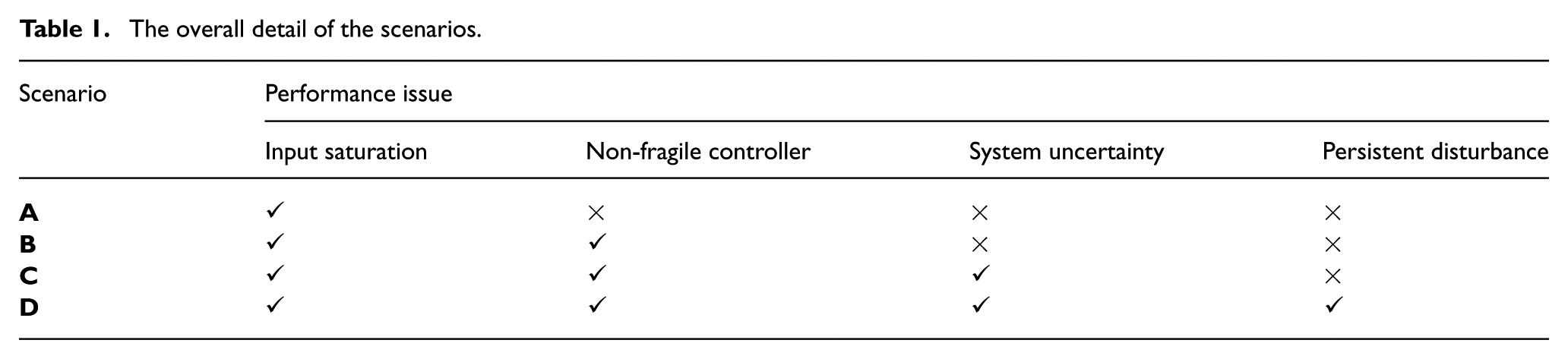
In this section, a practical ball-and-beam system is given to show the merits and effectiveness of the proposed design method. In order to give a comparison and challenge the proposed approach point by point, some scenarios are proposed. The overall detail of the scenarios is presented in Table 1. All of the simulations have been carried out via the third-party MATLAB toolbox SOSTOOLS 3.3. In order to evaluate the performance of the proposed control method, the HIL simulation approach is utilized. The real time HIL method is used to emulate errors and delays that do not exist in classical off-line simulations. Figure 2 gives a schematic diagram of the HIL setup which consists of:
The overall detail of the scenarios.
OPAL-RT as a real-time simulator (RTS);
a PC as the command station (programming host) in which the Matlab/Simulink based code, which will be executed on the OPAL-RT, is generated;
a router that is used as a connector of all the setup devices in the same sub-network.
The OPAL-RT, is also connected to the DK60 board through Ethernet ports.

The real-time experimental setup.
Ball-and-beam system
The ball-and-beam system is described via the following state space model
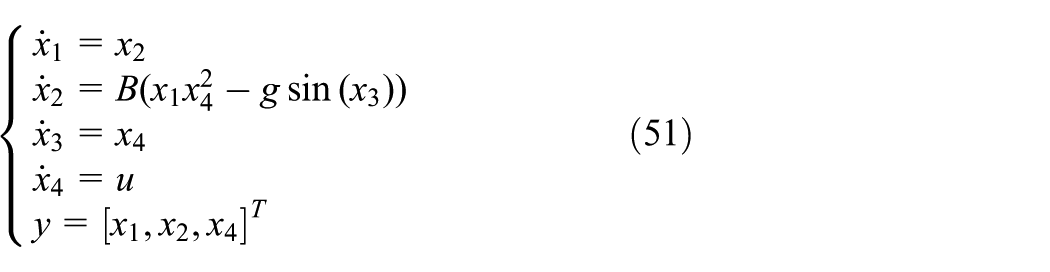
where the states

where
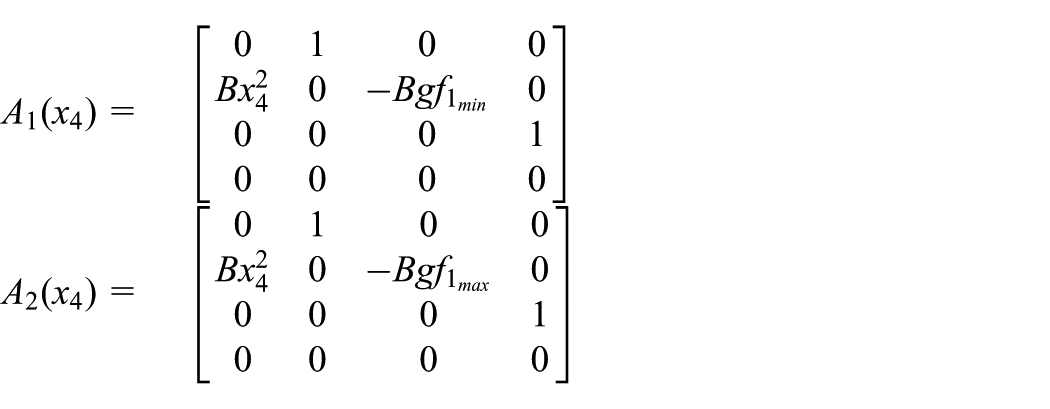


and also

Scenario A
This scenario is presented to compare the results of this paper with the newly published work by Liu et al. (2016a); Vafamand et al. (2016). Since the approach of Liu et al. (2016a) is derived for disturbance-free nominal polynomial fuzzy models, we consider the same assumption and use the system and controller without any uncertainties. And, only the saturation constraint affects the controller. Moreover, the degree of polynomial gain matrices and Lyapunov matrix are chosen to be two and zero, respectively. The saturation bound is selected to be equal to the maximum amplitude of the control signal designed in the work by Liu et al. (2016a) (i.e.
Let
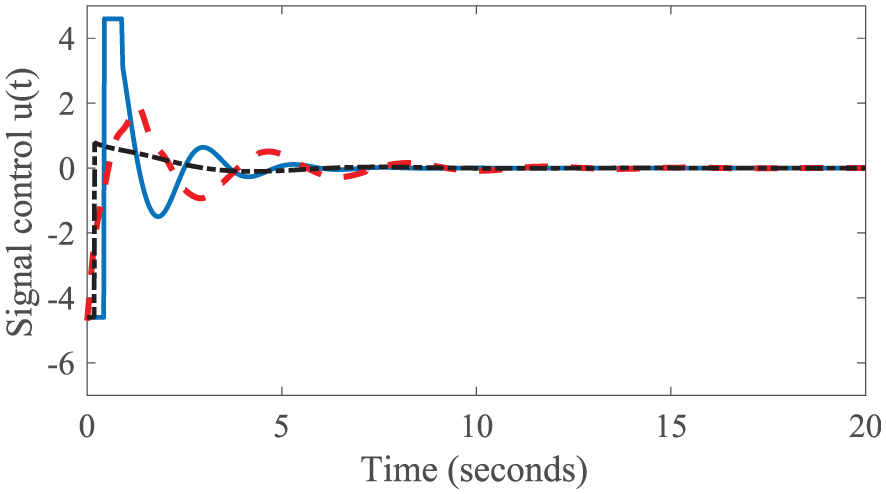
Evolution of the control signal of the ball-and-beam system for Scenario A. (Proposed approach: ‘—’, approach by Liu et al. (2016a): ‘- - -’ and approach by Vafamand et al. (2016): ‘- · -’).
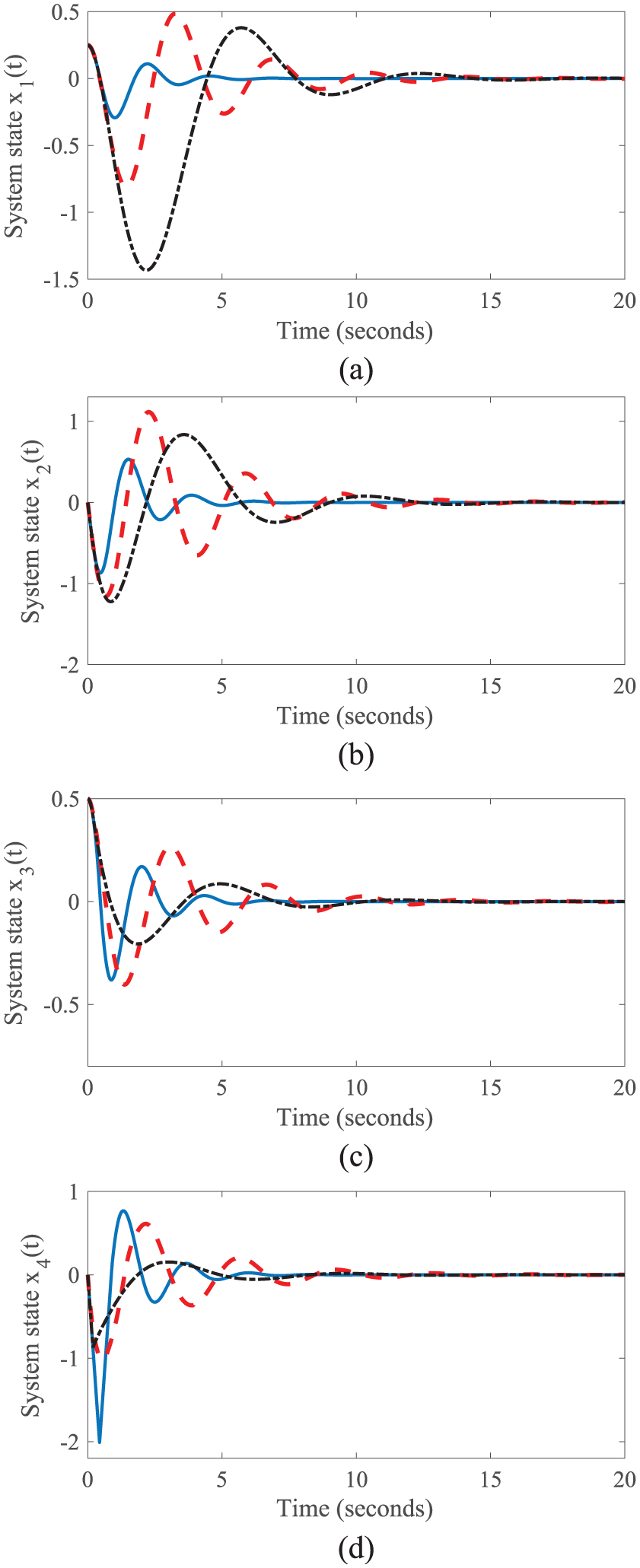
Evolutions of the state variables of the ball-and-beam system for Scenario A: (a) the
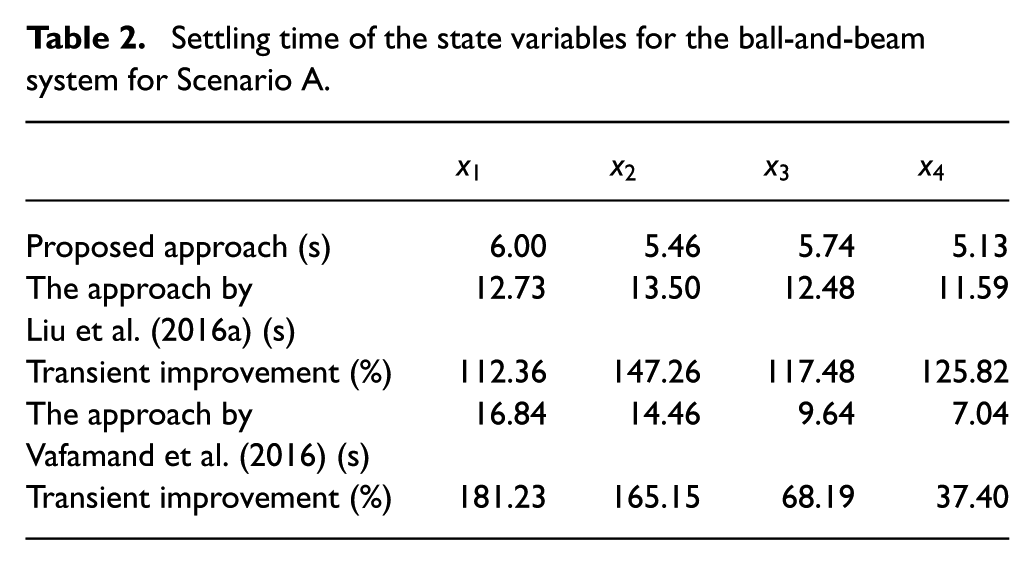
Settling time of the state variables for the ball-and-beam system for Scenario A.
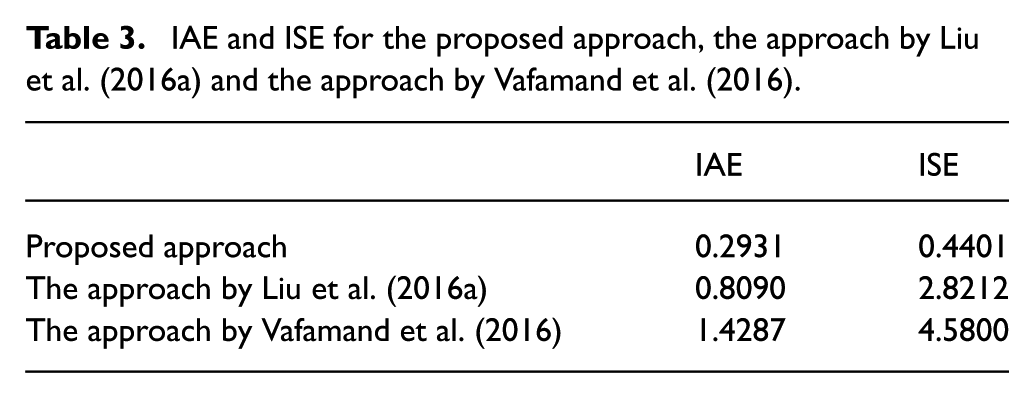
IAE and ISE for the proposed approach, the approach by Liu et al. (2016a) and the approach by Vafamand et al. (2016).
Scenario B
In this scenario, the effect of the uncertainty on the resilient controller is investigated. Assume that, the non-fragile controller is affected by the uncertainty

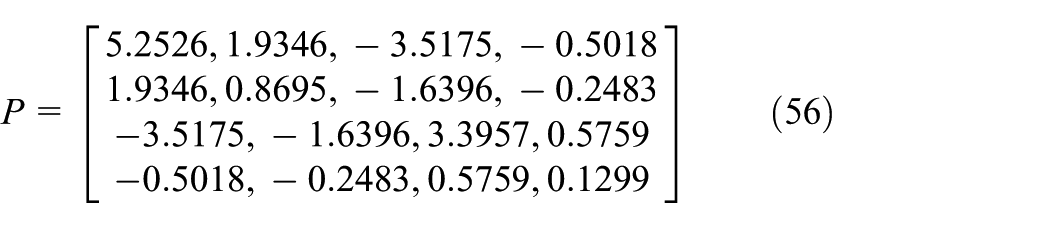
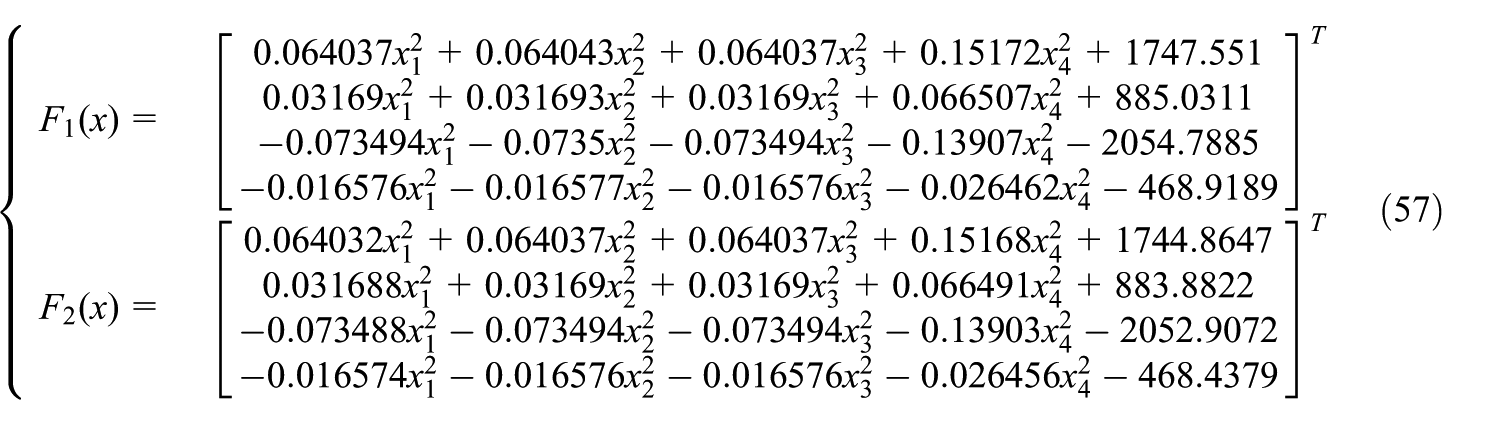
By selecting the same parameters as those given in Scenario A, together with the controller uncertainties given by equation (55) in Theorem 1, the controller gain matrices are achieved in equations (56) and (57)
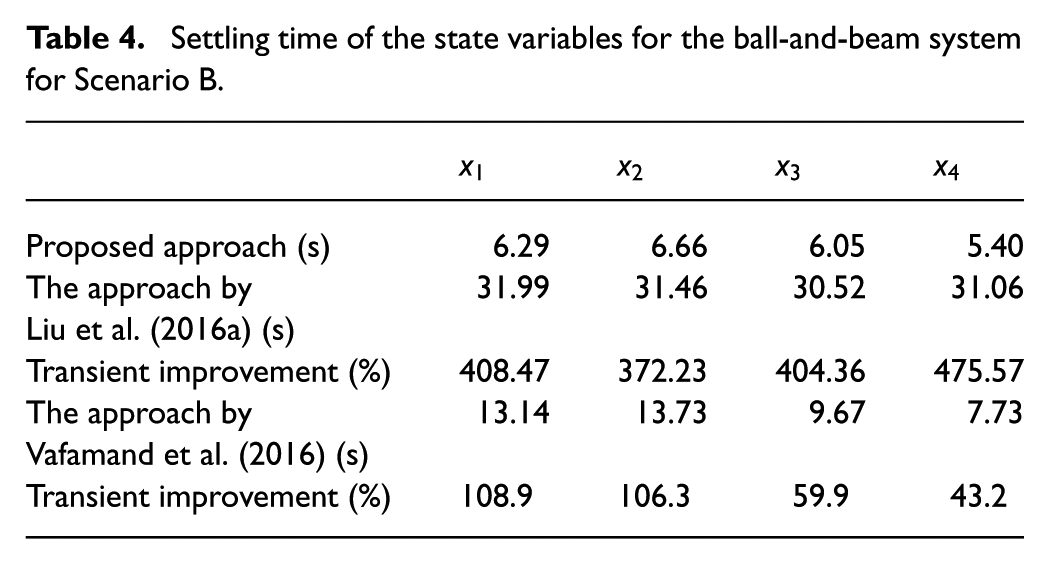
Figures 5 and 6 show the evolution of the control signal and state variables, respectively. It is obvious that the proposed technique is robust against the parameter uncertainties of the control gain matrices. Furthermore, Figures 5 and 6 illustrate the superiority of the proposed non-fragile controller compared to the work by Liu et al. (2016a) (dashed line) and Vafamand et al. (2016) (dot-dash line). Moreover, to clear the differences between the proposed approach and the state-of-the-art methods given by Liu et al. (2016a) and Vafamand et al. (2016), Table 4 is presented.
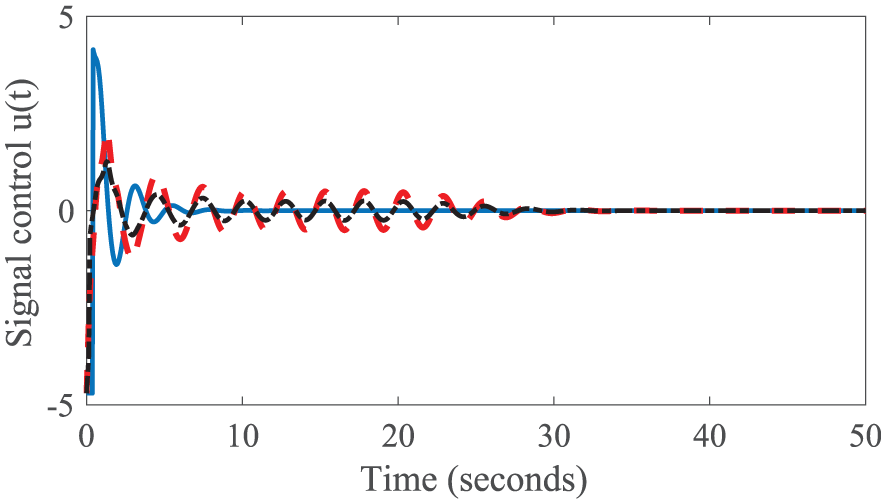
Evolution of the control signal of the ball-and-beam system for Scenario B. (Proposed approach: “—”, Liu et al. (2016a): “- - -”, and Vafamand et al. (2016): “- · -”.)
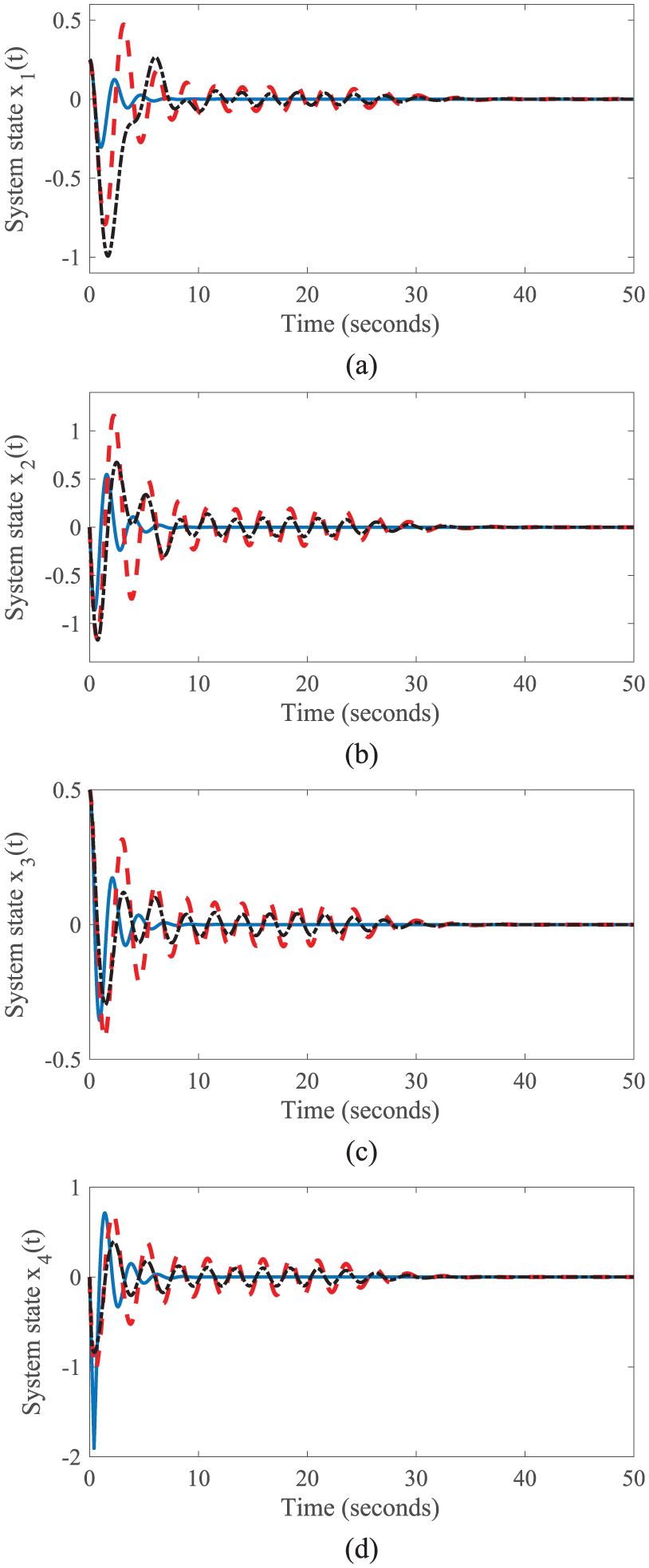
Evolutions of the state variables of the ball-and-beam system for Scenario B: (a). The
Settling time of the state variables for the ball-and-beam system for Scenario B.
Scenario C
The aim of Scenario C is to analyse the effect of the system uncertainty on the proposed resilient controller. To achieve this goal, the uncertainty is considered to be

In addition, the output uncertainties are considered to be zero. Let
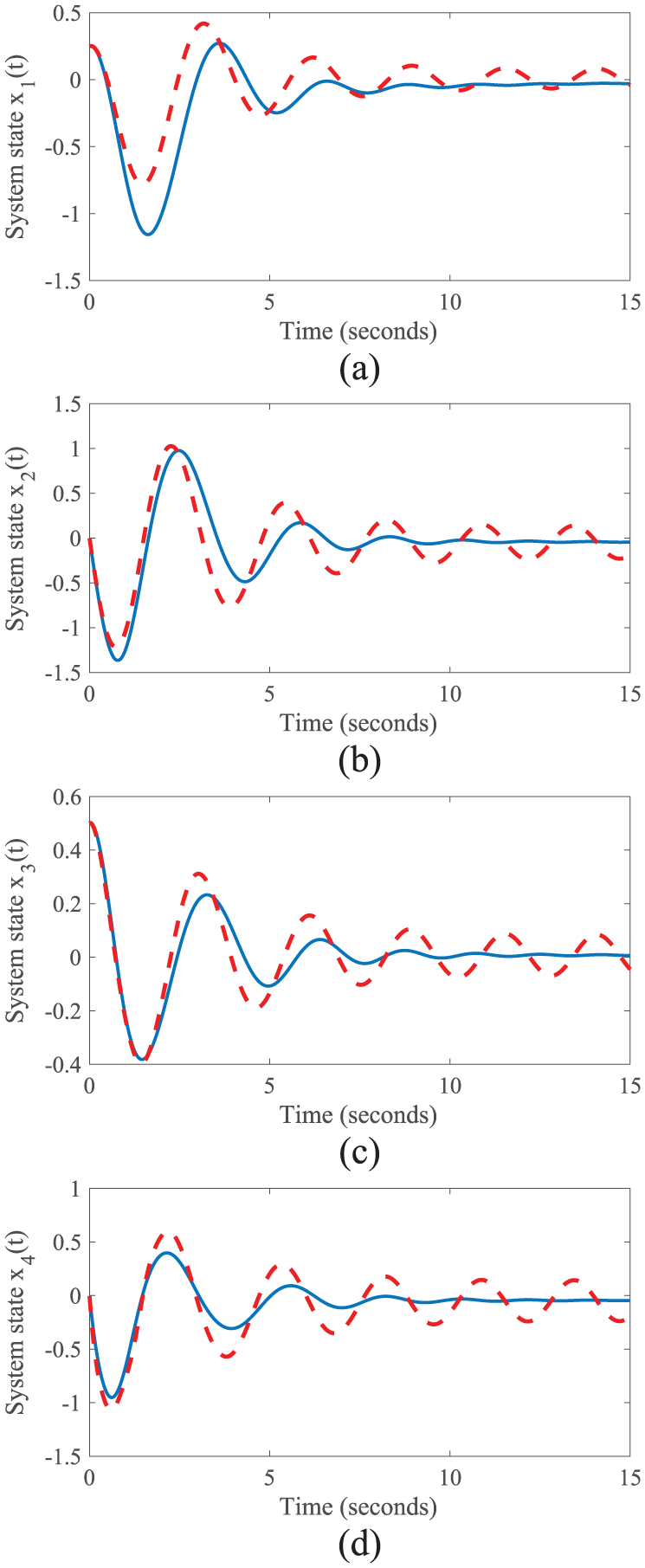
The simulations are done based on the calculated gain matrices given by equation (60), the controller uncertainty given by equation (55) and the system uncertainty given by equation (58). Figures 7 and 8 illustrate the control signal and the state variables of the non-linear ball-and-beam system, respectively. The proposed approach and the approach by Liu et al. (2016a) are illustrated by the solid blue and dashed red colors, respectively. Note that the approach by Vafamand et al. (2016) cannot stabilize the non-linear system with the given uncertainties and actuator saturation limit.
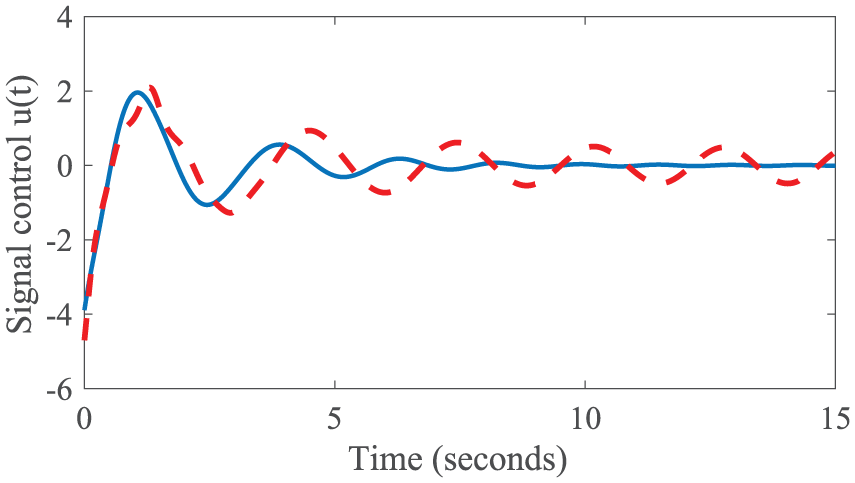
Evolution of the control signal of the ball-and-beam system for Scenario C. (Proposed approach: ‘—’ and the approach by Liu et al. (2016a): ‘- - -’.)
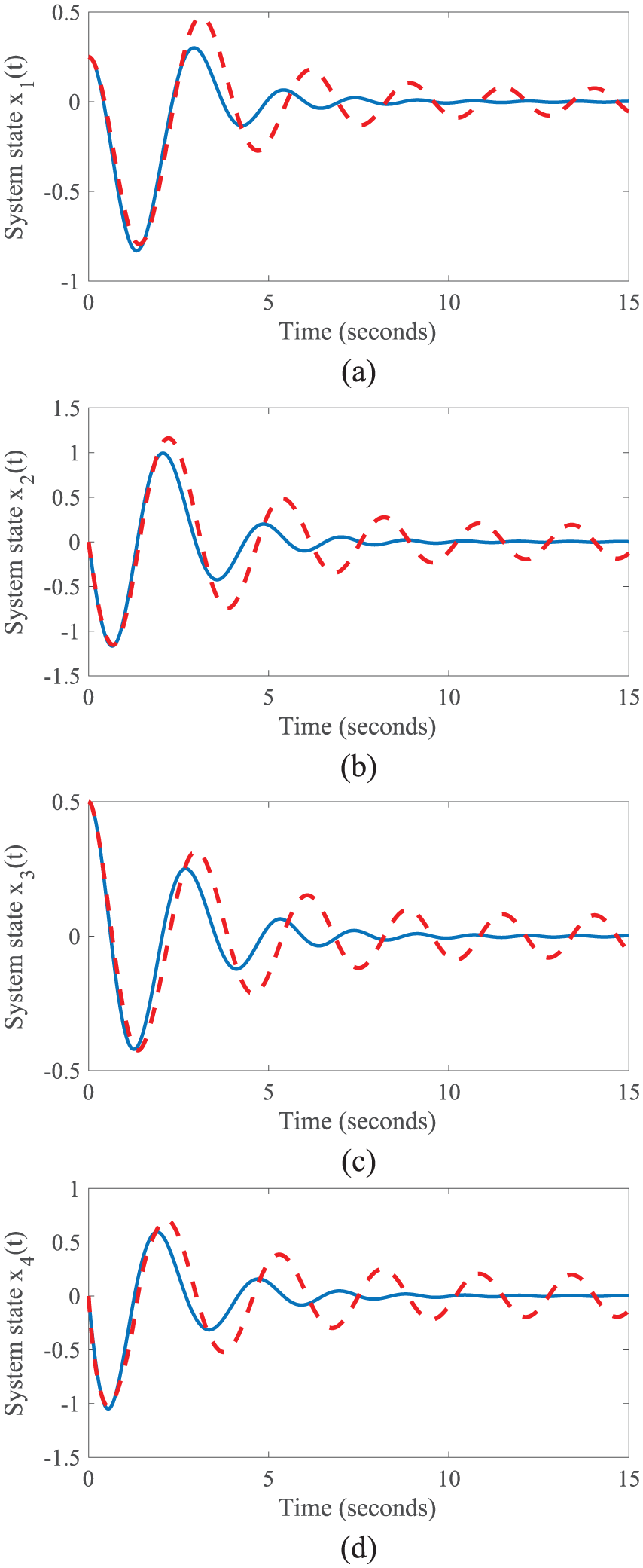
Evolutions of the state variables of the ball-and-beam system for Scenario C: (a) the

Evolution of the control signal of the ball-and-beam system for Scenario D. (Proposed approach: ‘—’ and the approach by Liu et al. (2016a): ‘- - -’.)
Evolutions of the state variables of the ball-and-beam system for Scenario D: (a) the
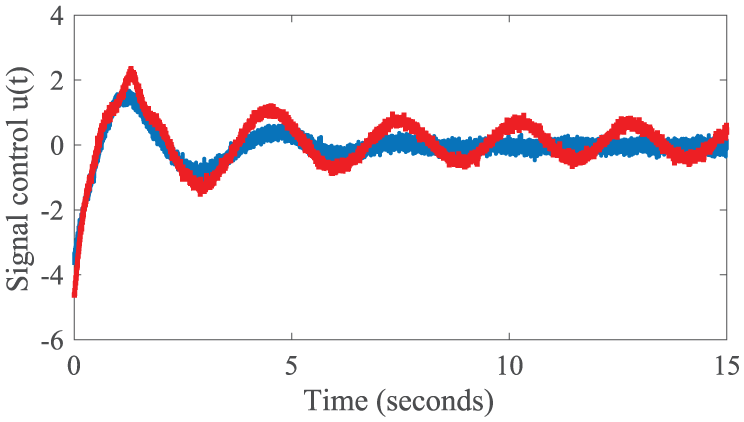
Evolution of the control signal of the ball-and-beam system for Scenario D (special case) with white noise into the system. (Proposed approach: ‘—’ and the approach by Liu et al. (2016a): ‘- - -’.)
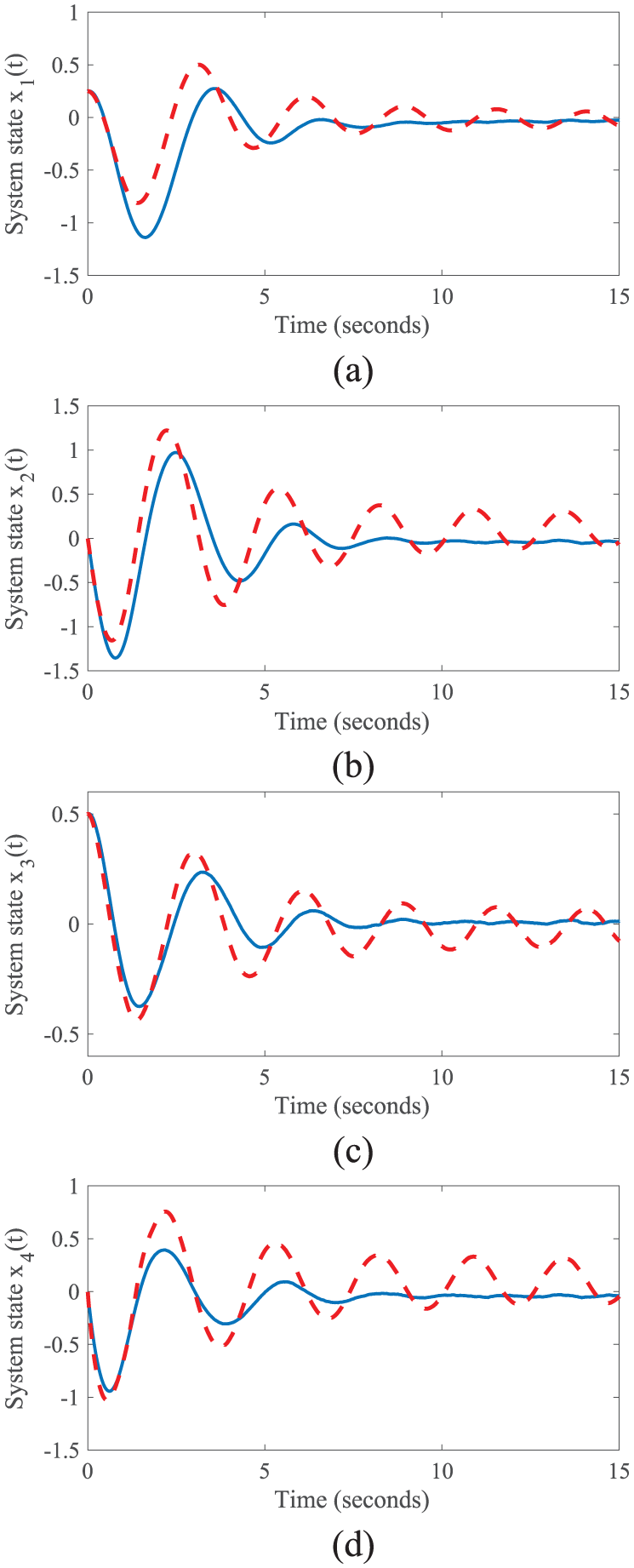
Evolutions of the state variables of the ball-and-beam system for Scenario D (special case) with white noise into the system. (Proposed approach: ‘—’ and the approach by Liu et al. (2016a): ‘- - -’.)
Scenario D
In this scenario, all of the destructive effects of all uncertainties and input saturation constraints such as: control saturation, non-fragile controller, system uncertainty and persistent bounded disturbances have been considered in the numerical simulation. In respect to the persistent bounded disturbance, the system matrices
The designed matrices given by equation (62) are used to construct a saturated non-fragile controller for an uncertain polynomial fuzzy model subject to the persistent bounded disturbance. The evolution of the controller input signal and state variables are shown in Figures 9 and 10, respectively. The accuracy and performance of the controller in the presence of uncertainty, disturbance and input saturation are observed in Figures 9 and 10. In comparison with the work by Liu et al. (2016a), the proposed approach has less settling time. Based on the proposed approach, the norm-
Conclusions
In this paper, we have studied the problem of designing a saturated non-fragile polynomial fuzzy controller which is robust against the uncertainty of the persistent bounded disturbance non-linear system. The non-fragile controller was described by fractional uncertainties. The proposed controller guaranteed the
Footnotes
Appendix
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.