This paper investigates the leaderless and leader-following consensus problem for a class of second-order multi-agent systems subject to input saturation, that is, the control input is required to be a priori bounded. Moreover, the control coefficients are assumed to be unavailable, which cannot be lower or upper bounded by any known constants. Distributed consensus protocols are proposed based only on agents’ own velocity state information and relative position state information among neighbouring agents and the leader. By virtue of the adaptive control technique, algebraic graph theory and Barbalat’s lemma, it is proved that the states of the multi-agent systems can achieve consensus under the assumption that the interconnection topology is undirected and connected. Finally, two simulation examples are provided to illustrate the effectiveness of the theoretical results.
Many interesting problems arise from distributed control of multi-agent systems (MASs), such as flocking control, rendezvous control, formation control, containment control, coverage control, and others; these can all be regarded as extended issues of consensus control. The objective of the consensus problem is to design a distributed control protocol such that the states of a team of agents can reach an agreement by just using local information from the agents’ neighbours. Recent years have witnessed an increasing attention towards the consensus problems of MASs due to its wide applications in formation control of unmanned aerial vehicles (UAVs) or multiple mobile robots, distributed sensor networks and attitude alignment of satellite clusters (Cao et al., 2013; Chen et al., 2014b; Fan et al., 2014; Knorn et al., 2016; Zhang et al., 2016).
In practical engineering systems, actuation devices are always subject to amplitude saturation (limited in voltage, current, force, torque, and so forth (Cheng et al., 2015; Sun et al., 2016; Wu et al., 2016; Yin et al., 2016)), hence the input saturation problem is ubiquitous in control system design. Recently, many efforts have been made in the consensus problem with input saturation. Abdessameud and Tayebi (2010) investigated a class of MASs without velocity measurements and with input constraints. Su et al. (2013, 2014), Fan et al. (2015), Zhang et al. (2016) and Chu and Zhang (2016) utilized a low-gain feedback technique to semiglobally stabilize the linear saturated MASs, that is, the consensus results rely on the initial states of the MASs. In Meng et al. (2013), it was proved that the neutrally stable MASs and double-integrator MASs can be globally stabilized over a fixed interconnection topology. Lyu et al. (2016) considered the finite-time consensus problem for double-integrator MASs with input saturation.
In the aforementioned literature, most of the results are based on the fact that the control coefficients of the MASs are known a priori. However, the control coefficients may be inaccessible for controller design (Nussbaum, 1983). Some existing works have been concerned with the consensus problem for MASs with unknown control coefficients by using the well-known Nussbaum gain technique (Chen et al., 2014a; Fan and Wu, 2018; Guo et al., 2017; Liu, 2015; Ma, 2017; Peng and Ye, 2014; Su, 2015) and adaptive control approaches (Niu et al., 2017; Radenkovic and Tadi, 2016; Rezaee and Abdollahi, 2017). Nonetheless, input saturation is not considered in these works. Because of the input constraint, the Nussbaum gain technique is no longer applicable.
Motivated by the above observation, this paper intends to solve the consensus problems for a class of second-order MASs with unknown control coefficients and input saturation. To the best of our knowledge, no results in the literature have been reported on this. Throughout this paper, the control protocols are required to be a priori bounded and the unknown control coefficients cannot be lower or upper bounded by any known constants. The contributions of this paper are twofold. (1) Compared with the existing results on the consensus problem of MASs with unknown control coefficients (Chen et al., 2014a; Guo et al., 2017; Liu, 2015; Ma, 2017; Niu et al., 2017; Peng and Ye, 2014; Radenkovic and Tadi, 2016; Rezaee and Abdollahi, 2017; Su, 2015), in the current paper we have taken the input saturation into account for consensus of uncertain MASs, which is a more practical scenario. (2) In contrast to most recent work on the problem of second-order leader-following consensus of MASs subject to input saturation (Fan et al., 2015; Meng et al., 2013; Su et al., 2013), where both the position and velocity information of the leader were assumed to be accessible for a limited number of agents, in this paper we suppose that the velocity state of the leader is unavailable for controller design. Indeed, agents can only obtain their own velocity information and the position information from their neighbours and the leader. This condition is more general than the one in Niu’s work (Niu et al., 2017), where the velocity of the leader was assumed to be known for all agents. With the aid of the adaptive control technique, it is rigorously proved that consensus can be achieved under the assumption that the interconnection topology is undirected and connected.
The rest of this paper is organized as follows. In the next section, some preliminaries of algebraic graph theory are presented, and the consensus problem is stated. Following that, the leaderless and leader-following consensus algorithms are given. Then, two numerical simulations are carried out to illustrate the effectiveness of our results. Concluding remarks are given in the final section.
Preliminaries and problem description
Denote as a weighted interconnection graph consisting of a node set , an edge set , and a weighted adjacency matrix with weights if , else . Moreover, we assume that for all . The graph is undirected if and only if , for all . The corresponding Laplacian matrix of graph is defined by and for . If there is a path between any two distinct nodes of the weighted undirected graph , then is called connected. If the interconnection graph is undirected and connected, then the matrix L is positive semi-definite.
The following lemmas will be useful in the remainder of this paper.
Lemma 1.(Barbalat’s Lemma (Khalil, 2002)) Let be a uniformly continuous function on . Suppose that exists and is finite, then .
where , and are positive scalars, is a continuously differentiable function satisfying , for , and , . If is bounded for all time and , then , are both bounded and .
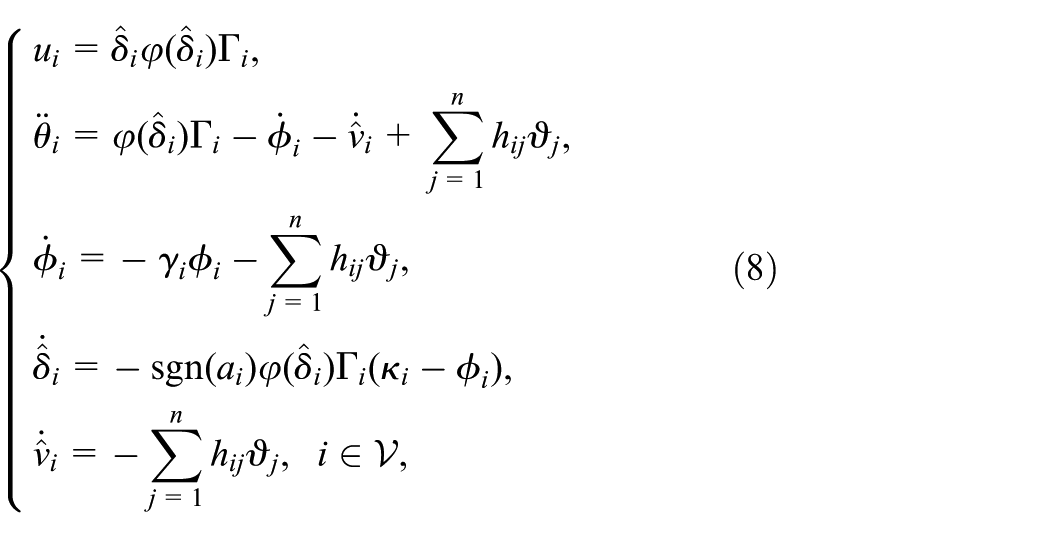
We consider the following second-order MASs with n agents:
where , , are the position, velocity and control protocol of the ith agent, respectively. , , are the unknown control coefficients. For the sake of simplicity in presentation, we consider the one-dimensional control system – in fact, the results can be easily extended to the m-dimensional () case by using the Kronecker product.
The trajectory of the leader is governed by
where , are the position and velocity of the leader, respectively. It is easy to see that the leader has a time-invariant velocity.
Definition 3.We say that the saturated control protocol solves theleaderless consensus problemif for any initial conditions , , , the states of the agents satisfy , , for all .
Definition 4.We say that the saturated control protocol solves theleader-following consensus problemif for any initial conditions , , , the states of the agents satisfy , , for all .
Assumption 5.The interconnection graph is undirected and connected.
Assumption 6.The unknown control coefficients , , of the MASs (equation (1)) are nonzero and of known signs.
Remark 7.We assume that only the different signs of agents’ control coefficients are known for controller design while the bounds of control coefficients are not necessarily known a priori. This is different from the assumptions proposed by Peng and Ye (2014), Chen et al. (2014a) and Ma (2017), where the unknown control coefficients have the same sign. Although Assumption 6 is a bit conservative, it is reasonable and effective to solve the uncertain MASs subject to input saturation.
Main results
In this section, we propose consensus control protocols for both leaderless and leader-following cases. Hence our main results are divided into two parts.
Leaderless consensus
First, the defined leaderless consensus problem will be investigated in this subsection.
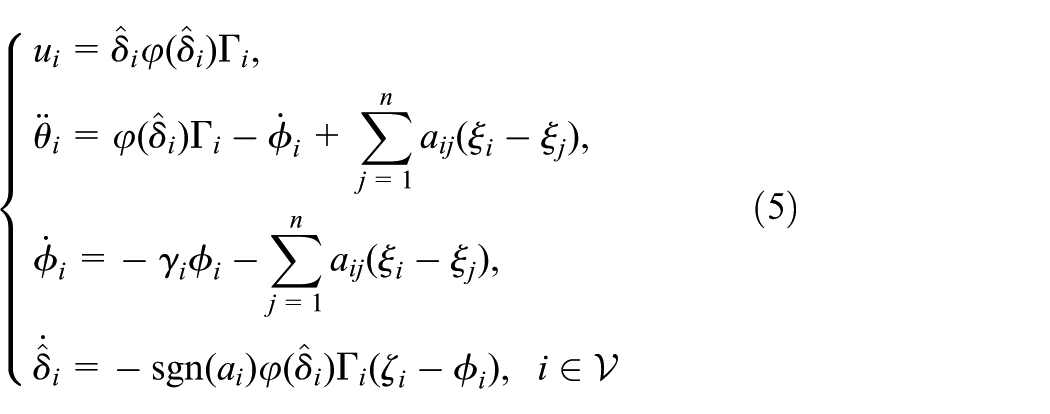
We introduce the following new variables for each agent:
The variable will be used to design an a priori bounded control protocol for each agent. Note that the upper bound of is independent of the number of the agents in the MASs (equation (1)). Denote
where , and are positive control gains, and is a continuous function defined in Lemma 2.
Let be a continuous function satisfying and , for .
where is the parameter estimate of , and , , , , , can be selected arbitrarily, and , , are positive constants.
Remark 8.It can be seen that we have proposed an adaptive distributed consensus protocol without using any neighbours’ velocity information. In real engineering systems, velocity measurements between agents are generally more difficult to obtain than position measurements. Hence, this controller is more practical and cost-effective.
Remark 9.In protocol (5), the function , which is similar to that in Abdessameud and Tayebi (2010), was designed to deal with input saturation. Then, the positive gains and can be selected small enough such that the absolute value of the protocol will not exceed the given control upper bound . The dynamics of the variables and were proposed to address the consensus problem without velocity measurements and with input constraints. Note that the variable was used for designing an a priori bounded protocol whose upper bound is independent of the number of agents in the MASs. The variable , motivated by Niu et al. (2017), was designed to estimate the unknown control coefficients . The continuous function was introduced such that . It is worth mentioning that the protocol proposed in this paper is continuous, which can avoid chattering phenomenon in practical applications.
Now, we state the following theorem for the leaderless MASs.
Theorem 10.Consider the second-order MASs (equation (1)) with control protocol (5). Let , and the control gains in equation (4) satisfy
for any control upper bound . Then, under Assumptions 5 and 6, the following properties hold:
, for all,
the leaderless consensus problem is solved.
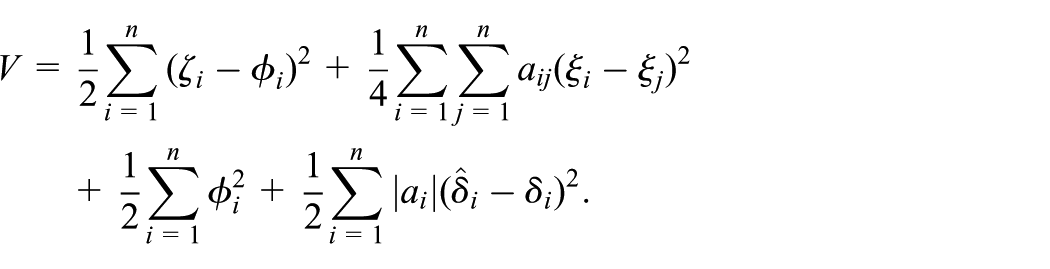
Proof. The result (1) is obvious from control law (5) and the properties of the functions and . To prove result (2), first we consider the following Lyapunov function candidate for the overall MASs:
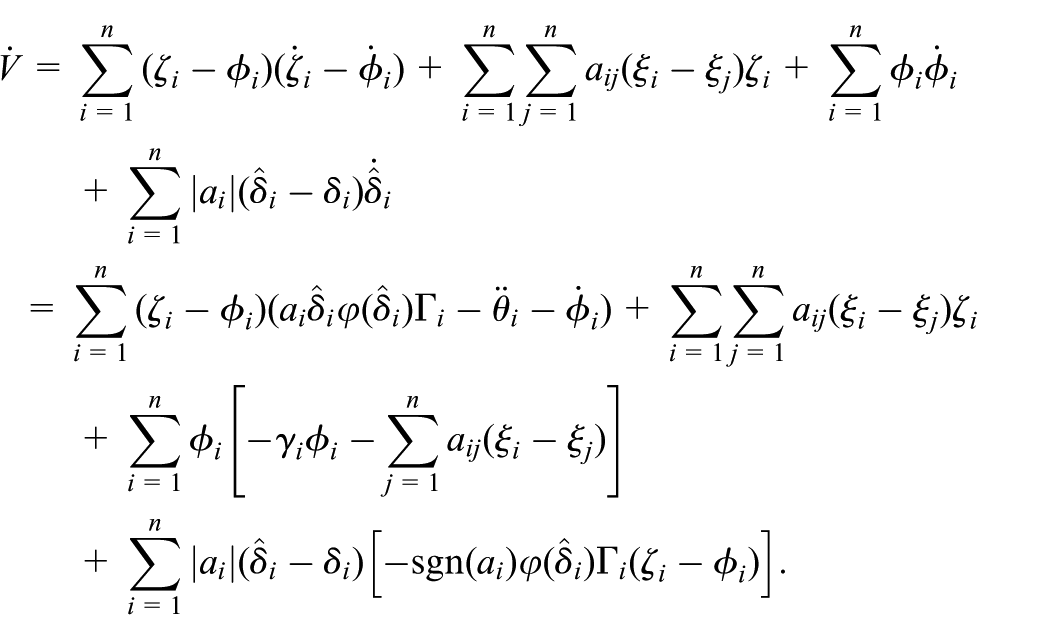
The time derivative of V along the trajectories of equation (1) can be obtained as
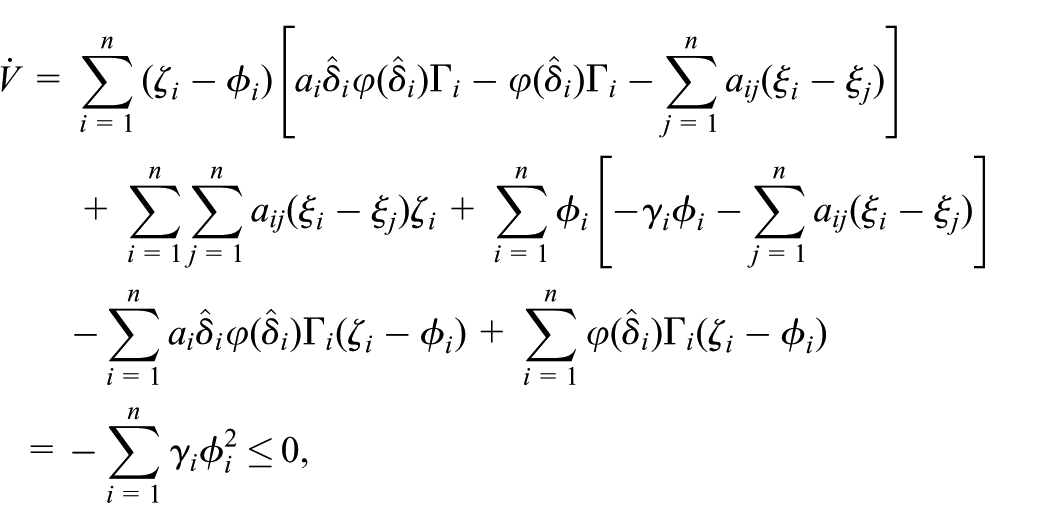
Note that , , we have
Since and , that is, is non-increasing and bounded below by zero, we can easily see that exists. This implies that is bounded. Since and , we can conclude that and , for , are both bounded. If , that is there is an edge between nodes k and s, then is bounded since . Since the interconnection graph is connected, that is, there is a path between any two distinct nodes in , we know that is bounded, for . Using the above boundedness results, we can see from equation (5) that is bounded, for . We have is bounded, therefore, is a uniformly continuous function on . Since exists and is finite, we know by Barbalat’s Lemma (Lemma 1) that , that is, , for . Based on this fact, since is bounded, by using Barbalat’s Lemma again, we have , for . Therefore, we conclude from equation (5) that , . Since the interconnection graph is connected, we can conclude that
Then from the result of Lemma 2, we can conclude that and are both bounded and
According to equations (3) and (5), one has and . Therefore, is bounded, for . Then we know that exists and is finite, and is a uniformly continuous function on , hence we can conclude by Barbalat’s Lemma that
Thus the leaderless consensus problem is solved.▪
Leader-following consensus
In this subsection, we consider the leader-following consensus problem for the MASs (equation (1)) based on the assumption that the velocity of the leader is unknown for all the follower agents.
Denote the constant gains (which is known as the pinning gains) with if agent can get access to the states of the leader, otherwise . Denote . It is assumed that at least one agent is connected to the leader, then the matrix is positive definite (Hong et al., 2006).
Let us introduce the following new variables for each agent
where is a parameter estimate of , that is, the unknown velocity state of the leader. Obviously, one has with , . Therefore, one can verify that
where , , , , , , can be selected arbitrarily, and are positive constants, .
Remark 11.In view of equations (7) and (8), it is easy to see that only a limited number of agents can get access to the position information of the leader, . The velocity information of the leader is assumed to be unknown for all the other agents, which is different from most existing works (Fan et al., 2015; Meng et al., 2013; Su et al., 2013), where the velocity of the leader was assumed to be known for some follower agents. Motivated by Hong’s work (Hong et al., 2008), we introduce a parameter estimate to compensate the unknown state .
Now, we state the following theorem for the leader-following MASs.
Theorem 12.Consider the second-order MASs (equation (1)) and the dynamics of the leader in equation (2) with the control protocol (equation (8)). Let , and the control gains in equation (4) satisfy
for any control upper bound . Then, under Assumptions 5 and 6, the following properties hold:
for all,
the leader-following consensus problem is solved.
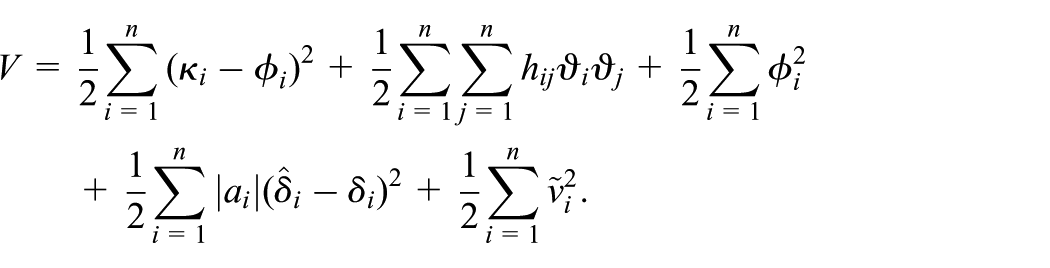
Proof. The result (1) is obvious from control law (8) and the properties of the functions and . Since matrix H is positive definite, one has , where . To prove result (2), we construct the following Lyapunov function candidate for the overall MASs:
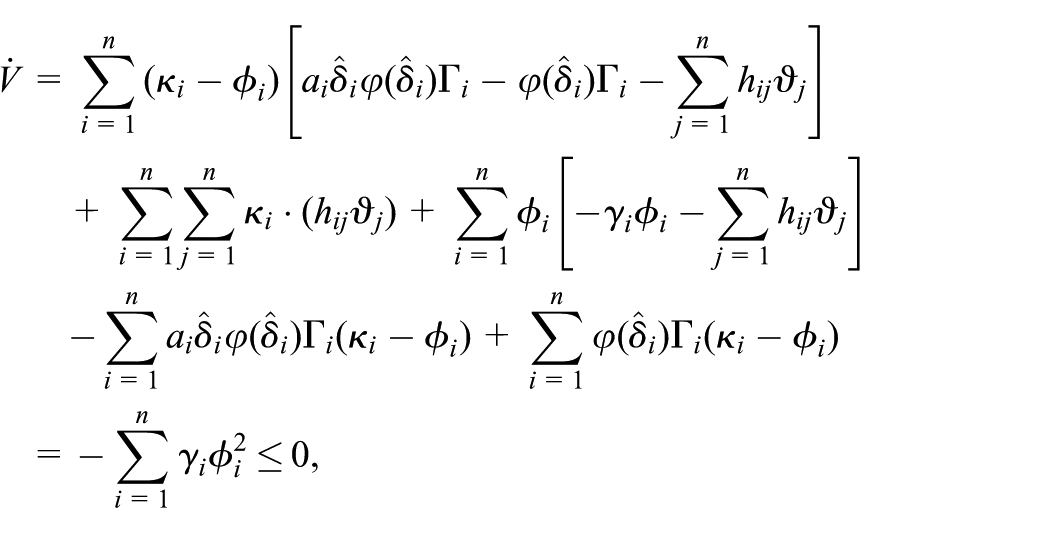
Note that and , the time derivative of V along the trajectories of equation (1) is
Using the fact , , we have
which is negative semi-definite. Similar to the analysis of Theorem 10, we can conclude that and , for . Therefore, we conclude from equation (8) that , . Since the interconnection graph is connected, we can conclude that
Then, from the result of Lemma 2, we can conclude that and are both bounded and
According to equations (6) and (8), one has and . Since , we know that exists and is finite. Besides, is bounded, for . Therefore is a uniformly continuous function on , then we can conclude by Barbalat’s Lemma that
Thus the leader-following consensus problem is solved.▪
Remark 13.While the asymptotical stability of , , , were shown in Theorems 10 and 12, there is no guarantee that the parameter estimates and asymptotically converge to their true values. Only the boundedness of estimation errors and can be assured.
Remark 14.The condition was introduced to ensure that , which further implies that . Actually, there are many functions that can fulfil this condition. Note that without this condition (or the function ), it is difficult to guarantee that the control protocol is bounded by a known constant. Discontinuous signum function-based protocols can deal with the input saturation problem as well (Cortés, 2006; Wang et al., 2014), while it might cause undesirable chattering phenomenon and may not be feasible for practical implementation. However, in this paper, is continuous and specifically the condition holds for arbitrary .
Numerical simulations
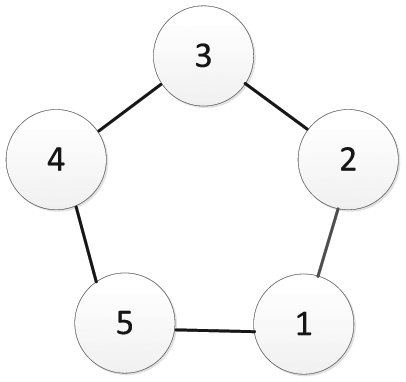
In this section, two simulation examples are given to verify the effectiveness of the theoretical results in this paper. Consider the MASs (equation (1)) of five agents with interconnection topology as shown in Figure 1.
The interconnection topology of the MASs (equation (1)).
Let the upper bound of the control protocol be such that we can select control gains as and . The functions and , both fulfilling the given conditions. Let , , and the control coefficients be , which are unknown except for their signs. The initial conditions of the five agents are chosen as
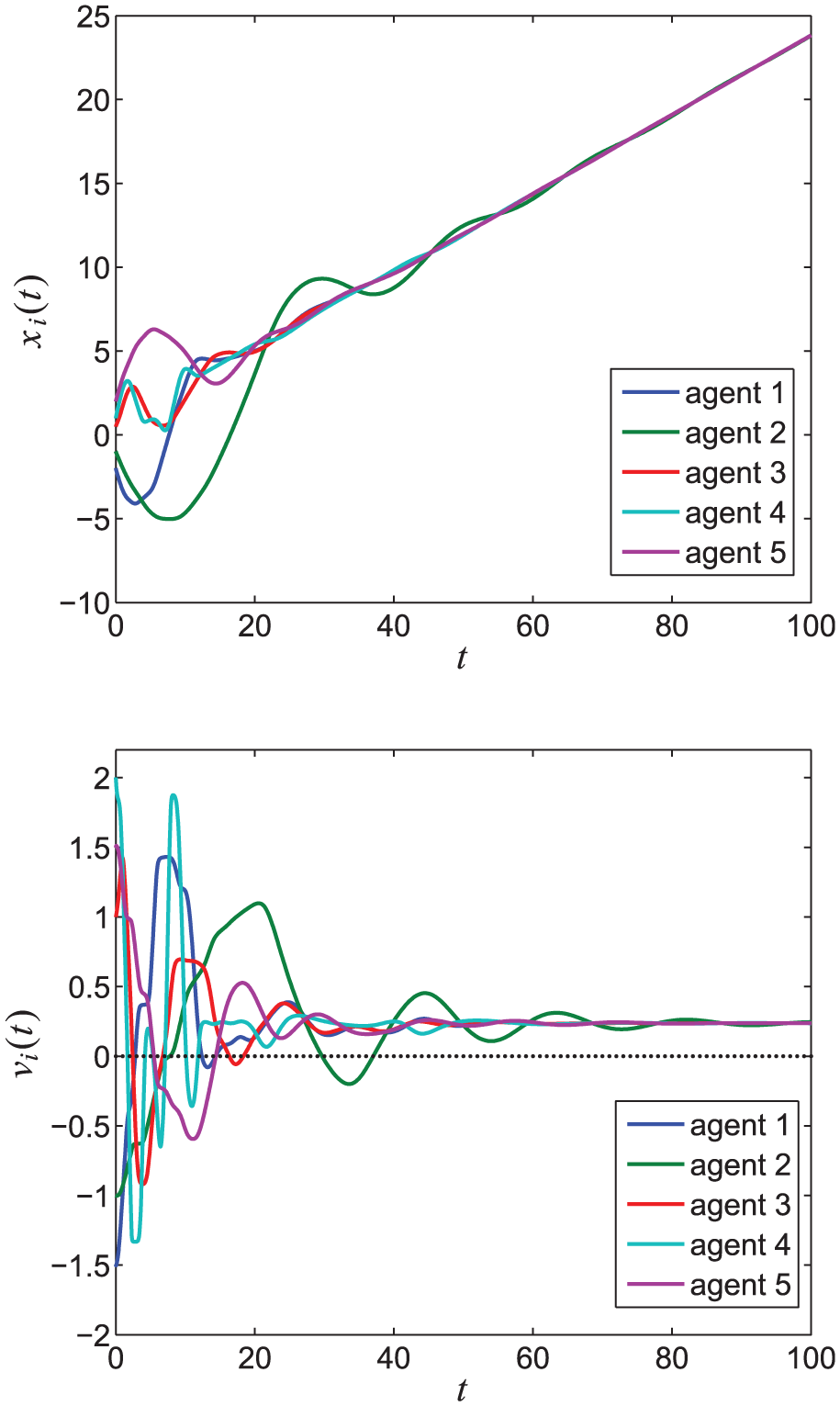
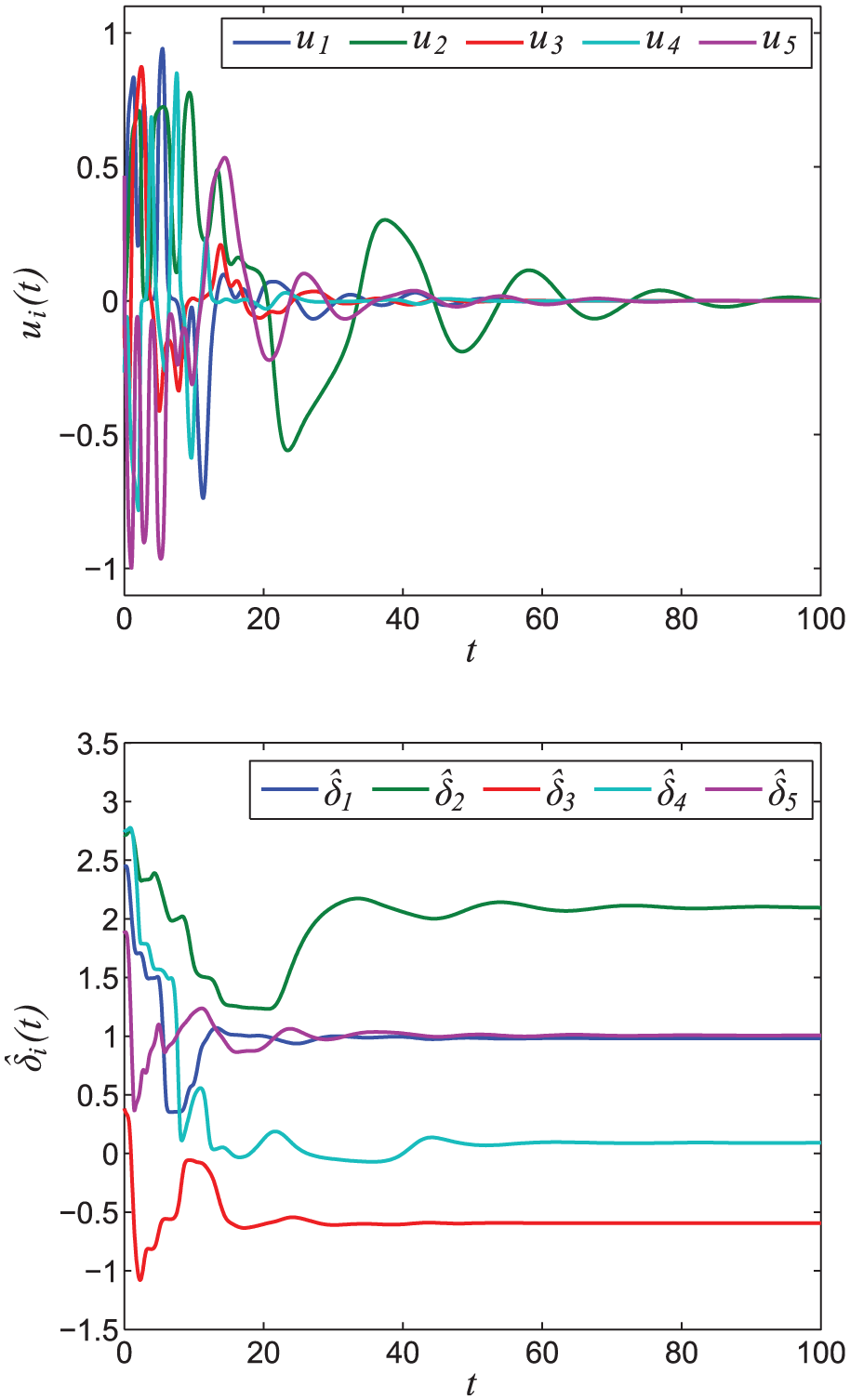
First, we consider the leaderless framework. Consider control protocol (5). It can be seen from Figure 2 that leaderless consensus is achieved. Figure 3 shows that the absolute values of the control protocol are all smaller than . The estimate are all bounded, . We see that leaderless consensus is achieved even though input saturation occurs.
Evolution of the agents’ states under control protocol (5) with . The black dashed line indicates 0. The velocities of the five agents finally converge to 0.23.
Evolution of the agents’ control protocol and the boundedness of the parameter estimates under control protocol (5) with .
Next we consider the leader-following framework. The initial conditions of the leader are chosen as
Thus the position trajectory of the leader is , for .
Without loss of generality, we assume that only agent 1 can get access to the position state of the leader, that is , , for . All the control parameters and initial conditions are the same as in the previous example.
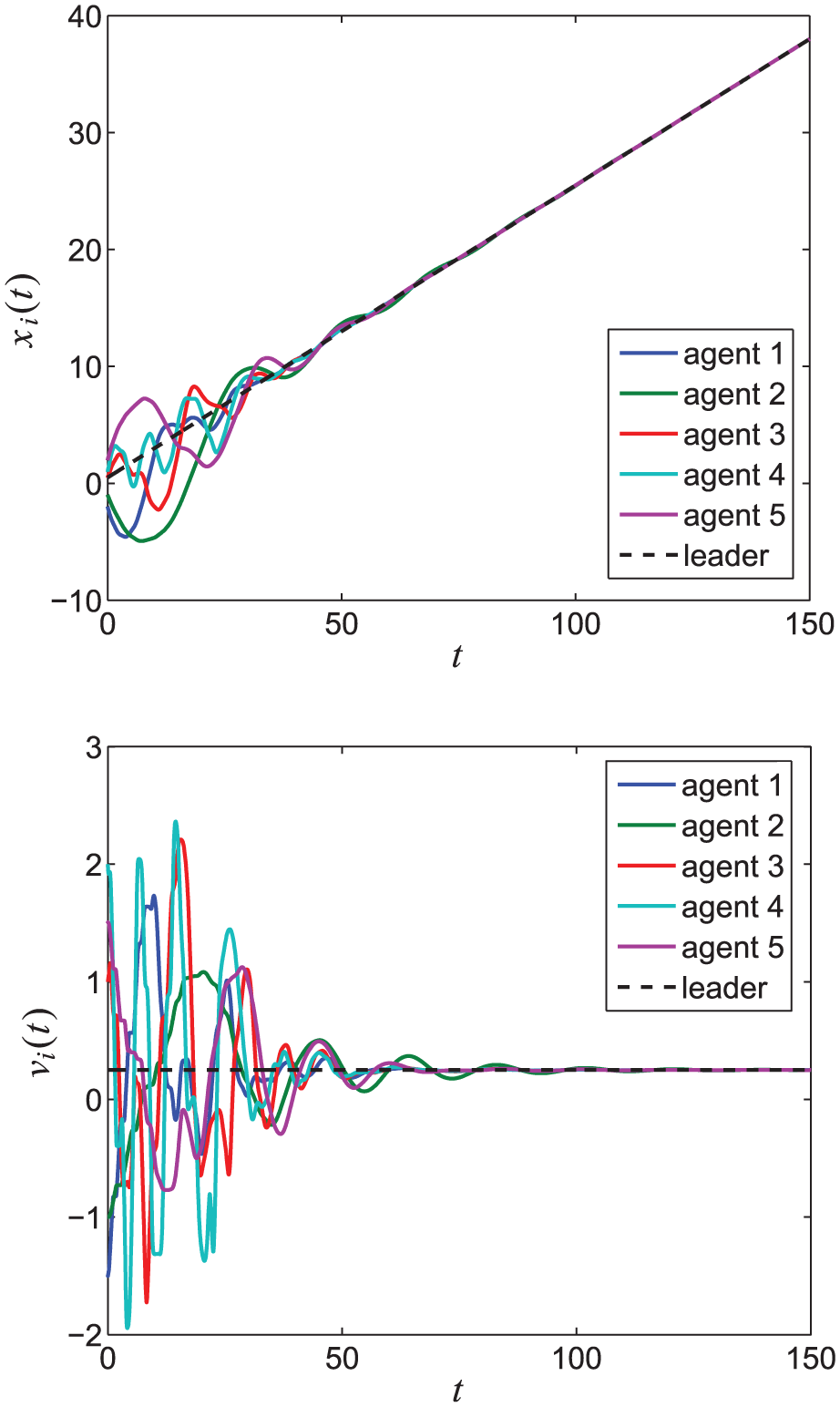
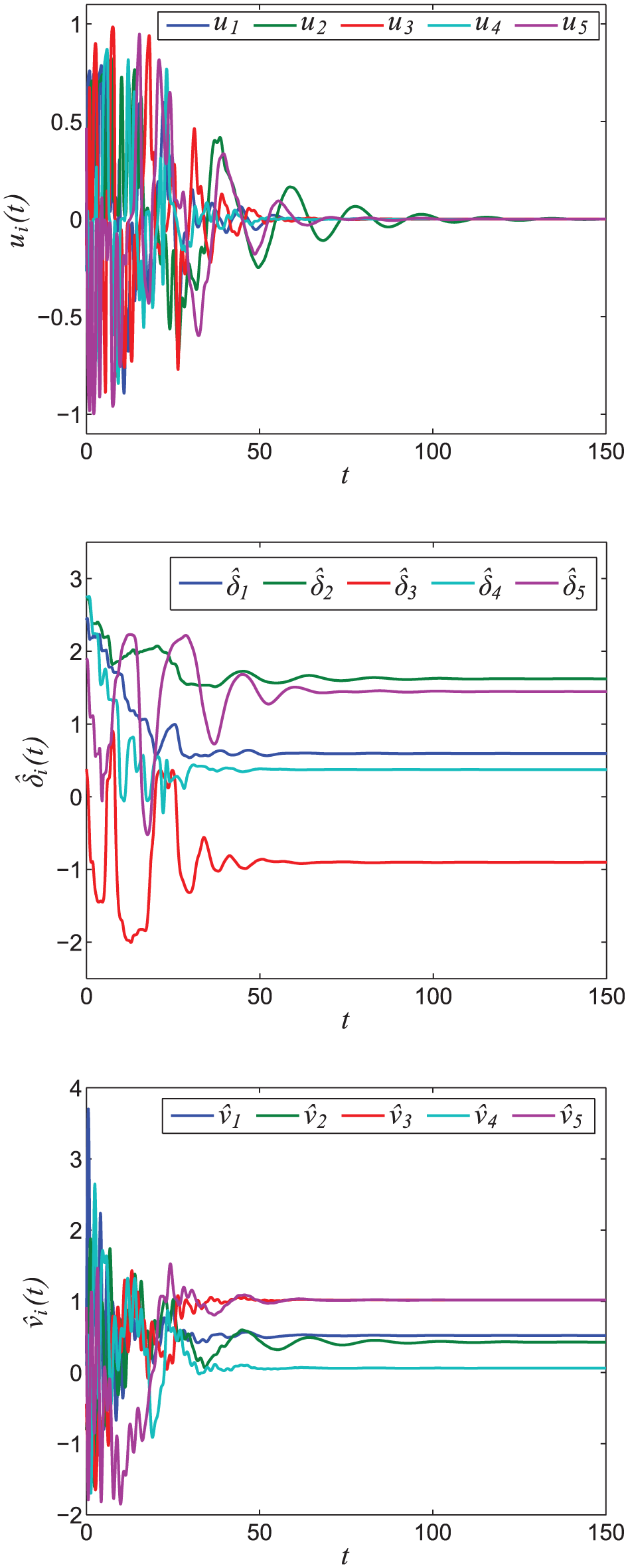
Figure 4 shows the positions and velocities of agents 1–5 and the leader under control protocol (8). It can be seen that all the followers can track the leader, and from Figure 5 we see that the absolute values of the control protocol are all smaller than . The estimates and are all bounded, . We see that leader-following consensus is achieved even though input saturation occurs.
Evolution of the states of the five agents and the leader under control protocol (8) with .
Evolution of the agents’ control protocol , and the boundedness of the parameter estimates and under control protocol (8) with .
Conclusion
In this paper, the leaderless and leader-following consensus problems for second-order MASs with unknown control coefficients and input saturation have been investigated. Two saturated control protocols are proposed. Under the assumption that the interconnection topology is undirected and connected, it is theoretically proved that the states of all of the agents in the MASs asymptotically converge to the same value. Future work will be to further study the saturated consensus problems under more general interconnection topologies.
Footnotes
Conflict of interest
The authors declare that there is no conflict of interest.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant nos. 61703175, 11626111 and 11601180), the Research Fund for the Doctoral Program of Huizhou University (Grant no. 2015JB020), the Science and Technology Program of Huizhou City (Grant no. 2016X0429044), and the Natural Science Foundation of Huizhou University (Grant no. hzuxl201618).
References
1.
AbdessameudATayebiA (2010) On consensus algorithms for double-integrator dynamics without velocity measurements and with input constraints. Systems & Control Letters59(12): 812–821.
2.
CaoYYuWRenWet al. (2013) An overview of recent progress in the study of distributed multi-agent coordination. IEEE Transactions on Industrial Informatics9(1):427–438.
3.
ChenWLiXRenWet al. (2014a) Adaptive consensus of multi-agent systems with unknown identical control directions based on a novel Nussbaum-type function. IEEE Transactions on Automatic Control59(7): 1887–1892.
4.
ChenZZhangHFanMet al. (2014b) Algorithms and experiments on flocking of multiagents in a bounded space. IEEE Transactions on Control Systems Technology22(4): 1544–1549.
5.
ChengZZhangHFanMet al. (2015) Distributed consensus of multi-agent systems with input constraints: a model predictive control approach. IEEE Transactions on Circuits and Systems – I: Regular Papers62(3): 825–834.
6.
ChuHZhangW (2016). Adaptive consensus tracking for linear multi-agent systems with input saturation. Transactions of the Institute of Measurement and Control38(12): 1434–1441.
7.
CortésJ (2006) Finite-time convergent gradient flows with applications to network consensus. Automatica42(11): 1993–2000.
8.
FanMWuY (2018) Global leader-following consensus of nonlinear multi-agent systems with unknown control directions and unknown external disturbances. Applied Mathematics and Computation331: 274–286.
9.
FanMChenZZhangH (2014) Semi-global consensus of nonlinear second-order multi-agent systems with measurement output feedback. IEEE Transactions on Automatic Control59(8): 2222–2227.
10.
FanMZhangHLinZ (2015) Distributed semiglobal consensus with relative output feedback and input saturation under directed switching networks. IEEE Transactions on Circuits and Systems – II: Express Briefs62(8): 796–800.
11.
GuoMXuDLiuL (2017) Cooperative output regulation of heterogeneous nonlinear multi-agent systems with unknown control directions. IEEE Transactions on Automatic Control62(6): 3039–3045.
12.
HongYChenGBushnellL (2008) Distributed observers design for leader-following control of multi-agent networks. Automatica44: 846–850.
13.
HongYHuJGaoL (2006) Tracking control for multi-agent consensus with an active leader and variable topology. Automatica42(7): 1177–1182.
14.
KhalilH (2002) Nonlinear Systems. Upper Saddle River, NJ: Prentice Hall.
15.
KnornSChenZMiddletonR (2016) Overview: collective control of multi-agent systems. IEEE Transactions on Control of Network Systems3(4): 334–347.
16.
LiuL (2015) Adaptive cooperative output regulation for a class of nonlinear multi-agent systems. IEEE Transactions on Automatic Control60(6): 1677–1682.
17.
LyuJQinJGaoDet al. (2016) Consensus for constrained multi-agent systems with input saturation. International Journal of Robust and Nonlinear Control26(14): 2977–2993.
18.
MaQ (2017) Cooperative control of multi-agent systems with unknown control directions. Applied Mathematics and Computation292: 240–252.
19.
MengZZhaoZLinZ (2013) On global leader-following consensus of identical linear dynamic systems subject to actuator saturation. Systems & Control Letters62(2): 132–142.
20.
NiuXLiuYManY (2017) Adaptive leader-following consensus for uncertain nonlinear multi-agent systems. Asian Journal of Control19(3): 1189–1196.
21.
NussbaumR (1983) Some remarks on a conjecture in parameter adaptive control. Systems & Control Letters3(5): 1690–1695.
22.
PengJYeX (2014) Cooperative control of multiple heterogeneous agents with unknown high-frequency-gain signs. Systems & Control Letters68: 51–56.
23.
RadenkovicMTadiM (2016) Multi-agent adaptive consensus of networked systems on directed graphs. Journal of Adaptive Control and Signal Processing30(1): 46–59.
24.
RezaeeHAbdollahiF (2017) Adaptive stationary consensus protocol for a class of high-order nonlinear multiagent systems with jointly connected topologies. International Journal of Robust and Nonlinear Control27(9): 1677–1689.
25.
SuHChenMZLamJet al. (2013) Semi-global leader-following consensus of linear multi-agent systems with input saturation via low gain feedback. IEEE Transactions on Circuits and Systems – I: Regular Papers60(7): 1881–1889.
26.
SuHJiaGChenMZ (2014) Semi-global containment control of multi-agent systems with input saturation. IET Control Theory and Applications8(18): 2229–2237.
27.
SuY (2015) Cooperative global output regulation of second-order nonlinear multi-agent systems with unknown control direction. IEEE Transactions on Automatic Control60(12): 3275–3280.
28.
SunSZhaoLJiaY (2016) Finite-time output feedback attitude stabilisation for rigid spacecraft with input constraints. IET Control Theory and Applications10(14): 1740–1750.
29.
WangQPengCGaoHet al. (2014) Global consensus of single-integrator agents subject to saturation constraints. IET Control Theory and Applications8(9): 765–771.
30.
WuYZhangHHuangTet al. (2016) Adaptive chatter mitigation control for machining processes with input saturations. International Journal of Robust and Nonlinear Control26(14): 3088–3100.
31.
YinXYueDHuS (2016) Adaptive periodic event-triggered consensus for multi-agent systems subject to input saturation. International Journal of Control89(4): 653–667.
32.
ZhangHChenZFanM (2016) Collaborative control of multivehicle systems in diverse motion patterns. IEEE Transactions on Control Systems Technology24(4): 1488–1494.
33.
ZhangLChenMZSuH (2016) Observer-based semi-global consensus of discrete-time multi-agent systems with input saturation. Transactions of the Institute of Measurement and Control38(6): 665–674.