
Abstract
In this paper, vibration suppression and attitude control for the formation flight of flexible satellites using optimally tuned on-off SDRE (state-dependent Riccati equation) approach is discussed. A formation consisting of flexible satellites has highly nonlinear dynamics and the corresponding satellites are subject to vibrations as well as uncertainties due to the practical conditions. Vibrations that are mainly caused by flexible modes of the satellites disorganize the coordination and hinder the formation stability as well as decreasing its performance and lifetime. Hence, flexibility should be considered in formation model and the coordination control needs to address such challenges. Owing to capabilities of SDRE approach for nonlinear systems, it is used as the coordination control. Satellites are assumed to be equipped with thrusters as their actuators which requires the control to be applied as on-off pulses. To this end, an algorithm is suggested to efficiently convert SDRE control into on-off pulses. For optimal tuning of the controller, the particle swarm optimization (PSO) algorithm is employed. Stability of the system has also been analyzed via a Lyapunov-based approach utilizing the region of attraction concept. The proposed on-off SDRE approach has shown to effectively suppress the vibrations in the presence of uncertainties leading to the accurate coordination of the whole formation while consuming less energy. Simulation results show the capability, efficiency, robustness and stability of the suggested approach.
Introduction
Compared with a single satellite, satellite formation flying technology has several basic privileges including higher reliability, lower cost, more monitoring space for surveillance missions and more mission flexibility (Scharf et al., 2004). Over the past decades, various spacecraft formation flying missions have been implemented with the objectives ranging from studying and monitoring the earth or nearby planets to terrestrial planet findings including Tech-Sat 21, ESA’s CLUSTER mission, ESA\NASA GRACE mission, PRISMA, PROBA-3, LISA, MMS and NOW. Also, some of the missions are planned for the third decade of this century such as SI, MASSIM and Black Hole Imager (Alfriend et al., 2009). The increased number of newer missions leads to more complication and challenges on the dynamic model, control, measurements and facilities requiring more research and studies (Kristiansen and Nicklasson, 2009).
To achieve the objectives of almost all formation flying missions, attitude coordination plays a vital role (Bondhus et al., 2005; Paita et al., 2016; Rouzegar et al., 2017). It includes keeping the antennas or imaging cameras on the target accurately for all the satellites in a formation, adjusting the satellite attitude/orbit for rendezvous and debris removal applications (Paita, 2017; Wang and Xue, 2018). Since lower weight is preferred in future space missions especially for reducing the launching cost, it is favorable to lessen the weight of the satellite. However, this causes less rigidity and more flexibility on satellite structures which leads to vibrations (Di Gennaro, 2003). Also, in practical conditions, some perturbation sources such as micrometeoroid impact, solar radiation pressure, earth magnetic field and also sloshing of liquid fuel can generate disturbances for flexible satellites. The disturbances can make the whole system unstable by producing random vibrations and additional torques on satellite structures mainly solar panels. Hence, the satellite model requires to consider the flexibility and the controller needs to effectively suppress the induced vibrations (Hu and Ma, 2006). Vibration suppression has been studied in several studies. In Liu et al. (2017), boundary control design has been utilized for vibration suppression of a flexible aerial refueling hose with varying length, varying speed, and input constraint. Flexible dynamics are modeled using distributed parameter method described by partial differential equations (PDEs). It employs backstepping controller and considers the saturation as the bound while using Lyapunov’s direct method for stability analysis. Furthermore, Liu et al. (2018) have discussed the vibration suppression of linear cascaded ODE–PDE systems with actuator failures, external disturbances and parameter uncertainties using a robust adaptive control approach and a basic fault tolerant control scheme. Lyapunov’s direct method is utilized to design the control schemes and prove the stability of the closed-loop system.
Coordination control for spacecraft formation flying is divided into centralized and decentralized types. In a decentralized architecture, control efforts are devoted to local control agents. The attitude control system of each satellite acts as the local control agent in a formation. Some of the benefits of decentralized architecture are lower complexity and more fault tolerance (Ghasemi et al., 2018; VanDyke and Hall, 2006). A decentralized coordination architecture is considered in this paper.
Flexible satellites have significant applications (Pukdeboon, 2011); however, little research has been dedicated to their formation flight (Chen et al., 2017). A formation consisting of flexible satellites has highly nonlinear dynamics and the corresponding satellites are subject to vibrations as well as uncertainties due to the practical conditions. The goal of the coordination control is keeping the formation as well as addressing such challenges simultaneously. Among various control approaches, SDRE has shown to be a systematic, simple and efficient algorithm which provides a compromise between the control effort and the state errors. It considers the nonlinearities in the model as much as possible by being capable of having various state-dependent coefficient (SDC) forms that add more degrees of freedom to controller design. Moreover, its state-dependent weighting matrices add more flexibility to design parameters. It is also inherently robust against parametric uncertainties (Cimen, 2008, 2010). Due to the aforementioned privileges of the SDRE approach on the one hand and the challenges of the coordination control of flexible satellites in a formation on the other hand, it is worthy to study the important problem of flexible spacecraft formation flying coordination control using SDRE technique. The satellites in a formation may be subject to input constraints such as input saturation or on-off input (Fu et al., 2018; Huang and Jia, 2018; Rouzegar et al., 2019).
In satellite attitude and orbit control system (AOCS), if the satellites are equipped with thrusters as actuators, it is essential to convert the control signal to on-off signals (Krovel, 2005). There are various techniques for generating on-off signals in which pulse-width pulse frequency (PWPF) technique has shown to be an efficient approach (Khosravi and Sarhadi, 2016; Song et al., 1999).
Tuning the modulator parameters is another challenge. Improper setting of the parameters causes more energy consumption, increased number of thruster firings and also system instability (Hu, 2009). Hence, using a suitable tuning technique is significant. Here, the particle swarm optimization (PSO) algorithm is used to optimally adjust the parameters. Although some studies discussed SDRE control for the formation flight, they have not considered the flexibility of satellites nor thrusters as their actuators. The attitude coordination of the formation highly relies on the accurate orientation of the satellites with respect to each other. Flexible satellites with light weight and large appendages undergo the vibrations that disorganize the coordination of the formation. To overcome such conditions, satellites have to perform excess maneuvers that entail the thrusters to have more firings resulting in more energy consumption. A good control should be capable of suppressing the vibrations rapidly, as well as keeping the formation accurately with efficient energy consumption. As another challenge, since the actuators are thrusters that work in an on-off mode, the control has to be converted to on-off pulses efficiently. This conversion imposes more complexity on the problem as well. Moreover, to apply the proposed controller on the system, the parameter values of model must be known. However, in practice, their actual values are different from their nominal values. Therefore, the designed controller must be robust against the uncertainty in the parameters to maintain its nominal performance. In previous studies, such formation dynamics and conditions have not been taken into account as an integrity and there has been little focus on addressing such issues simultaneously.
Here, due to the aforementioned privileges of SDRE approach as an optimal control and the PWPF modulator tuned by PSO algorithm as an efficient conversion tool, optimally tuned on-off SDRE approach has been employed for controlling the formation flying problem of flexible satellites equipped with thrusters in the presence of uncertainties as the main contribution of the present study. The proposed method has shown to suppress the vibrations of each satellite quickly leading to the accurate coordination of the whole formation.
The paper is organized as follows. In Section 2, attitude dynamics of a single flexible spacecraft are presented. In Section 3, attitude dynamics of the formation flight consisting of flexible spacecraft and SDC form dynamics suitable for SDRE approach requirements are suggested. In Section 4, after introducing SDRE technique followed by PWPF modulator and the PSO algorithm for tuning the modulator, on-off SDRE control approach is proposed. Stability analysis is presented in this part too. Simulation results are discussed in Section 5. Finally, the conclusion is presented in Section 6.
Attitude dynamics of a flexible spacecraft
The reference frames need to be defined first to describe attitude dynamics. The reference coordinates employed through this paper include orbital-reference coordinate, body-fixed coordinate and inertial-reference coordinate. The orbital-reference coordinate has the origin fixed in the center of mass of the satellite. Its z-axis points towards the center of the Earth, the y-axis points to the opposite direction of the angular momentum of the orbital plane and the x-axis is obtained by the right-hand rule. The body-fixed coordinate has the origin in the center of mass of the satellite and coincides with the principal axes. The inertial-reference coordinate has the origin at the center of mass of the Earth. Its x-axis points towards Vernal Equinox, and the z-axis is aligned with the rotation axis of the Earth. Its y-axis is obtained by the right-hand rule.
Any typical spacecraft consists of two structures: one is the body that contains payload instrumentation and control hardware while the other is large flexible appendages. The body needs to be very rigid to overcome mechanical loads during launch as well as satisfying accurate position and attitude torques. However, large flexible appendages contain parabolic antenna and large flexible solar panels that need to be light in weight (Sidi, 1997; Wie, 2008). This induces unwanted vibrations that should be taken into account when designing the controller. There are four main modeling methods for flexible structure of a spacecraft including distributed parameter modeling, discrete parameter modeling, N-body modeling and finite element modeling (Sidi, 1997). Here, discrete parameter modeling is used in which the flexible appendages are regarded as some point masses interconnected via spring elements. The motion is described by ordinary differential equations (ODEs). Consider a spacecraft consisting of a rigid body and two symmetric panels. These panels are modeled by a single discrete mass


Here,
Using the mass-spring concept and multi-mass modeling, the spacecraft model in the body-fixed coordinate can be derived, which is shown in Figure 1.
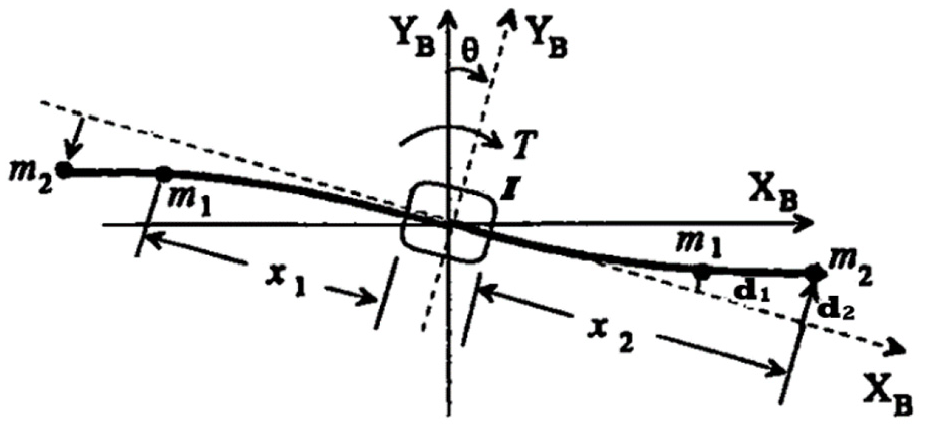
Spacecraft model using multi-mass modeling (Sidi, 1997).
In Figure 1,

where
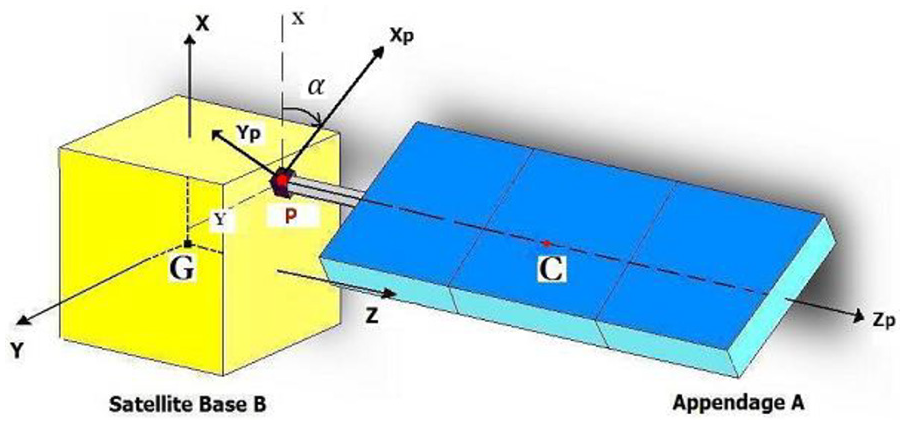
Geometry of a solar panel connected to rigid body of a satellite (Alazard et al., 2008).
According to Figure 2, X, Y, Z describe the orientation of the spacecraft in the body-fixed reference frame while Xp, Yp, Zp show the reference frame of the appendages. In a flexible satellite, since the appendages are not rigid, three modes of deflection can be suggested. The deflections about Xp, Yp and Zp are called in-plane deflection, torsional deflection and out-of-plane deflection, respectively. The most prominent one is out-of-plane deflection. Angle


in which

Also,
Flexible spacecraft formation flying dynamics
There are various types of formation flying architectures. Due to its privileges, a behavior-based decentralized coordination architecture is considered. In a behavior-based formation, the outputs of multiple controllers are united to obtain various behaviors. Station-keeping and formation-keeping are two desired behavior for a spacecraft formation. The single spacecraft attitude control laws represent the station-keeping behavior control terms, while the formation-keeping behavior is achieved by augmenting terms including relative attitude dynamics in the formation.
In attitude synchronization of a decentralized behavior-based formation flying, the total control is a mixture of station-keeping and formation-keeping control behaviors. A decentralized formation flying architecture is shown in Figure 3.
Architecture of a decentralized formation flying.
The decentralized attitude control law for a behavior-based formation is the sum of station-keeping control and weighted formation-keeping control namely
For a formation consisting of rigid spacecraft, the system states include angular velocity and quaternions in which the latter can be substituted by Euler angles too. However, for flexible spacecraft, flexible modes should be added to the system states which makes it a bit more complex. Obtaining a suitable model for the formation flight of flexible spacecraft can be followed by a step-by-step procedure. After introducing the absolute attitude motion, the formation model for rigid spacecraft is described. Then, the dynamics of a formation flight consisting of flexible spacecraft is discussed. Since the controller here is state-dependent, the model needs to be expressed in a state-dependent form. This procedure is described in the following.
Absolute attitude motion
For a single rigid spacecraft,

where

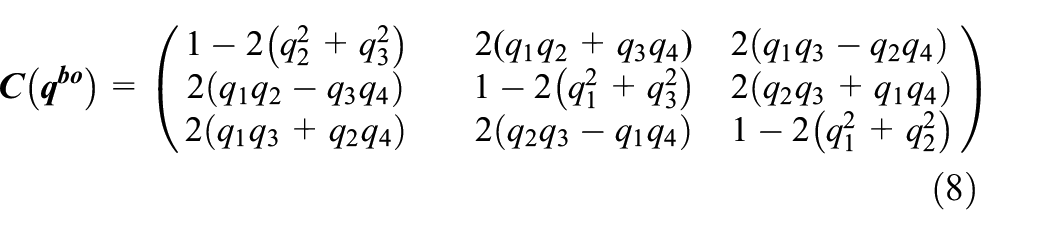
For the flexible spacecraft, the state of the system in orbital-reference coordinate is


where
Relative attitude motion
For the relative attitude motion of the rigid spacecraft,

where
The kinematics differential equations and the dynamic equations of the relative motion in orbital-reference coordinate are obtained by (13) and (14), respectively.


Here,

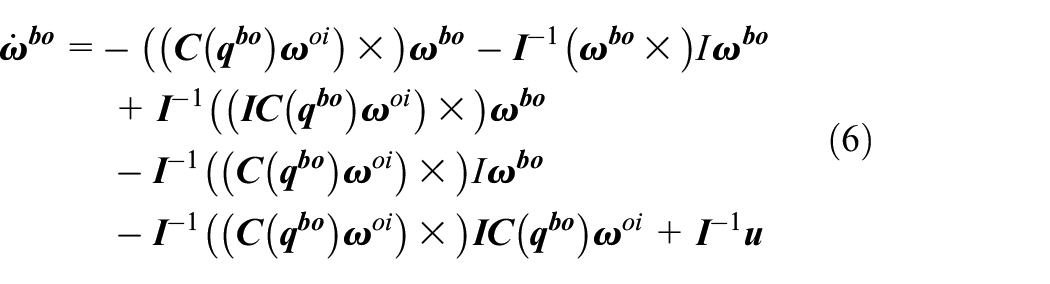
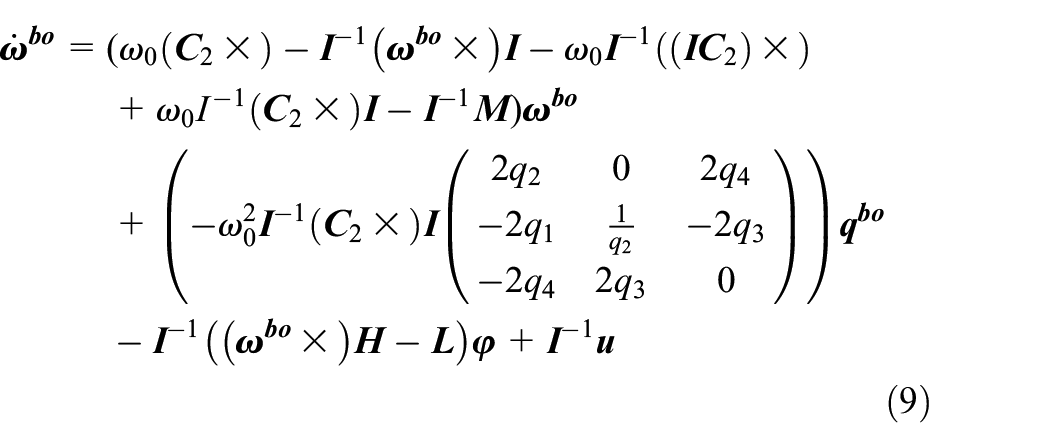
Due to the flexible components in a spacecraft especially the appendages, flexibility needs to be included in formation dynamics. For a decentralized formation consisting of flexible spacecraft, the nonlinear dynamics in the orbital-reference coordinate can be obtained by (16)
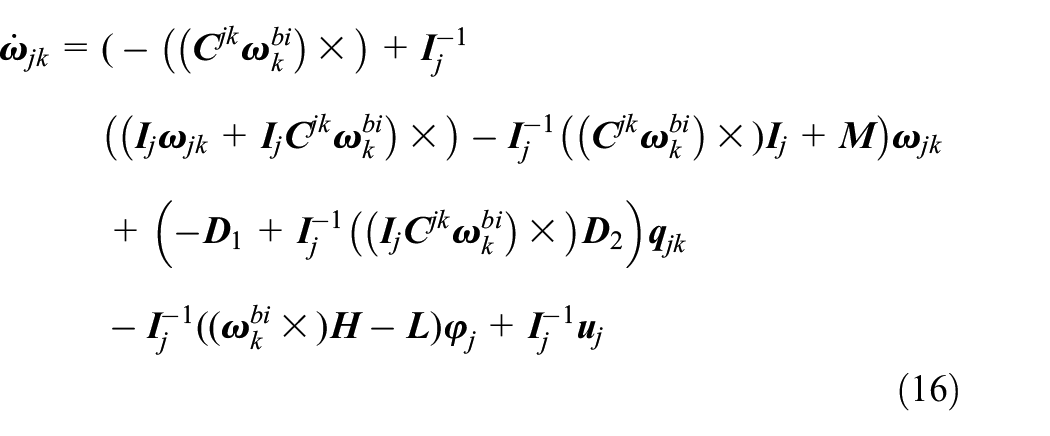
Here,


The parameters were defined in previous equations.
Because of the state-dependent controller, the model needs to be transformed into the SDC form. However, more states should be defined for flexible modes too. Hence, the state vector can be

where the components are defined as (20)









The parameters are defined in previous equations.
In practical conditions, the actual values are different from the nominal values due to the uncertainties. Hence, the designed controller must be robust against uncertainties. To implement the parameter uncertainties of the rigid body and flexible structures, the nominal values of the states (
Having the absolute attitude dynamics of each spacecraft and the relative attitude dynamics which is related to the connectivity of the spacecraft with others, the total control after applying the connectivity (

where
On-off SDRE control
SDRE control
State-dependent Riccati equation (SDRE) control method is a nonlinear control system design approach for nonlinear systems. It converts the nonlinear system into a pseudo-linear structure and utilizes linear optimal control techniques to solve the problem (Xin et al., 2001). It resembles the LQR technique since it uses a cost function and also a trade-off between control effort and state error. A typical nonlinear regulation problem is (22)


where

The solution to this problem is
It should be noted that

It is demonstrated that if
On-off SDRE controller
There are various types of actuators as hardware used to implement control laws such as momentum exchange devices, magnetic actuators, and thrusters. Because of some main disadvantages of momentum exchange devices or magnetic force controllers, reaction thrusters are preferred in space missions (Sidi, 1997). They work in a pulsing mode as a sequence of on-off pulses. Hence, for the spacecraft equipped with thrusters as actuators, the control signal must be applied to the thrusters as on-off pulses. However, converting the signal to the pulses should be done via an efficient way so that it does not have major effects on the performance of the mission or AOCS. There are various types of techniques for converting the continuous control signal to the pulse such as Schmitt trigger control, integrated pulse frequency modulator, pseudo rate modulator, and PWPF modulator. Among these techniques, PWPF modulator has many advantages such as the pseudo-linear operation of on-off thrusters, less fuel consumption, high accuracy and adjustability to advanced control algorithms (Li et al., 2016). These advantages make the modulator an appropriate candidate to be used in spacecraft control systems. PWPF structure consists of a Schmitt trigger, prefilter, and feedback loop as shown in Figure 4.
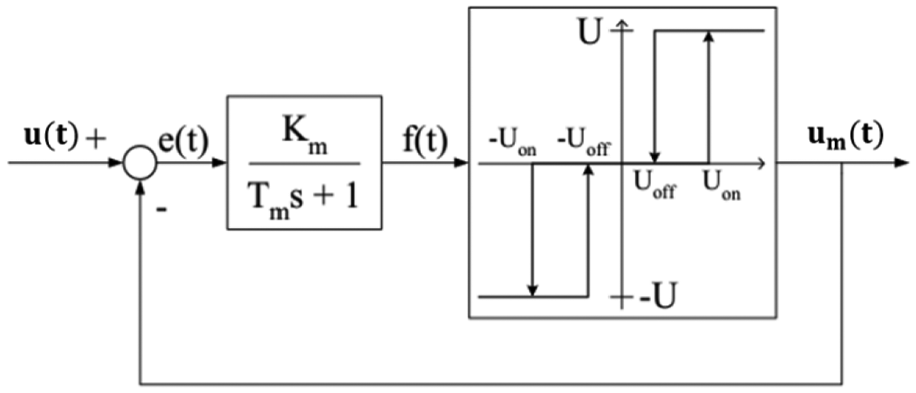
PWPF modulator (Krovel, 2005).
According to the figure,
The performance of the modulator is widely dependent on its static characteristics including on-time, off-time, modulator frequency, saturation input, dead band, and minimum pulse (Krovel, 2005).
Optimal tuning of PWPF
By optimal tuning of the modulator, an appropriate sequence of on-off pulses can be generated to be applied to the thrusters. The PSO algorithm is used for the optimization of controller parameters in many studies such as designing a robust controller (Alfi et al., 2013; Lari et al., 2014), autopilot (Bijani et al., 2016) and identification of nonlinear actuators (Sarhadi et al., 2015). In Khosravi and Sarhadi (2016), tuning knobs of PWPF are obtained by the PSO algorithm.
In PSO, a vector position (

In (17),

In each iteration, velocity vector is varied via its own best position (pbest) and the best position of the population (gbest). The two positive constants

It should be noted that the energy consumption and the error are of great importance when designing the controller. Hence, here, the optimum value obtained needs to satisfy a cost function. An appropriate cost function containing tracking error and control effort is considered as (28)

In this objective function,
In this paper, PWPF-based SDRE controller tuned by PSO as a new scheme is presented. The block diagram of this scheme, which is the result of SDRE controller integrated with PWPF modulator, is shown in Figure 5.
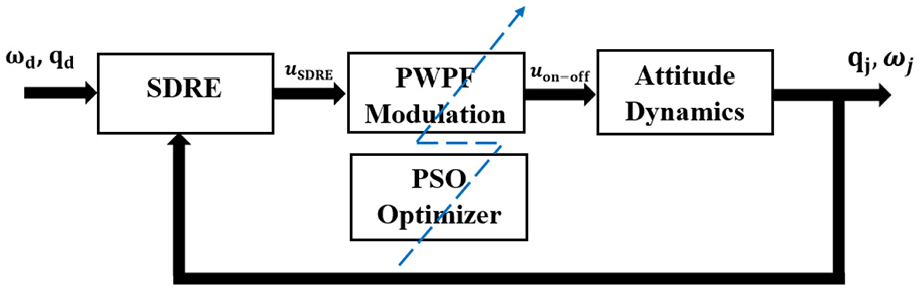
Block diagram of PWPF-based SDRE controller tuned by PSO.
As shown in Figure 5, the modulator is fed with the continuous control and the modulated signals are applied to the system. It should be noted that the optimization is performed on the modulator considering the entire closed-loop system. At each iteration, the modulator is tuned based on the PSO population, search range, weights and other parameters while considering the whole closed-loop system. The time required for the tuning and the accuracy is highly dependent on the complexity of the system and tuning parameters.
Stability analysis
The stability of the whole system depends on the stability of the relative attitude motion between the spacecraft in the formation. Since the global stability of systems controlled by SDRE-based controllers cannot be guaranteed in the general case, stability in such systems is analyzed by estimating the region of attraction (ROA). Various methods for ROA estimation have been introduced. Compared with other approaches, the Bracci method is less conservative and can be applied to autonomous as well as controlled nonlinear systems (Bracci et al., 2006). Due to its fastness and lower computational burden, Bracci method as a Lyapunov-based approach is employed here to estimate the ROA.
If

Lyapunov-based methods use the following theorem for estimating the ROA (Khalil, 2002).
Consider a system as

Then Lyapunov function can be generated as




Systems controlled by the on-off SDRE control approach can use this method for evaluating the stability.
Simulations
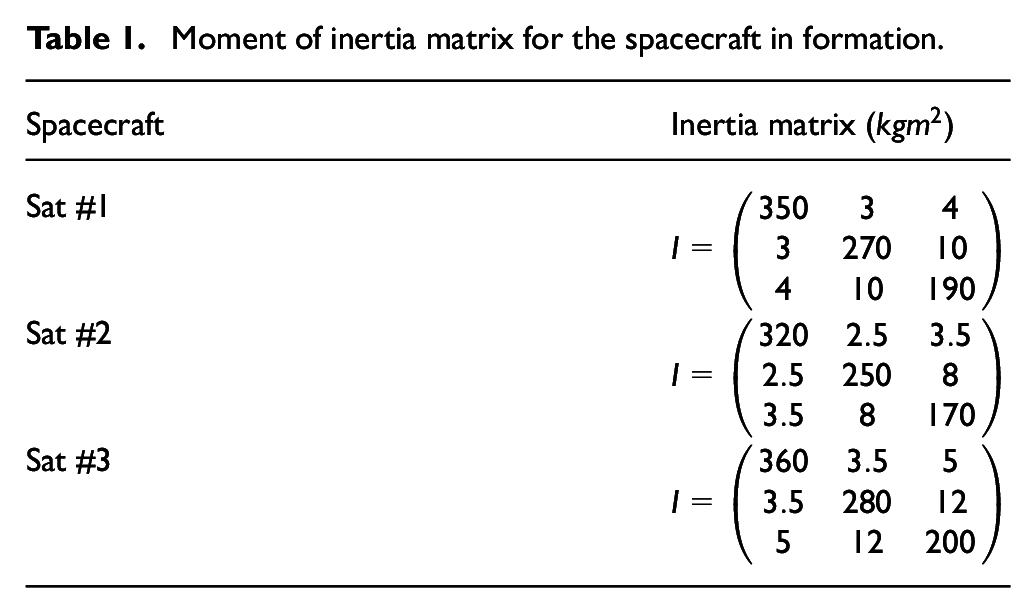
In this part, the simulation of a decentralized behavior-based formation flight consisting of three flexible spacecraft is discussed. MATLAB software was used for the simulations. Some of the specifications of the spacecraft are listed in the following. Table 1 shows the moment of inertia matrix for the spacecraft in Hu (2009).
Moment of inertia matrix for the spacecraft in formation.
Earth gravitational constant and semi-major axis of the satellites are
Also, the initial states are chosen as Table (2).
Initial states of the satellites.

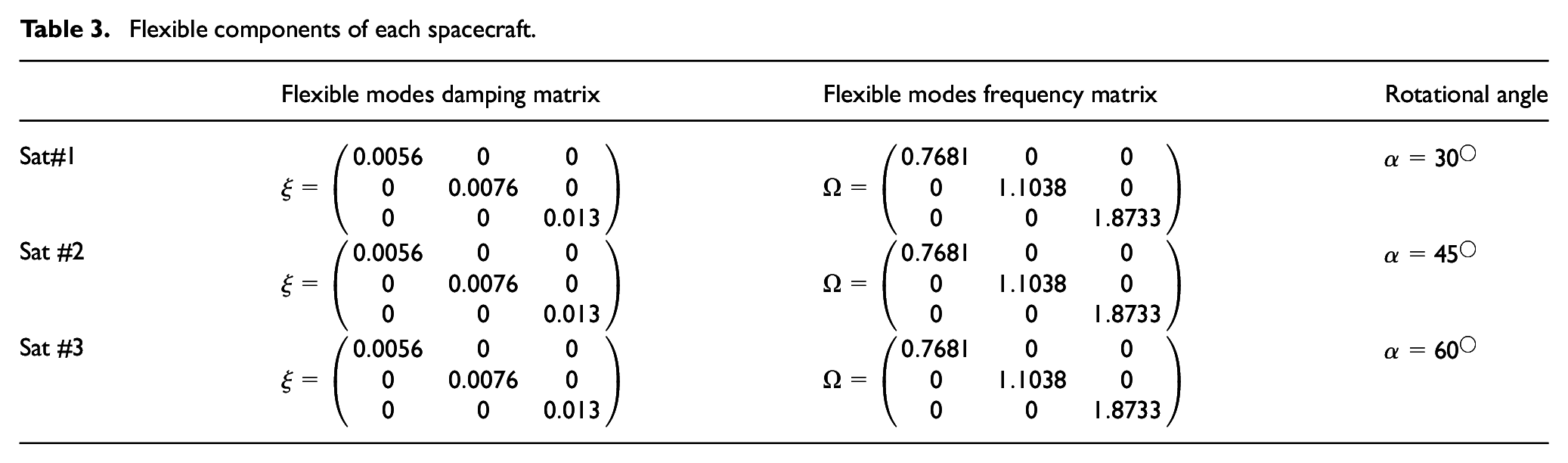
Considering one flexible mode for each axis, the total flexible mode for each spacecraft is three. According to the physical structure and the assumptions, the flexible components of the spacecraft are listed in Table (3).
Flexible components of each spacecraft.
The connectivity (
It should be noted that if
To show the performance and efficiency of the proposed method, the results can be compared with another controller. Since PD controller is a popular control method in control literature and existing publications, the simulations were also executed by PD control method. Hence, the results with PD control are discussed first.
Simulation results by PD controller
The PD parameters for each spacecraft were chosen as
The angular velocity synchronization, quaternion synchronization and the damping of the flexible modes using PD controller are depicted in Figures (6), (7) and (8), respectively. Simulation time was also considered 250 seconds.
Angular velocity synchronization for each axis of each spacecraft by PD control.
Quaternion synchronization by PD control.
Vibrating modes damping by PD control.
According to the figures, it can be seen that the angular velocity and the quaternion have been synchronized well in a short time (about 50 seconds) using PD control. However, it can be seen than the vibrating modes need more time to be suppressed. It shows that the PD control is not suitable here for such dynamics. The control efforts of PD control for each axis for the first satellite are presented in Figure 9.
PD control effort for attitude synchronization for each axis.
It is seen that the PD control is still necessary after the time required for synchronization of angular velocity and quaternion (more than 50 seconds).
Simulation results with the proposed on-off SDRE approach
For the on-off SDRE approach, the SDRE control parameters are as follows

The states are subject to parameter uncertainties. The parameter uncertainty was chosen as
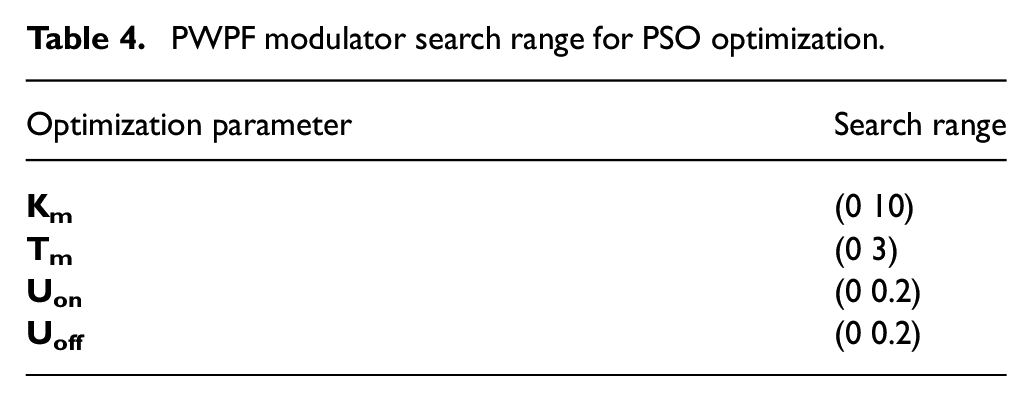
The simulations are presented for the on-off SDRE method for 80 seconds. PSO is used for tuning the modulator parameters. The search ranges for PSO parameters are as Table 4.
PWPF modulator search range for PSO optimization.
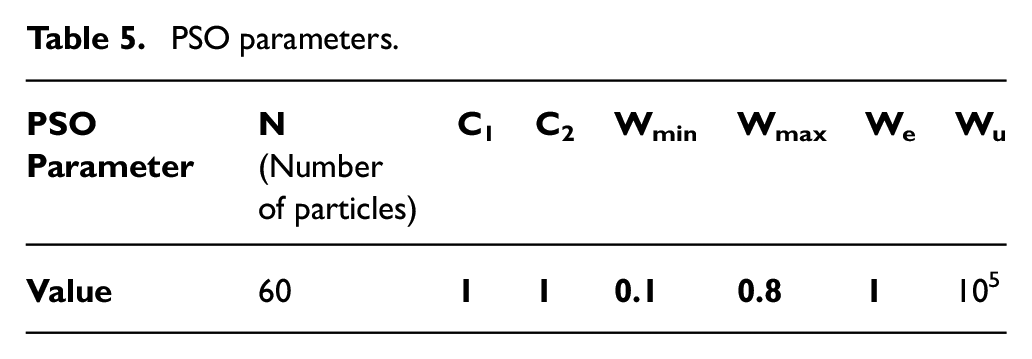
PSO parameters were chosen as Table 5.
PSO parameters.
The amplitude of the modulated signal was selected as
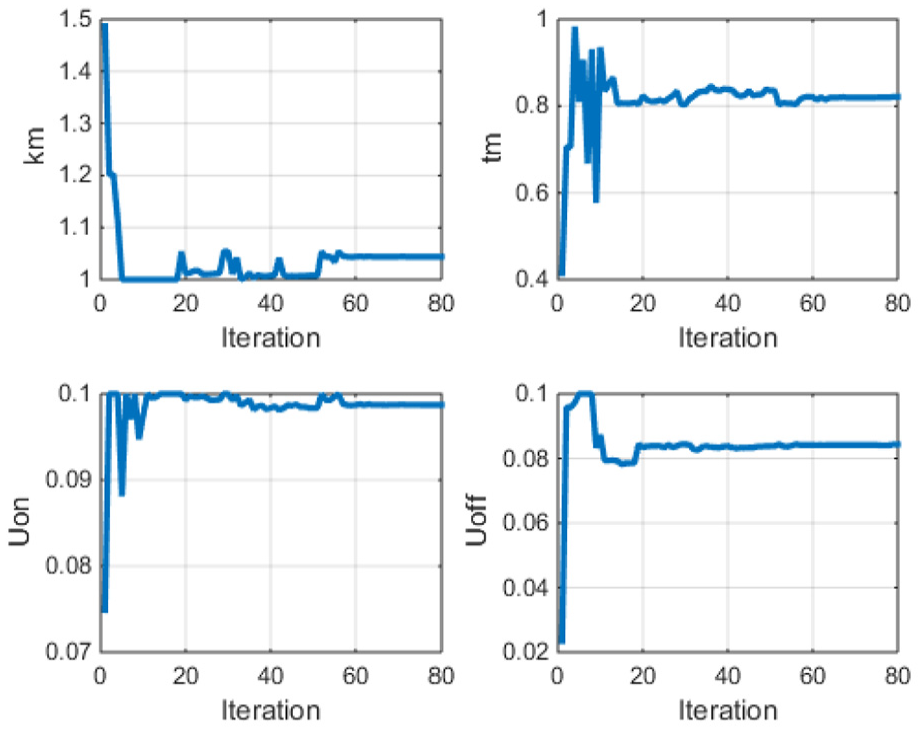
Optimized parameters of the PWPF by PSO algorithm.
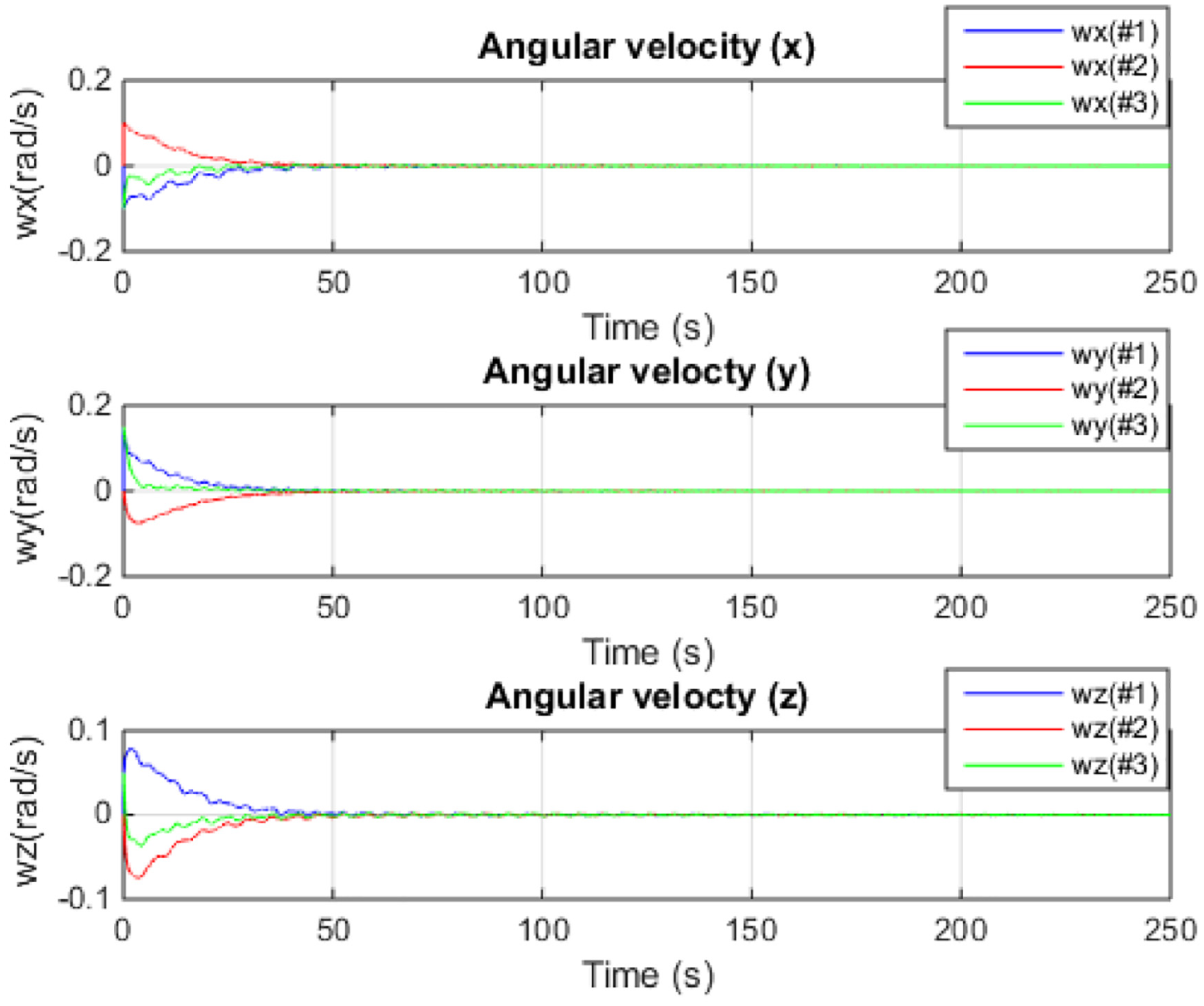
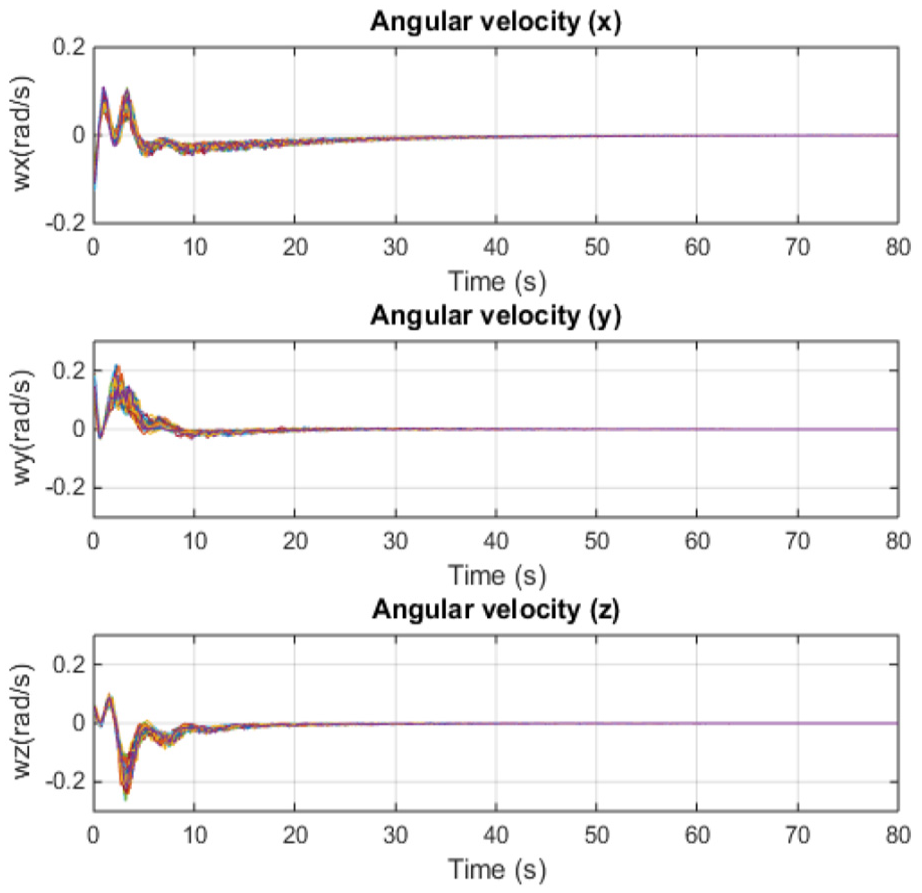
As seen in the figure, modulator parameters have been converged to their appropriate value according to the corresponding cost function and search area for 80 iterations. With such values, attitude synchronization results were obtained as follows. The angular velocity synchronization for the three satellites is shown in Figure 11.
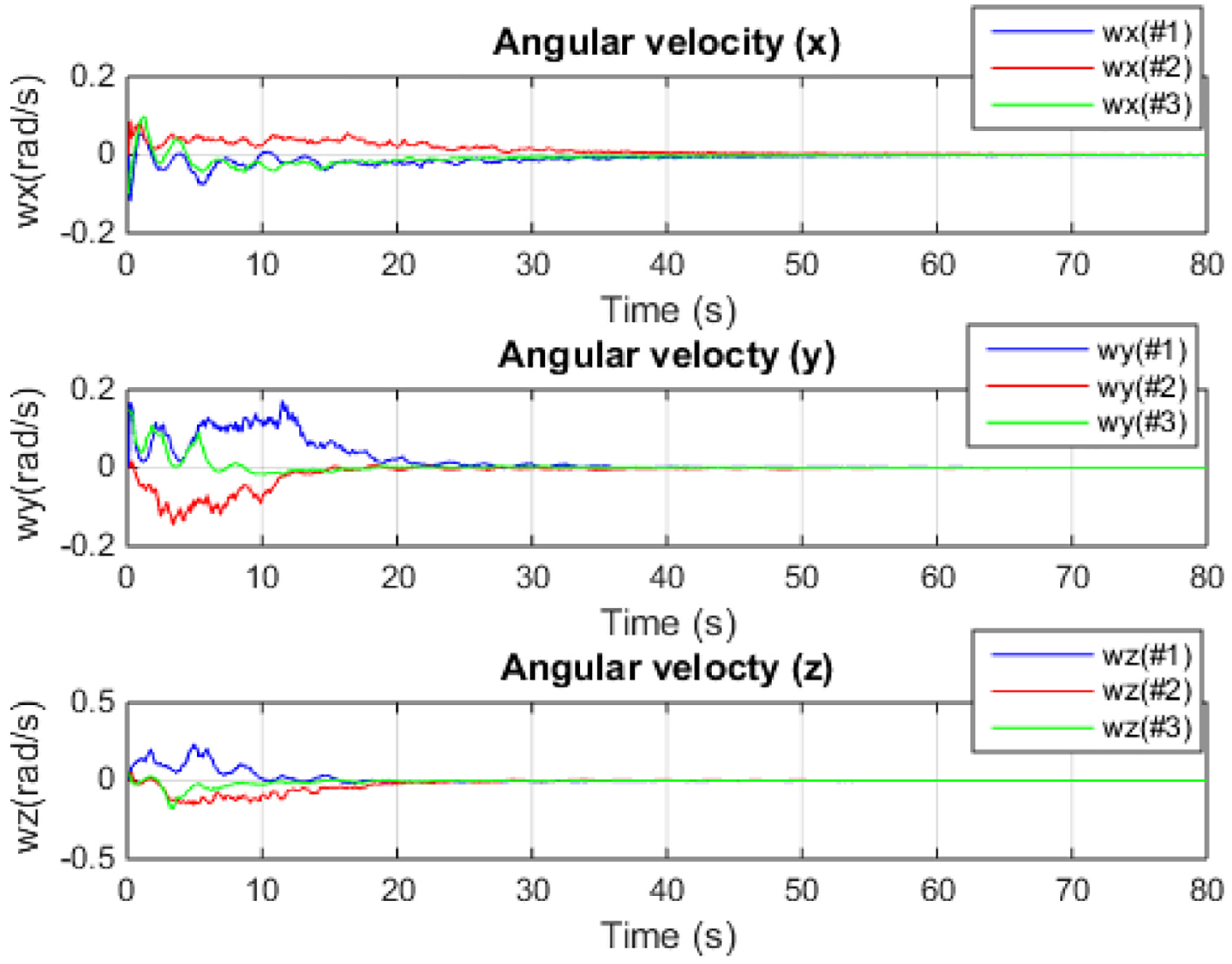
Angular velocity synchronization for each axis of each spacecraft by on-off SDRE control.
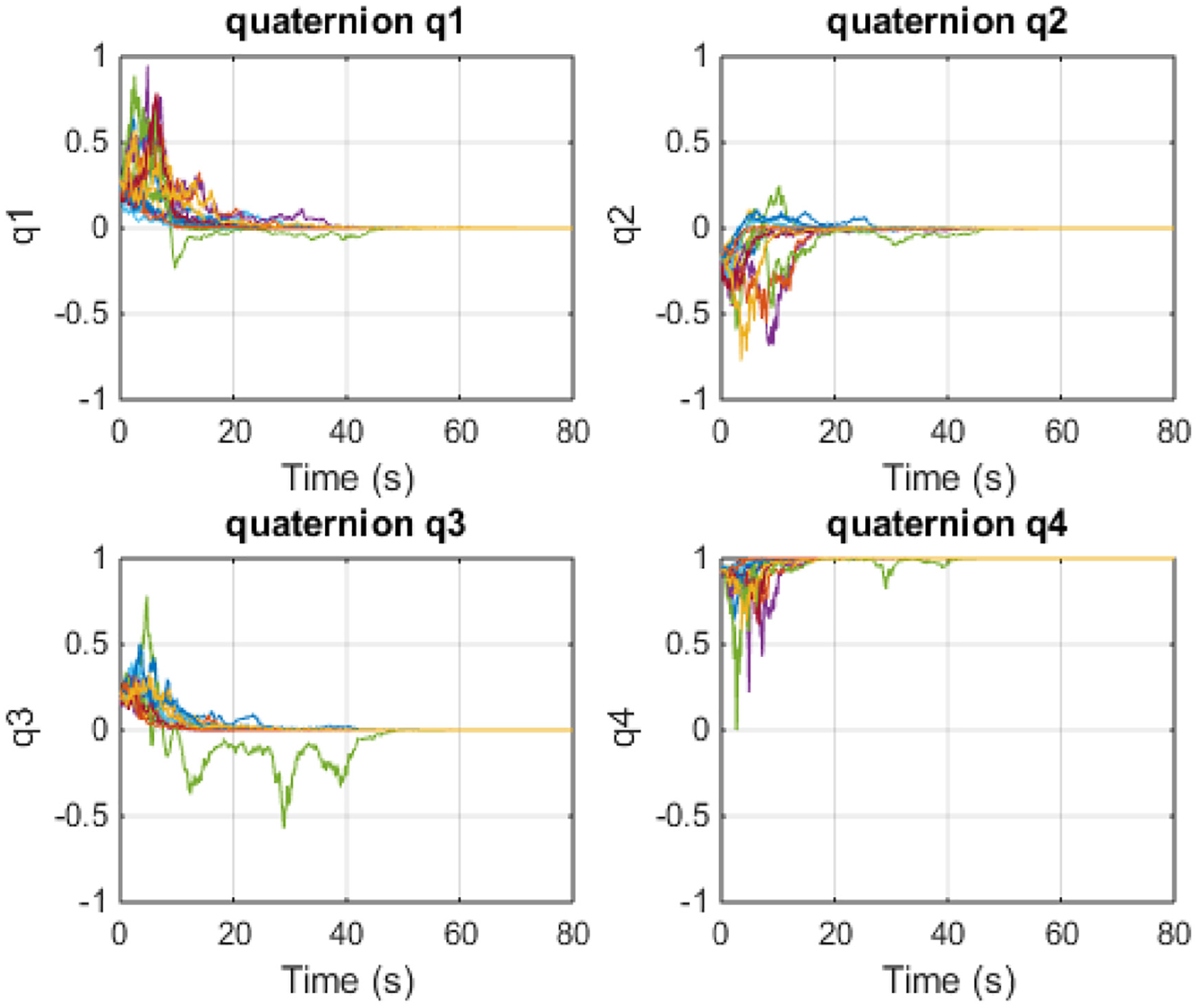
It is observed that satellites achieve zero angular velocity in a reasonable time even in the presence of uncertainty. Small distortions are due to the parameter uncertainties. Quaternion synchronization is depicted in Figure 12.
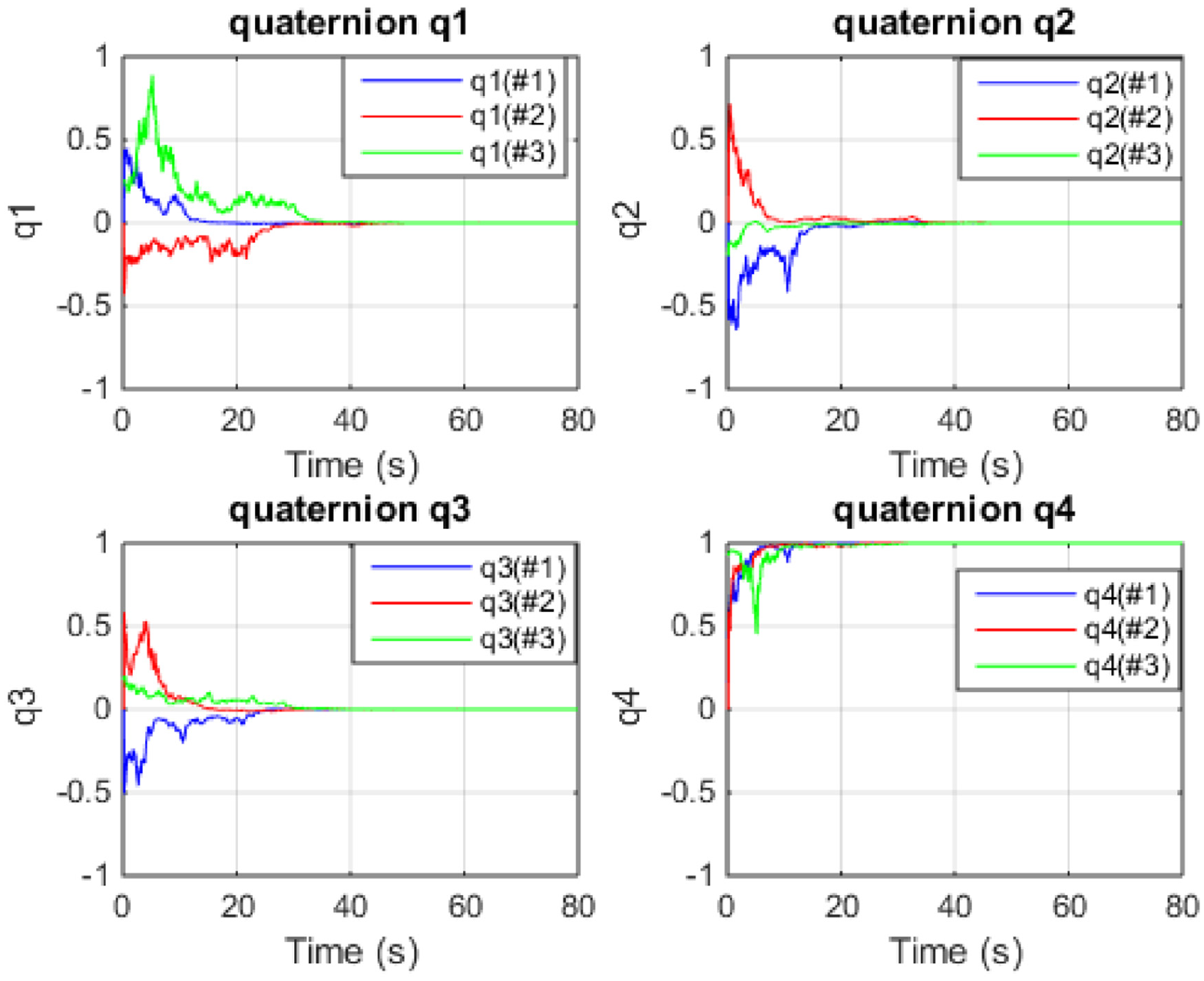
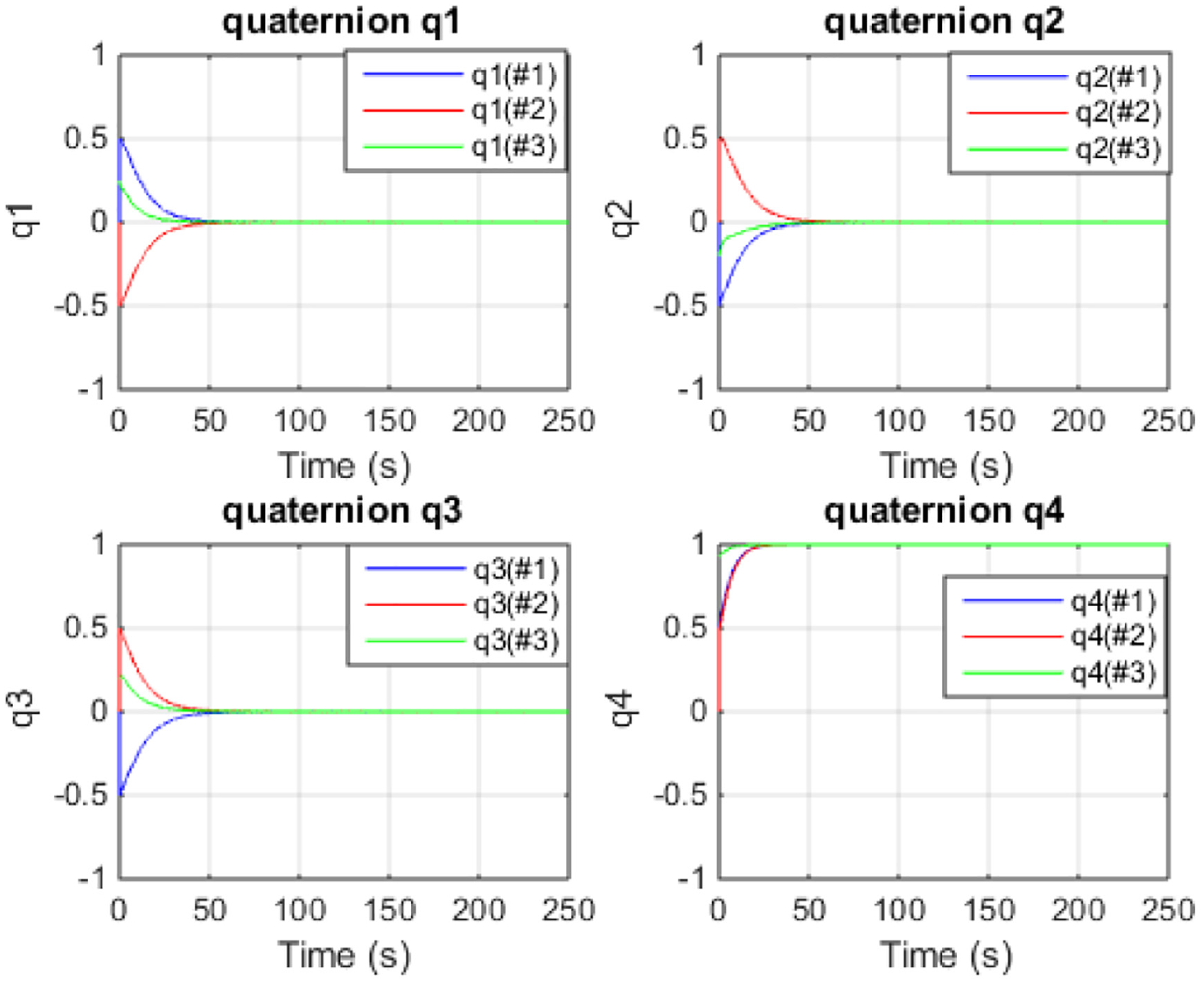
Quaternion synchronization by on-off SDRE control.
It is shown that the quaternions tend to the desired value and they are synchronized well in a reasonable time. It can be seen that the proposed on-off SDRE control has the capability to synchronize the attitude motion even in the presence of uncertainties and on-off thrusters. Compared with PD control results, it can be seen that the angular velocity and quaternion have been synchronized a bit shorter using proposed on-off SDRE control.
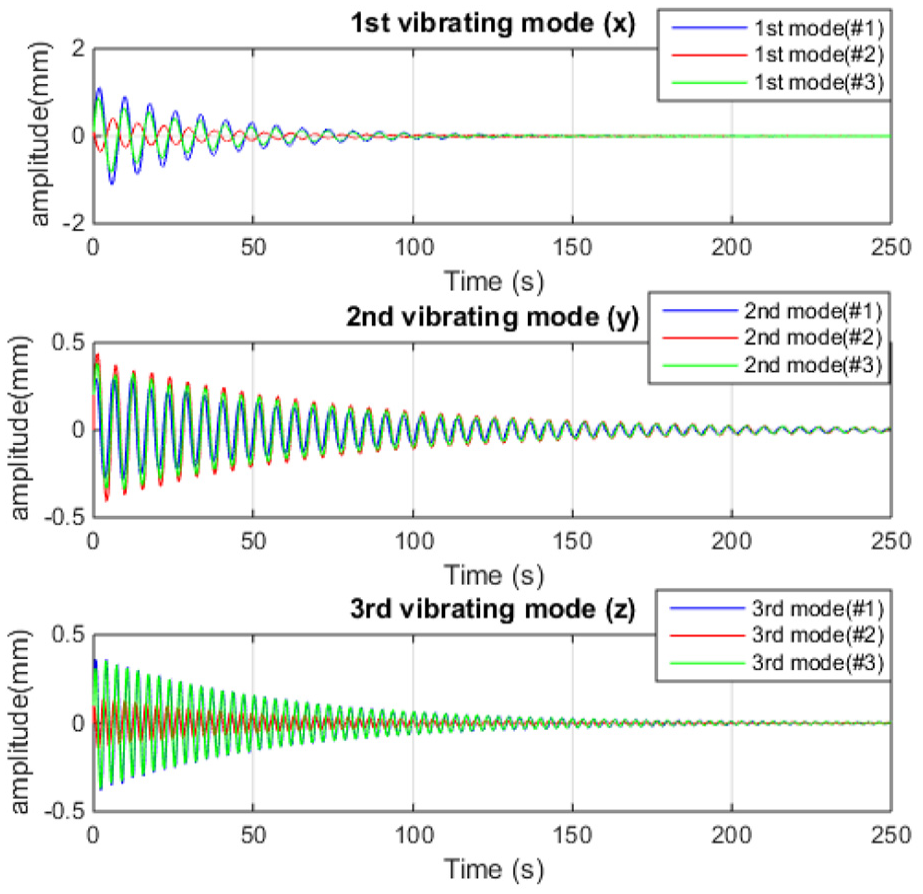
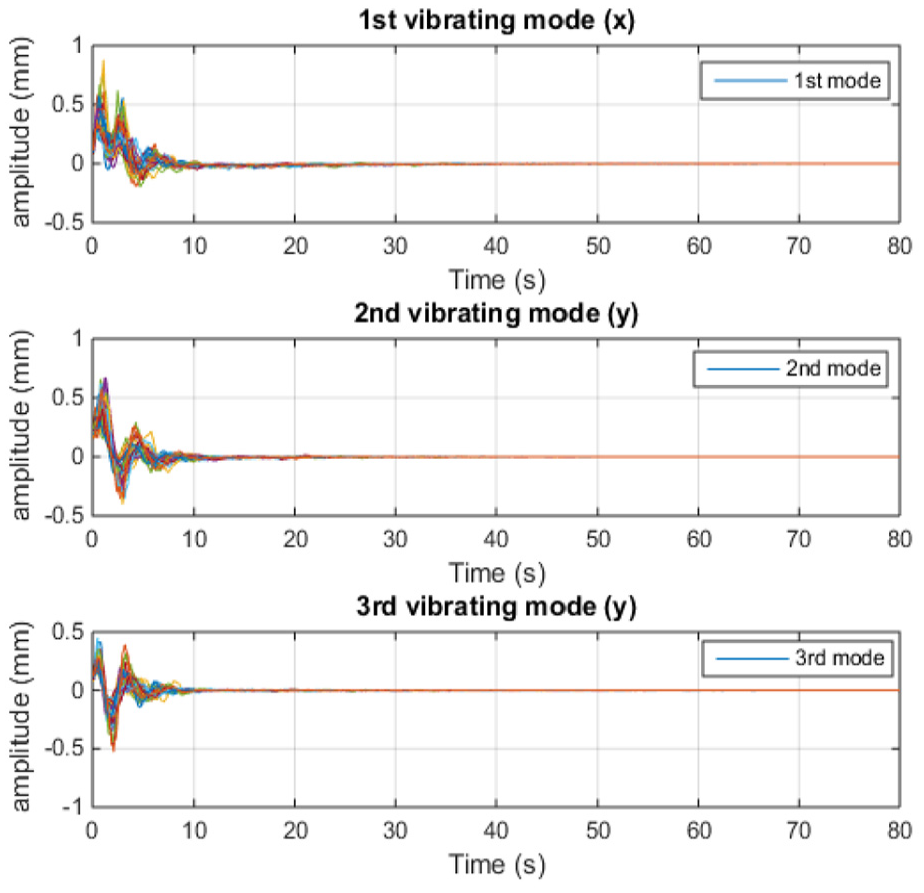
The flexible modes were simulated. It should be noted that the modes should tend to zero to avoid vibrations. Flexible modes are shown in Figure 13.
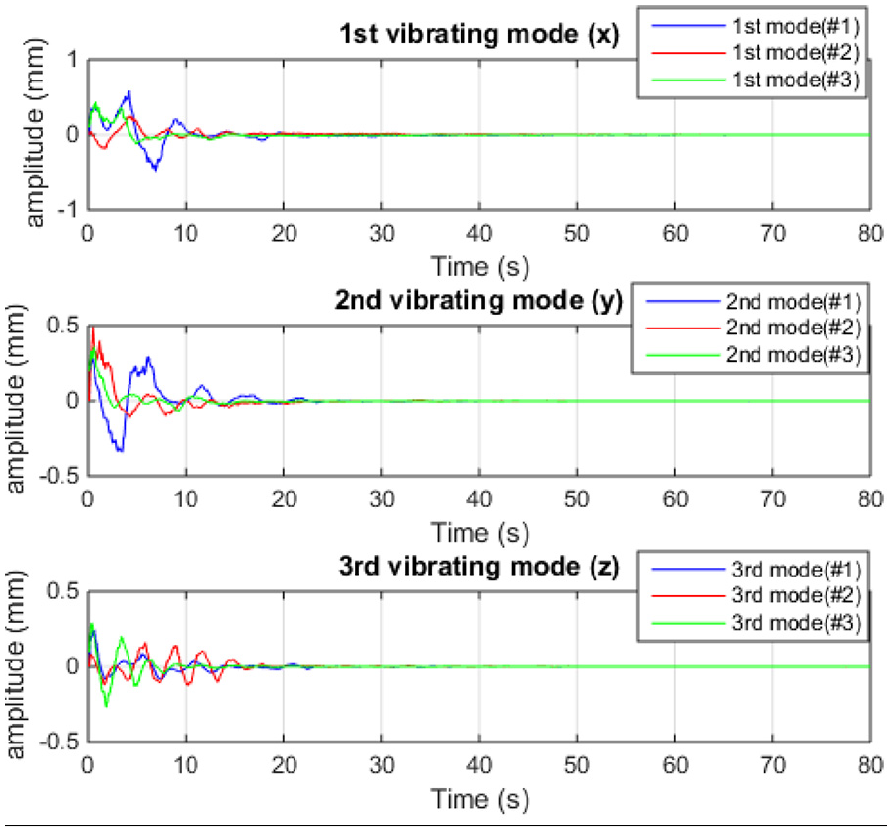
Vibrating modes by on-off SDRE control.
It is seen that the osculating modes tend to zero after a short time for all the spacecraft. Hence, it can be deduced that the controller could suppress the vibrations effectively and more smoothly. Compared with the results for PD control in Figure 8, it can be seen that proposed on-off SDRE approach could suppress the vibrations in quite shorter time. It shows the capability of proposed control approach when facing the vibrations.
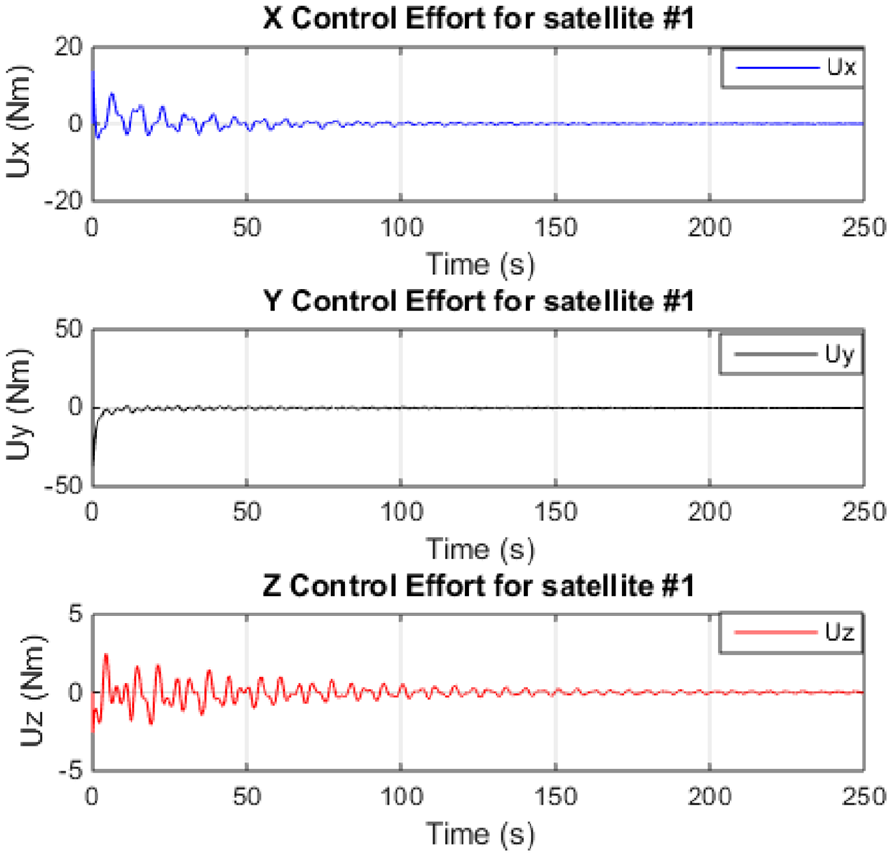
The control effort for one of the spacecraft, for instance the first satellite, is shown in Figure 14.
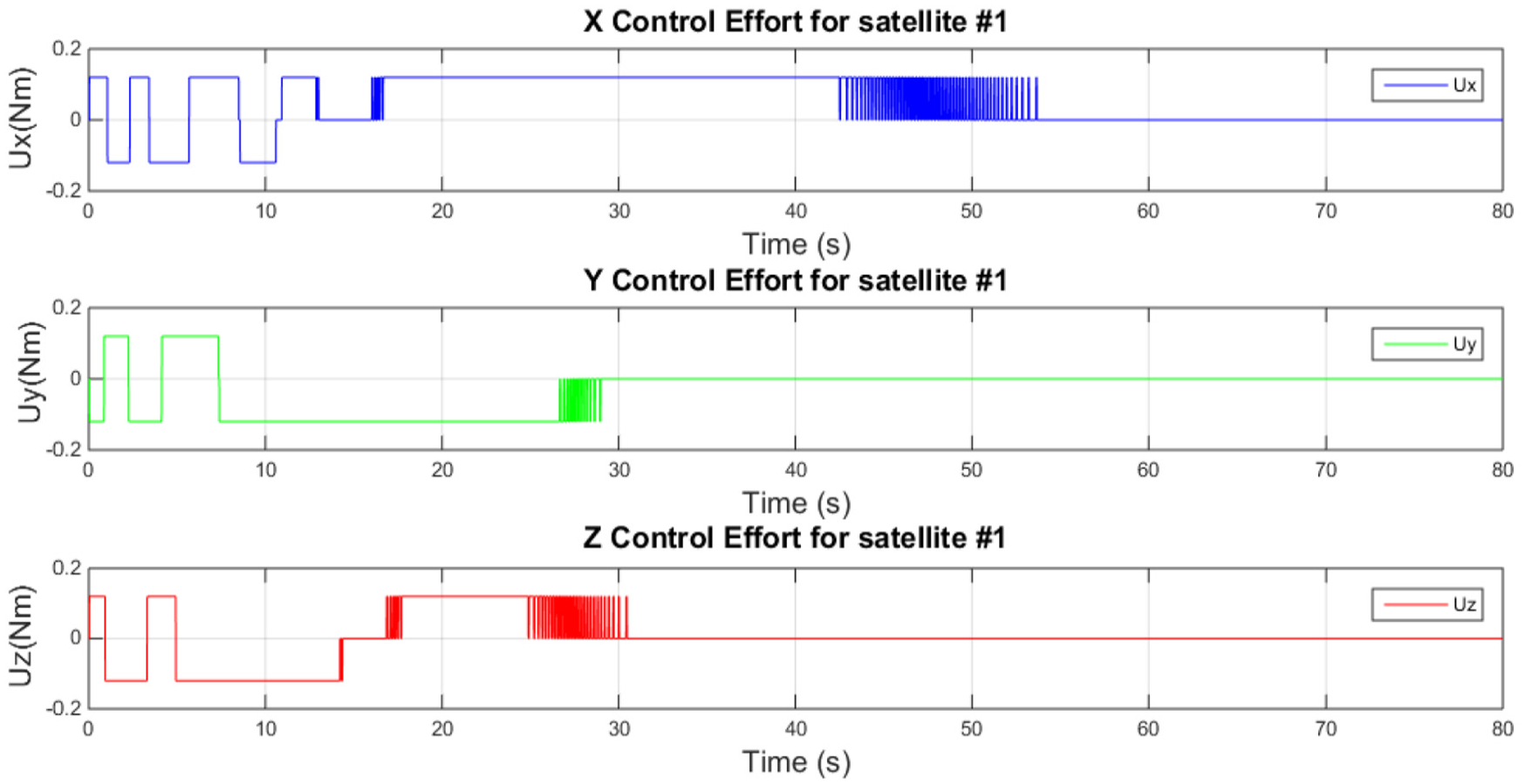
On-off SDRE control effort for attitude synchronization.
According to Figure 14, it can be seen that the continuous control has been converted to pulses with fixed amplitude whose width and frequency have been optimally tuned. It is observed that the control could synchronize the system after a short time for all the spacecraft.
Robustness analysis
Assuming 25% for the uncertainty (
Quaternion tracking of the first satellite for the uncertainty of
Convergence of the angular velocity for the first satellite with uncertainty of
Convergence of the vibrating modes for the first satellite with uncertainty of
It is seen in the figures that the uncertainty is trying to affect the system on both rigid and flexible dynamics but the controller could address the parameter uncertainties so that the tracking has been done within a desired time. Hence, it could be concluded that the proposed on-off SDRE approach is also robust against uncertainties and robustness is validated.
Error analysis
To compare the results of the on-off SDRE control with continuous SDRE and PD control, the errors corresponding to each controller have been presented here. The errors of each state for one satellite including angular velocity, quaternion and flexible modes have been presented in Figure 18.
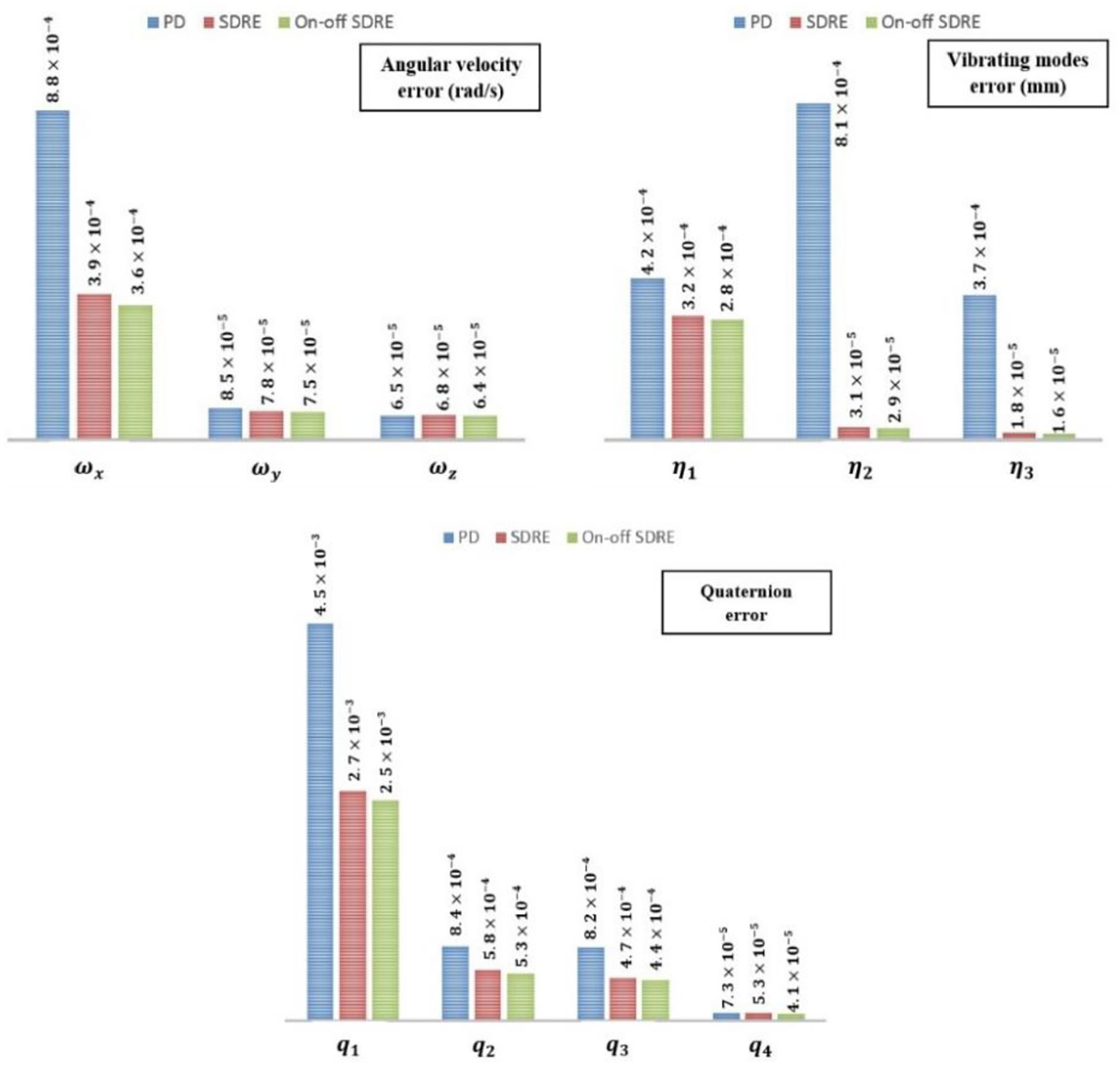
Errors of angular velocity, vibration modes and quaternion for the first satellite using PD, SDRE and on-off SDRE control.
It can be seen that the on-off SDRE control has more accuracy than PD and continuous SDRE approach for almost all parameters. The results for other satellites are somehow the same which have been ignored here for the sake of brevity.
Energy consumption analysis
Here, the energy consumption related to vibration suppression and the total energy of the control efforts have been evaluated. To have a better understanding of the vibration suppression, a vibration energy index as
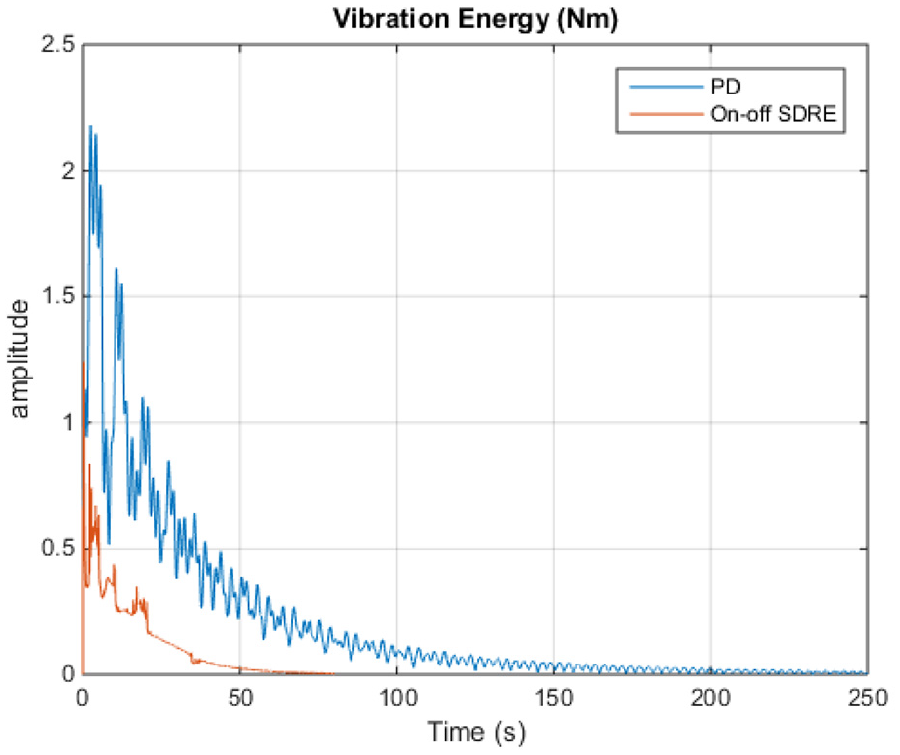
Vibration energy of the first satellite in the formation using PD and on-off SDRE controllers.
It is seen that the proposed method control could neutralize the vibrations significantly faster than the PD. Comparing the results of PD and optimally tuned on-off SDRE approach for the attitude coordination of the formation shows that the proposed method is an accurate method that could provide the attitude coordination of the formation and suppress the vibrations in a significantly shorter time with high accuracy. PD controller could not suppress the vibrations as fast as the proposed method and the accuracy was not achieved as high as the proposed method even by higher PD gains. It is notable that high PD gains lead to more energy consumption, which is a disadvantage in space missions.
Energy consumption is a very important factor in space missions. Here, to show the superiority of on-off SDRE approach, it is compared with continuous SDRE control and PD control according to the following energy index as (35)

where
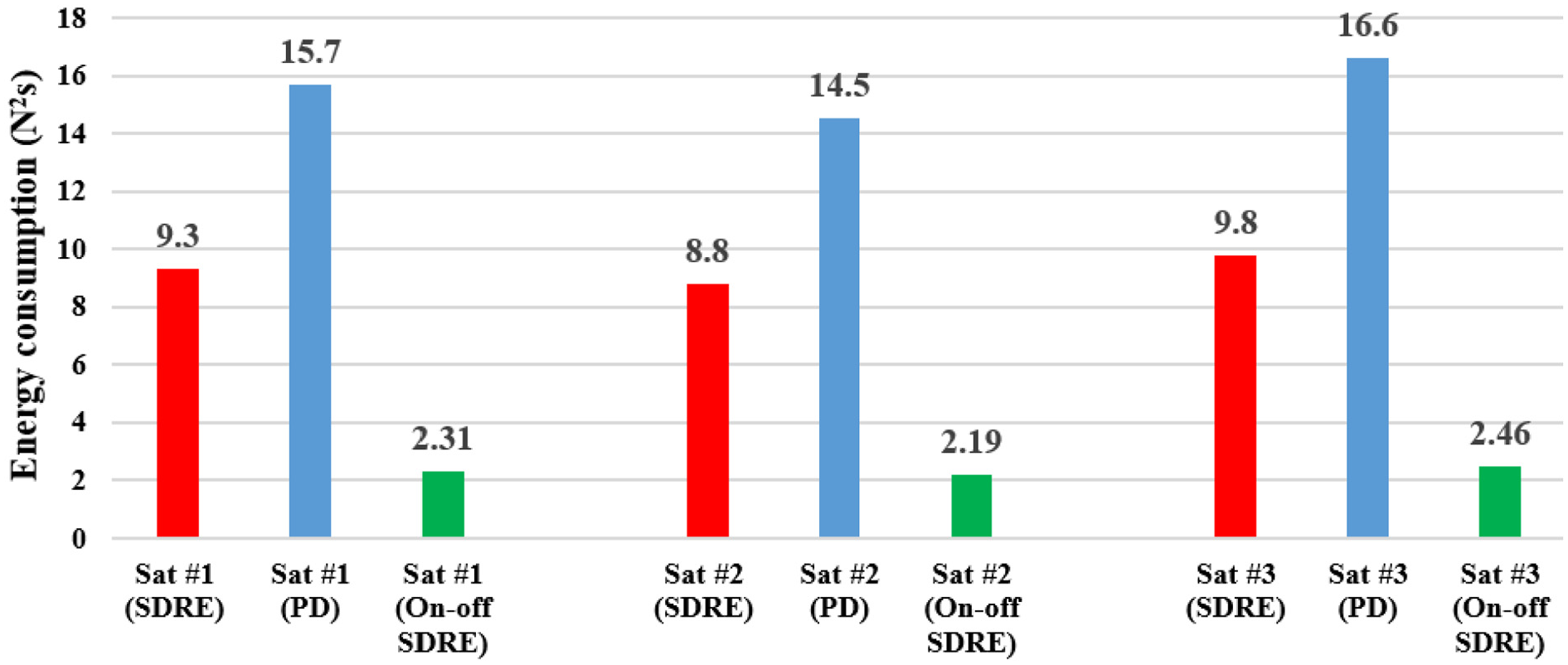
Energy consumption for SDRE, PD and on-off SDRE controller for all the satellites.
For all three satellites, it is seen that energy consumption with the proposed method is less than the continuous SDRE and PD control. It could be said that the on-off SDRE approach could make a more energy-beneficial attitude control for the formation flight of flexible spacecraft which is a significant task in space missions. The reason that the energy consumption with the on-off SDRE approach is less than that of the continuous SDRE is the modulator and its optimal tuning. Modulator parameters have severe effects on the performance and energy consumption of the system. If they are not chosen properly, they may lead to very high energy consumption and even instability of the system. This conversion changes both the width of the pulse and its frequency which makes the control to be off in various times. Also, the modulator limits the amplitude of the on-off pulses which is significantly lower than the average continuous signal.
Stability analysis
In order to analyze the stability of the system with proposed method, Bracci method was utilized.
Keeping the initial relative angular velocities constant with

ROA for relative attitude control using on-off SDRE approach.
To have a better view of the stability region, 2D views that are the projection of the region are also depicted in Figure 22.
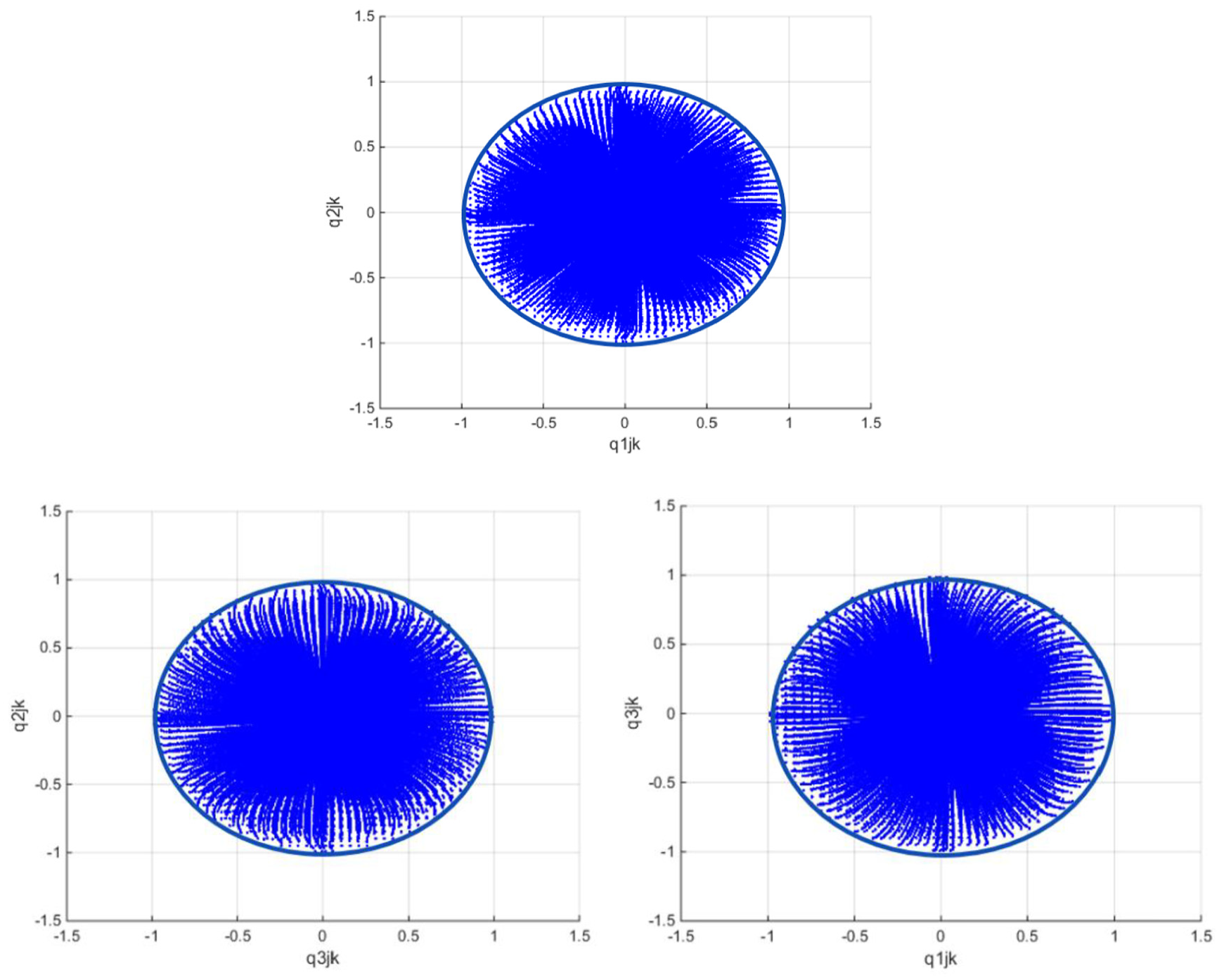
2D views of the ROA for relative attitude control using on-off SDRE approach.
It is observed that the 3D ROA resembles a sphere with radius 1 and 2D ROA are circles with radius 1, which shows that the quaternions have all possible values ranging from -1 to 1. It means that the stability for the relative attitude between the satellites contains all possible areas since quaternions are limited to a circle of radius 1. Hence, it can be deduced that on-off SDRE control could guarantee the global asymptotic stability of the system for all values and the stability of the whole system is guaranteed.
Conclusion
In this paper, optimally tuned on-off SDRE control for attitude synchronization of three flexible satellites in a decentralized behavior-based architecture was presented. A formation consisting of flexible satellites has highly nonlinear dynamics and the corresponding satellites are subject to vibrations as well as uncertainties due to the practical conditions. Vibrations need to be suppressed rapidly to prevent disorganization of the formation. The goal of the coordination control is keeping the formation as well as addressing such challenges simultaneously. Among various control approaches, SDRE has shown to be a systematic, simple, robust and efficient algorithm. Due to the privileges of the SDRE approach on the one hand and the challenges of the coordination control of flexible satellites in a formation on the other hand, SDRE was selected as the controller. However, spacecraft are equipped with reaction thrusters working in a pulsing mode and the control in its continuous form cannot be directly applied. Among various conversion techniques, PWPF modulator was used as a suitable algorithm for generating on-off control signals because of its advantages. Since tuning the modulator efficiently is a difficult task, the PSO algorithm is used for accurate tuning of the modulator. To show the efficiency and performance of the controller, the results are compared with PD control as well. The proposed on-off SDRE approach has shown to suppress the vibrations rapidly, leading to the accurate coordination of the whole formation in the presence of uncertainties with less energy consumption in a desired time. The stability of the whole system depends on the stability of the relative attitude between the spacecraft in the formation which has been evaluated here by a Lyapunov-based approach utilizing the ROA concept. It has been deduced that the on-off SDRE control could guarantee the global asymptotic stability of the system. Simulation results show the validity and efficiency of the proposed method.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.