
Abstract
A distributed event-triggered consensus control protocol is proposed for a class of nonlinear multi-agent systems with switching topologies. The nonlinear dynamics and switching topologies are considered simultaneously to adapt to some actual scenarios. To economize the communication resources, a distributed event-triggered mechanism is established to decrease the consumption of communication resources. The new event-triggered mechanism is constructed by the information of distributed errors, which can fully utilize communication relationships among agents to control the timing of events. A class of negative exponential functions is added to the event-triggered condition as the event-triggered mechanism is applied for the presented multi-agent systems. The design of event-triggered condition can reduce the occurring frequency of events when the adjusting time of control scheme begins at an initial small amount period of time. Finally, the simulation results are provided, which verify the feasibility and effectiveness of the designed event-triggered consensus control strategy for the presented multi-agent systems with switching topologies.
Keywords
Introduction
Multi-agent systems (MASs) have attracted a great deal of attention in the past few decades, due to their promising performance in various pragmatic applications (Bhowmick and Panja, 2019; Li, 2015; Liu et al., 2022; Olfati-Saber et al., 2007; Wei et al., 2021; Wen et al., 2017; Zheng et al., 2021), which have received dramatic advances by the endeavors of researchers. One important problem growing out of MASs is to coordinate the states of all agents to accomplish the control assignment by employing distributed protocols, which is known as the consensus control issue. The consensus control can be divided into leader-follower consensus and leaderless consensus. The achievement of consensus control strategies primarily relies on the mutual communication among agents, which is commonly called graph theory. On the other hand, according to the direction of the information interaction among agents, the corresponding topological graph can be divided into directed graph and undirected graph. For instance, the consensus control issue was studied for a class of MASs with stochastic noises and undirected topology when the MASs suffered from the influence of binary-valued communication in Zhao et al. (2019). In Ni et al. (2021), a fixed-time consensus control approach was proposed for second-order MASs with a directed topology graph, and a nonsingular terminal sliding mode consensus control scheme was developed to realize the goal of tracking control.
In reality, the communication relationships among agents maybe changeless, which is called the fixed topology structure. However, to satisfy the requirement of certain natural and pragmatic coupling systems, the communication relationships need to be alterable among agents. Therefore, to cope with the transformation of various modes, the concept of switching has been studied in many fields (Li et al., 2020; Su and Huang, 2012; Sun et al., 2022). Accordingly, the switching topologies theory has been widely studied in the area of MASs (Lu et al., 2017; Saboori and Khorasani, 2014; Zhai et al., 2021). For instance, the issue of uncertain switching topology was studied for a class of MASs with time delays (Savino et al., 2016), and the variations of topology structure were modeled by utilizing Markov jumping with uncertain transition rates. Moreover, the issue of distributed consensus control was investigated for a class of linear MASs with switching topologies in Wen and Zheng (2019), and the approach of multiple Lyapunov functions was proposed satisfying the characteristics of Laplacian matrices. In Razaq et al. (2020), the property of average dwell time was used to govern the variation of topology structures which relaxed the bound of classical dwell time for switching instances. Based on the local design and approach of multiple Lyapunov functions, the consensus tracking goal was achieved for a class of nonlinear MASs. Unfortunately, most of results about the consensus control assume that it is continuous between the communication and the sensing of information, which may result in some unnecessary waste of communication resources to be temporarily used.
To overcome intermittent communication difficulties and reduce communication burdens, the event-triggered control (ETC), as an effective control technique, can enable the manipulation of continuous-time systems under intermittent communication, as well as the occupation of communication resources can be reduced simultaneously. Therefore, the ETC technique has been broadly concerned in recent decades (Li et al., 2021a, 2021b; Nowzari et al., 2019; Wang et al., 2022; Yang et al., 2021; Yu et al., 2022; Zegers et al., 2022; Zhang et al., 2020; Zhou et al., 2021a, 2021b). In particular, the ETC mechanism is normally composed by threshold and evaluation mechanism. For instance, in Hao et al. (2021), the consensus control issue of heterogeneous linear MASs under connected digraphs was studied, and the information transmissions of event-triggered and topology switchings were considered. By using the distributed information, the distributed ETC scheme was developed in Qian et al. (2020), and the issue of distributed event-triggered adaptive consensus control was investigated for a class of MASs with disturbances. In addition, it is disadvantageous for system if the event is triggered frequently at the initial stage of tuning. Hence, to avoid the occurring of this issue, an initial value is added to the design of event-triggered condition, and the initial value is unprevailing for the adjusting process of system after a period of time. Based on the design approach of event-triggered condition, the controller has full adjustment time at the beginning, such that the value of controller avoids frequent changes. Therefore, this control scheme can eliminate the frequent jitter of the actuator to some extent.
Summarized by the above discussions, the event-triggered consensus control issue is studied for a class of nonlinear MASs with switching topologies in this paper. Based on the information of the distributed errors, the distributed ETC scheme is designed to reduce the communication burdens. The frequent jitter of actuator can be avoided at the initial transient time based on the proposed event-triggered mechanism. The property of average dwell time is considered to broaden the communication network requirements. The main contributions of this paper are summarized in the fllowing: (1) First, a distributed ETC scheme is proposed in virtue of the distributed error, and the communication burdens of MASs are reduced. Then, an attenuation function is added to the threshold value design of event-triggered condition in this paper, such that the controller can avoid frequent changes at the initial operating period. (2) Second, to adapt the control design scheme of some actual MASs, the influences of nonlinear dynamics and switching topologies are considered for the presented MASs in the implementation of event-triggered consensus control scheme. (3) Finally, the property of average dwell time, as adjusting criteria of switching signals, is utilized to govern the switching sequence for MASs with topology graph.
The rest of this paper is introduced as follows. The relevant preliminaries are described in the second section. The third section carries out the design of the distributed event-triggered consensus control scheme. The simulation example is shown in the fourth section. The fifth section gives the conclusions of this paper.
Preliminaries
Graph theory
In the consensus control scheme of the presented MASs, the communication among agents is indispensable. The communication relationships are described by the graph theory, and also the theory of switching topologies is required in this paper. Specifically, the MASs are constituted of
In this paper, the issue of switching topologies is studied in the presented MASs, and the concept of average dwell time is utilized, which allows the fast switching to relax the bound of dwell time constraint. At first, the concept of average dwell time is provided in the following.

holds for all
Based on the graph theory and the definition of Laplacian matrix,

where
Problem statement
In this section, a class of MASs with one leader’s agent and

where
Next, the leader agent’s model is constructed in the following

where
Under Assumption 1, it can be obtained that for each

are feasible for some positive-definite matrices
For the context of MASs, the communication among agents is essential to complete the control task. Based on the communication relationships among

Before completing the design of the next control scheme, the following lemma is introduced, which describes the connection between two real matrixes with quadratic forms.


where
Distributed event-triggered control scheme
In this section, the process of designing the distributed event-triggered consensus control is provided. The distributed event-triggered errors can be represented as below

Then, the next triggered time

where
Event-triggered consensus control design
To accomplish the tracing consensus control objective and reduce usage of the communication resource, the ETC scheme is used to develop a class of distributed controller. Then, based on the distributed information of MASs with switching topologies, the distributed event-triggered controller is designed as

where
Furthermore, according to the Kronecker product operation, the model of MASs can be expressed as

Similar to the operation of equation (12), to guarantee the proper calculation, the dynamics model of leader agent can also be transformed as the following equation

where
The state tracking error can be defined as

Based on the above discussions, the following theorem can be obtained.

and the tracing consensus errors are bounded. Moreover, the average dwell time constraint needs to satisfy the following condition


Next, the derivative of equation (17) is obtained as follows

Based on equation (14), we can get
Then, based on the Lipschitz condition of Assumption 2, one has
Next, according to equation (11), one has
The gain matrix

Based on equation (9), it yields that
Then, according to equation (7), it holds

Based on the event-triggered condition equations (10) and (15), equation (24) can be transformed as

Hence, it gets from equation (25) that

Defining

as

it can be obtained that

For

Based on inductive reasoning, it has

By Definition 1, it yields that

where
Furthermore, the event-triggered control mechanism is applied for the tracking consensus control in this paper. To guarantee the feasibility and effectiveness of the proposed event-triggering control mechanism, the Zeno behavior needs to be excluded. In other words, the phenomenon of an infinite number of events needs to be avoided in a finite time interval. The following theorem is given by the relevant results.

Next, the upper right-hand derivative of
where
Moreover, based on the event-triggered condition equation (10), it yields that

thus, it has

where
Numerical example
In this section, a numerical example is provided to demonstrate the effectiveness of the proposed event-triggered consensus control approach. It assumes that the presented MASs have five agents, and the fifth agent is defined as the leader’s agent, and the communication topologies among agents are shown in Figure 1. The influence of switching topologies is considered in this paper, so the switching signal
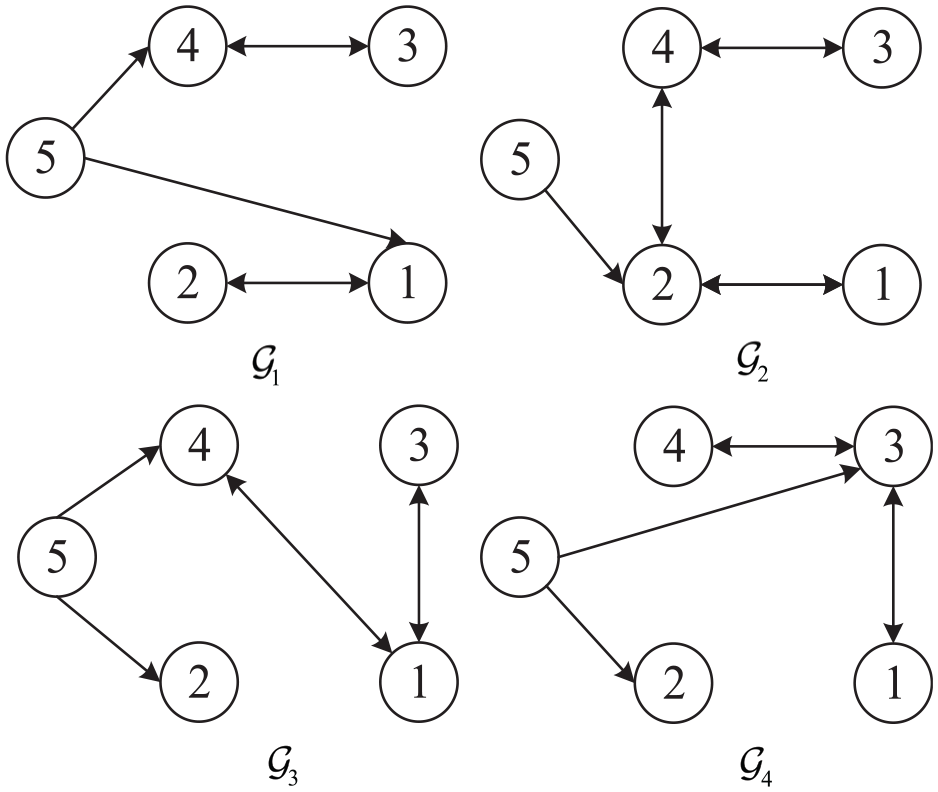
Communication switching topologies.
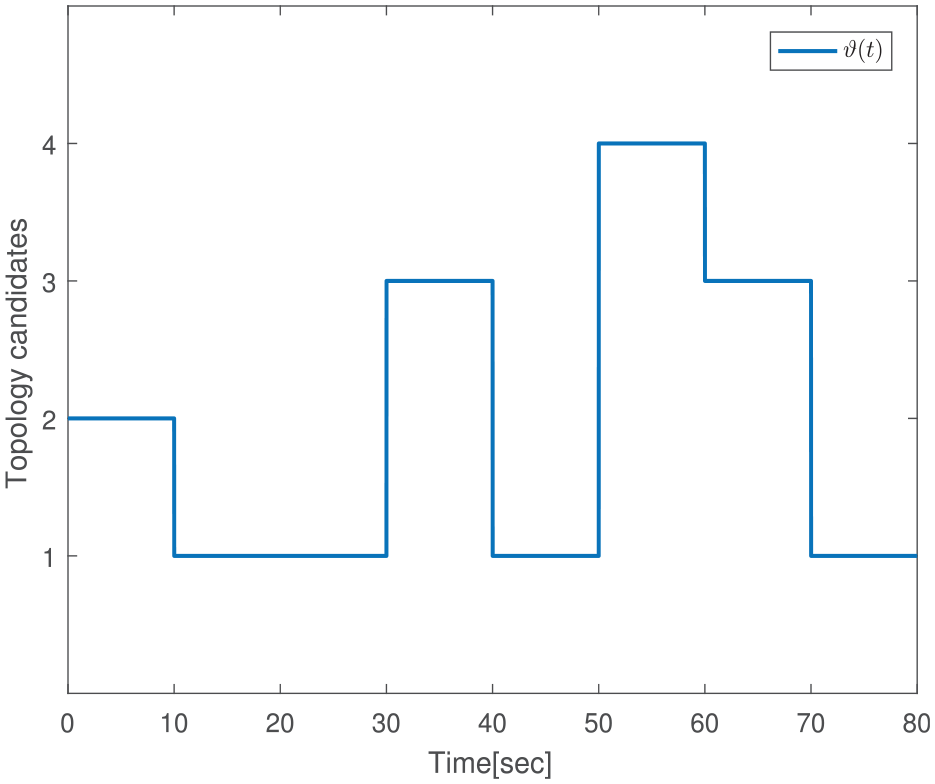
Switching signal function
The parameters of MASs model are provided as follows

The state space matrices can be chosen as

To satisfy Assumption 1, the following values are set:
Besides, the initial states of MASs are given as
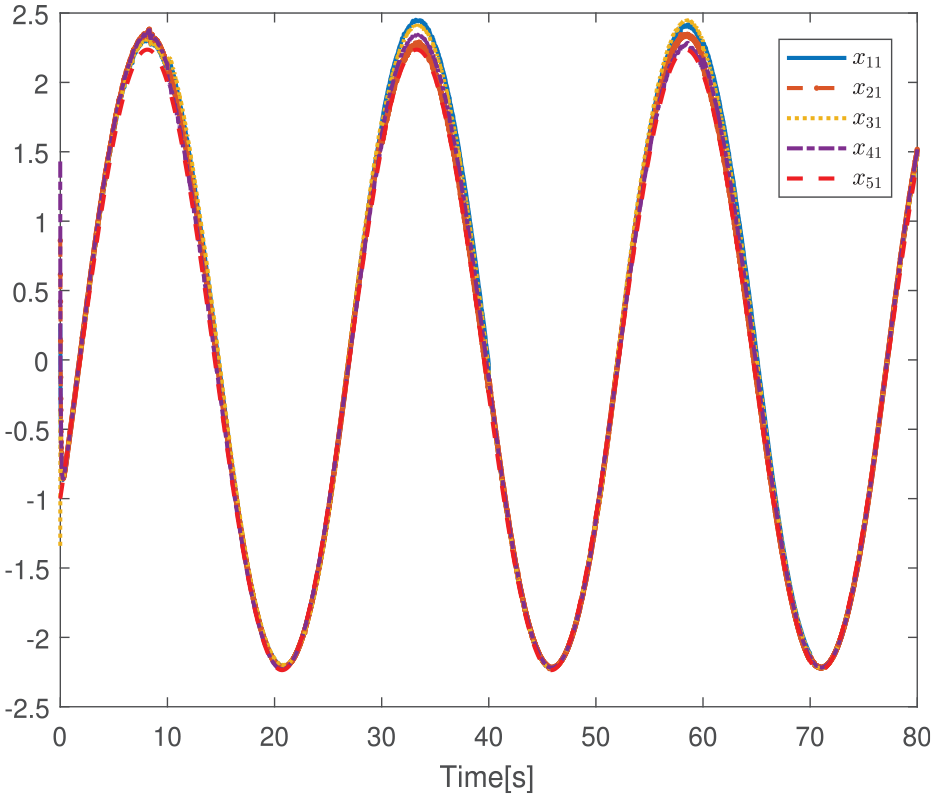
The tracking trajectory of states
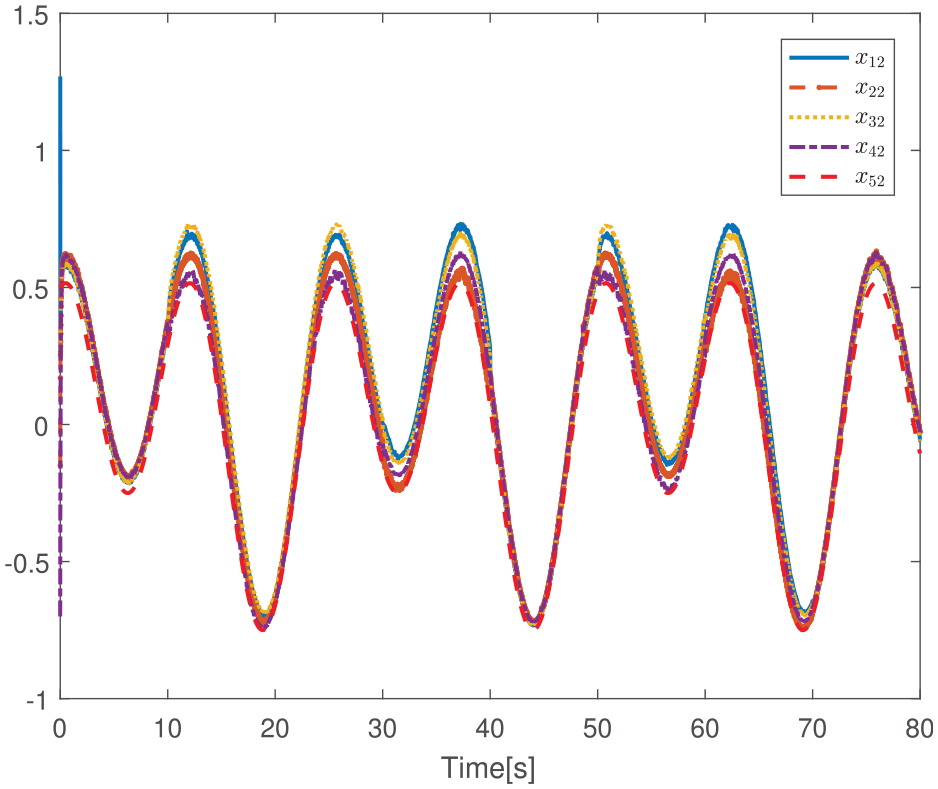
The tracking trajectory of states
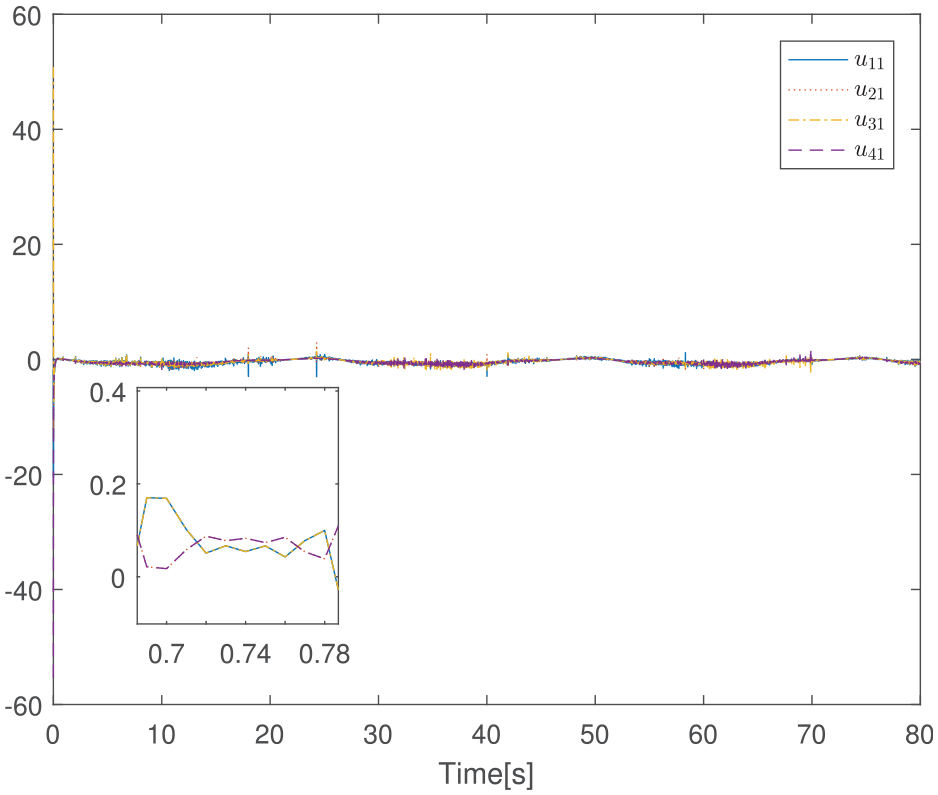
The controller responses of
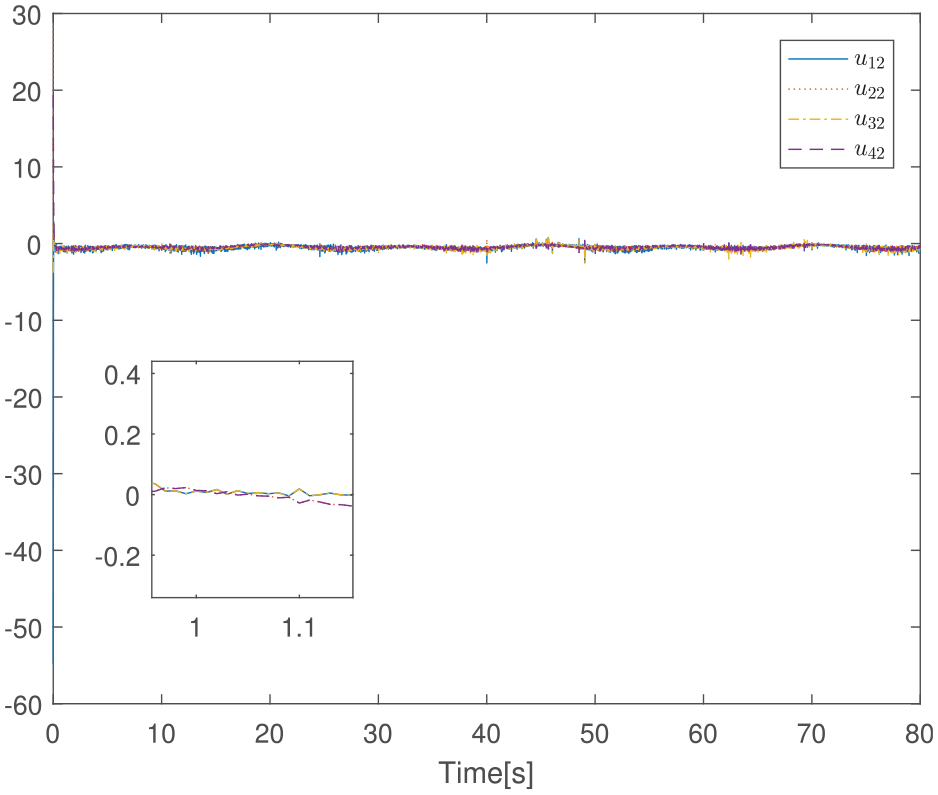
The controller responses of
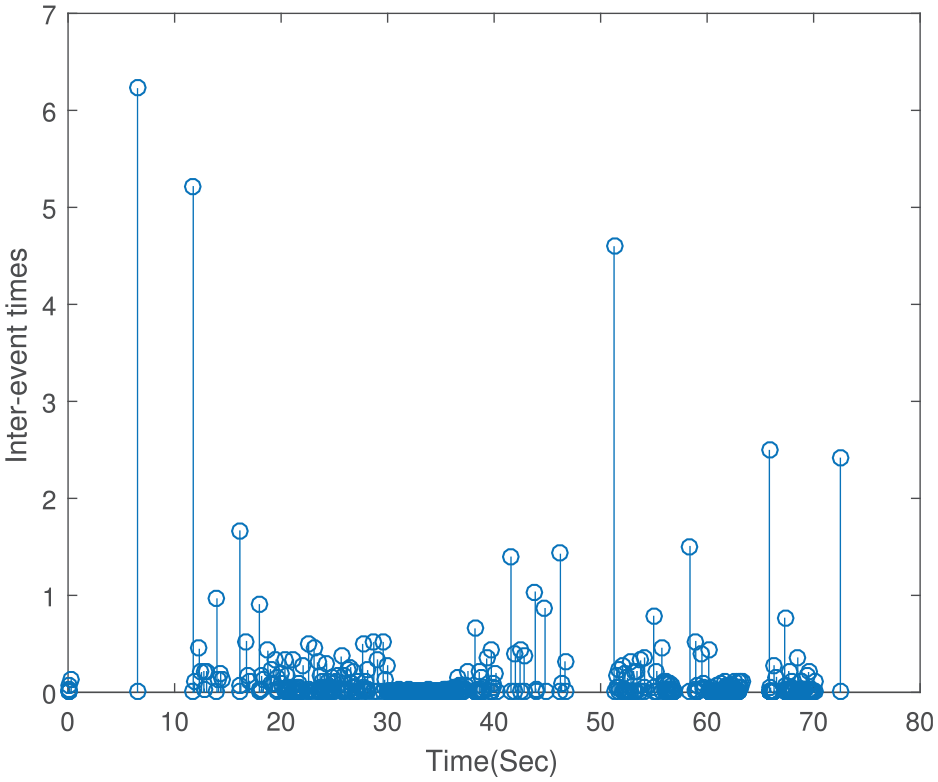
The trigger-time interval of
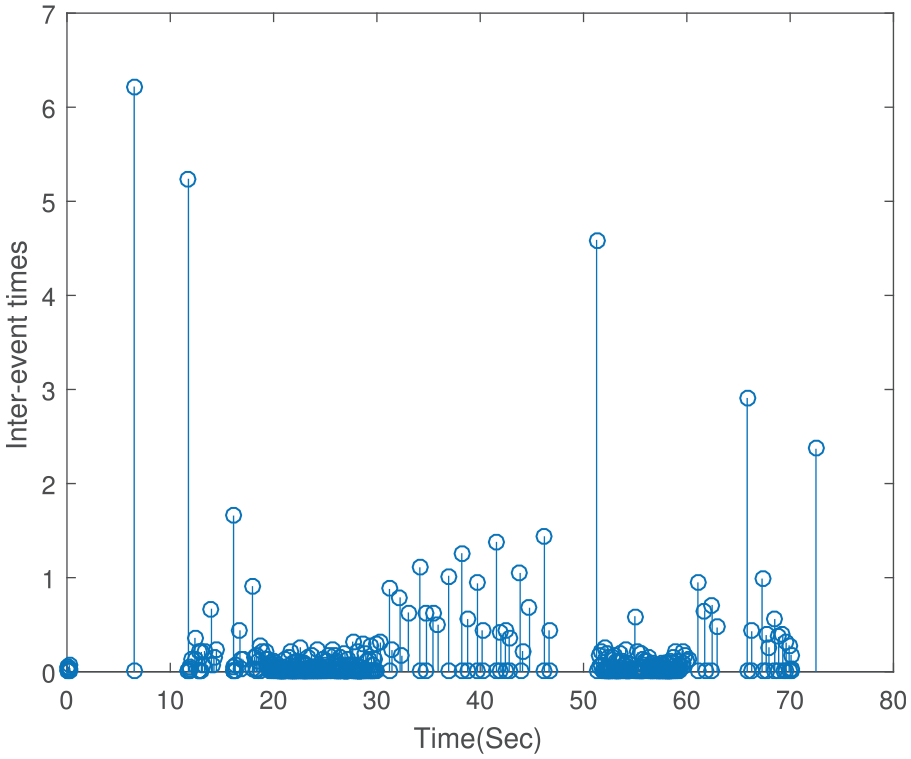
The trigger-time interval of
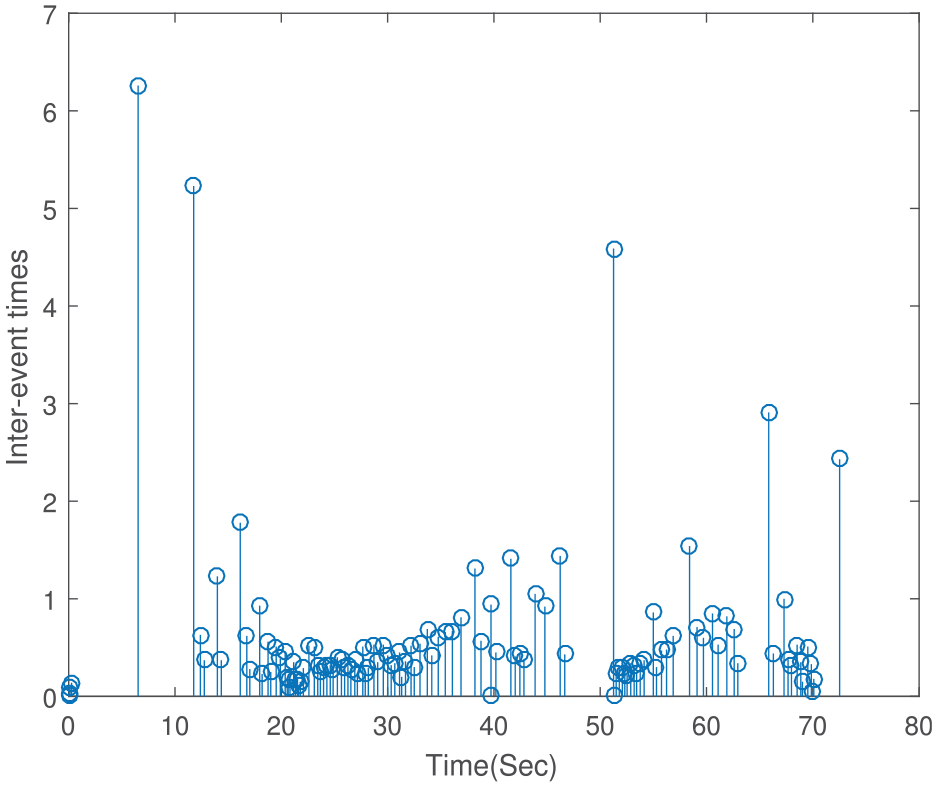
The trigger-time interval of
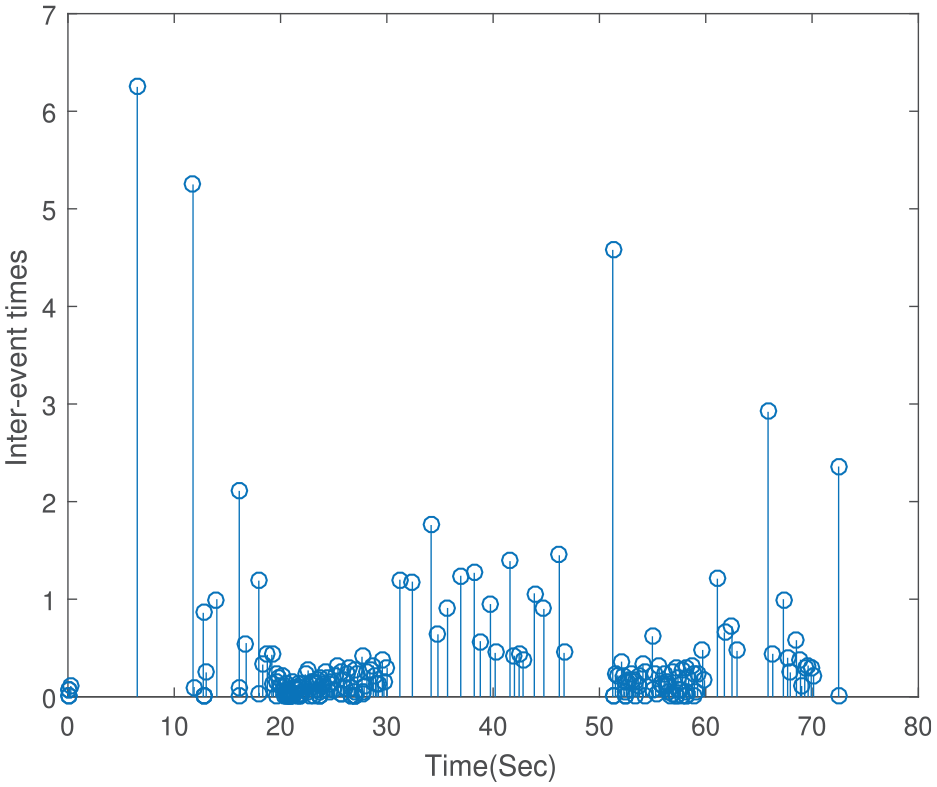
The trigger-time interval of
Conclusion
This paper has studied the distributed event-triggered consensus control problem for a class of MASs with switching topologies. To guarantee that the proposed strategy could be applied to some complex systems, both the nonlinear functions and switching topologies have been simultaneously considered in the presented MASs. A distributed event-triggered mechanism has been proposed, which can reduce the usage of communication resources. Moreover, the Zeno behavior has been avoided for the proposed distributed ETC scheme. With the aid of the Lyapunov inequality theory, the solvable inequality conditions have been derived for the MASs with switching topologies to deal with the consensus tracking issue. The effectiveness and feasibility of the proposed distributed event-triggered consensus control approach have been testified via a numerical example. In future work, how to further improve the ETC scheme to adapt to more complex cases of the MASs is an interesting topic.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under Grants 62222310, 61973131, in part by the Research Fund for the Taishan Scholar Project of Shandong Province of China, and in part by the Fujian Outstanding Youth Science Fund under Grant 2020J06022.