
Abstract
This study explores the problem of finite-time resilient control for periodic piecewise polynomial time-varying systems in the face of parameter uncertainties, time-varying state delays and external disturbances. Particularly, the considered system is characterized by dividing the fundamental period of periodic systems into numerous subintervals, each of which can be expressed by using matrix polynomial functions. The foremost intention of this work is to lay out a resilient controller such that the resulting closed-loop system is finite-time bounded and satisfies a mixed
Keywords
Introduction
In recent times, a great deal of emphasis has been placed on periodic systems due to the periodic nature of many real-world problems such as hypersonic cruise vehicles, mechanical vibrations, electrical circuits and wind turbine systems (Zhou, 2020; Zhou and Huang, 2020; Zhu et al., 2021). Specifically, the majority of control problems in continuous-time periodic systems are difficult to solve because of their time-varying properties compared with their discrete-time counterparts. Since Floquet theory and lifting technique make it easier to analyse discrete-time periodic systems, they lack the ability to do the same for continuous-time periodic systems because their solutions are in closed form. In this context, a limited number of studies have focused on addressing the aforementioned problem by employing approximation methodologies. Consequently, it leads to the development of piecewise methods for reworking continuous-time periodic systems, and as a result, periodic piecewise systems (PPSs) are introduced (Fan et al., 2021; Xie et al., 2019; Zhu et al., 2023). Since then, PPSs have become one of the primary priorities in the scientific community over the past several years (Li et al., 2018; Xie et al., 2021a; Yang et al., 2021). It is important to note, however, that in reality, PPSs are not always linear, so it is more appropriate to describe them in polynomial form, which is intrinsically more precise. Thereupon, the continuous-time periodic systems have been approximated by a number of polynomial subsystems varying over time, yielding periodic piecewise polynomial time-varying systems (PPPTVSs) (Li et al., 2019b). Furthermore, the studies on PPPTVSs have advanced remarkably across scholar communities owing to their inherent potential and relevant literature may be found in the work by Li et al. (2019a) and Xie et al. (2020a, 2021b). Despite their useful features, PPPTVSs have received very little academic attention; this gap in research inspired this study.
Besides, parameter uncertainties exist in several real-world models as an outcome of external interference, modelling errors, communication problems and so on. Under those scenarios, the system may become unstable. Therefore, it is practically vital to take into account the parameter perturbations in the system model. As a result, various articles have been reported on the stabilization problem of diverse dynamical systems with parameter uncertainties (Chen et al., 2022; Feng and Hao, 2021; Liu et al., 2020; Luo and Zhao, 2015; Xie et al., 2018a); however, it should be noted that work on considering the parameter uncertainties in PPPTVSs is in its initial stages. On the contrary, the occurrence of time delays is ineluctable in almost all practical systems, and their presence typically results in adverse dynamic behaviour such as performance degradation, oscillations or perhaps even instability. As a consequence, during the past few decades, one of the most hotly debated concerns in control problems has been the stability analysis for time delay systems (Park et al., 2015; Tan et al., 2018; Xie et al., 2018b; Xie and Lam, 2018). On the contrary, in the realm of PPSs, only a small number of studies have investigated time delays within the system (Xie et al., 2018b; Xie and Lam, 2018). But when the time delay arises in PPPTVSs, the complexity of stability analysis is outdistanced. Therefore, PPPTVSs with time delays have to be addressed, which motivates this study.
Furthermore, it is worthwhile to observe that most controllers have been implemented on the assumption that controller gains can be accurately calculated. However, in many practical situations, a controller operation’s inaccuracy cannot be avoided due to round-off errors of numeric values, parameter drifts, accuracy problems and so on. These factors bring about an inaccurate realization of the implemented controller, and these inaccuracies can be classified as additive and multiplicative gain fluctuations. Due to this fact, it becomes necessary to design a controller that is insensitive to gain variations. As a result, it led to the study of resilient controller characterizations, which has garnered attention from the research community (Liu et al., 2019; Xie et al., 2020a,b; Xiong et al., 2020). For instance, Liu et al. (2019) studied the stabilization problems of delayed PPSs, wherein a resilient controller is developed to handle the sensitivity of gain variations. Nevertheless, the issue of additive and multiplicative gain fluctuations in PPPTVSs remains unreported, serving as the primary impetus for the present investigation. In practice, the plethora of external factors may cause disturbances and have a negative impact on the system’s performance. Furthermore, this kind of disturbance is one of the primary factors in regard to instabilities and performance degradation. To alleviate the effect of disturbances, a mixed
Aside from the foregoing, it should be emphasized that for both the asymptotic and exponential stabilization techniques, to meet the required stability criteria, an infinite time period is needed. However, in real-world situations, the behaviour of the system has to always be analysed in terms of predefined or finite-time (FT) rather than the infinite time frame. At this instant, the FT notion has been deployed, which concentrates on the fast cognizance of the system’s state and also assures that states are in specific limitation over a FT interval. As a result of its practical merits, the exploration of the FT stability notion has piqued significant interest among the scholar community and substantial pieces of literature have been reported. For instance, the FT stability theory has been implemented in neutral systems (Sakthivel et al., 2018), periodic piecewise time-invariant systems (Xie et al., 2017) and nonlinear systems (Wang et al., 2018). Due to these factors, it is of paramount significance to gain insight into the FT stabilization issue for PPPTVSs, which is a topic that has not been done before in the realm of previously published studies.
Prompted by the aforesaid discussions, the FT boundedness problem of PPPTVSs with parameter uncertainties, time-varying delays and external disturbances is examined via resilient control in this article. Moreover, the significant aspects of this work are listed below:
A unifying framework integrating the FT scheme, time-varying delays, parameter uncertainties and external disturbances is postulated for the stabilization of PPPTVSs.
Predominantly, a periodic piecewise polynomial time-varying controller is conjured up for the intent of procuring FT boundedness. Furthermore, a mixed
Moreover, both additive and multiplicative gain perturbations are factored into the controller design to increase the resiliency of the controller.
Specifically, by blending periodic piecewise polynomial Lyapunov–Krasovskii functional (LKF) and FT stability theory, an adequate delay-dependent criterion is acquired under the frame of linear matrix inequalities (LMIs), which ascertains the system’s stability in a FT with an endorsed disturbance attenuation index.
Subsequently, the requisite resilient control gain matrix can be computed by solving the derived LMI based criteria. Ultimately, a simulation study is conducted to exemplify the efficacy and viability of the theoretical discoveries.
Problem formulation
In this portion, uncertain periodic systems are modelled with external disturbances and time-varying delays, which can be characterized by the following ordinary differential equations
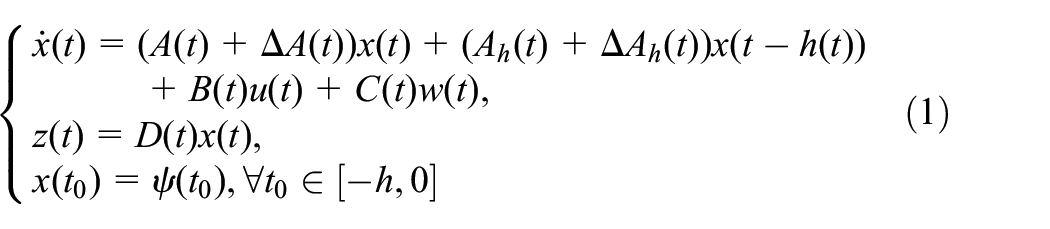
where
Here, the continuous-time periodic system (equation (1)) can be reconstructed as PPPTVSs by using piecewise approximation strategy. To be specific, each time segment within the fundamental period
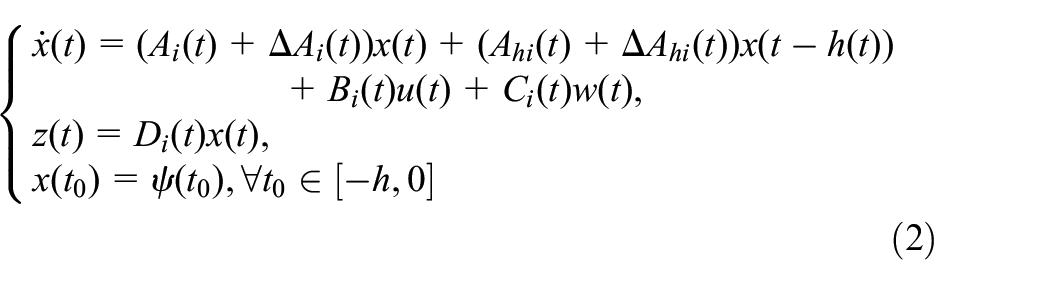
where
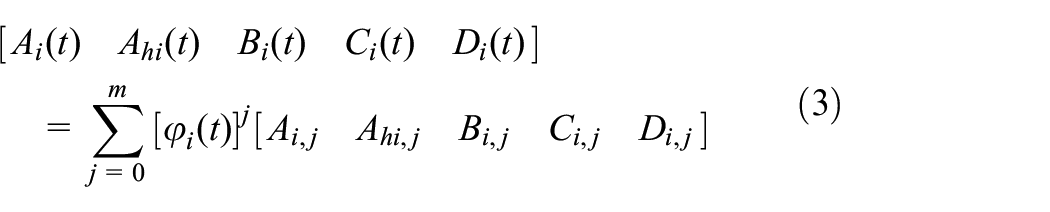
here
Moreover, in some cases, the gain matrices are extremely susceptible to their own inevitable variations or perturbations, resulting in undesirable behaviours in the system. So, it is important to consider the fragility of the gain matrix to achieve better performance. In light of this, the following resilient state feedback controller is devised

where
Norm-bounded fluctuations in the additive form

Norm-bounded fluctuations in the multiplicative form

Here,
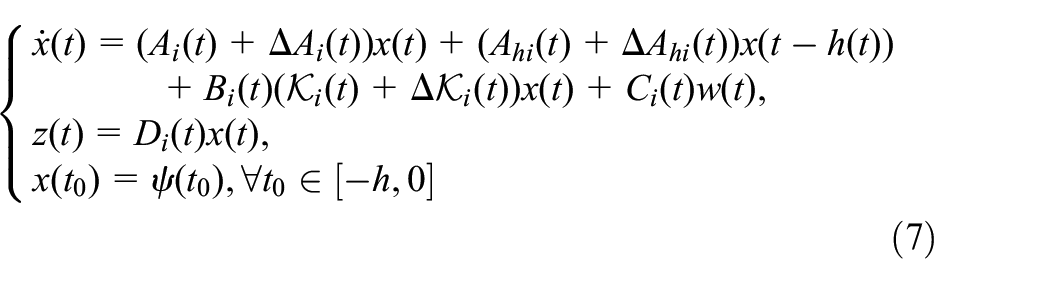
Then, we obtain the subsequent closed-loop system by fusing the devised controller (equation (4)) in the PPPTVSs (equation (2))
Before proceeding to the next section, the following assumption, definitions and lemmas are presented, which are indispensable to procure the desired results.


for all
Main results
The principal objective of this part is to draft a solution to the FT boundedness problem proffered in the former section. Precisely, the notions of FT stability theory and Lyapunov stability theory, along with Wirtinger’s inequality, are deployed to confirm the FT boundedness of the assayed system. First, the FT boundedness criteria are derived in Theorem 1 utilizing known controller gain matrix and additive gain perturbations. Next, based on the defined constraints, the design approach of the resilient control gain matrix is given in Theorem 2, where the controller gains are considered as unknown. Conclusively, by following the foregoing results, the pertinent stability criteria in the face of multiplicative gain perturbations are given in Theorem 3.
Before heading on to the theorem aspect, the periodic piecewise positive definite matrix

for
FT boundedness analysis
In what follows, the befitting criteria in the frame of LMIs affirming the FT boundedness of PPPTVSs are formulated in the below theorem.


where
Now, by reckoning the time-derivative of LKF, we obtain
Next, by employing Lemmas 1 and 2, the single and double integral portions in the preceding equation can be recast as


where
Subsequently, by merging the relations (equations (12)–(14)), we acquire the below expression

where
Furthermore, by applying the Schur complement lemma and S procedure to

Now, by integrating the former inequality (equation (16)) from


By assuming the criteria

On a related note, from equation (11), we have
Furthermore, from equations (17)–(19), we can easily get

Thus, if the criterion (equation (10)) is met, it is easy to manifest that
Mixed
and passivity-based FT resilient controller design
Following the preceding subsection, we present a sequel theorem demonstrating the FT boundedness of the PPPTVS by taking mixed



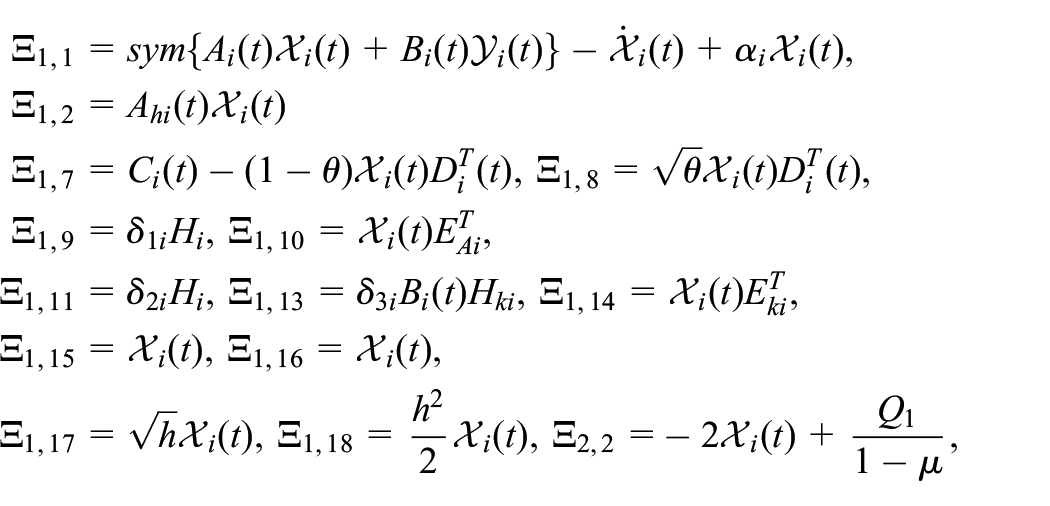
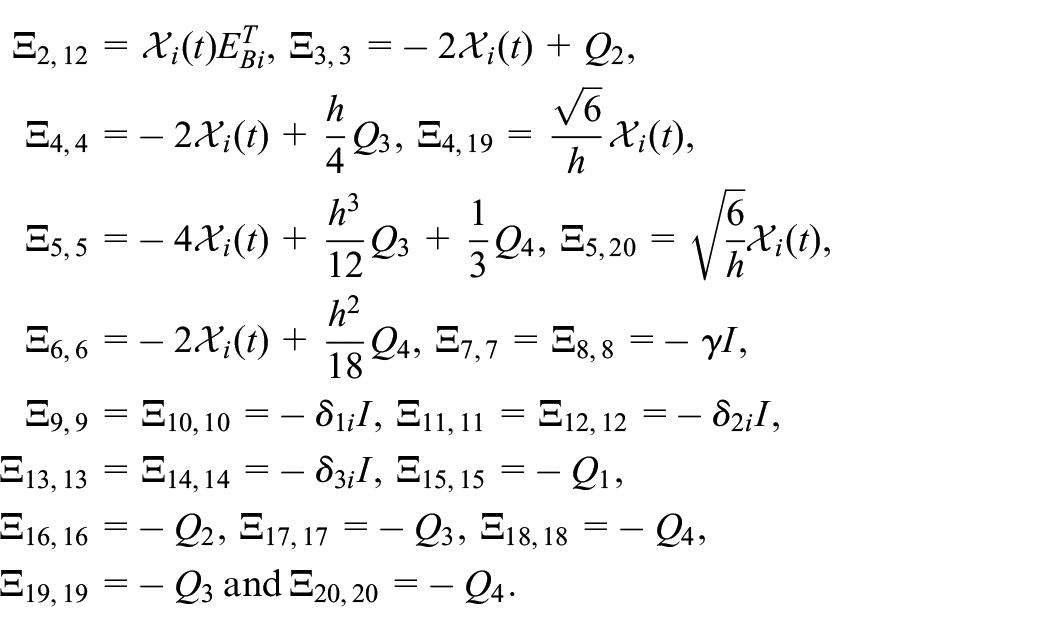
where the elements of
The entries
The elements corresponding to
The entries of
Furthermore, through the following connection, time-varying gain matrices can be calculated for a resilient state feedback controller

here
Subsequently, pre- and post-multiply the resultant matrix by
Moreover, the aforementioned matrix

where
On the contrary, by notating
Following the foregoing results, in this theorem, adequate conditions proving the addressed system to be FTB in the face of multiplicative gain perturbations are offered.

where the element of matrix
Validation of methodology
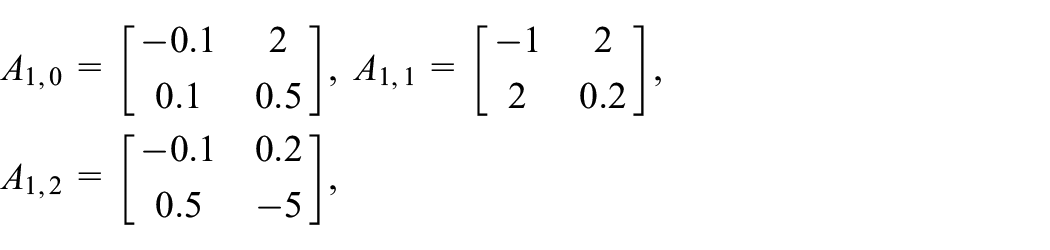
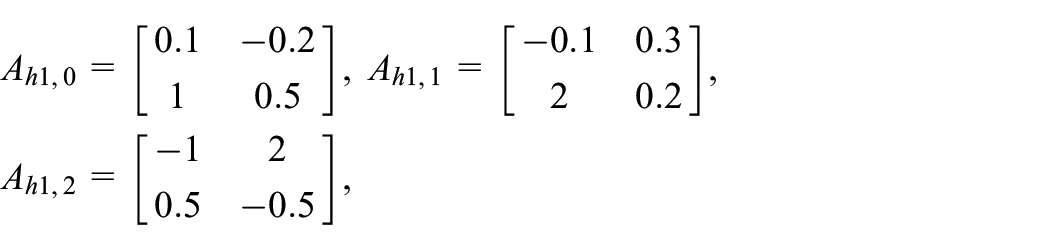
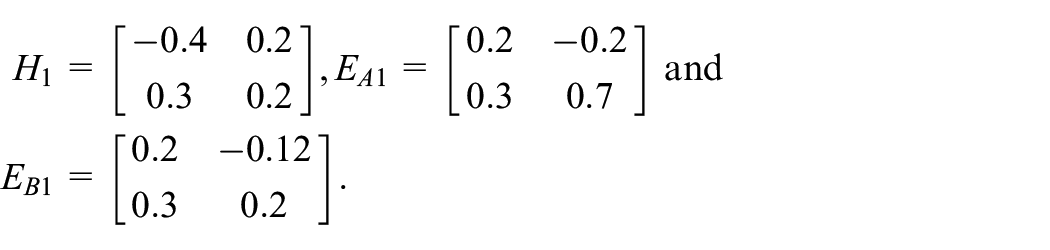
In this segment, we present a numerical example and its simulation to validate and demonstrate the importance of the analytical conclusions in the preceding section. For the sake of conciseness, we consider PPPTVSs (equation (2)) with two degrees and three subsystems. Furthermore, for
Subsystem 1:



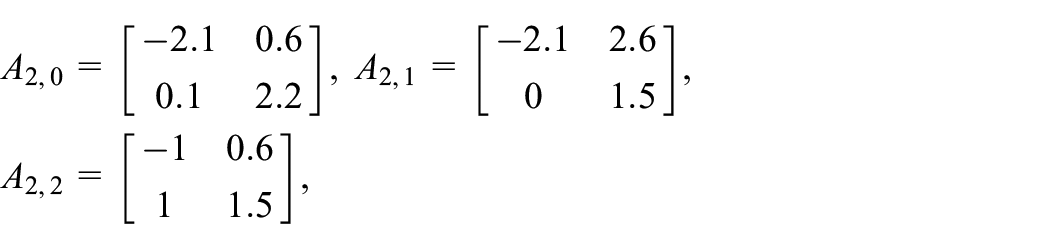
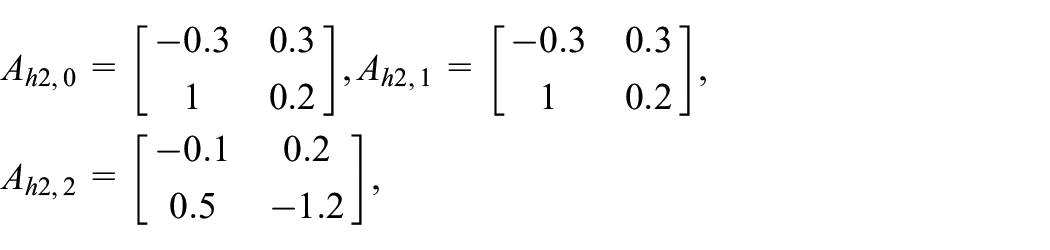
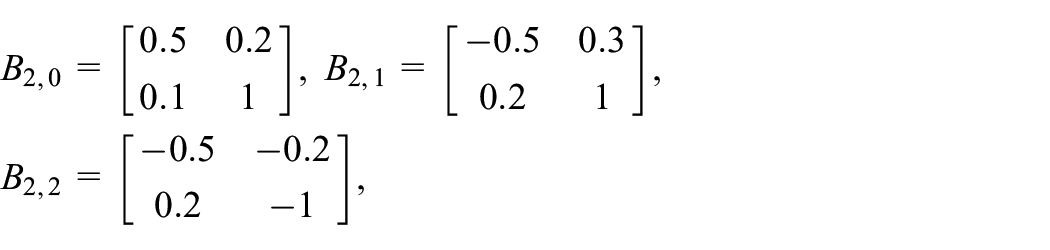
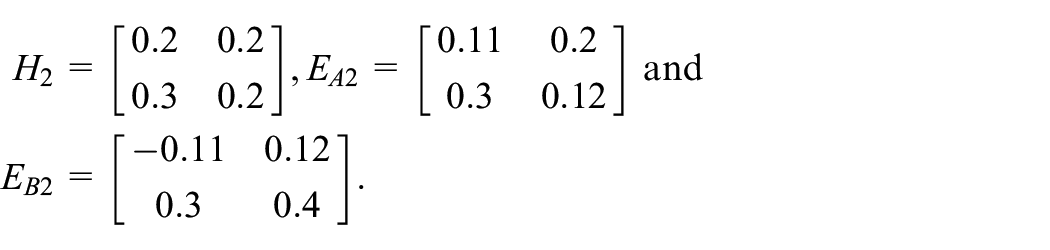
Subsystem 2:


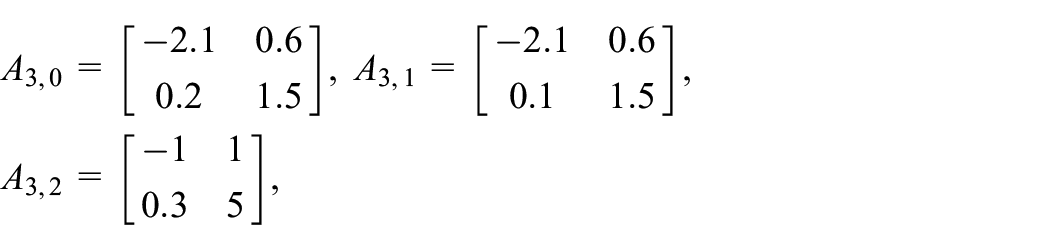
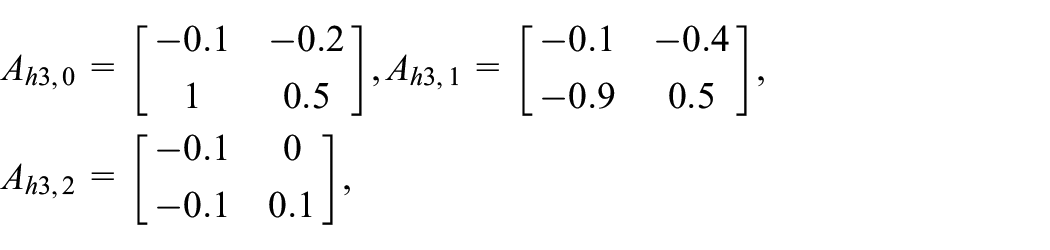
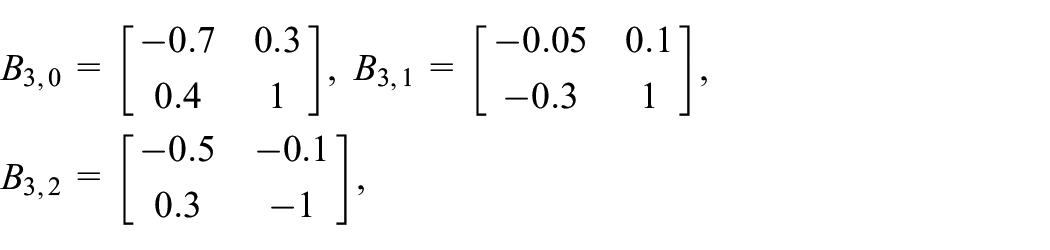
Subsystem 3:


Moreover, along with the aforementioned parameters, to conduct a feasible test, the time-varying state delay is considered as
Case 1: Additive fluctuations:
Case 2: Multiplicative fluctuations:
Following this, by substituting the above-mentioned parameters in the conditions (equations (20)–(22)) and through the medium of the LMI toolbox in MATLAB, the feasible solutions are computed with the disturbance attenuation index
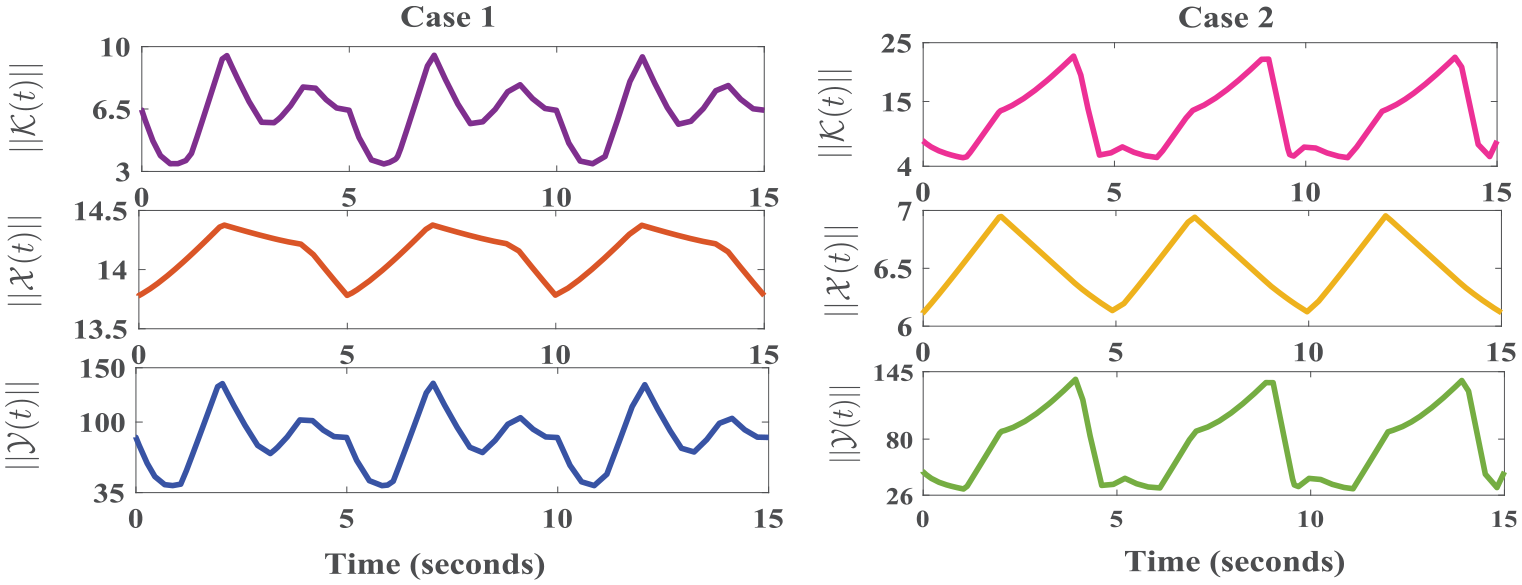
Variation of norm for
For the simulation purposes, hereunder, we opted the external disturbance signal and initial condition, respectively, as

By the stand of prior settings, the simulation is carried out with the help of the MATLAB Simulink programme, and the graphs are provided in Figures 2–8. Specifically, in Figure 2, the state trajectory under the developed controller is offered, in which the assayed system’s convergence rate is slower for Case 2 than for Case 1. Furthermore, Figure 3 illustrates the state responses of PPPTVS without designating a controller, and it can be clearly seen that state trajectories fail to converge. Hence, it is evident from Figures 2 and 3 that the developed resilient control protocol is effective in stabilizing the considered system, even though time delays, parameter uncertainties, external disturbances, additive and multiplicative gain fluctuations occur in the assayed system. Furthermore, the response of state trajectories under both cases of perturbations for various delay bounds is illustrated in Figure 4. It is apparent from this figure that the presence of a time delay has a substantial amount of influence on the stability of the addressed system; that is, when the scale of the time delay is increased, the convergence rate of the undertaken system is slower. From this figure, the impact of time delays on the system under discussion is abundantly evident. In addition, designed controller responses under additive and multiplicative perturbations are showcased in Figure 5.
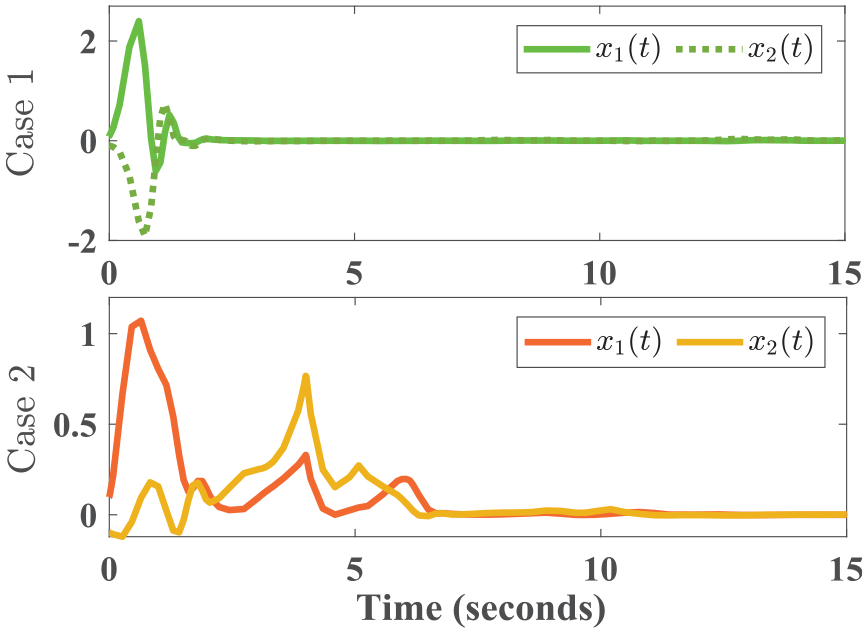
Evolution of closed-loop trajectories.
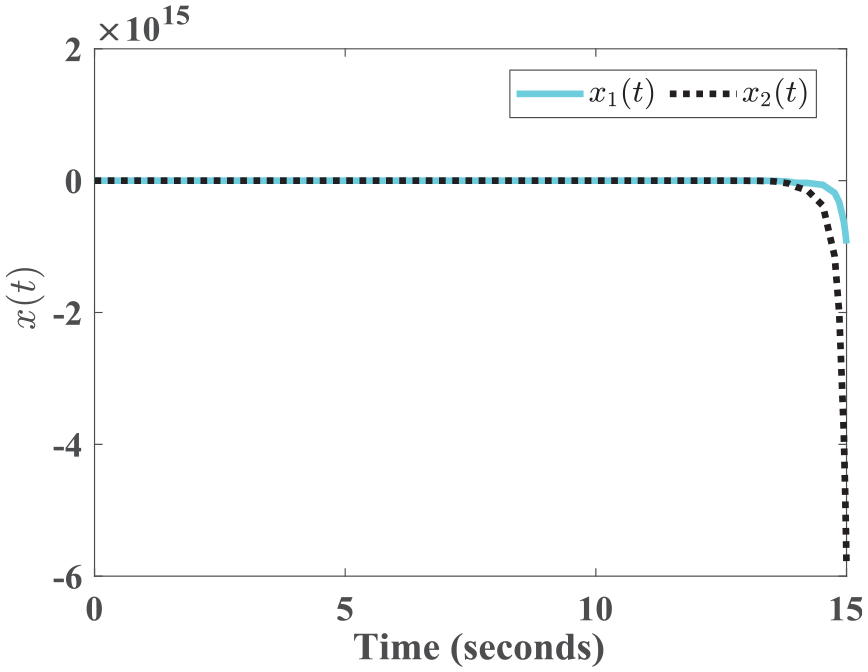
Evolution of open-loop trajectories.
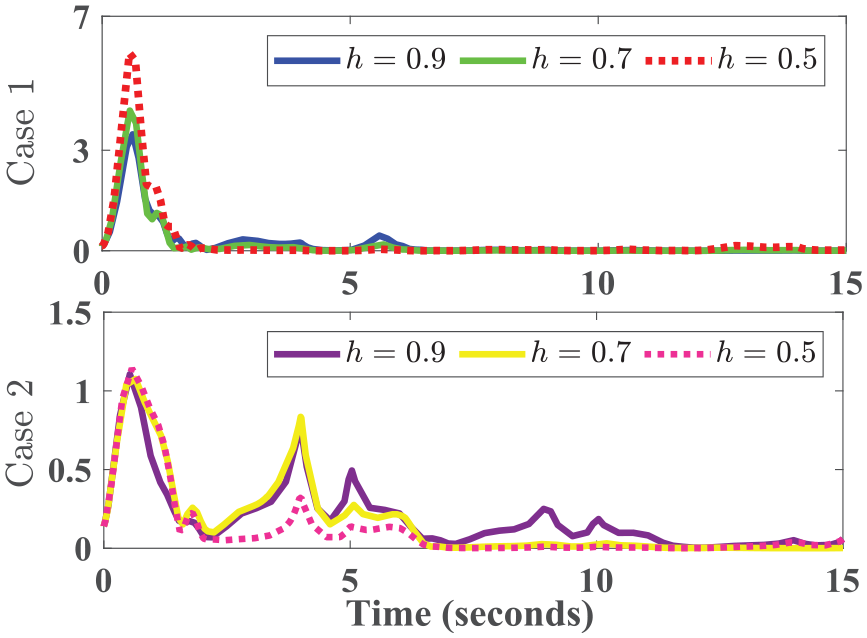
State responses of PPPTVSs under distinct delay bounds.
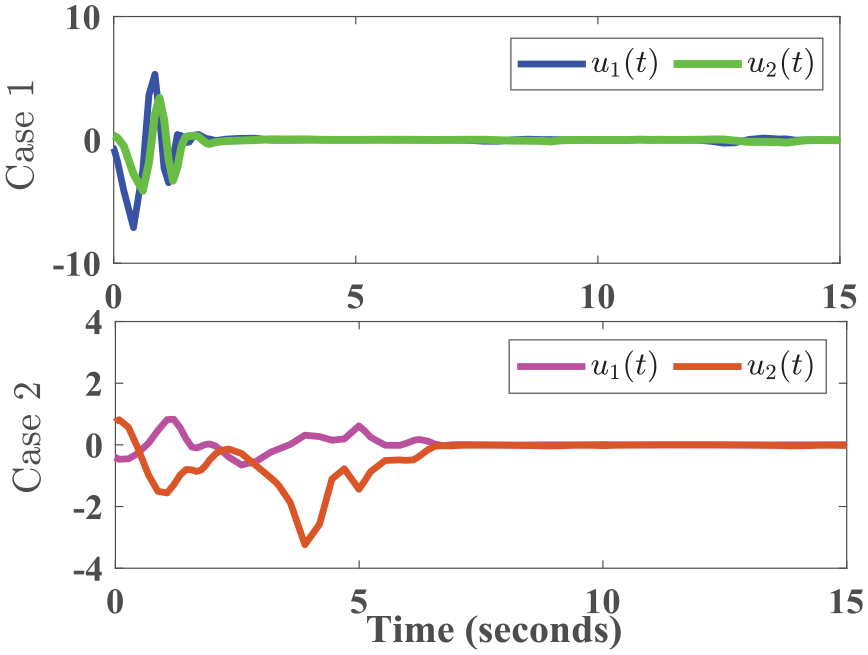
Control responses for two cases.
Time history of
Evolution of output trajectories: (a) Case 1 and (b) Case 2.
Evolution of
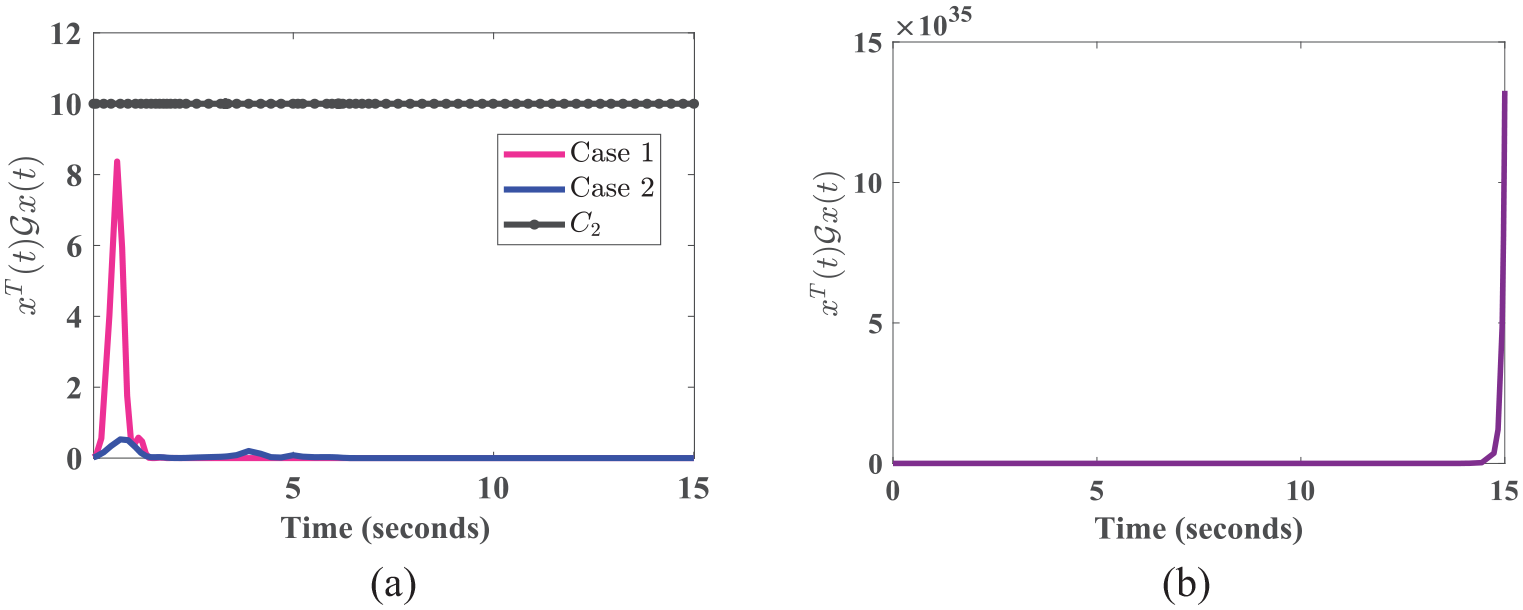
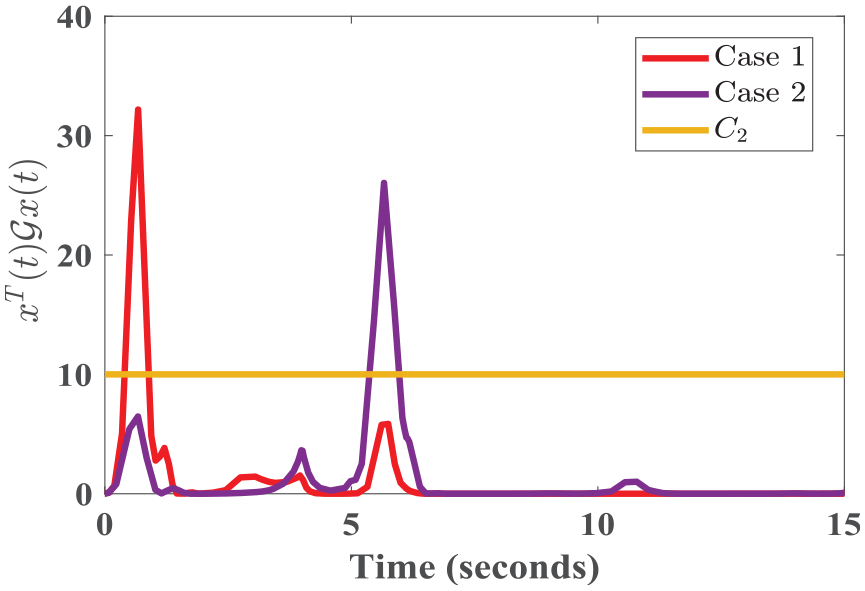
Furthermore, in Figure 6, the time evolution of
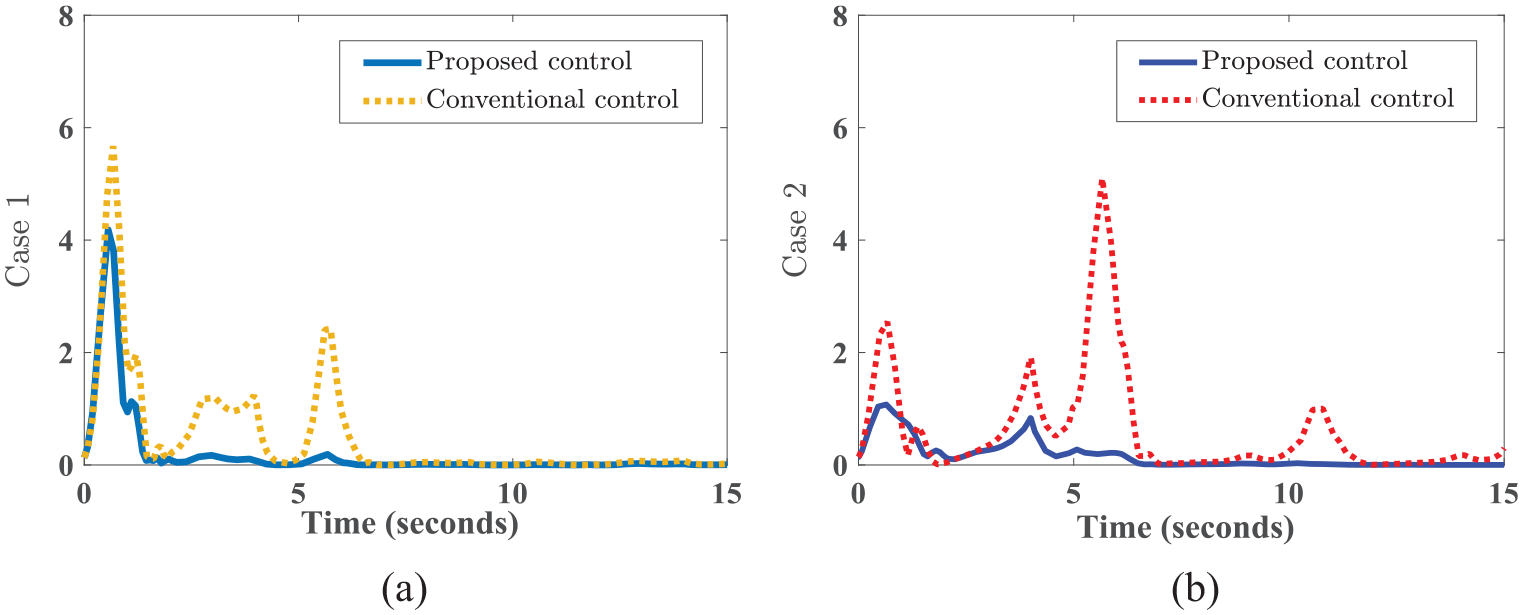
Eventually, the response of system output has been supplied in Figure 7 to show off the potential benefits of the proposed resilient control in comparison with the traditional controller. The outcomes indicate that the designed controller delivers far better performance for the system than the conventional controller. Furthermore, the response of
As such, the simulation results presented above clearly show that the devised control design is resilient against gain fluctuations and ensures the FT boundedness of the investigated system despite the time-varying delays in the state, uncertainties and exogenous disruptions.
Conclusion
In this investigation, a FT stabilization problem has been addressed for a class of PPPTVSs in the existence of unpredictable factors such as time-varying state delay, parameter uncertainties and external disturbances by utilizing the resilient control scheme. More precisely, additive and multiplicative gain fluctuations have been scrutinized making the control more appropriate for practical scenarios and it is rendered by periodic piecewise characteristics. By exploiting LKF methodology along with FT stability notion and matrix polynomial lemma, a set of adequate constraints has been established to assure the FT boundedness of the considered system. Furthermore, relying on the established settings, a precise relation for reckoning the desired periodic piecewise time-varying resilient control gain matrix has been presented. Finally, a numerical analysis was carried out in which the intrinsic potential of the derived theoretical conclusions was confirmed using simulations.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work of R Sakthivel was financially supported by Science and Engineering Research Board (SERB), Department of Science and Technology (DST) and Government of India under Core Research Grant (CRG), Sanction No. CRG/2020/002844.
Data availability statement
Data sharing is not applicable to this article as no data sets were generated or analysed during this study.