
Abstract
This paper proposes a novel model-based event-triggered control (MB-ETC) strategy for nonlinear networked delta operator systems subject to deception-type cyber-attacks. The approach uniquely integrates MB-ETC with the delta operator framework—marking the first such integration for nonlinear systems operating under cyber threats. The method leverages a two-layer neural network (NN)-based nonlinear controller, which outperforms traditional single-layer radial basis function (RBF) networks by eliminating dependence on predefined basis functions and enhancing approximation capability. Control signals and NN weights are updated only when a carefully designed event-triggering condition is violated, significantly reducing communication load and conserving network resources. The controller also adapts dynamically to variations in system model dynamics across triggering intervals. To avoid Zeno behavior, a strictly positive lower bound on inter-event time is analytically derived. Simulation results validate the proposed method’s effectiveness and superiority in maintaining system stability under attack conditions while optimizing resource usage.
Keywords
Introduction
Networked control systems (NCSs) are systems where a control loop operates over a communication network, often shared with other systems (Mahmoud, 2016; Zhang et al., 2023). These systems provide several advantages, such as enhanced reliability, reduced installation, and maintenance costs, and flexible scalability. A common approach for implementing control in NCSs is sampled-data control (SDC), where signals are periodically sensed, actuated, and control actions executed at fixed time intervals. However, SDC often leads to inefficient use of limited network resources, including computational power, energy, and bandwidth (Aarzen, 1999). To address this inefficiency, two alternative methods have been proposed in the literature: event-triggered control (ETC) (Aarzen, 1999) and model-based control (Montestruque and Antsaklis, 2002).
In event-triggered control (ETC), data are transmitted aperiodically, only when the defined event-triggering condition is violated. This approach reduces the frequency of transmissions, leading to more efficient use of network resources. Extensive research has been conducted on regulating NCSs through ETC methods (see Mahmoud and Sabih (2014), Peng and Li (2018), and references therein). Conventional ETC continuously monitors the event-triggering condition, which may result in excessively fast sampling, potentially causing Zeno behavior (Tabuada, 2007). To address this issue, Heemels et al. (2013) proposed a periodic ETC approach, where the event-triggering condition is checked at regular time intervals. Yue et al. (2013) extended ETC to NCSs with time delays, while Bansal et al. (2018) introduced a periodic ETC for systems experiencing actuator faults. In Kumari et al. (2019), a delta operator approach was utilized to unify continuous-time systems (CTS) and discrete-time systems (DTS), resulting in the development of an event-triggered sliding mode controller. Similarly, Yuan and Liu (2021) designed an event-triggered fault detection strategy for NCSs under time-varying delays using the delta operator approach. Despite its advantages, ETC often employs a zero-order hold (ZOH) mechanism, which maintains a constant control signal between two triggering instants (Wang and Lemmon, 2011). This ZOH-based ETC operates in an open-loop fashion during these intervals, potentially compromising performance. To overcome this limitation, the model-based networked control system (MB-NCS) technique has been proposed (Montestruque and Antsaklis, 2002, 2003). In MB-NCS, the controller leverages a plant model to compute the control law and predict the system’s state between sampling instants. Using this estimated state, a control signal that offers better performance than ZOH while consuming fewer network resources is generated.
To combine the advantages of both ETC and MB-NCS, a model-based ETC (MB-ETC) technique has been developed in the literature (Garcia and Antsaklis, 2013; Heemels and Donkers, 2013; Liu et al., 2020; Song et al., 2022; Zhang et al., 2016). In MB-ETC, a plant model is used to estimate system dynamics, enabling aperiodic transmissions and updates based on an event-triggering condition. To further optimize network resource usage, the control law is adapted based on the plant model’s state between successive event-triggering instants. Heemels and Donkers (2013) introduced an MB-ETC method for perturbed linear systems, while Garcia and Antsaklis (2013) proposed an MB-ETC approach for systems with quantization and time-varying delays. Zhang et al. (2016) developed an adaptive MB-ETC framework for systems subject to external disturbances, and Song et al. (2022) designed a sliding-mode control strategy using MB-ETC for uncertain systems with external disturbances. For uncertain linear systems, Liu et al. (2020) proposed an MB-ETC approach featuring a dynamic event-triggering condition. However, these studies primarily address systems with well-understood dynamics (Heemels and Donkers, 2013; Zhang et al., 2016) or systems with limited uncertainty (Garcia and Antsaklis, 2013; Liu et al., 2020; Song et al., 2022). Accurately modeling the dynamics of real-world systems is often challenging, making it essential to develop control strategies that effectively handle systems with unknown or highly uncertain dynamics.
Neural network (NN)-based ETC techniques have gained prominence for systems with entirely unknown dynamics (Hu et al., 2018; Sahoo et al., 2013, 2016). Sahoo et al. (2013, 2016) developed NN-based ETC for single-input single-output (SISO) and multi-input multi-output (MIMO) nonlinear systems with uncertain dynamics, respectively. However, both studies employed a zero-order hold (ZOH)-based ETC approach. To address some limitations of ZOH-based methods, Chen et al. (2021) proposed an NN model-based ETC (NN MB-ETC) for nonlinear CTS. This approach utilized a single-layer NN controller with a radial basis function (RBF). While effective, the RBF design requires preselecting activation functions that correspond to a basis set of smooth nonlinear functions. This dependency can be mitigated by adopting a multi-layer NN design, which eliminates the need for basis set preselection and offers greater flexibility in handling complex nonlinear systems. Furthermore, a three-layer NN controller optimized via genetic algorithms and linear matrix inequalities is designed by Chen et al. (2025). It addresses external disturbances and network-induced time delays and implements a dynamic event-triggered scheme to reduce communication load. However, the ETC proposed in this paper is a ZOH-based ETC.
The utilization of networks for information sharing introduces the significant challenge of cyber-attacks, which can compromise the security of NCSs, degrade performance, or even lead to a complete system shutdown (De Sá et al., 2017). Consequently, it is critical to investigate and analyze the effects of cyber-attacks on the stability of nonlinear NCSs. Recent research has increasingly focused on addressing various types of cyber-attacks, including replay attacks, deception attacks, and denial-of-service (DoS) attacks, in the context of NCSs (De Sá et al., 2017). For instance, Dolk et al. (2017) proposed an event-triggered strategy to mitigate the effects of DoS attacks, while Wang et al. (2022) developed an ETC technique specifically for nonlinear systems subjected to jamming attacks. Liu et al. (2019) introduced an event-triggering approach for systems with distributed sensors under stochastic deception attacks. Similarly, Liu et al. (2018) proposed a hybrid triggering method for nonlinear NCSs vulnerable to deception attacks by combining time-triggering and event-triggering strategies. In addition, Wu et al. (2021) presented a novel ETC framework for NCSs under deception attacks, incorporating two distinct triggering conditions. Further contributions include Gu et al. (2021), who developed a unique event-triggering approach for nonlinear systems under deception attacks using T-S fuzzy approach, and Bansal and Mukhija (2020), who proposed a hybrid triggering approach combining self-triggering and ETC strategies for systems facing deception attacks. To address DoS attacks, Zhao et al. (2022) introduced a model-based dynamic ETC approach for system control, while Wang et al. (2023) designed a dynamic ETC framework for nonlinear systems affected by both DoS and deception attacks, employing an interval type-2 T-S fuzzy model. In addition, Wu et al. (2024) proposed a hybrid system approach combining periodic ETC and dynamic periodic ETC for controlling nonlinear systems under DoS attacks. Although the literature offers extensive findings on ETC strategies for networked systems prone to cyber-attacks, the majority of these studies focus on linear systems (Bansal and Mukhija, 2020; Dolk et al., 2017; Liu et al., 2019; Wu et al., 2021; Zhao et al., 2022). For nonlinear systems, researchers frequently use T-S fuzzy approximations to examine the impact of attacks (Gu et al., 2021; Liu et al., 2018; Wang et al., 2023). An adaptive NN control strategy ensuring CTS stability in the presence of unknown deception attacks on both actuators and sensors is developed by Li et al. (2024). The approach combines backstepping, funnel functions, and a ZOH-based event-triggering mechanism. A model-free control strategy using Goal representation Heuristic Dynamic Programming to handle sparse actuator attacks in discrete-time nonlinear systems is developed in Song et al. (2025). An ZOH-based event-triggered mechanism is designed to optimize control updates. However, to the best of authors’ knowledge, the impact of cyber-attacks on the networked systems with unknown nonlinear dynamics using model-based ETC (MB-ETC) for conserving network resources has not yet been explored.
Motivated by the preceding discussion, this paper introduces an MB-ETC technique for developing a NN-based controller for networked systems with unknown nonlinear dynamics, susceptible to disturbances and cyber-attacks. Prior works such as Liu et al. (2020) and Gu et al. (2021) contributed greatly to event-triggered control upon uncertain systems. Liu et al. (2020), however, focused on linear systems with known limited uncertainty and does not address cyber-attacks or nonlinear dynamics. Attacks are now considered, and T–S fuzzy approximation is employed by Gu et al. (2021), but then adaptive learning capability is lacking because pre-designed fuzzy rule bases are relied on. In contrast, our approach integrates a two-layer NN regarding online approximation as it targets a more general class for nonlinear systems including unknown dynamics. A probabilistic cyber-attack model accompanying the MB-ETC is proposed. This inclusion enables strong, efficient control in adversarial conditions and fills a critical gap that existing literature does not address. The primary focus of this paper is on deception-type cyber-attacks, which can corrupt transmitted data and thereby manipulate the controller’s actions, degrading system performance over time. A deception-type cyber-attack either happens at the moment when an event-triggered update is scheduled, or it occurs in between triggering events. If the attack occurs at an event-triggered time, the transmitted signal may get compromise. To handle this, a probabilistic model is used to represent the likelihood of an attack encoded as a Bernoulli random variable in this paper. Furthermore, instead of relying completely on the corrupted information, the controller uses a model-based prediction of the system’s state to compute the control action. In this way, even if the received data is compromised, the system can fall back on its internal prediction to maintain stability. On the other hand, if the attack happens between two event-triggered updates, it has almost no impact on the controller. This is due to the fact that during these periods, no new data is exchanged, and the controller does not rely on external input. It continues to operate using its internal model of the plant to estimate the system’s behaviour and apply the necessary control. Since there’s no communication, there’s nothing for the attacker to corrupt in that moment. Thus, by combining model-based predictions with event-triggering updates and updating only when necessary, the attack gets limited automatically thereby ensuring that the system remains stable, even under repeated or unpredictable attacks. The probability of such attacks is modeled as a random variable. To estimate the unknown nonlinearities, a two-layer NN is employed. This use of a two-layer NN marks a significant innovation over prior work that relied on single-layer RBF networks, by eliminating the need for predefined basis functions and offering greater flexibility in approximating complex dynamics. Furthermore, RBF NNs often need many neurons in case of complex nonlinearity while the two-layer NNs (with sigmoid activation) can approximate a broader class of functions with fewer neurons. The proposed MB-ETC technique integrates a model-based plant with the aperiodic transmission property of ETC to estimate the system’s actual states. Both NN weights and system states are updated only when a triggering condition is violated, thereby conserving network bandwidth, computational resources, and energy. Since in ZOH-ETC, the controller relies on the recently received state and maintains it constant until the next transmission occurs, this may lead to performance degradation if the system dynamics change significantly between two consecutive updates. However, in the MB-ETC approach, the plant model’s dynamic changes are used to compute the control law between two consecutive triggering events, thereby, maintaining accurate operation without requiring frequent updates. As a result, using MB-ETC instead of ZOH-based ETC, the consumption of network resources is significantly reduced. Furthermore, this work achieves a notable first by integrating the MB-ETC framework with the delta operator for nonlinear systems under cyber-attacks, allowing a unified treatment of both continuous-time (CTS) and discrete-time (DTS) dynamics. To prevent Zeno behavior, a positive lower bound on the minimum inter-event time (MIET) is derived. Simulation results are presented to validate the effectiveness of the proposed approach in maintaining system performance under both attacks and disturbances.
The main contributions of this paper are summarized as follows:
To effectively use network resources and control nonlinear systems under deception attack and disturbances, an MB-ETC strategy is proposed.
The proposed MB-ETC approach is developed for both CTS as well as DTS that are unified using delta operator approach, a key advancement that enables consistent design and analysis across time domains.
A two-layer NN is employed to approximate the unknown nonlinear dynamics within the system eliminating the dependency on predefined basis functions typically required in single-layer RBF networks.
A lower bound on MIET is obtained, which helps prevent Zeno behavior in a system.
Sections “Stability analysis” and “Simulation results” further explore several special cases of the proposed MB-ETC strategy, providing detailed analysis for nonlinear NCS.
The structure of the paper is as follows: section “Problem formulation” discusses the preliminaries, problem formulation, and system description. The stability analysis of the proposed approach is presented in section “Stability analysis.” The derivation of the condition on the minimum inter-event time (MIET) is provided in section “Minimum inter-event time.” Simulation results and a comparison of the proposed approach with other control strategies are discussed in section “Simulation results.” Finally, section “Conclusion” provides the conclusion.
Notations: The Frobenius norm of a matrix Z is defined as
Problem formulation
The nonlinear NCS under consideration is susceptible to disturbances and cyber-attacks. In Figure 1, a block diagram illustrating the proposed control approach is shown. At the sensor end, a communication network is present for data transmission, as seen in Figure 1. Combining ETC and MB-NCS for a nonlinear NCS under cyber-attack results in the proposed MB-ETC strategy. In the proposed control strategy, ETC is utilized for aperiodic transmission of signal and thereby, updates at the sensor end. A model-based technique is utilized to compute the control input during two adjacent trigger instants and approximate the behavior of the system in order to significantly reduce the number of transmissions compared to the ZOH ETC. Furthermore, the unknown dynamics are approximated using NN. The NN weights are updated, and the system state is transmitted to the model only when an event is triggered based on the specified triggering condition. The stochastic deception attacks could happen to the NCS. Deception attacks may alter the data that is transmitted, changing the control action and progressively decreasing the system’s efficiency. Because of its architecture, the suggested approach can be used for both CTS and DTS. While the CTS is useful for theoretical analysis, the DTS is suitable for computer realization. Consequently, the outcomes of CTS and DTS are combined using a delta operator (Goodwin et al., 1986).
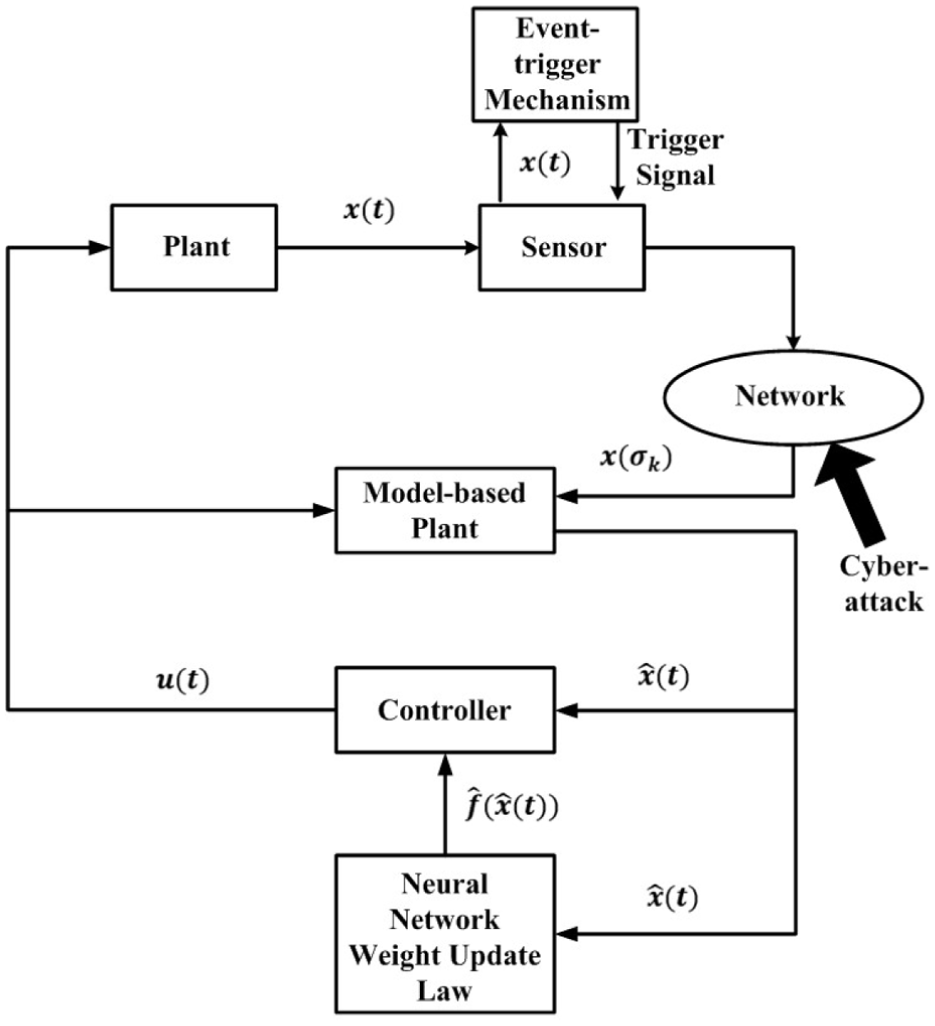
Block diagram of the MB-ETC strategy.
System description
Considering a nonlinear system whose dynamics are described by
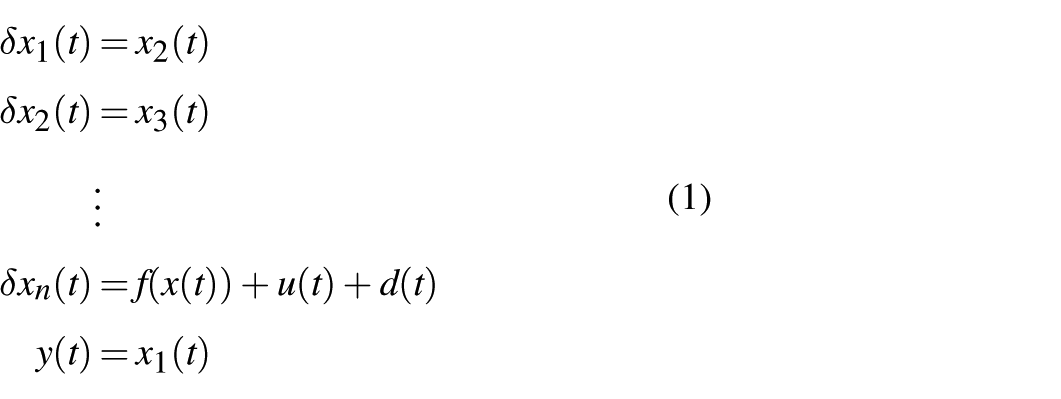
where
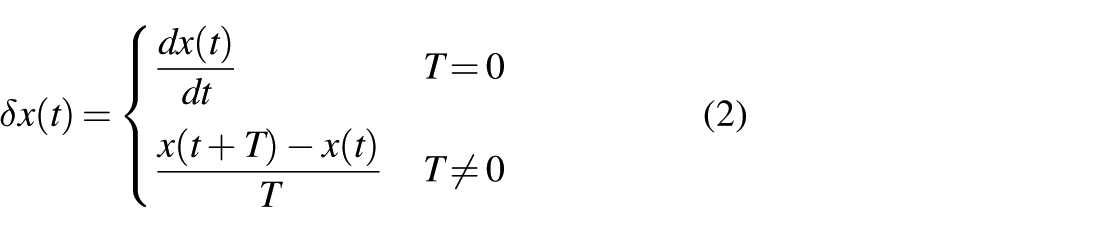
where T is the sampling period.
The following assumption relates to the unknown disturbance affecting the system.
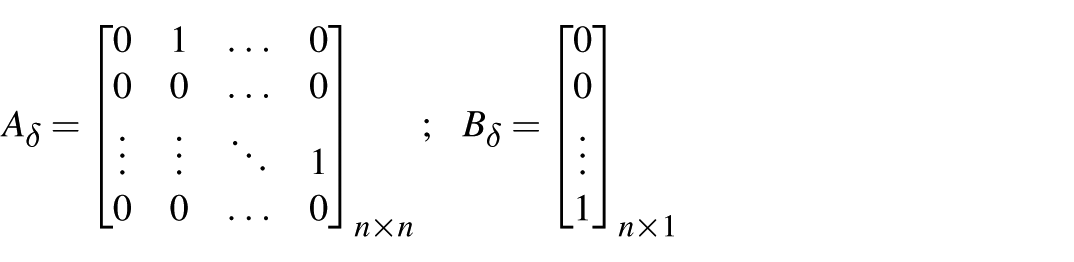
The nonlinear system (1) can be expressed in the Brunovsky canonical form (BCF)

where
The system

The ideal control law for a system experiencing a deception attack and disturbances can be designed using the feedback linearization approach as

where the attack on the system is denoted by

where H is a known constant matrix (Liu et al., 2019).
It is not possible to directly apply the ideal control law (5) as the nonlinearity
Neural network approximation
The unknown smooth nonlinear function is approximated via a two-layer NN structure. Figure 2 illustrates the output of the two-layer NN, which is used to approximate the function

where ϵ is the approximation error,

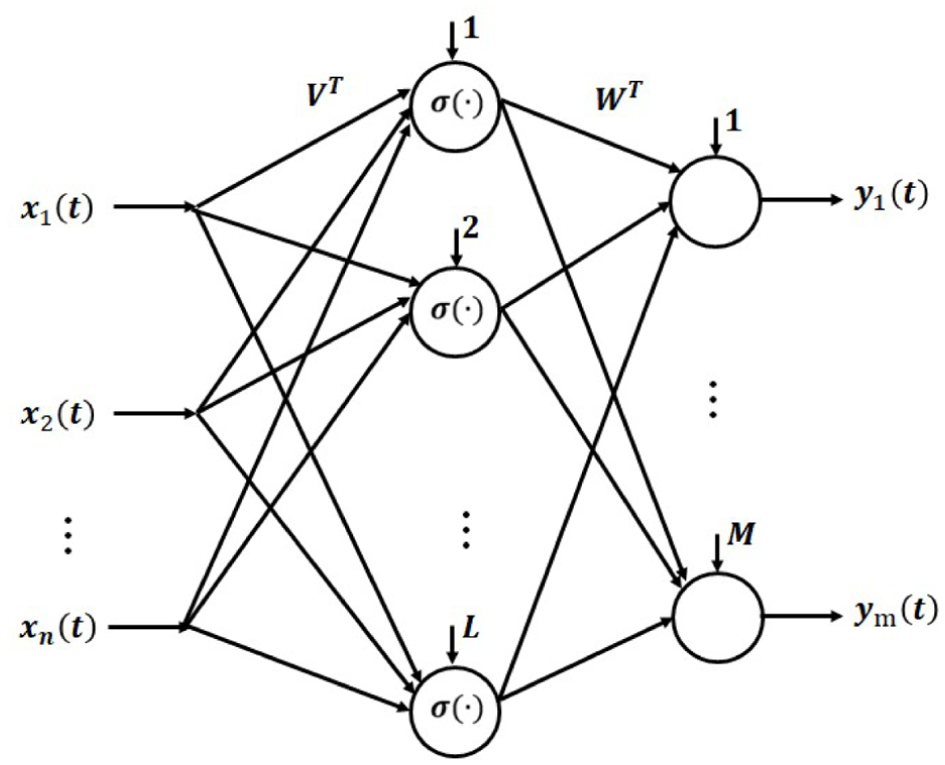
Neural network structure.
Considering that the ideal weight matrices V and W are unknown, they cannot be directly used for controller design. Therefore, their estimates,

The following assumptions are drawn regarding the weight matrices and the activation function.


where
Model-based design
The model-based plant for the nonlinear system (1) is designed as follows

where
In the proposed MB-ETC approach, the event-triggering instants

For aperiodic state transmission, the following event-triggering condition is considered

where
In the following subsection, an actual controller is developed for nonlinear NCS under cyber-attacks of the deception kind.
Controller design
Since,

The approximation of the nonlinear function at estimated state is given by

The suggested approach updates the NN weights only when an event is triggered on violation of the condition (14). As a result, the weight update laws for NN during the flow interval as well as jump instants are as follows.
For the flow interval

And at the aperiodic jump instants (triggering instants)

given matrices M and N of appropriate dimensions, the updated NN weights upon an event trigger are denoted as
Using equations (9), (17) and (18), the dynamics of the neural network weight estimation error are derived as follows.
For flow interval

And at jump instants

The next section presents the development of stability conditions for the closed-loop system using the proposed MB-ETC strategy.
Stability analysis
The following theorem establishes the stability conditions for equation (1) under a deception attack using the proposed MB-ETC strategy.
For flow interval
At triggering instants

where
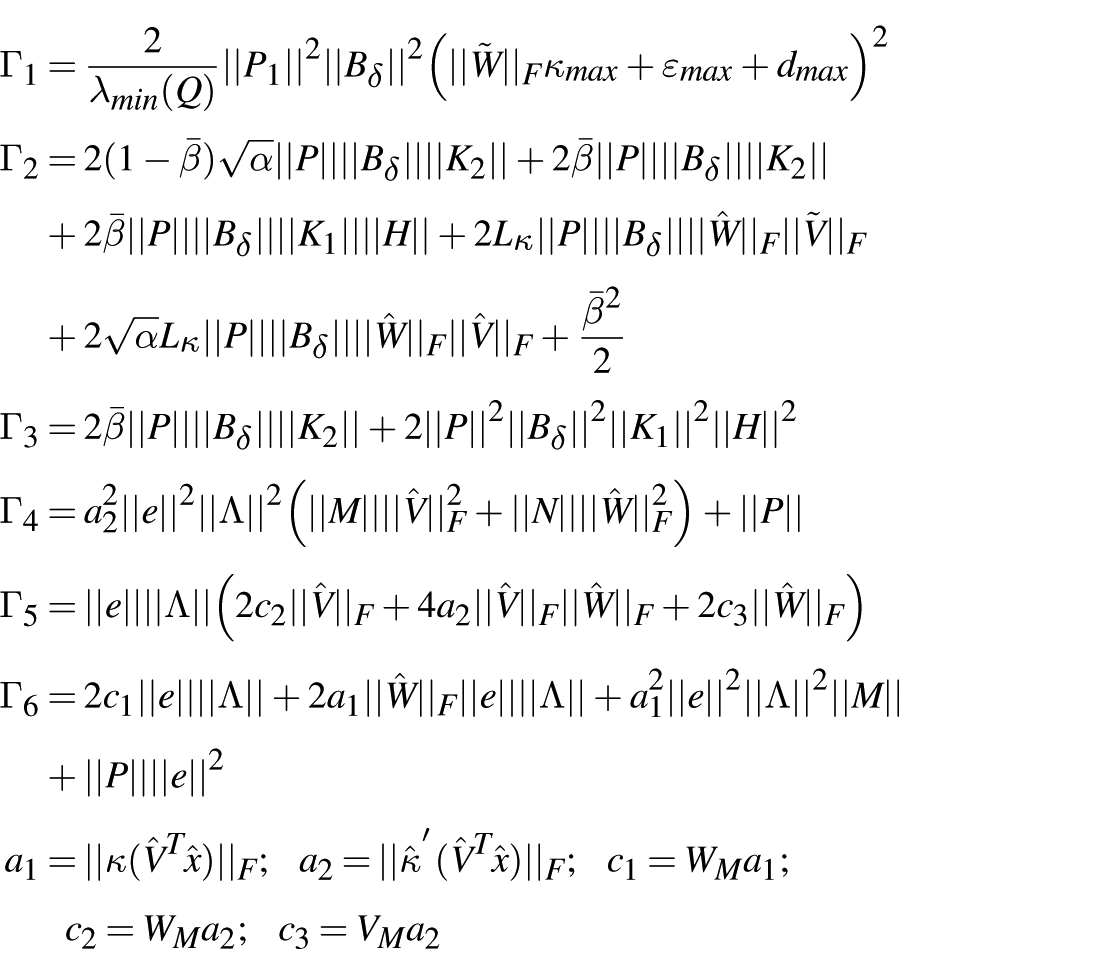

where
For Flow interval:
From equation (19), using the infinitesimal operator (Bansal and Mukhija, 2020) on

Furthermore, using infinitesimal operator (Bansal and Mukhija, 2020) on

From equations (1), (5), and (15), the flow dynamics of the nonlinear system are given by
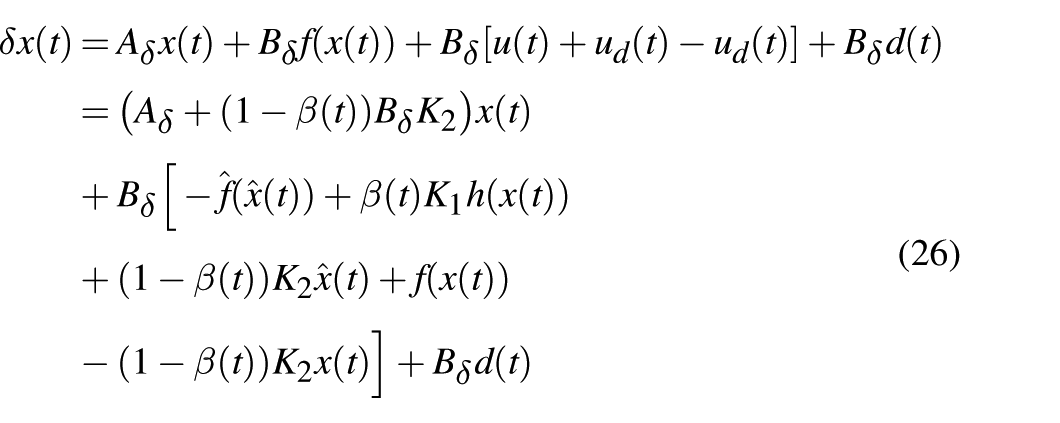
From equations (7), (9), (13), and (16), equation (26) can be rewritten as
Similarly, from equations (12) and (15), dynamics of the plant model is expressed as

On utilizing equations (24), (25), (27), and (28), the expectation on the Lyapunov function (23) yields
On using equation (4) along with Assumptions 1, 2, 4, and 5 and taking Frobenius norm, equation (29) becomes
Using triggering condition (14) and Young’s inequality leads to the following expression

Thus,
At triggering instants:
Taking into account the aperiodic triggering instances, the Lyapunov function’s (23) first difference is given by

At jump instants

Hence,

Utilizing equation (33) and taking norm, equation (34) becomes

From equation (20),
Let

In addition, taking the Frobenius norm of equation (36) and using (37) gives

Similarly, from equation (20),

Let

On taking Frobenius norm of equation (39) and utilizing (40), the following is obtained

Combining equations (35), (38) and (41), (32) is rewritten as

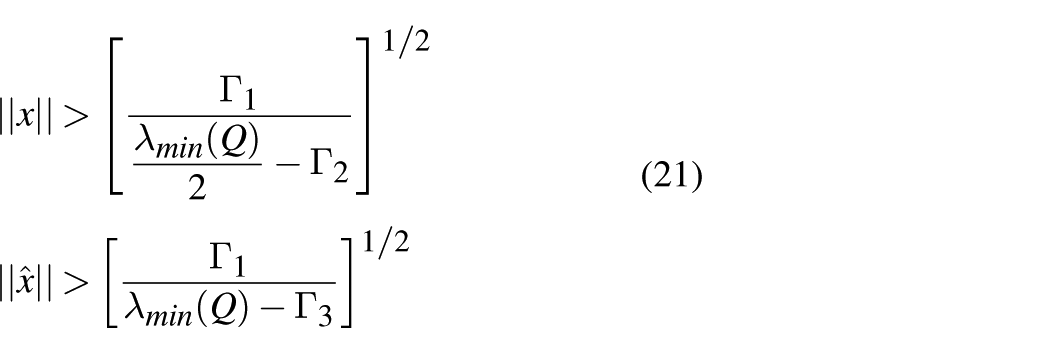
From equation (42),

The condition (22) is derived by completing the squares.
Furthermore, for system dynamics (1) without deception attack, the desired and actual control law become

The plant model, NN weight update laws, and event-triggering conditions remain the same and are represented by equations (12), (17), (18), and (14), respectively.
For flow interval
At triggering instants

where
Minimum inter-event time
In this section, a condition establishing a lower bound on the inter-event time is derived and presented in Theorem 2 to prevent Zeno phenomena in CTS.

where


On utilizing equations (27) and (28), equation (47) becomes

Reorganizing the terms in equation (48) results in

On employing Comparison lemma (Khalil, 2000) considering the initial condition

On solving equation (50) for
Simulation results
This section presents simulation examples that validate the effectiveness of the suggested MB-ETC control strategy.
Example 1: As a representation of a CTS, consider an inverted pendulum, whose system dynamics are as follows

From equation (2), since

assuming
System under deception attack (Example 1): (a) system state and estimated state, (b) NN weights
Transmission instants for Example 1: (a) transmission instants for the proposed MB-ETC strategy (Theorem 1), (b) transmission instants using ZOH-ETC strategy, (c) transmission instants for the feedback-linearized system using the ETC strategy, and (d) transmission instants using T-S Fuzzy based ETC strategy.
Comparative analysis of different control strategies for
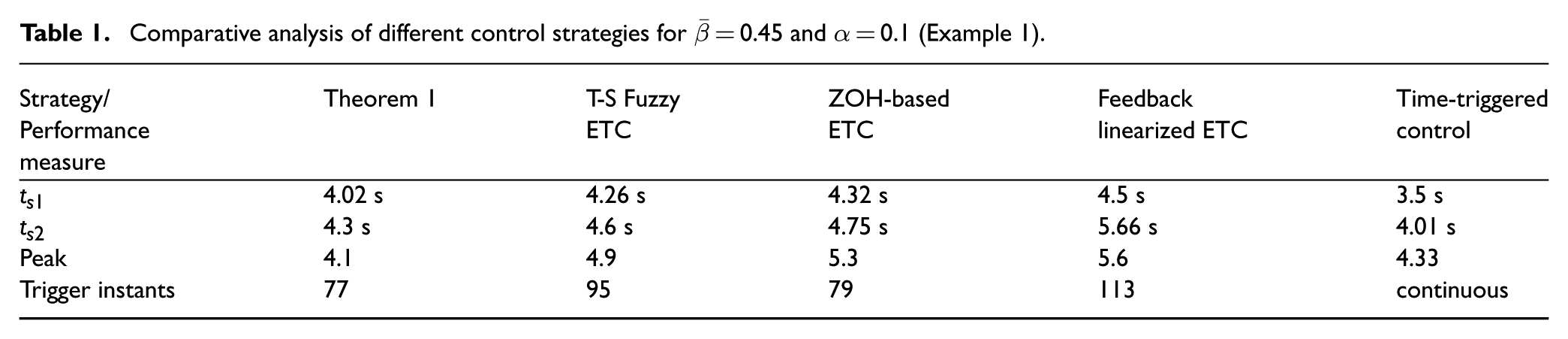
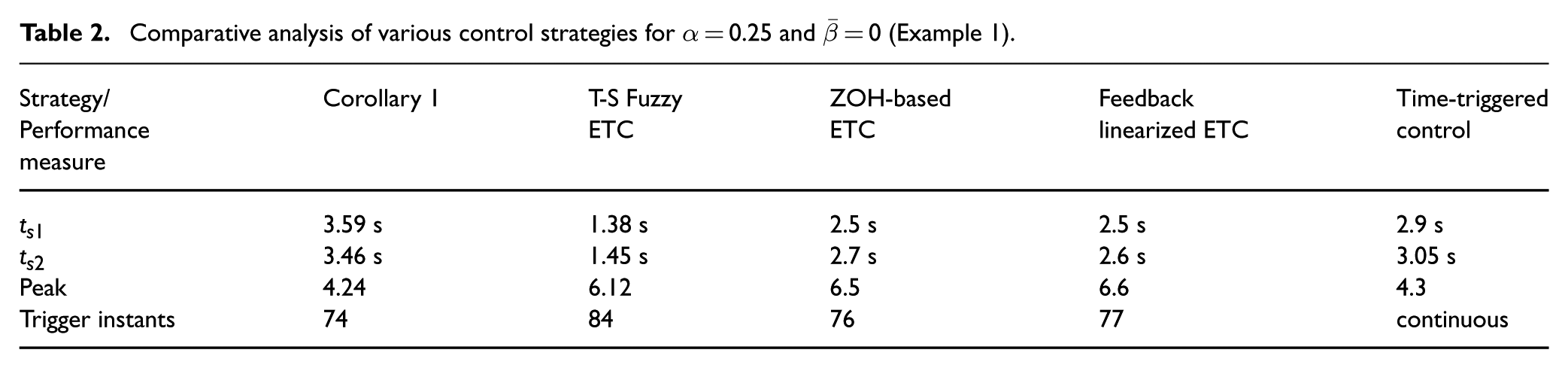
Furthermore, Table 2 presents a comparison of the suggested control strategy with various control strategies for a system without attack in the presence of disturbances.
Comparative analysis of various control strategies for
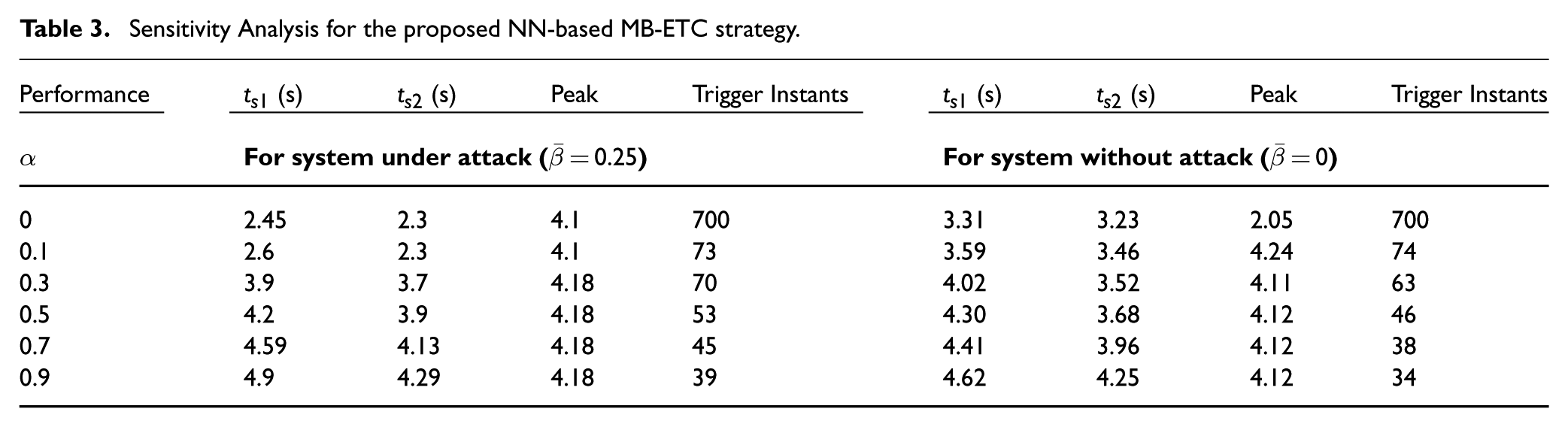
Sensitivity Analysis for the proposed NN-based MB-ETC strategy.
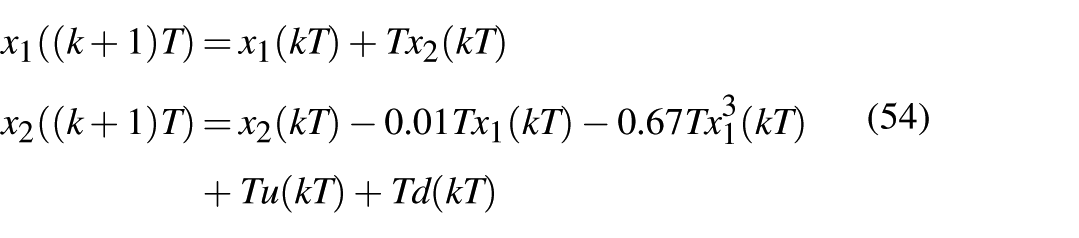
Example 2: Considering the nonlinear mass spring DTS wherein the dynamics of the system are explained as follows

From equation (2) the DTS (53) can be rewritten as
In the example above, the number of NN nodes is chosen to be 12. The attack’s probability of occurrence is estimated to be
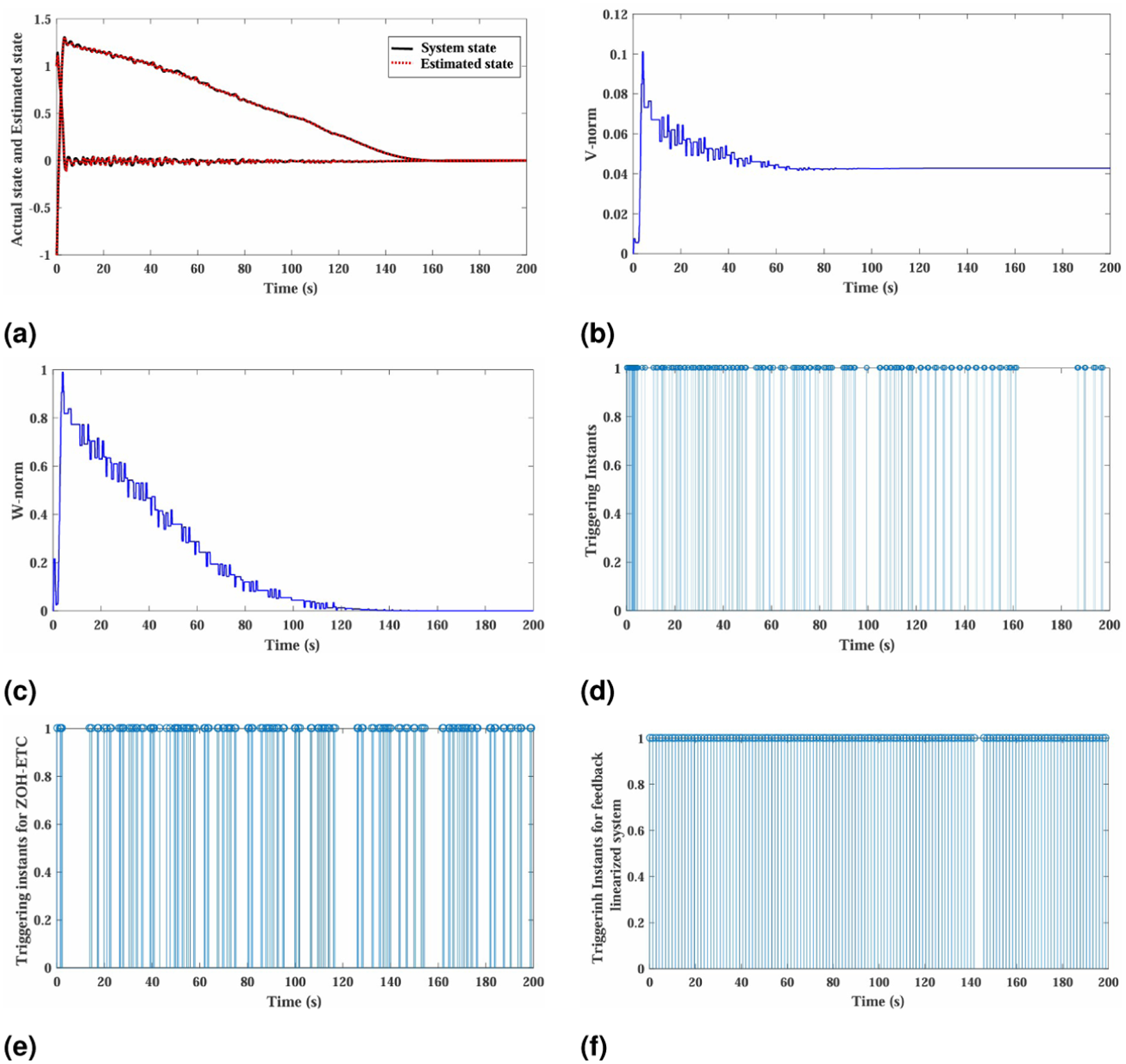
Example 2 under deception attack: (a) system state and estimated state, (b) NN weight
Comparative analysis of various control strategies for Example 2 with

In addition, Example 2 is also examined without an attack (
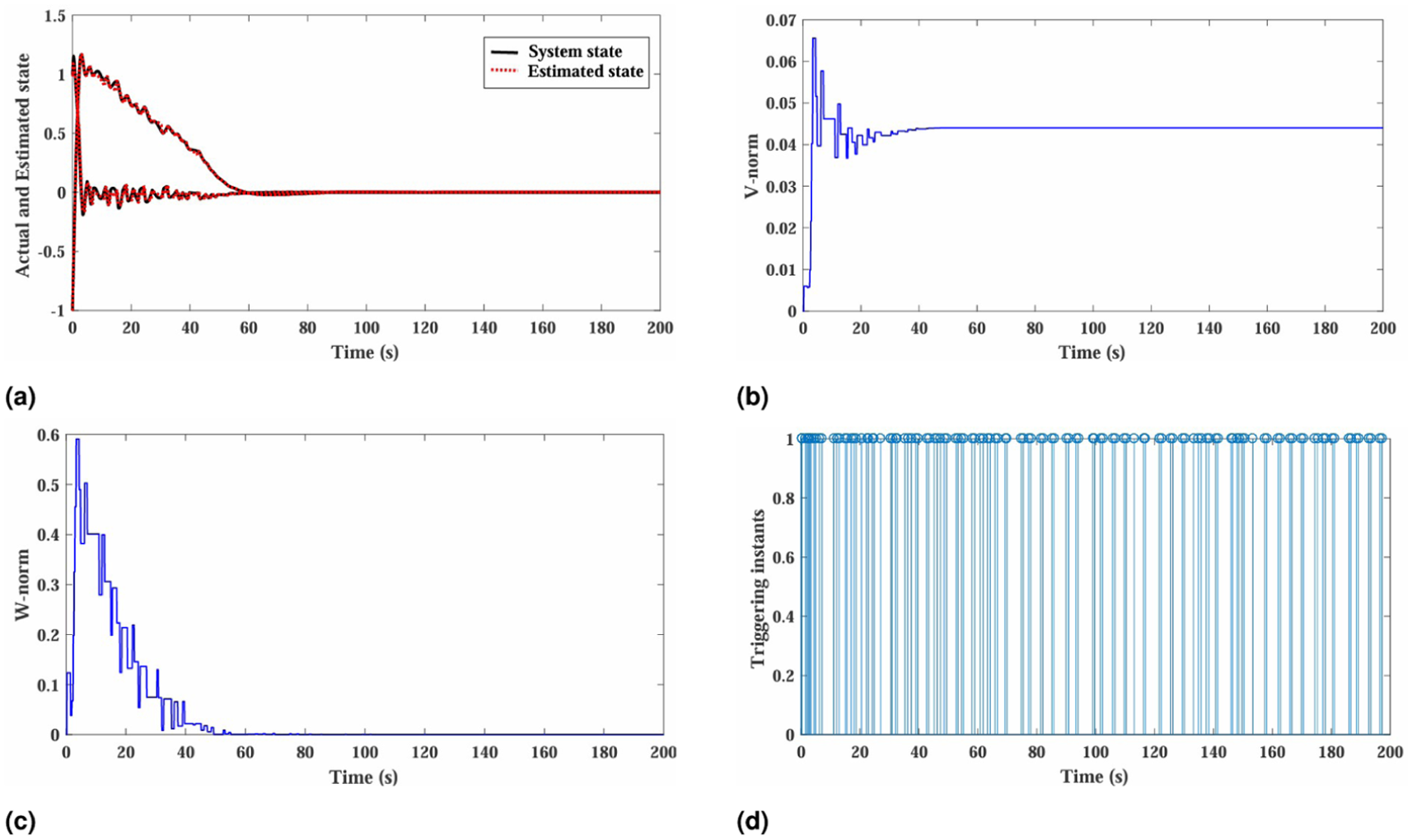
Example 2 without attack: (a) System state and estimated state, (b) NN weight norm history
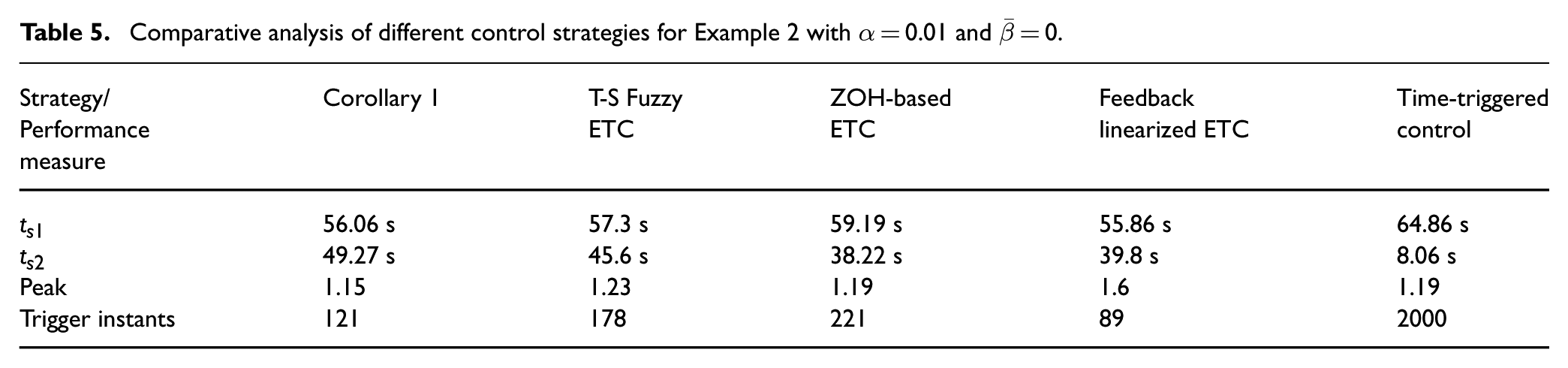
Comparative analysis of different control strategies for Example 2 with
Conclusion
An MB-ETC technique is presented in this research to control nonlinear delta operator networked systems under stochastic deception attacks and in the presence of disturbances. This technique uses aperiodic state transmission by employing ETC at the sensor end. Model-based methods are utilized for system approximation in between trigger instants in order to further minimize the number of transmissions. NNs are used to approximate the system’s unknown nonlinearity. NN weight update rules are computed and a stability condition is derived. Furthermore, a condition on MIET is devised to prevent the occurrence of Zeno phenomenon. The proposed control approach renders the system stable while lowering the transmission rate and maximizing the use of energy, computing power, and communication bandwidth. The proposed MB-ETC framework unifying CTS and DTS using delta δ operator can be extended to multi-agent systems, where each agent may share information aperiodically over a network while being resilient to cyber-attacks leading to an important extention of the proposed algorithm as a future direction.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.