
Abstract
This paper investigates the finite-time event-triggered consensus problem for switched multi-agent systems (SMASs). A hybrid event-triggered scheme is proposed that effectively eliminates the Zeno behavior. The triggering threshold dictates the quantity of sampled data transmitted to the controller. Based on this strategy, a finite-time stabilizing control protocol is designed. The protocol guarantees the finite-time stability of the SMASs with the time-varying delay. Furthermore, sufficient conditions for the finite-time consensus of asynchronous SMASs are established by constructing a Lyapunov–Krasovskii functional and designing agent-dependent switching laws with finite-time constraints. A simulation is conducted to demonstrate the effectiveness of the results.
Keywords
Introduction
Research on multi-agent systems (MASs) has increased significantly over the last 20 years due to their diverse applications, particularly in the fields of spacecraft formation flying (Xie and Liu, 2017), unmanned aerial vehicles (Lian and Deshmukh, 2006), and sensor networks (Olfati-Saber and Shamma, 2005). In recent years, more and more researchers have focused on consensus control of MASs and have achieved numerous theoretical advancements (Chen et al., 2024; Long et al., 2025; Wei et al., 2024). However, while achieving consensus is crucial, the dynamic behavior of these systems during the convergence process is equally significant.
As a significant part of system theories, short behavior is crucial in chemical reaction processes, missile operations, certain aircraft maneuvers, and so on (Ren et al., 2018a). To analyze the transient performance in dynamic systems, Kamenkov introduced the notion of finite-time stability (FTS) in his seminal work published in 1953 (Kamenkov, 1953). The concept of finite-time boundedness (FTB) was established by Amato et al. through extending the classical finite-time stability definitions (Amato et al., 2009). Although a system may achieve asymptotic stability, this property alone fails to meet practical engineering requirements when compared with FTS or FTB, since undesirable transient performance can still persist during the finite-time periods. Driven by this constraint, numerous findings on FTS and FTB have been published in recent years (Li et al., 2022; Ren et al., 2018b; Wang et al., 2024; Wu et al., 2022; Zhou et al., 2024).
However, current discussions on the consensus problem primarily focus on the asymptotic convergence, whereas less attention is given to the speed of convergence. In the practical engineering, there is an increasing demand for the convergence speed in multi-agent consensus, which often requires rapid consensus within a finite time (Sakthivel et al., 2019). Finite-time consensus has gained prominence in MASs research due to this requirement. The study (Liu et al., 2016) demonstrated that finite-time consensus exhibits more advantages than asymptotic convergence, such as improved performance under uncertain conditions and enhanced robustness. The finite-time consensus of MASs in directed and dynamically varying topologies has been explored in (Yang and Li, 2023). Another study (Wang et al., 2021) investigated the finite-time output consensus of MASs with directed topologies and the effects of perturbations. Finite-time consensus requires higher convergence efficiency, which in turn relies on highly efficient communication and control strategies.
Data transmission through communication networks has garnered considerable attention owing to the quick development of computer and network technologies (Li et al., 2023; Lu et al., 2025; Ren et al., 2024a). Although communication network schemes can reduce wiring and lower installation costs, they often also suffer from network congestion and data packet loss. To address the network challenges, the easiest method is the periodic sampling. However, frequent periodic control updates and data transmissions may overload the communication network and increase computational resource demands. To handle this issue, event-triggered mechanisms have been introduced to maintain system performance and avoid unnecessary sampling and redundant information transmission (Jia and Tang, 2018). Consequently, they have become a major point of interest in control theory and industrial applications over the last decade. For example, the study (Abbasi and Marquez, 2024) proposed an observer-based asynchronous periodic event-triggered strategy for MAS consensus. The study (Wang and Zhu, 2025) examined the consensus control for nonlinear MASs by the distributed dynamic event-driven strategy and proposed a time-event hybrid mechanism to eliminate the Zeno phenomenon. Different from basic schemes, this study (Ren et al., 2024b) investigated a fixed-time event-triggered sliding mode control strategy for multiple surface vessels to address environmental disturbances and input constraints. A learning-based dynamic event-triggered approach was proposed in Yuan et al. (2025) to realize optimal tracking control for heterogeneous agents without requiring prior model knowledge. An observer-based event-triggered scheme was introduced by Cheng et al. (Cheng et al., 2023), employing neural networks to achieve optimal control for nonlinear systems while reducing computational overhead. While event-triggered mechanisms are effective in saving network resources, a key challenge remains in ensuring finite-time consensus for MASs with switching dynamics.
A switched system is a specific type of hybrid system that comprises a set of subsystems and a rule governing the switching among subsystems. In the industrial control, many practical systems are accurately characterized as switched systems (Li and Yang, 2024; Tomlin et al., 1998; Williams and Hoft, 1991; Zhang et al., 2025). Switched multi-agent systems (SMASs) in this study refer to systems where each agent’s dynamics can be characterized by a switched system, but the methodology employed for MASs with non-switched dynamics does not directly apply to SMASs. In recent years, academic interest in SMASs has grown, and a substantial body of research has emerged. For example, Yang and Li (2024) introduced a distributed iterative learning control algorithm to achieve consensus of the nonlinear heterogeneous SMASs. He and Zhao (2023) studied leader–follower consensus for SMASs with uncertainties, time delays, and directed topologies. Jia and Zhao (2016) studied the output regulation problem of SMASs with stabilizable and unstabilizable subsystems using the average dwell time technique. Nevertheless, these studies have not adequately addressed the finite-time consensus problem. To date, the finite-time consensus problem of SMASs remains unresolved, which prompts us to urgently investigate this issue.
This study focuses on the finite-time consensus problem of asynchronous SMASs utilizing event-triggered mechanisms. The primary contributions of this work are summarized as follows:
Although the approach in Ren et al. (2018a) investigates the finite-time control for switched systems, it is not directly applicable to SMASs. To overcome this limitation, we develop a piecewise function and integrate it with our proposed finite-time control protocol. By virtue of this function, we transform the original system into an SMAS with time-varying delays. By constructing a Lyapunov–Krasovskii functional and designing agent-dependent switching laws with finite-time constraints, we guarantee the finite-time consensus for SMASs.
In contrast with Ren et al. (2018b), Abbasi and Marquez (2024), and Wang and Zhu (2025), this study introduces a hybrid event-triggered control approach for SMASs. By co-designing periodic sampling and threshold adjustment mechanisms, the proposed strategy avoids the Zeno phenomenon through analytically derived minimum inter-event intervals, along with ensuring the finite-time performance. Furthermore, the trigger threshold governs the quantity of sampled data transmitted to the controller, and higher threshold values reduce transmission of sampled data to the controller.
Problem description
Basic theory of graphs
The interaction of information among agents is commonly represented using a topological graph. We let
Problem statement
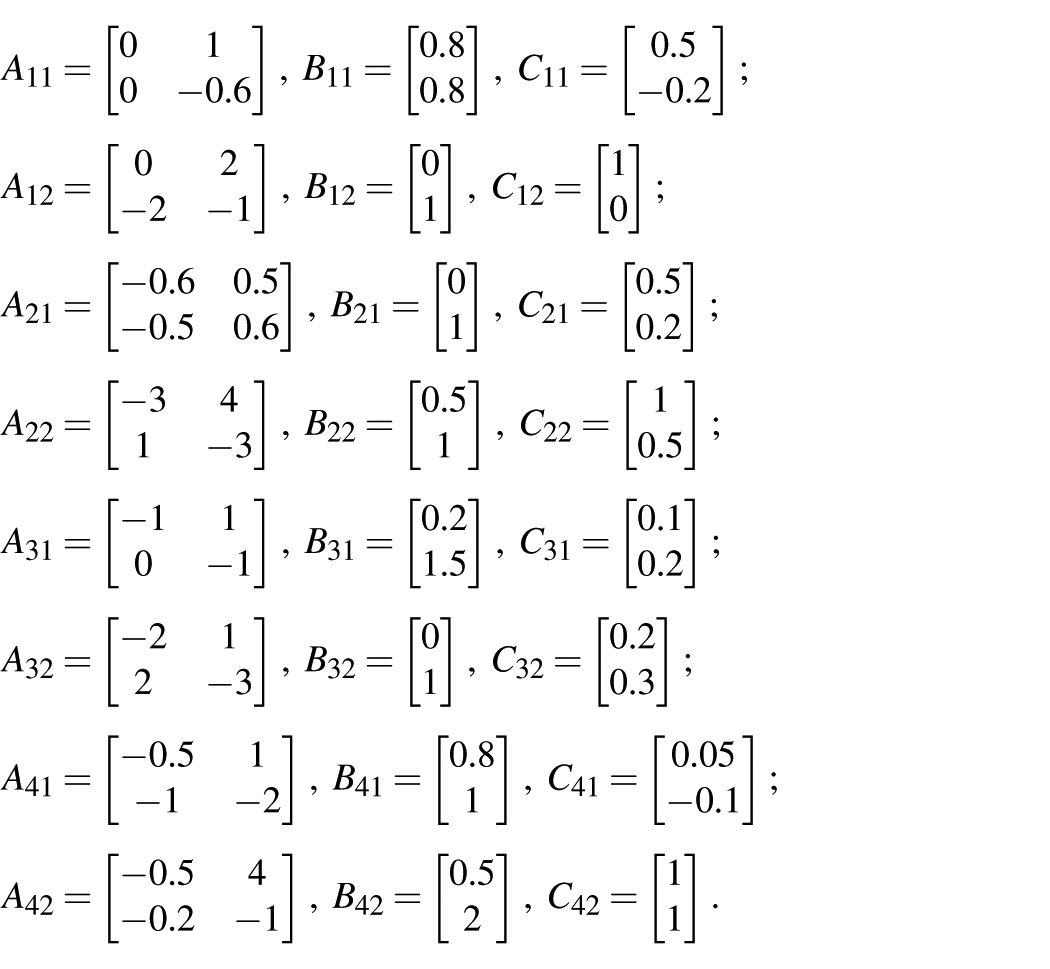
Consider the SMASs consisting of N agents, where the dynamics of the

where

where
Design of controller
In this section, a distributed control protocol with an event-triggered strategy is constructed, which enables SMASs to achieve consensus within the finite-time. Initially, an event-triggered strategy is devised for SMASs. The decision to transmit the currently sampled data at the sampling instant
Here, the triggering instants for the
where

where
Consider the measurement error for the data sampled at the

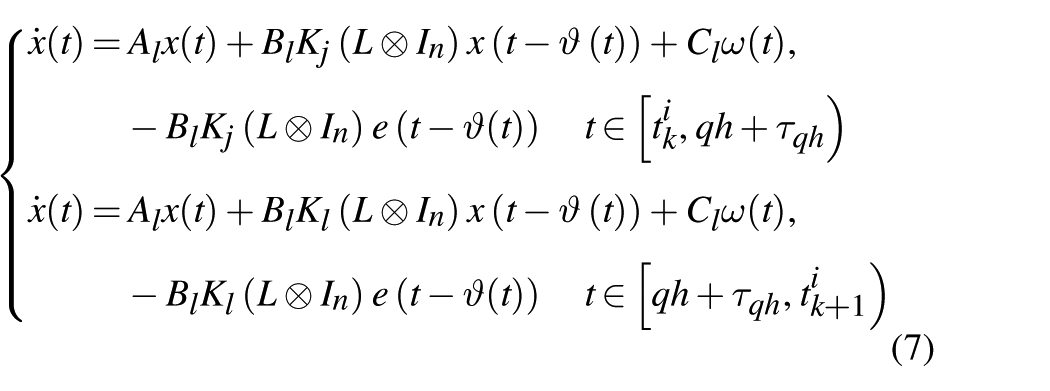
For convenience, the signal interval
Defining a piecewise function
We employ the merging technique (Ma and Zhao, 2020) to describe the switching signal of the SMASs. The merging action is denoted by ⊕ such that
The compact form of equation (6) is expressed as:
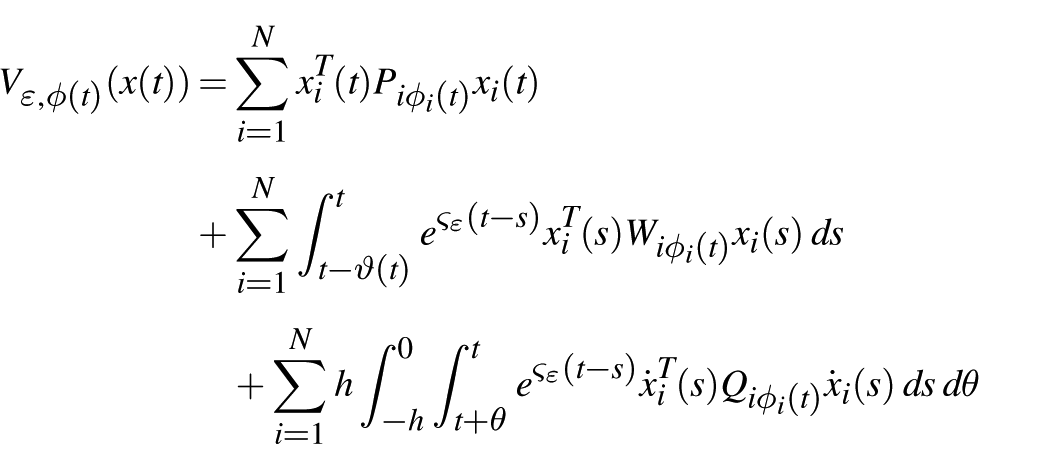
Before giving the main theorem of this paper, the relevant lemmas and definitions are given.

where
where
Main results
Next, sufficient criteria ensuring finite-time consensus for the system (7) under event-triggered control are established.





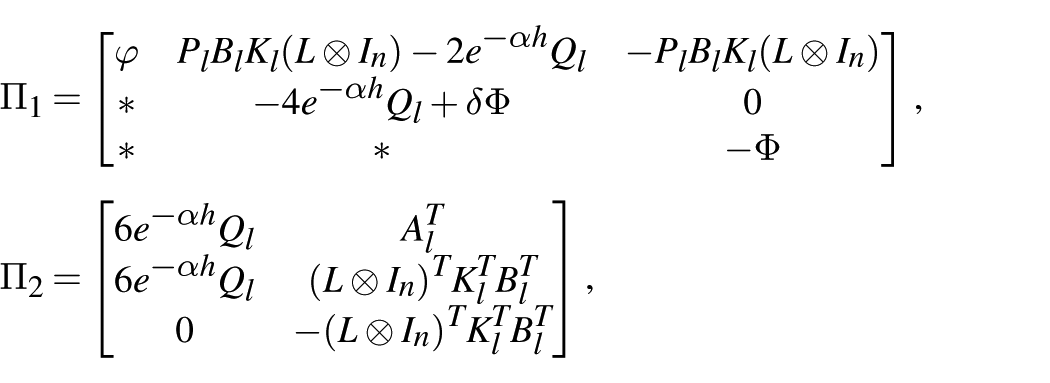
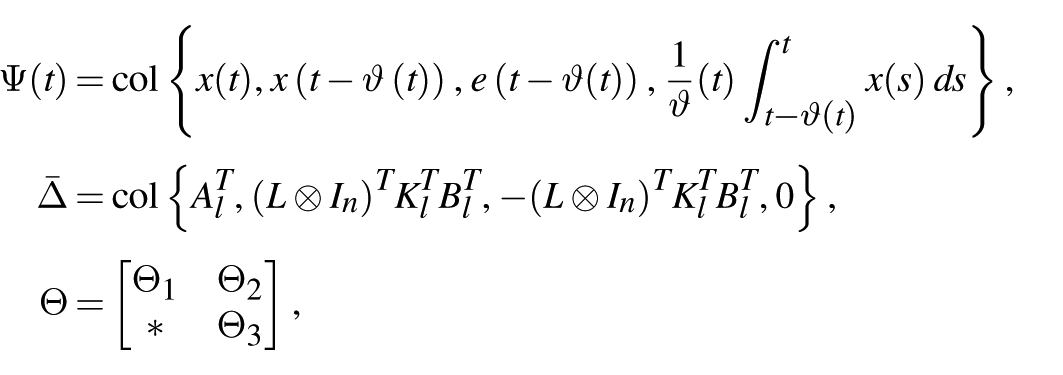
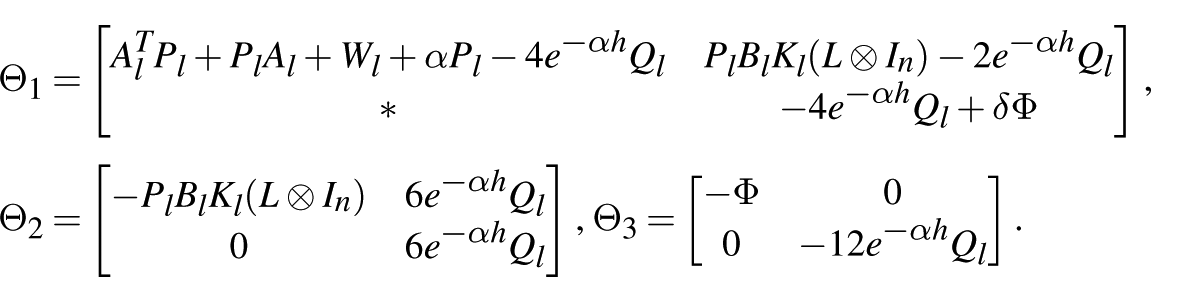
where
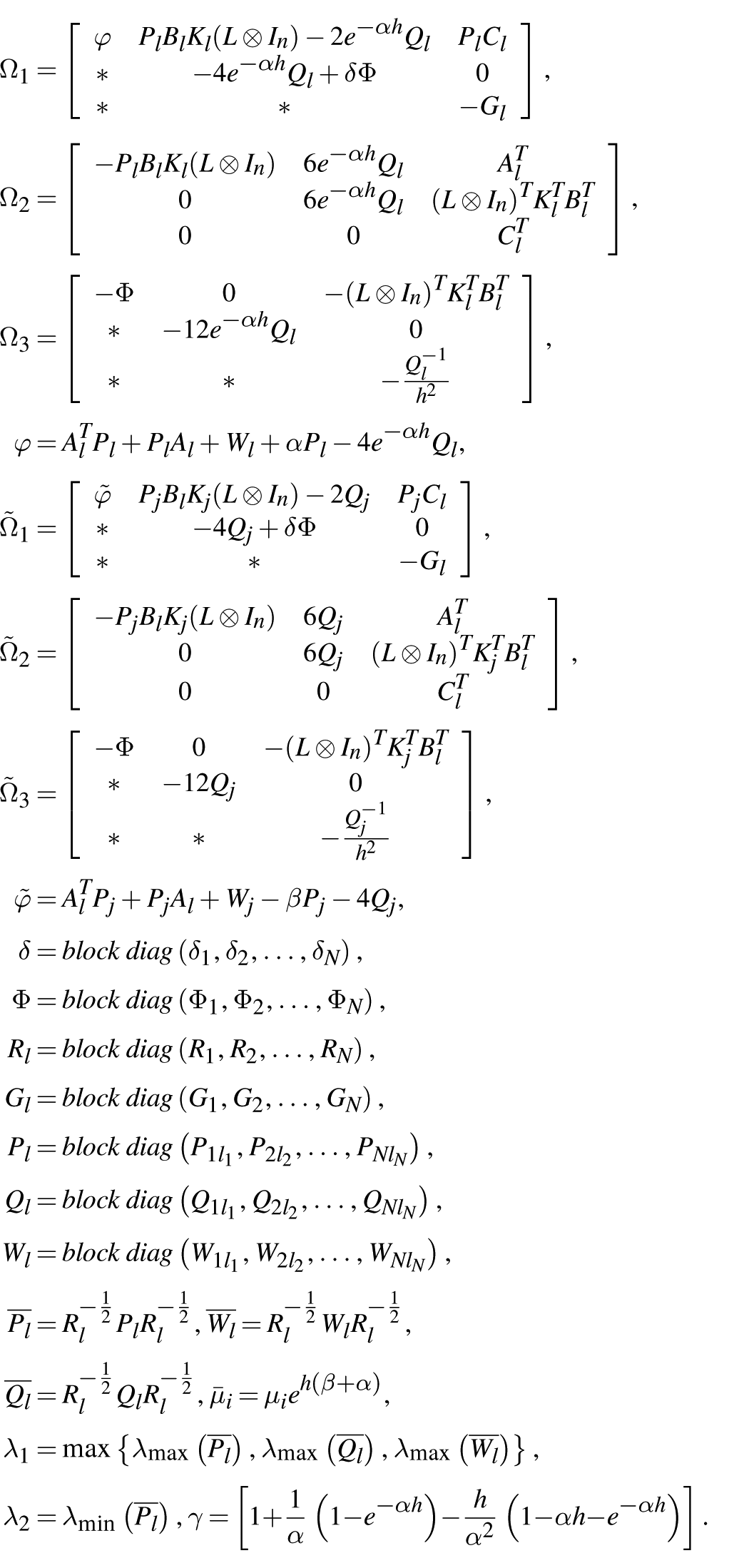

where
and
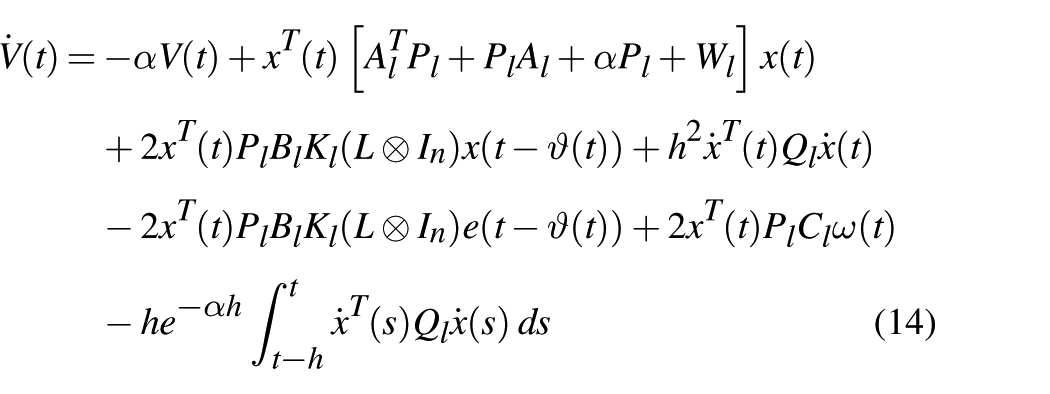
From Lemma 1, one has
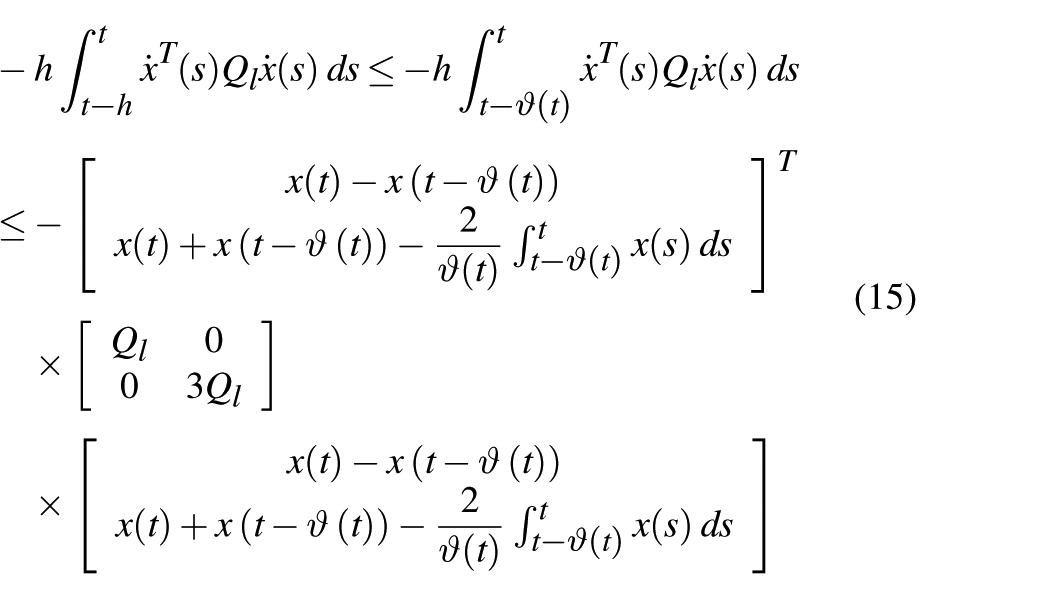
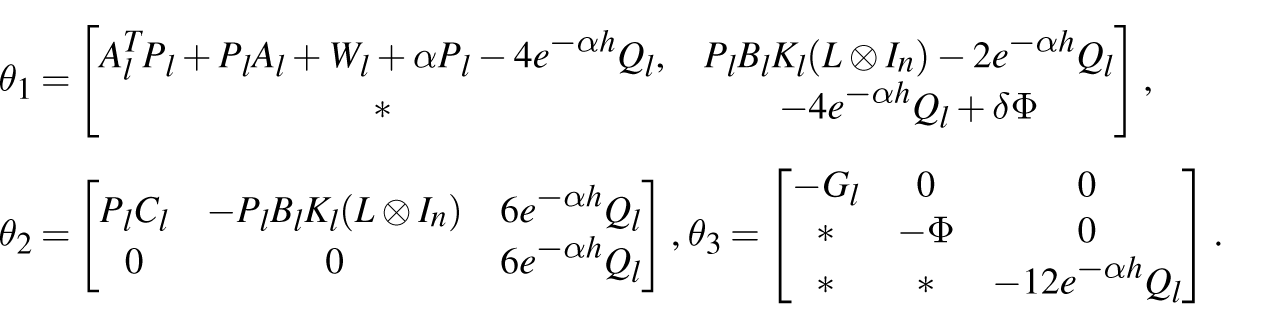
Then, from (14) and (15), we can get

where


and
Using the inequality (8) and the


Due to transmission delays in switching signals within the network, the system and the controller’s switching signal are inconsistent. We analyze the timing characteristics of the controller’s switching actions.
Note that
Without loss of generality, let
where
Identically,
Thus,
From (11), (13), and (21), we get

and

Further combining with inequality (12) yields

Hence, the proof is concluded.
When
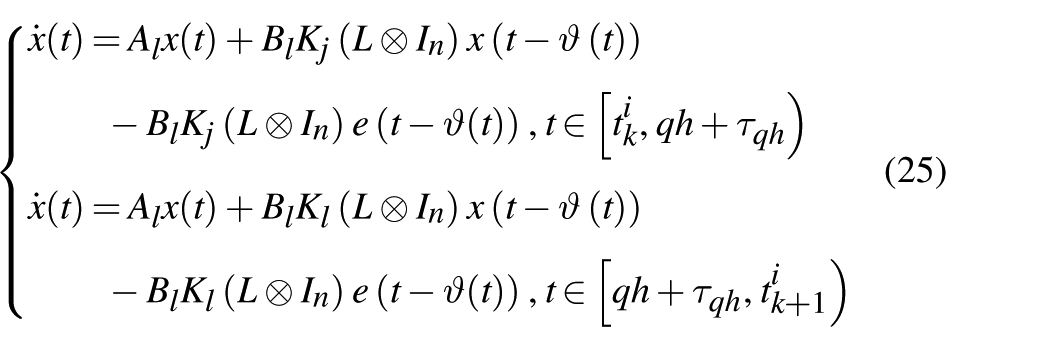
A condition that ensures the closed-loop system (25) is stable within a finite time is given.





where
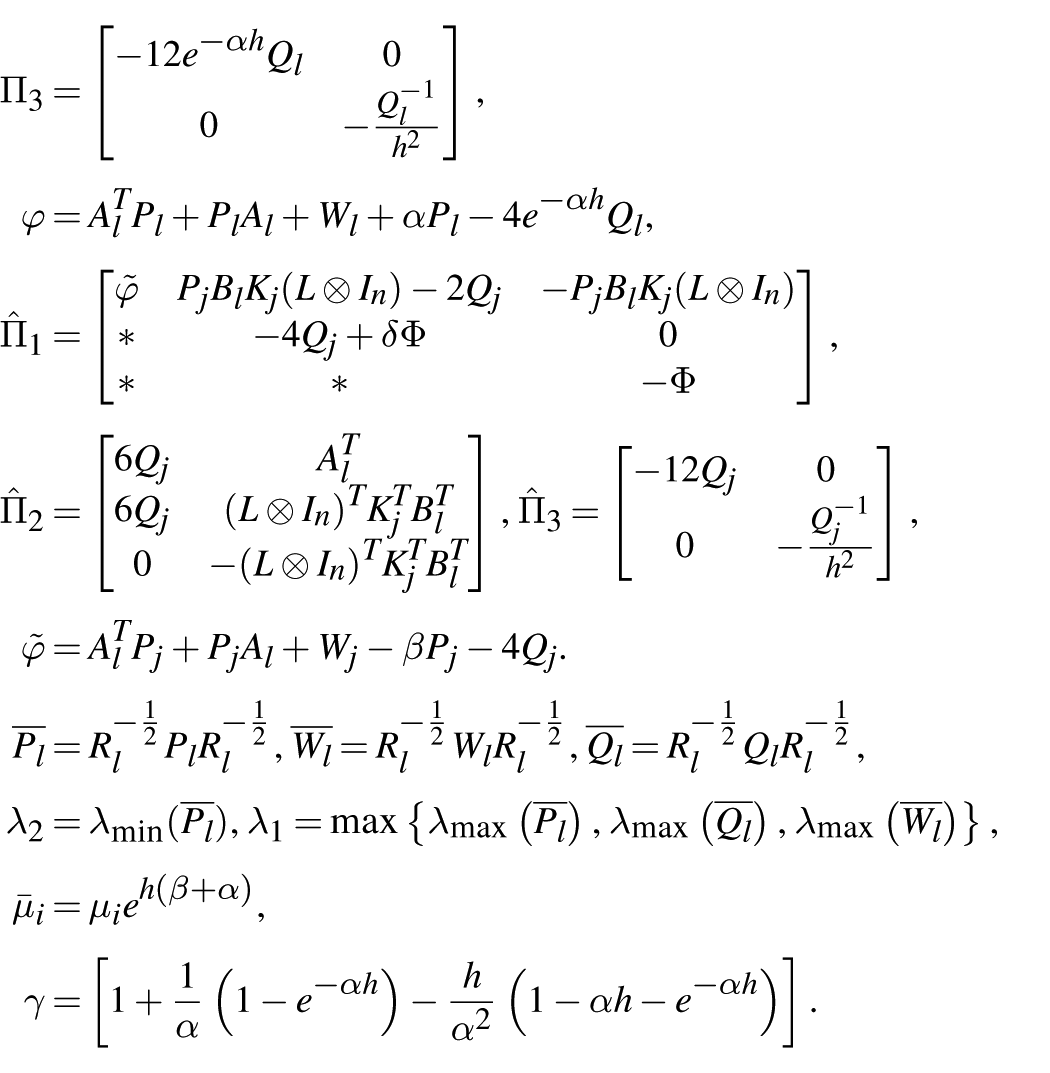

where
and
From (26) and the

When operating asynchronously, there is

Similarly to (19)–(21),

By (29), (30), (34), and

which completes the proof.
Numerical example
Agents’ communication connections are displayed in Figure 1. The parameters in triggering condition (2) are chosen as

Communication network among agents.
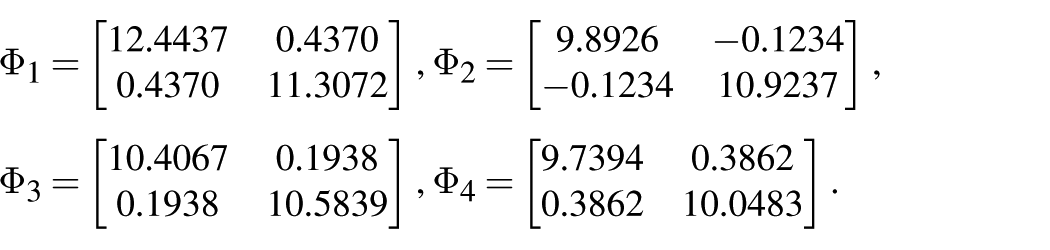
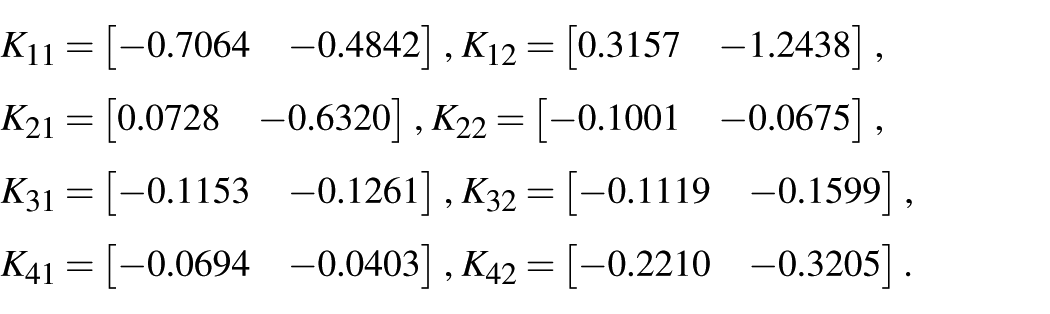
Corresponding controller parameters are
Select
According to the set condition of the average dwell time of the agent, one obtains that

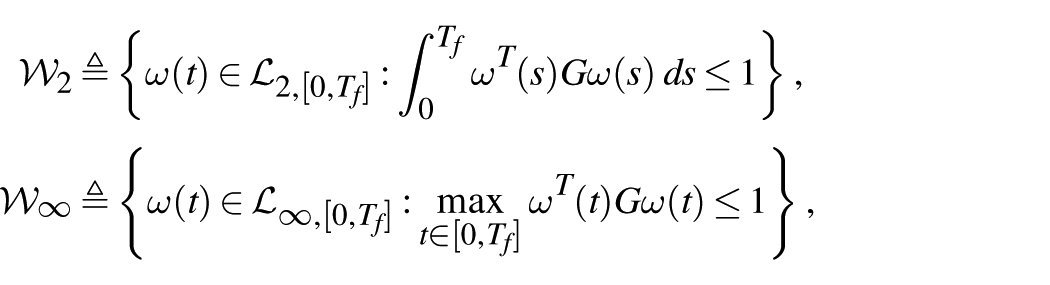
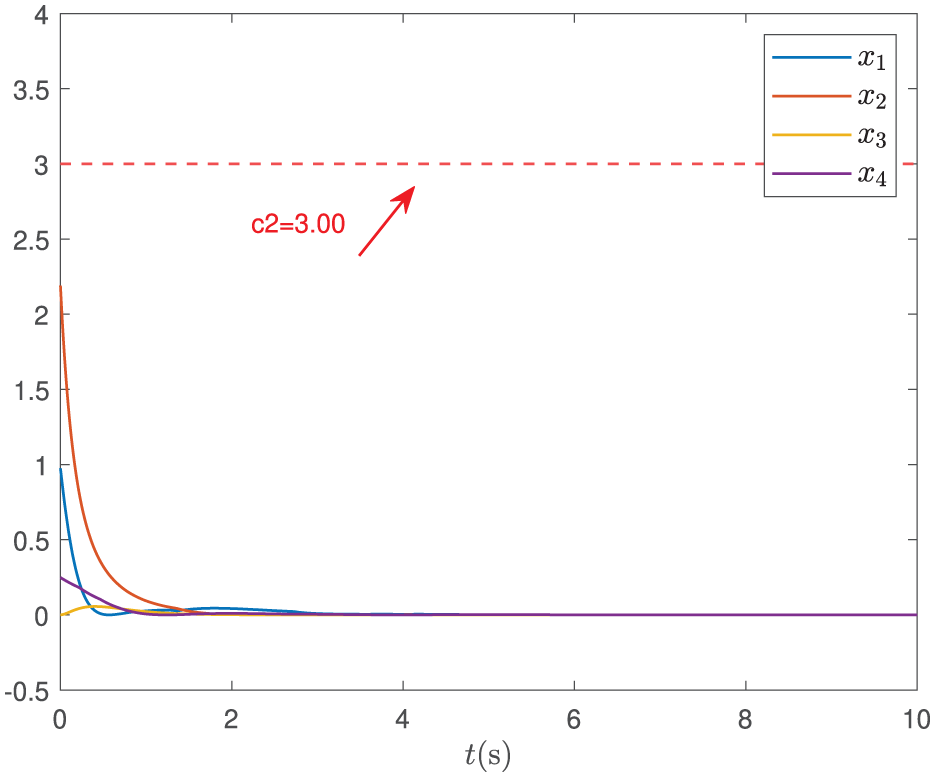
In Figures 2–9, the simulation results are illustrated, with the initial condition set at
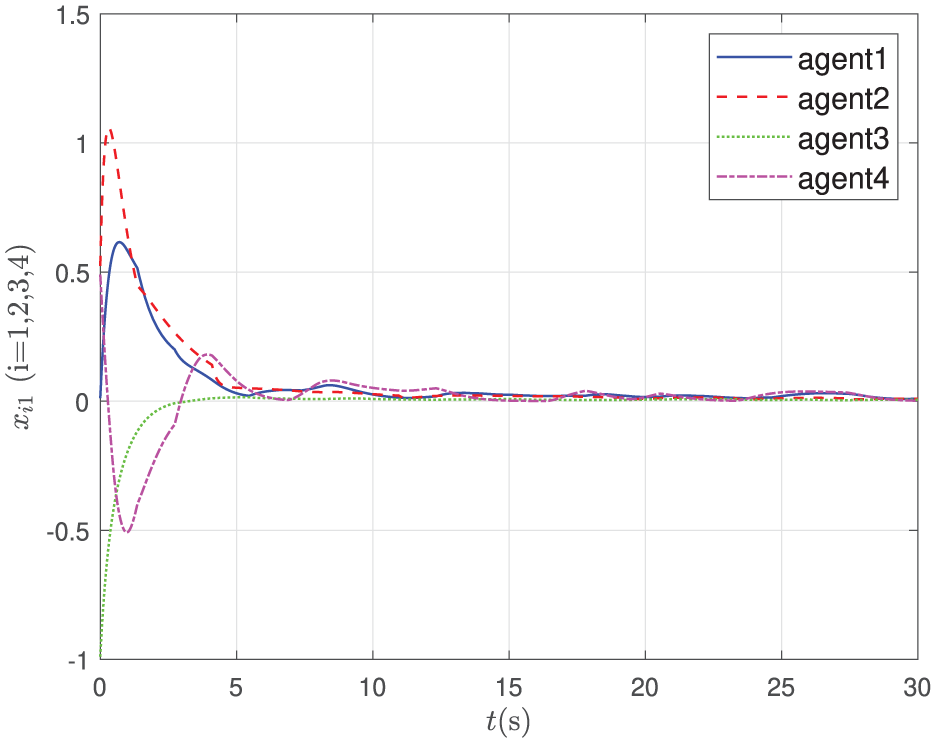
State trajectories
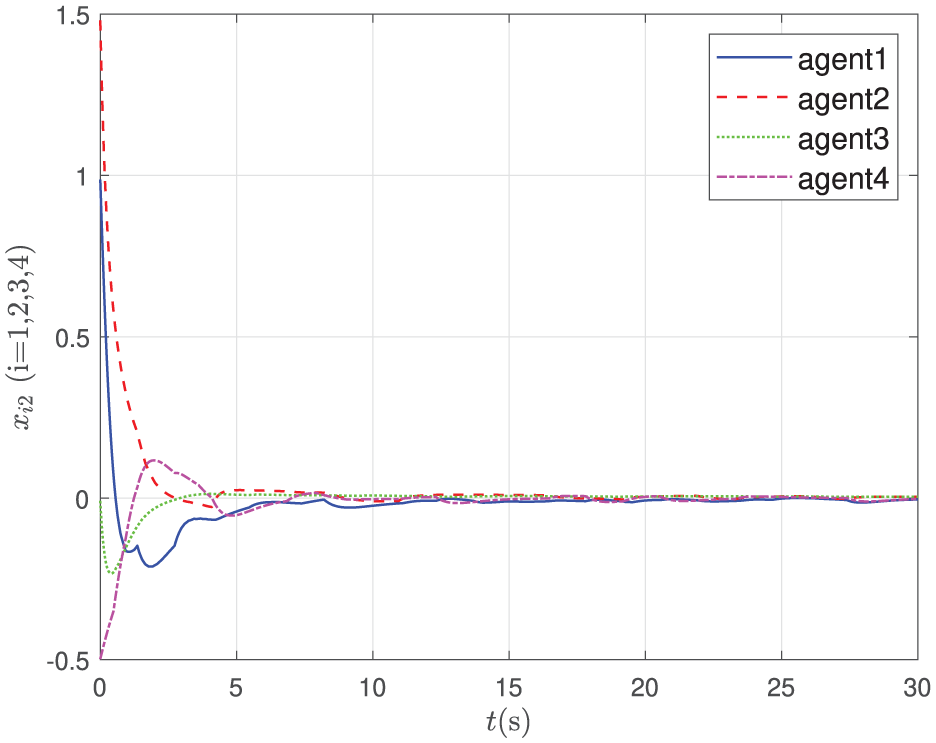
State trajectories
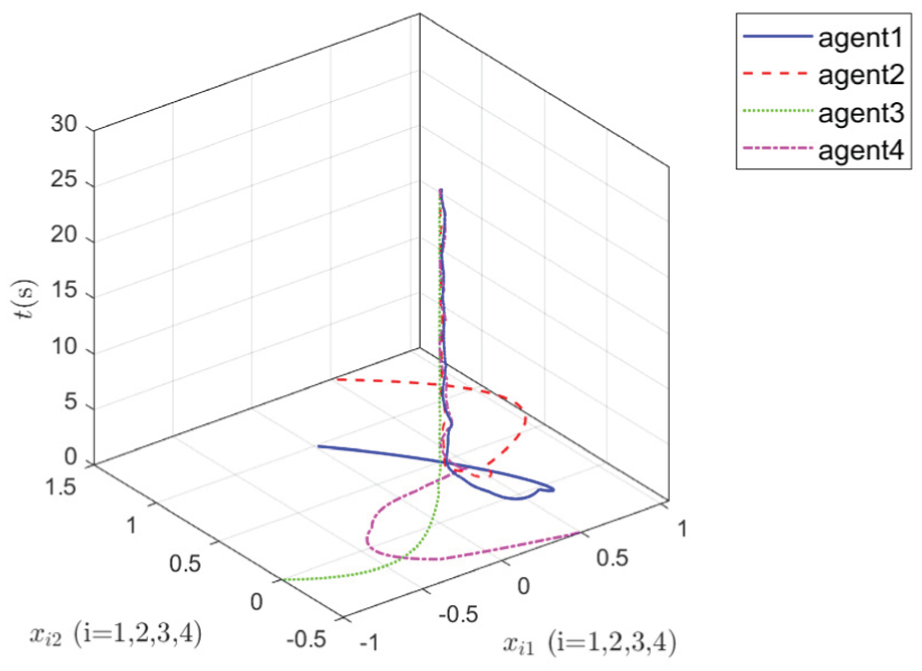
State evolution of the four agents.
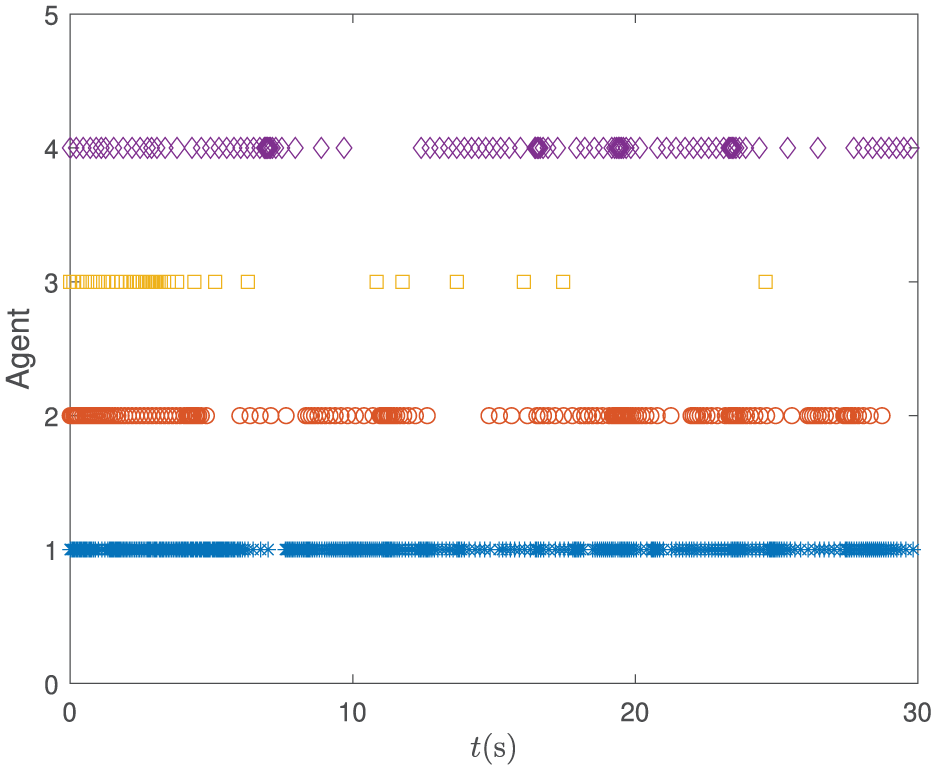
Triggering instants of agents under the event-triggered scheme.
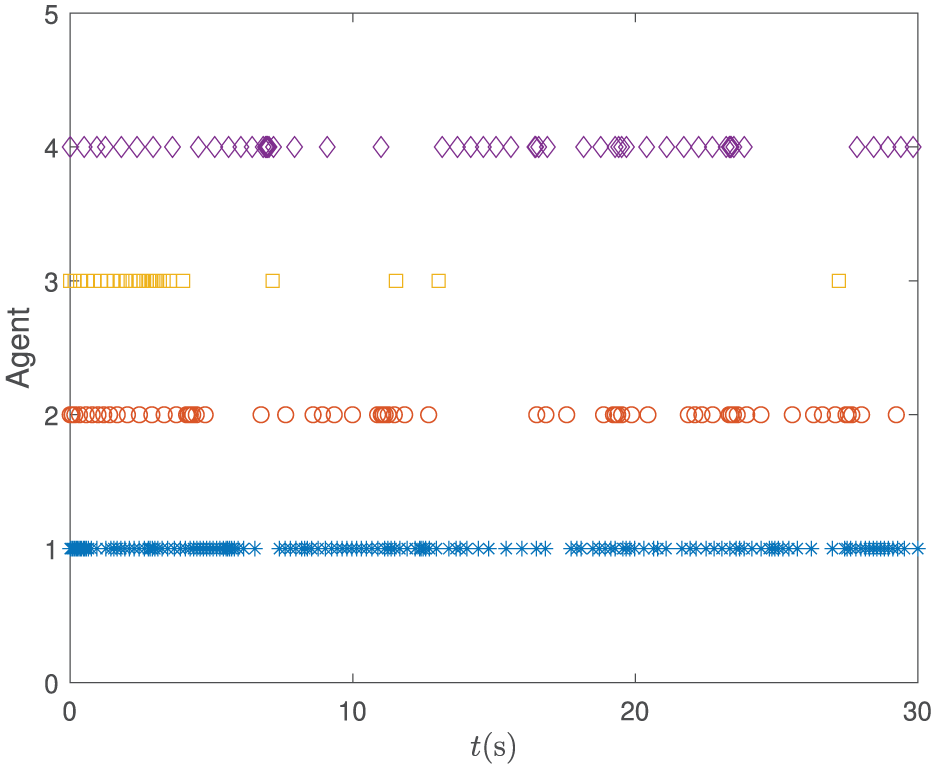
Triggering instants of agents after increasing the threshold.
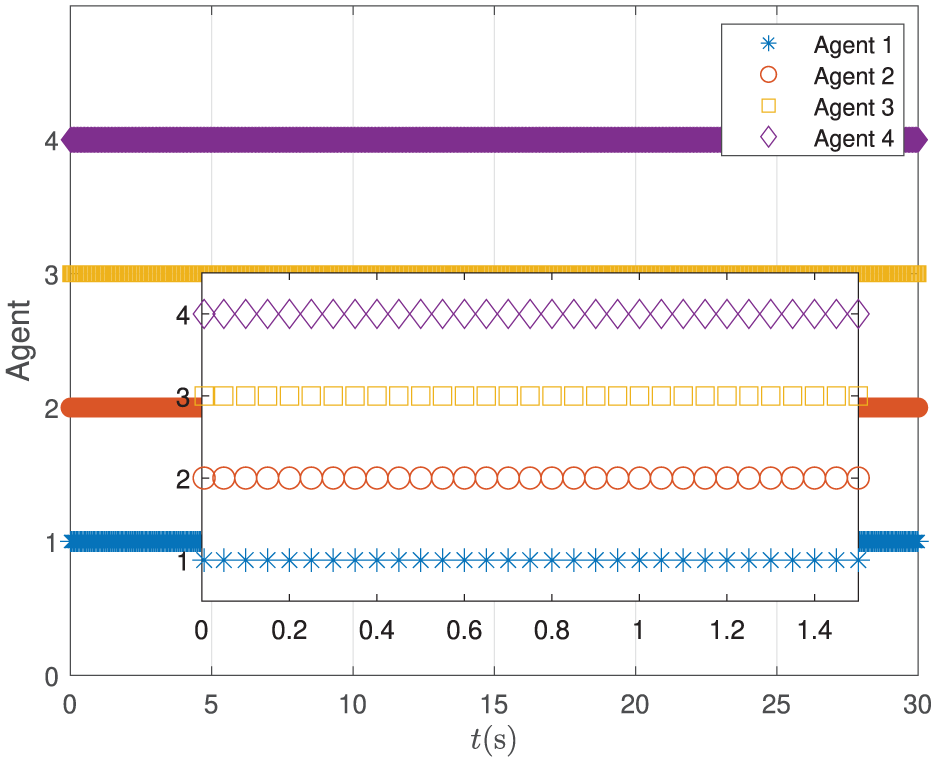
Triggering instants of agents under the time-triggered scheme.
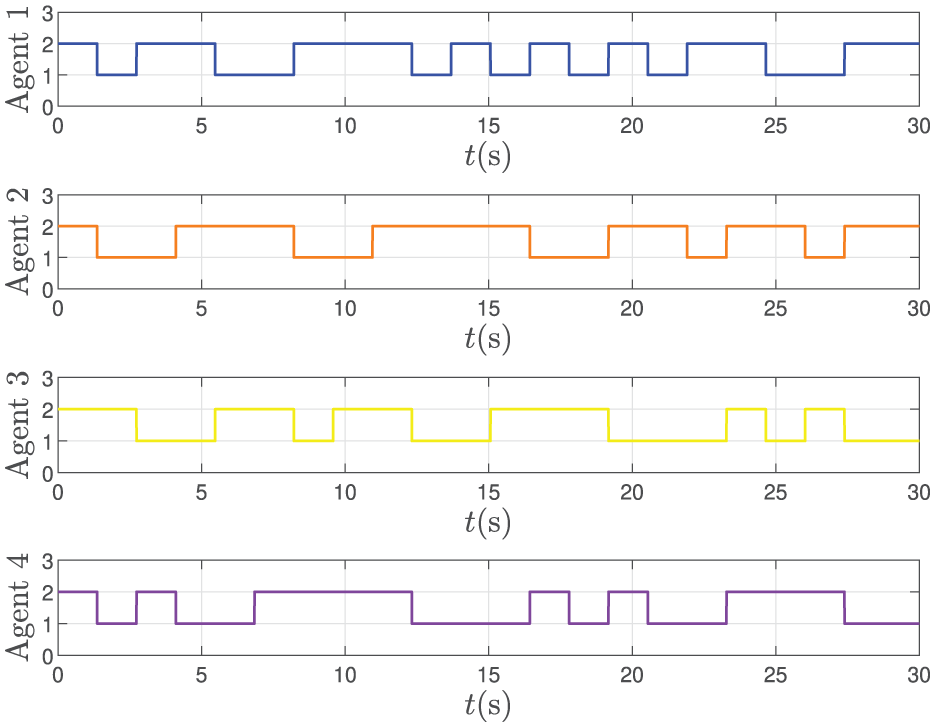
The switching signal of agents.
Time history of
Conclusion
In this study, we investigate the finite-time consensus problem for a class of asynchronous SMASs. Under a hybrid event-triggered mechanism, we introduce a finite-time stability control protocol. By employing the Lyapunov–Krasovskii functional and agent-dependent switching laws with finite-time constraints, finite-time consensus is achieved for asynchronous SMASs. Moreover, in the proposed event-triggered mechanism based on periodic sampling, the Zeno behavior is prevented by choosing a sufficiently small fixed sampling period h, which guarantees that the inter-event interval exceeds at least one sampling period. Furthermore, the trigger threshold governs the quantity of sampled data transmitted to the controller, and higher threshold values reduce the transmission of sampled data to the controller. Future research will generalize these findings to nonlinear asynchronous SMASs, where the increased complexity arising from nonlinear interactions demands innovative analytical approaches.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under the grant 61503254, the Liaoning Provincial Natural Science Foundation Joint Fund (General Funding Program Projects) under the grant 2023-MSLH-258, and the Basic Research Program of Liaoning Provincial Education Department under the grant JYTMS20231220.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.