This paper investigates the issues of finite-time - boundedness and resilient control for a class of Semi-Markov jump systems (SMJSs) with disturbances. By conducting an analysis on the finite-time - boundedness of stochastic SMJSs, we established a series of sufficient conditions to ensure the desired boundedness property. In light of uncertainties present in both the system dynamics and the external environment, mode-dependent resilient controllers are proposed for the boundedness of the uncertain system. The system’s modal switching is regulated by an SMJS. The developed resilient control strategy is designed to attenuate the peak magnitude of the system output, thereby attenuating or even eliminating the detrimental effects caused by abrupt external disturbances. Finally, a numerical example of a quadrotor unmanned aerial vehicle (UAV) altitude control system is included to illustrate the performance of the presented control strategy.
Markov jump systems (MJS), as an important category of stochastic switched systems, have been widely applied in fields such as network control (Ding and Li, 2020), power systems (Griffo and Wang, 2012), and aerospace (Harish and Michael, 2018) since their inception by Krasovskii and Lidskii in the 1960s, owing to their efficacy in characterizing random abrupt changes in system modes. However, conventional MJS suffer from a fundamental limitation: the sojourn time is governed by an exponential distribution for continuous-time cases, or a geometric distribution for discrete-time cases. This memoryless property assumption results in constant transition probabilities, rendering MJS inadequate for modeling time-varying and history-dependent switching behaviors in practical systems. To address these constraints, researchers introduced SMJS. In SMJS, transition probabilities depend on the current state’s sojourn duration, which may follow any arbitrary stochastic distribution (e.g., Weibull distribution (Wang et al., 2018)), significantly enhancing model applicability. Research on stabilities and stabilization problems in SMJS encompasses both discrete-time and continuous-time domains: studies in discrete time are based on semi-Markov kernels (SMK) and σ-mean-square stability (Zhang et al., 2016), while in the continuous-time framework, scholars have resolved critical issues such as performance (Shen et al., 2024) and finite-time stability (FTS) (Ran et al., 2023) through methodologies including Lyapunov stability theory, sliding mode control (Qi et al., 2022), and event-triggered mechanisms (Liu et al., 2020). Representative advances include Ahn’s design of an asynchronous sliding mode controller for nonlinear SMJS (Qi et al., 2022) and Han’s investigation of the finite-time filtering problem for semi-Markovian systems under deception attacks, incorporating an event-triggered scheme (Ran et al., 2023). Recent advancements have also further extended SMJS frameworks to networked environments, addressing robust stability under random communication delays (Qiu et al., 2025).
FTS, renowned for its enhanced response efficiency, excellent robustness, and disturbance rejection capabilities in finite time, has emerged as a research hotspot in the control community, garnering considerable interest in the past few years. The concept of FTS was introduced by Dorato (1961) and Weiss and Infante (1967) in the 1960s. Its core value lies in addressing stringent transient performance requirements encountered in practical engineering applications. Differing from asymptotic stability, which is assessed over an infinite time horizon, FTS confines the time interval to a finite value (e.g., spacecraft attitude requiring adjustment completion within 10 seconds (Shi et al., 2021)). It also requires the system’s initial state to start inside a prescribed region and its state trajectory not to exceed specified bounds at any time during the finite interval. This characteristic endows FTS with distinct advantages in scenarios demanding high response speeds, such as networked control systems (Xia et al., 2017). However, practical systems are frequently subject to external disturbances, rendering finite-time boundedness (FTB), an extension of FTS, more significant from an engineering perspective. FTB does not require the state to converge to an equilibrium point; instead, it merely guarantees that the state remains bounded within the finite time interval, for instance, maintaining voltage within a safe range during grid short-circuit faults (Yao et al., 2021). To deal with system uncertainties and faults, adaptive finite-time neural control schemes have been developed for MJS, providing effective strategies for achieving FTB in aircraft engine models (Li et al., 2025). Concerning disturbance attenuation performance metrics, performance primarily focuses on minimizing the gain from disturbance to output, emphasizing long-term energy-consumption optimization (Shen et al., 2024), yet it cannot directly constrain instantaneous peaks. Conversely, the - performance index aims to suppress the peak output induced by bounded disturbances within finite time, thereby guaranteeing instantaneous safety (Sun et al., 2015). A representative application is the rapid current-limiting protection for short-circuit faults in power electronic systems (Qi et al., 2021). Although certain achievements have been made in current research on - performance and finite-time bounded control, such as filter design for discrete-time SMJS (Wang et al., 2022) and FTB criteria under event-triggered mechanisms (Sang and Zhao, 2022), significant deficiencies persist. First, research on continuous-time SMJS is severely deficient; existing results predominantly concentrate on discrete systems, with only preliminary explorations observed for T-S fuzzy models (Wang et al., 2019) or finite-time stabilization for switched nonlinear systems (Pang et al., 2025). Second, there is an absence of resilient control mechanisms; the issue of performance degradation under controller parameter perturbations has not yet been resolved through the incorporation of resilient control strategies.
Practical systems are frequently subjected to sudden disturbances and attack threats (He et al., 2021), making it challenging for traditional control strategies to guarantee autonomous recovery capability post disturbance. Consequently, Zhang et al. proposed resilient control (Mahmoud et al., 2001), whose core objective is to endow systems with the resilience for rapid performance recovery. This approach has found applications in domains such as transportation (Wan et al., 2018) and power systems (Pan et al., 2023). Compared to robust control, resilient control emphasizes dynamic recovery characteristics; for instance, enabling a helicopter to swiftly restore its attitude after encountering sudden wind gusts (Chen and Li, 2019). While recent work has pioneered resilient finite-time control for discrete-time SMJS by considering sojourn time thresholds (Pan et al., 2024). However, the collaborative optimization of resilience and - performance for continuous-time SMJS remains unexplored. Furthermore, existing results have not incorporated - FTB—a performance index capable of suppressing instantaneous peaks. While the resilient mechanism ensures post-fault recovery, the synergistic combination of these two aspects holds significant importance for high-security systems such as smart grids.
Given the current scarcity of research on - control for continuous-time SMJS and the absence of resilient design methodologies, this paper constructs a resilient - finite-time control framework. This work bridges the research gap concerning the collaborative optimization of disturbance recovery and instantaneous safety for SMJS. The boundedness condition of the system is characterized by linear matrix inequalities (LMIs). The key contributions of this work are outlined below:
In contrast to the frameworks emphasizing asymptotic stability found in most existing finite-time and performance criteria (e.g., Pan et al., 2024; Shen et al., 2024), the proposed finite-time - performance criterion is designed to guarantee the minimization of the output peak caused by bounded disturbances within a finite time interval, thereby enhancing real-time safety guarantees. Moreover, unlike conventional FTB studies, our approach simultaneously guarantees FTB and optimizes the – performance index, providing a tighter characterization of transient safety.
Mode-dependent resilient controllers are designed and integrated with finite-time - control to ensure autonomous recovery capability following disturbances. This approach eliminates interference from both controller parameter perturbations and system-mode transitions.
The proposed control theory is validated by a quadrotor unmanned aerial vehicle (UAV) case study featuring actual wind disturbances, a precise dynamic model, and a demonstrated mode-switching strategy.
Notations
In this paper, denotes the n-dimensional Euclidean space, and so on for analogous cases; represents the weighted Euclidean norm, where Λ is the weighting matrix; represents the set of natural numbers beginning with 1, that is, ; refers to the augmented state vector ; refers to the conditional probability ; the set of eigenvalues of matrix is denoted by , then refers to the maximal(minimal) eigenvalue of a matrix ; () denotes the supremum (infimum) of a set or function.
Problem setup and preliminaries
Consider the continuous-time SMJS described by:
Consider the initial condition . The matrices , , , and , where , represent the state, input, output, and disturbance input matrices, respectively. Their dimensions are contingent on the current mode . The evolution of the system’s operational mode is dictated by a semi-Markov process , which takes values from a finite set . Within this framework, signifies the state vector, is the control input, represents the external disturbance, and denotes the controlled output.
The dynamics of the semi-Markov process are characterized by the following probability transition rate:
Let the sojourn time h represent the elapsed time following the latest jump event. For , the function defines the transition rate from state i to state j. During a sojourn in mode i, the transition rate is defined as . Here, signifies the little-o Landau symbol, satisfying . A key property is that all transition rates are functions solely of h.
In this paper, resilient controllers incorporating - finite-time control will be designed to ensure autonomous recovery capability and boundedness for systems subject to disturbances. The controller is formulated in the following form:
and , for , are known real constant matrices. The term represents an unknown real matrix-valued function whose elements are Lebesgue-measurable and satisfy the bounded condition , where I denotes the identity matrix. For notational simplicity and to prevent confusion, we omit certain parameters and abbreviate , , , , , , and as , , , , , , and , respectively.
Assumption 1.The time-varying disturbance signalacting on the system is a bounded peak signal over the finite time interval,
where, are known positive constants.
Definition 1.(Cao et al., 2020) Given constants, , and a positive definite matrix Λ, Assumption 1 holds. For, if the following condition is satisfied:
then the system is finite-time bounded.
Definition 2.(Xu et al., 2020) Given a constant, if system (1) simultaneously satisfies Definition 1 and the following condition:
then the system is said to be-finite-time bounded.
Lemma 1.(Xie et al., 1992) Ifholds, then there exist constant matrices H and R, along with a constant, subject to the following inequality constraint:
Lemma 2.(Yao et al., 2021) If a matrixis partitioned into four blocks, denoted as, , , and, then the following expression holds:
Main results
FTB analysis for semi-Markov jump linear systems
Theorem 1.Given constantssatisfying the requirements in Definition 1, and constants, . If there is a positive definite matrixthat satisfies the subsequent inequality:
where, , then the system (1) is finite-time bounded.
Proof. When , we construct the following Lyapunov function:
represents a symmetric and positive definite matrix. For a given mode , is specified as . denotes the weak infinitesimal operator of the stochastic process . Then, the following holds:
where δ denotes a small positive quantity. Subsequently, we apply the Conditional Probability Formula and the Law of Total Probability to obtain:
SMJSs exhibit transition probabilities that rely on the sojourn time h. Let denote the cumulative distribution function (CDF) of the sojourn-time h. Then, represents the probability of remaining in the current state for an additional time interval δ, while gives the probability that the sojourn time exceeds or equals h. Here, the transition probability from state i to state j is defined as . According to the first-order Taylor expansion, we have: .
Therefore, equation (13) can be equivalently rewritten as:
Consequently, we have , and according to Definition 1, the system is finite-time bounded.
Although Theorem 1 provides the FTB conditions, the existence of coupling terms prevents existing toolboxes from effectively computing controller parameters. Therefore, it is necessary to further decouple the conditions in Theorem 1. During the decoupling process, we incorporate resilient control inputs and derive the system-stabilization conditions. Moreover, due to the time-varying element in equation (9), the existence of countless different sojourn times would require testing infinitely LMIs, which is computationally prohibitive from a numerical perspective. Thus, this issue will be addressed in the proof of Theorem 2.
Design of resilient controllers and theorem decoupling
Theorem 2.Given constants, , , , and, where, if there exist a positive definite matrixand controller gainssuch that the following LMIs are feasible:
According to equation (35), there always exists a sufficiently small for which:
that is,
that is,
According to Lemma 2, we can obtain the following:
where .
From, we can directly derive:
Consequently, a sufficient condition for equation (9) is given by:
where .
When applying the resilient control input , where , thus , substituting it into (39) yields:
The second term is identical to:
that is,
Thus,
Applying Lemma 1, we can obtain:
Assume that:
According to Lemma 2, the equation (40) can be equivalently rewritten as:
that is,
Consequently, with the inclusion of resilient control inputs, a sufficient condition for equation (9) is given by:
For a given h, can be expressed as a linear combination: , where and . Consequently, we construct the following expression:
By adjusting and , all possible values of (Barlow et al., 1996) can be constrained. Hence, we obtain the following two conditions such that the simultaneous satisfaction of both ensures the fulfillment of equation (46).
Furthermore, since , it follows from equations (32) and (33) that:
Since , equation (55) can be equivalently expressed as:
Noting the initial condition , from equation (24), we have:
According to Definition 2, the system is finite-time - bounded.
Case study
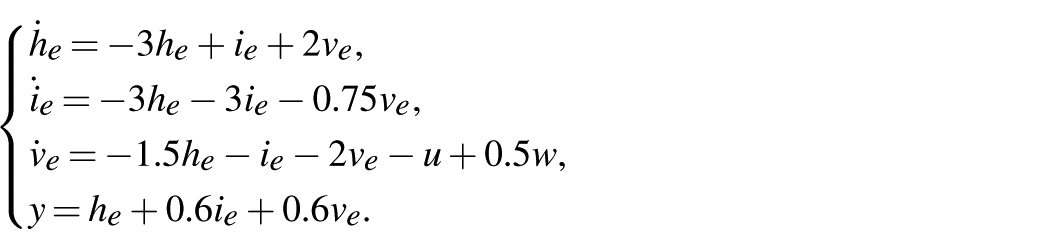
This section presents a numerical example of a quadrotor UAV altitude control system to validate the merits of the designed control strategy. The system dynamics are defined as follows.
Let denote the tracking error between the desired and actual altitude. The velocity error is defined as , representing the difference between the desired and actual vertical velocities. The integral of the altitude error is given by . The control input, that is, the thrust command, is denoted by u. To emulate a realistic gust disturbance scenario, an external disturbance ω, which attenuates within a finite time duration, is introduced into the system. The system output y is designed as a weighted composite metric for performance evaluation, incorporating the altitude, velocity, and integral errors. All variables are time-dependent.
Based on the quadrotor UAV dynamics, we have:
Regarding the parameter design, a proportional-integral-derivative (PID) control architecture is employed. To ensure comprehensive feedback from velocity, position, and integral terms, minor modifications have been introduced to the conventional dynamic model, thereby enhancing the system’s robustness. These parameters represent the equivalent error dynamics of a pre-stabilized system, where coupling terms are included to model active damping and potential aerodynamic interferences.
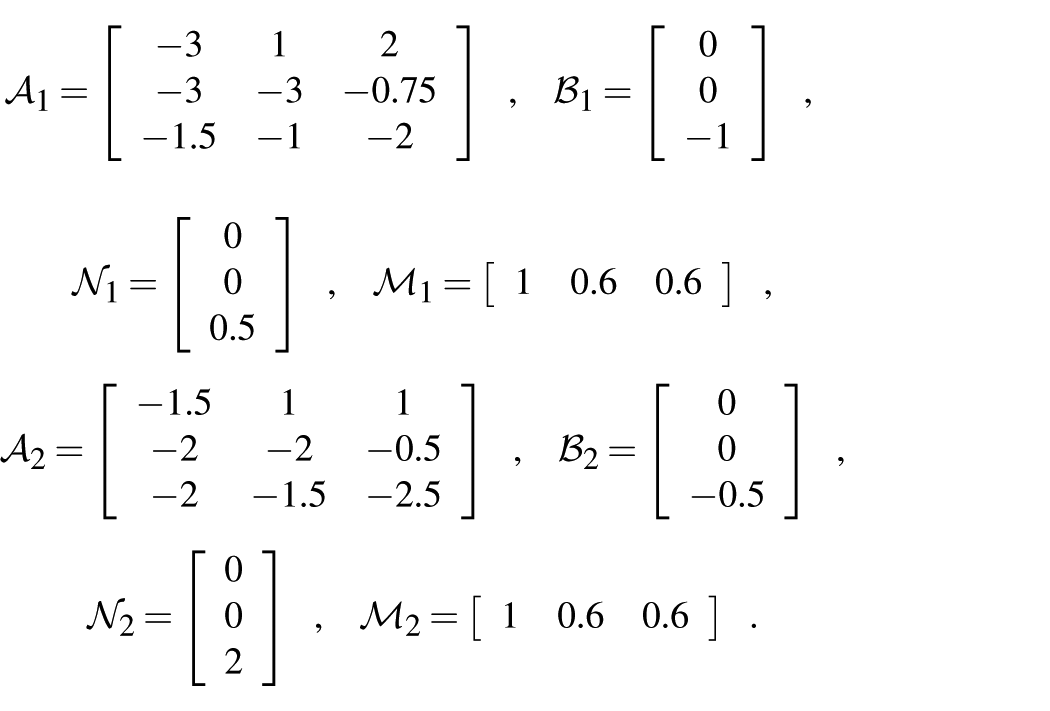
Mode 1 emphasizes rapid tracking, utilizing a 1.0 control gain and high diagonal coefficients () for swift error attenuation. Conversely, mode 2 adopts an energy-efficient profile with the gain reduced to 0.5. Its disturbance sensitivity is quadrupled from 0.5 to 2.0, forcing the controller to handle a more vulnerable system state during external wind gusts.
The state-space representation for mode 1 is given by:
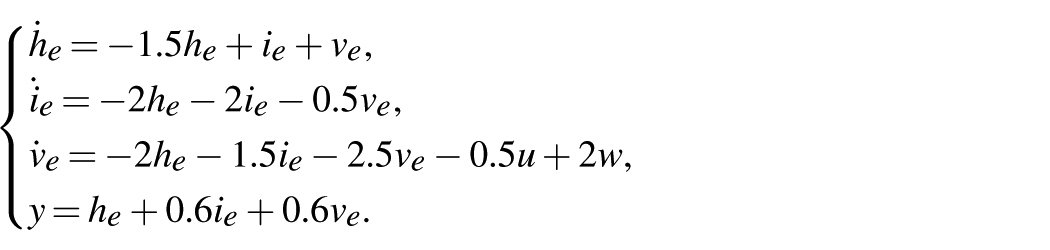
For mode 2, the corresponding dynamics are described by:
The state vector is defined as . The state-space matrices are consequently derived from the above equations as follows:
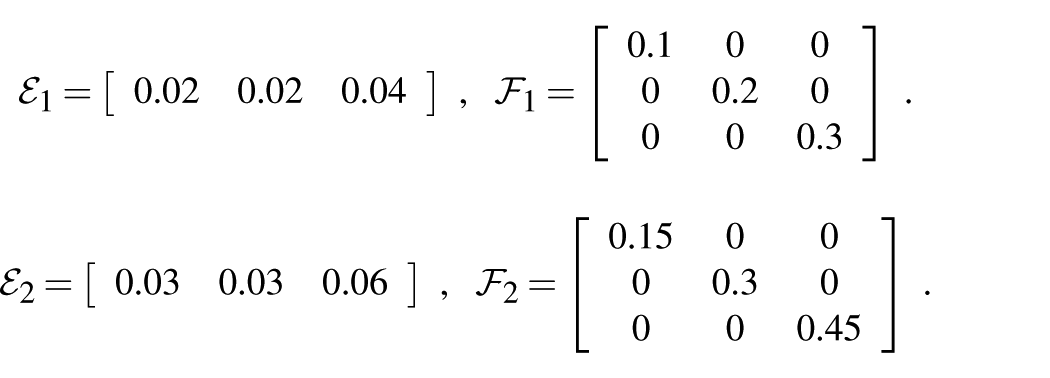
The design of the gain matrix characterizing the uncertainty in the state feedback matrix and is described as follows:
where , satisfying , with I being the identity matrix.
The modal transitions of the plant are dictated by a semi-Markov process, with its transition rate matrix defined as follows:
Assuming that the sojourn times of the modes follow distinct Weibull distributions, the probability density function (PDF) is given by:
where m represents the current mode, and and represent the shape and scale parameters, respectively. When , , and and when , , and , where, m denotes the condition, while k and λ are parameters.
When the sojourn time obeys a Weibull distribution with a high degree of confidence, it can be effectively bounded within the interval , satisfying . Under this distribution, the probability that a mode jump occurs within such an interval exceeds 0.99. The upper and lower bounds of the sojourn time are subsequently derived using the inverse CDF of the Weibull distribution, which is expressed as:
We take and to compute the 0.5th and 99.5th percentiles of h, respectively, which serve as the lower and upper bounds of the sojourn time. Thus, for mode 1, we obtain: , .
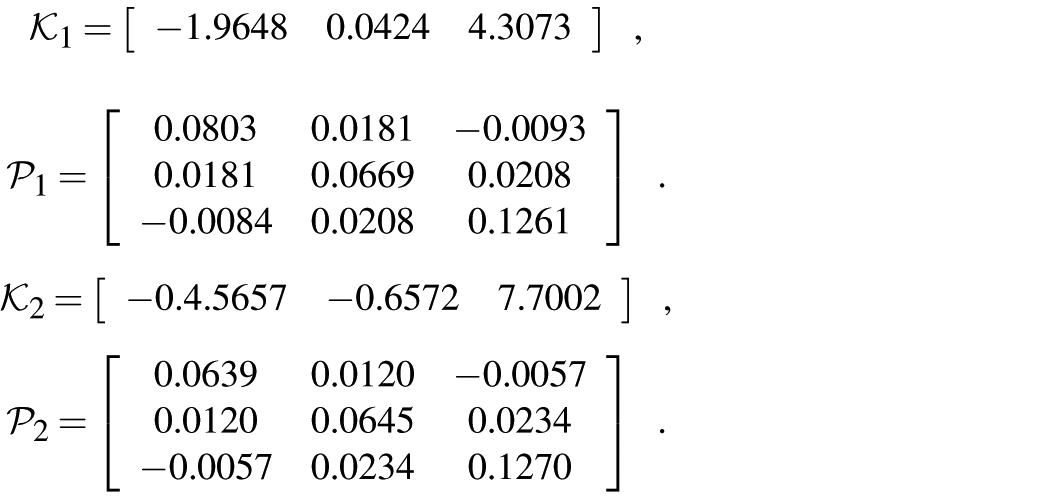
Assume the disturbance signal is given by , with other parameters set as , , , , , , , , , , and . The initial conditions of the system are . Furthermore, according to Theorem 2, the Lyapunov matrix and the state feedback matrix for the semi-Markovian resilient control system are obtained as follows:
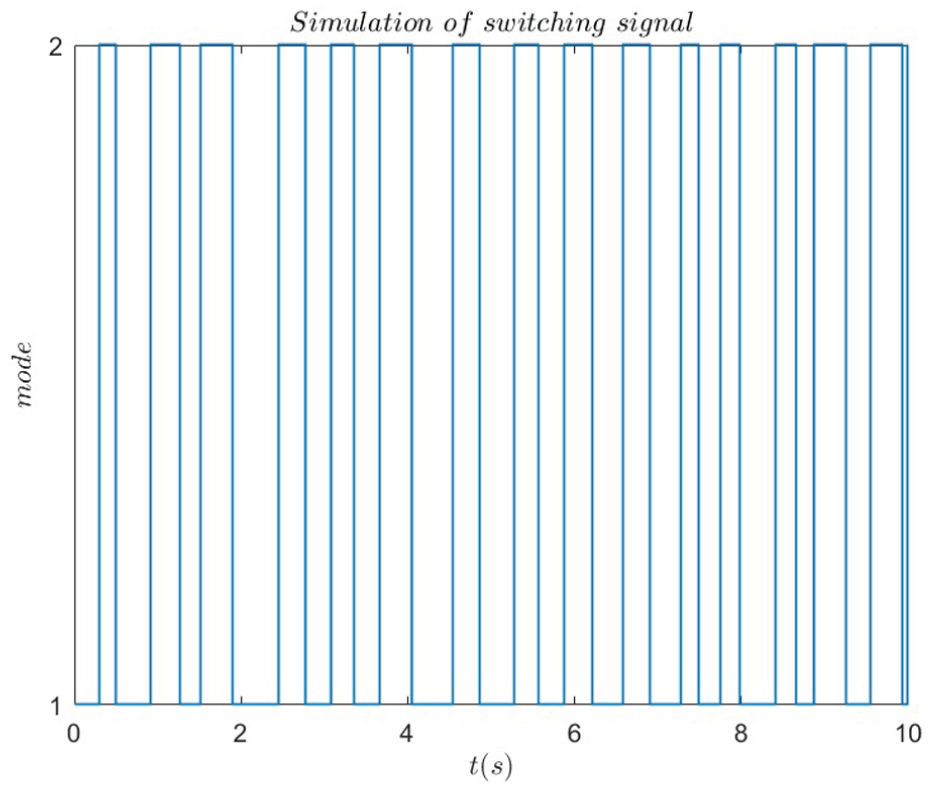
The simulation of the switching signal is given in Figure 1:
Simulation of switching signal.
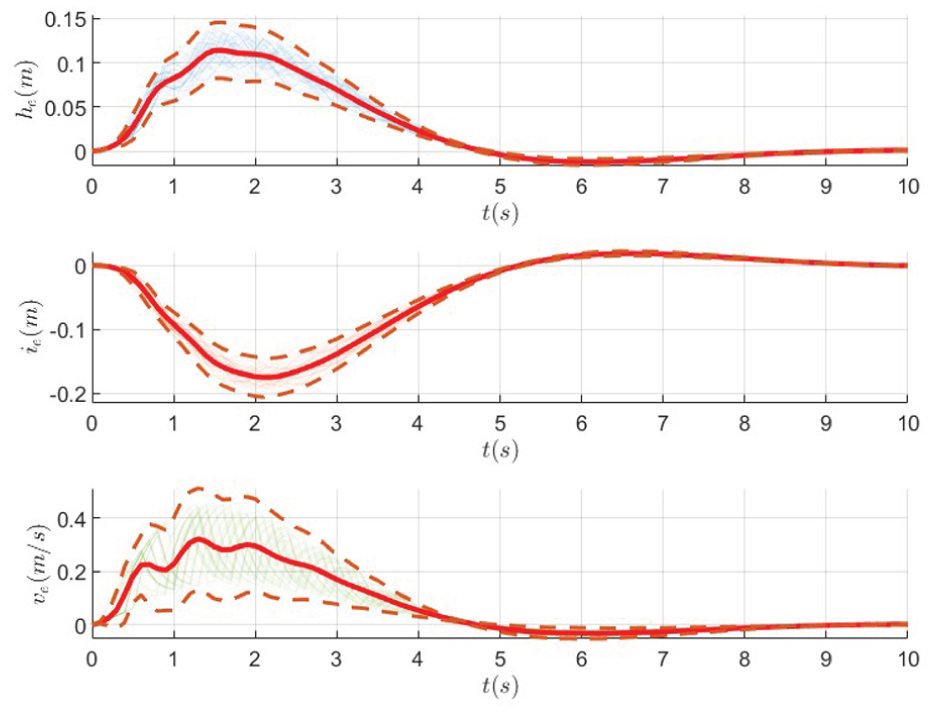
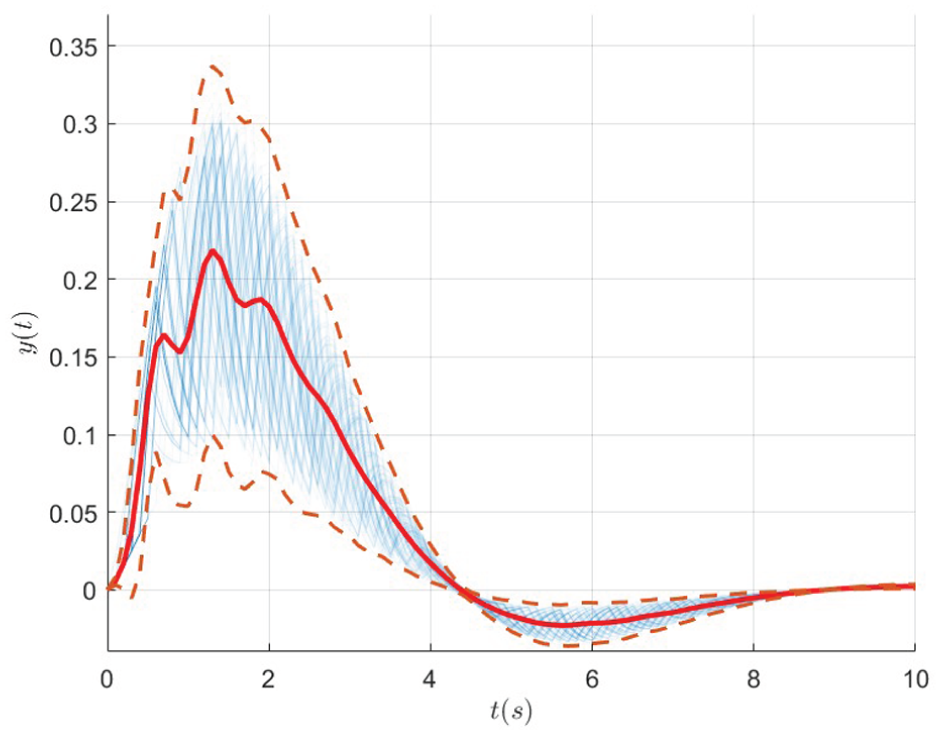
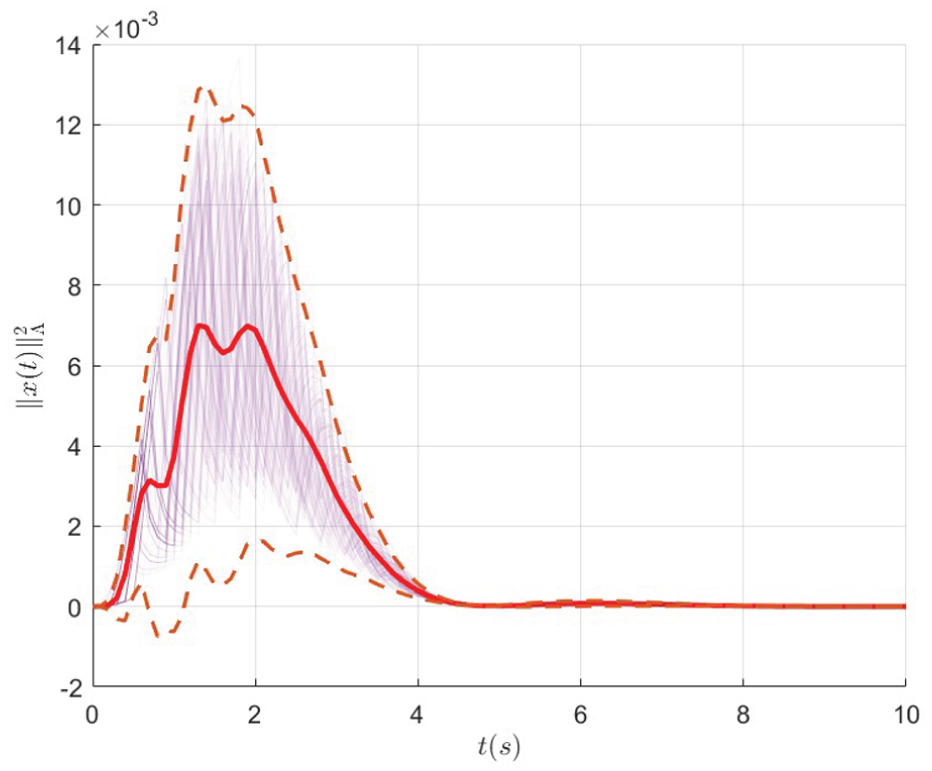
Figures 2–4 depict the evolution of the system states , , and ; the output ; and the quadratic form over a finite time interval through semi-transparent curves, representing 1000 independent Monte Carlo simulations. The red dashed lines delineate the upper and lower bounds of these trajectories, while the solid red curves represent their mean values.
The system states , , and from 1000 independent simulations.
The system states from 1000 independent simulations.
from 1000 independent simulations.
As illustrated in Figure 2, the altitude error, the integrated altitude error, and the vertical velocity error converge to and remain within a negligible neighborhood of zero during the finite-time interval .
As illustrated in Figure 4, at , the condition holds. Furthermore, for all , the inequality is satisfied, confirming that the system is finite-time bounded.
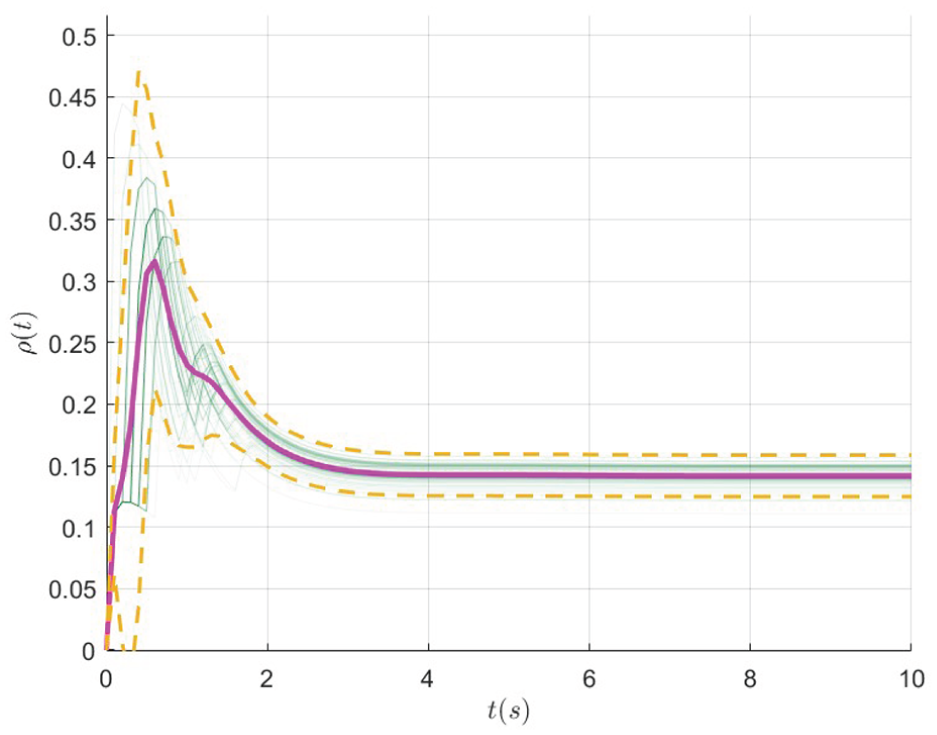
We define the function as follows:
denotes the function evaluating the - performance index. Through 1000 independent simulations, the average value is represented by the purple curve. It can be observed that within the finite-time horizon, remains below ρ, indicating that the system’s - performance satisfies the prescribed specifications.
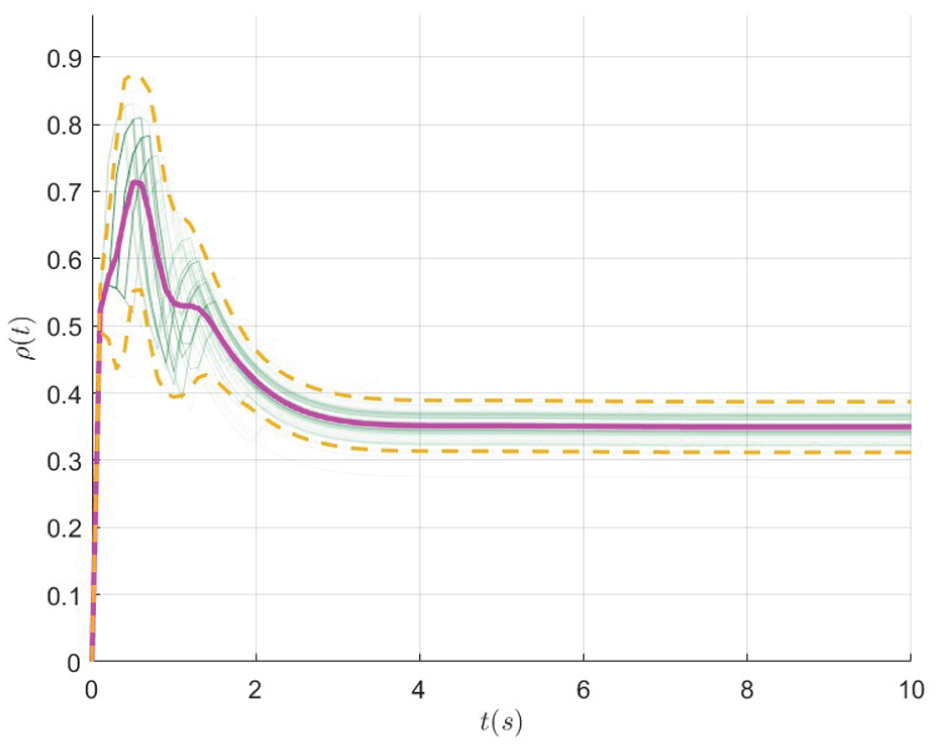
To highlight the improvement of the - performance under the resilient control scheme compared to the linear state-feedback control, the performance curve of linear state-feedback control is shown in Figure 6. The experimental results show that converges to 0.142 in Figure 5 and to 0.351 in Figure 6. It is evident that under the resilient control scheme, converges to a more conservative value with a faster settling time, demonstrating a significant enhancement in the system’s - performance.
from 1000 independent simulations under resilient control.
from 1000 independent simulations under close-loop control.
The simulation results confirm that the system’s robust performance stems from the dual-layer defense of the resilient controller. Specifically, the non-fragile term mitigates internal gain perturbations caused by environmental stress, while the - criterion suppresses the peak impact of external gust disturbances. This integrated mechanism ensures tight error bounds and swift autonomous recovery, even under the complex modal transitions and disturbances presented in this study.
Conclusions
This study is devoted to the finite-time - boundedness problem of SMJSs. Resilient controllers are designed to achieve the desired performance. By incorporating uncertainties into the controller structure, the - performance index is improved and driven to a lower value. First, sufficient conditions for stochastic boundedness are derived, ensuring that the SMJS is finite-time bounded despite norm-bounded disturbances. Second, mode-dependent resilient controllers are designed, accounting for uncertainties in the state feedback gain and state variations dictated by the SMJS, to stabilize the uncertain closed-loop system. Furthermore, the – performance of the system is analyzed and guaranteed. The merits of the designed control strategy is finally confirmed by numerical studies on a quadrotor UAV altitude control model, where the solution to the derived LMI conditions is obtained via the MATLAB toolbox. Comparative simulations confirm the advantages of the resilient control strategy.
Footnotes
ORCID iDs
Li Zhu
Jun Huang
Lei Yu
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project is partially supported by National Science Foundation of China grant #62103295 and #62573308, and by Undergraduate Training Program for Innovation and Entrepreneurship, Soochow University #S202510285098.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
References
1.
BarlowRProschanFHunterL (1996) Mathematical Theory of Reliability. Society for Industrial and Applied Mathematics.
2.
CaoZRNiuYGSongJ (2020) Finite-time sliding-mode control of Markovian jump cyber-physical systems against randomly occurring injection attacks. IEEE Transactions on Automatic Control65(3): 1264–1271. https://doi.org/10.1109/TAC.2019.2926156
3.
ChenMLiY (2019) Model reference resilient control for the helicopter with time-varying disturbance. International Journal of Robust and Nonlinear Control29: 5095–5117. https://doi.org/10.1002/rnc.4665
4.
DingXLiH (2020) Finite-time time-variant feedback stabilization of logical control networks with Markov jump disturbances. IEEE Transactions on Circuits and Systems II: Express Briefs67(10): 2079–2083. https://doi.org/10.1109/TCSII.2019.2949558
5.
DoratoP (1961) Short time stability in linear time-varying systems. In: Proceedings of the IRE international convention record part, New York, 9 May 1961, pp.83–87.
6.
GriffoAWangJ (2012) Modeling and stability analysis of hybrid power systems for the more electric aircraft. Electric Power Systems Research82: 59–67. https://doi.org/10.1016/j.epsr.2011.08.017
7.
HarishSMichaelG (2018) Relaxed autonomously switched hybrid system approach to indirect multiphase aerospace trajectory optimization. Journal of Spacecraft and Rockets55(3): 611–621. https://doi.org/10.2514/1.A34012
8.
HeHQiWLiuZ, et al. (2021) Adaptive attack-resilient control for Markov jump system with additive attacks. Nonlinear Dynamics103: 1585–1598. https://doi.org/10.1007/s11071-020-06085-5
9.
LiCXuRLiuZ, et al. (2025) Adaptive finite-time neural control for uncertain Markov jump systems with actuator faults. Circuits, Systems, and Signal Processing44: 03074. https://doi.org/10.1007/s00034-025-03074-0
10.
LiuQXuSLuC (2020) Early recognition of driving intention for lane change based on recurrent hidden semi-Markov model. IEEE Transactions on Vehicular Technology69(10): 10545–10557. https://doi.org/10.1109/TVT.2020.3011672
11.
MahmoudMJiangJZhangY (2001) Stochastic stability analysis of fault-tolerant control systems in the presence of noise. IEEE Transactions on Automatic Control46(11): 1810–1815. https://doi.org/10.1109/9.964697
12.
PanKYangFFengZ, et al. (2023) Attack estimation-based resilient control for cyber-physical power systems. Transactions of the Institute of Measurement and Control45: 886–898. https://doi.org/10.1177/01423312221122471
13.
PanSXieXZhuY, et al. (2024) Resilient and finite-time H∞ control of semi-Markov jump systems with both upper and lower thresholds of sojourn time. International Journal of Robust and Nonlinear Control34: 6542–6561. https://doi.org/10.1002/rnc.7284
14.
PangHGaoXLiC (2025) Robust finite-time passivity and stabilization of uncertain switched nonlinear system with no finite-time passive subsystems. Transactions of the Institute of Measurement and Control. Epub ahead of print 29 July. https://doi.org/10.1177/01423312251344662
15.
QiWZongGZhengWX (2021) Adaptive event-triggered SMC for stochastic switching systems with semi-Markov process and application to boost converter circuit model. IEEE Transactions on Circuits and Systems I: Regular Papers68(2): 786–796. https://doi.org/10.1109/TCSI.2020.3036847
16.
QiWHZongGDAhnCK (2022) Input-output finite-time asynchronous SMC for nonlinear semi-Markov switching systems with application. IEEE Transactions on Systems, Man, and Cybernetics: Systems52(8): 5344–5353. https://doi.org/10.1109/TSMC.2021.3122965
17.
QiuLTengJChenR, et al. (2025) Robust control strategy for networked semi-Markov jump system with random delay. International Journal of Robust and Nonlinear Control35: e7855. https://doi.org/10.1002/rnc.7855
18.
RanGTLiuJLiCJ (2023) Finite-time filtering for fuzzy nonlinear semi-Markov jump systems with deception attacks and a periodical transmission. Journal of the Franklin Institute360(16): 12576–12597. https://doi.org/10.1016/j.jfranklin.2021.07.055
19.
SangHZhaoJ (2022) Finite-time H∞ estimator design for switched discrete-time delayed neural networks with event-triggered strategy. IEEE Transactions on Cybernetics52(3): 1713–1725. https://doi.org/10.1109/TCYB.2020.2992518
20.
ShenHZhangZLiF (2024) Non-fragile H∞ control for piecewise homogeneous hidden semi-Markov Lur’e systems. IEEE Transactions on Circuits and Systems II: Express Briefs71(1): 306–310. https://doi.org/10.1109/TCSII.2023.3300096
21.
ShiYZhaoJSunX (2021) A bumpless transfer control strategy for switched systems and its application to an aero-engine. IEEE Transactions on Industrial Informatics17(1): 52–62. https://doi.org/10.1109/TII.2020.2979736
22.
SunJHuYChaiY (2015) l∞ event-triggered networked control under time-varying communication delay with communication cost reduction. Journal of the Franklin Institute352: 4776–4800. https://doi.org/10.1016/j.jfranklin.2015.07.016
23.
WanCYangZZhangD, et al. (2018) Resilience in transportation systems: A systematic review and future directions. Transport Reviews38(4): 479–498. https://doi.org/10.1080/01441647.2017.1383532
24.
WangJZhangYSuL (2022) Model-based fuzzy Ly–L∞ filtering for discrete-time semi-Markov jump nonlinear systems using semi-Markov Kernel. IEEE Transactions on Fuzzy Systems30(7): 2289–2299. https://doi.org/10.1109/TFUZZ.2021.3078832
25.
WangJMMaSPZhangCH (2019) Finite-time H∞ control for TS fuzzy descriptor semi-Markov jump systems via static output feedback. Fuzzy Sets and Systems365: 60–80. https://doi.org/10.1016/j.fss.2018.04.001
26.
WangYXiaYShenH, et al. (2018) SMC design for robust stabilization of nonlinear Markovian jump singular systems. IEEE Transactions on Automatic Control63(1): 219–224. https://doi.org/10.1109/TAC.2017.2720970
27.
WeissLInfanteEF (1967) Finite time stability under perturbing forces and on product spaces. IEEE Transactions on Automatic Control12(1): 54–59
28.
XiaYLiMShiP, et al. (2017) Finite-time stability for networked control systems with communication delays and packet dropouts. Transactions of the Institute of Measurement and Control39(9): 1421–1431. https://doi.org/10.1177/0142331215624400
29.
XieLFuMde SouzaCE (1992) H∞ control and quadratic stabilization of systems with parameter uncertainty via output feedback. IEEE Transactions on Automatic Control37(8): 1253–1256. https://doi.org/10.1109/9.151120
30.
XuZWWuZGSuHY (2020) Energy-to-peak filtering of semi-Markov jump systems with mismatched modes. IEEE Transactions on Automatic Control65(10): 4356–4361. https://doi.org/10.1109/TAC.2019.2955014
31.
YaoKChenKMaoC, et al. (2021) Optimal switching frequency variation range control for critical conduction mode boost power factor correction converter. IEEE Transactions on Industrial Electronics68(2): 1197–1209. https://doi.org/10.1109/TIE.2020.2969111
32.
ZhangLLengYColaneriP (2016) Stability and stabilization of discrete-time semi-Markov jump linear systems via semi-Markov Kernel approach. IEEE Transactions on Automatic Control61: 503–508. https://doi.org/10.1109/TAC.2015.2438424