
Abstract
As the wind power penetration level has started increasing in the grid, it has become essential to employ wind turbine with frequency regulation capabilities. This has become a challenging issue for researchers working in the area of wind power integration and to seek solution to this problem. To date, a piecemeal approach has been adopted in various review papers in this area, hence lagging completeness. This article presents a comprehensive review of frequency control techniques, various grid codes, load frequency control involving wind power plant with and without frequency control technique and modification in design of wind turbines for frequency regulation. Particularly, load frequency control including wind power plant with and without frequency control techniques at wind turbine manufacturer’s level has not been considered for review so far. More than 100 research publications in the form of research papers, reports, guidelines, and standards on the state of the art in this area have been rigorously examined, critically reviewed with research gaps identified and presented in a systematic manner.
Keywords
Introduction
A balance between generation and load with system losses is required to keep frequency and tie-line power within the predefined value for satisfactory operation of a power system (Kundur, 1994). Power sectors are shifting towards renewable energy sources (RESs) due to constraints such as depletion of fossil fuels and stringent environmental issues. Global cumulative installed capacity of wind power for the last 11 years has been shown in Figure 1 (Global Wind Energy Council (GWEC), 2015; Renewables Global Status Report, 2016, 2017). India has achieved 32.84 MW of cumulative installed capacity of wind power by the end of December 2017 (MNRE, 2017). It can be seen from the data that wind power is one of the most prominent sources among all the RESs for meeting the ever-increasing power requirement. The wind power plant (WPP) has to be interfaced to the grid with the help of power converter devices. Thus, wind generator speed is decoupled from grid frequency and is not participating in frequency control services. Conventional synchronous generators are being replaced by WPPs as penetration of wind power increases and total inertia of the system has reduced. Hence, it makes the system more susceptible to disturbance. It has been reported that the maximum rate of change of frequency (ROCOF) and frequency nadir has increased with the wind power penetration level (WPPL) (Doherty et al., 2010; Lalor et al., 2005). As the wind power participation in total generation increases, it becomes indispensable to afford frequency support through wind power generation. Also, the cost of wear and tear of the speed governor is suggested to be added in ancillary services for revenue (Luo and Ooi, 2006). Research has recommended for providing ancillary services from WPPs to deliver improved frequency response and escalate its profit (Ela et al., 2014a, 2014b; Teng and Strbac, 2016).
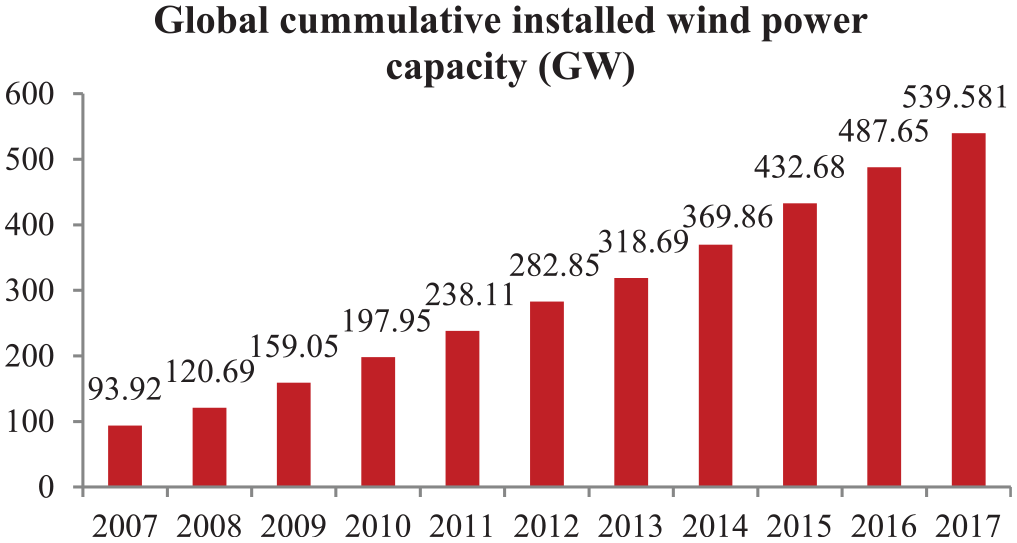
Global wind power status for the last 11 years.
Frequency control methods and grid codes have been reviewed in Sun et al. (2013) and Yingcheng and Nengling (2012); however, industrial developments in this area which are important for global wind energy participation have not been discussed. Further, the role of WPP with frequency regulation capability (FRC) in load frequency control (LFC) environment has not been explored since maintaining the grid frequency is compulsory for adequate operation of the power system. This article systematically reviews the research work on all aspects of frequency control strategies including inertial control (IC), droop control (DC), rotor speed control (RSC), pitch angle control (PAC), coordinated control (CC) as well as other techniques and highlights their contribution for improving frequency response. In addition, grid codes of different nations and industrial developments have also been deliberated. The future challenges and scope in this area have also been pointed out for further research.
Frequency control techniques
Up till now, the encouraging studies have been done by various renowned researchers around the world. In the journey of frequency regulation by WPPs and wind farm, the work done to date can be categorized as given in Figure 2.
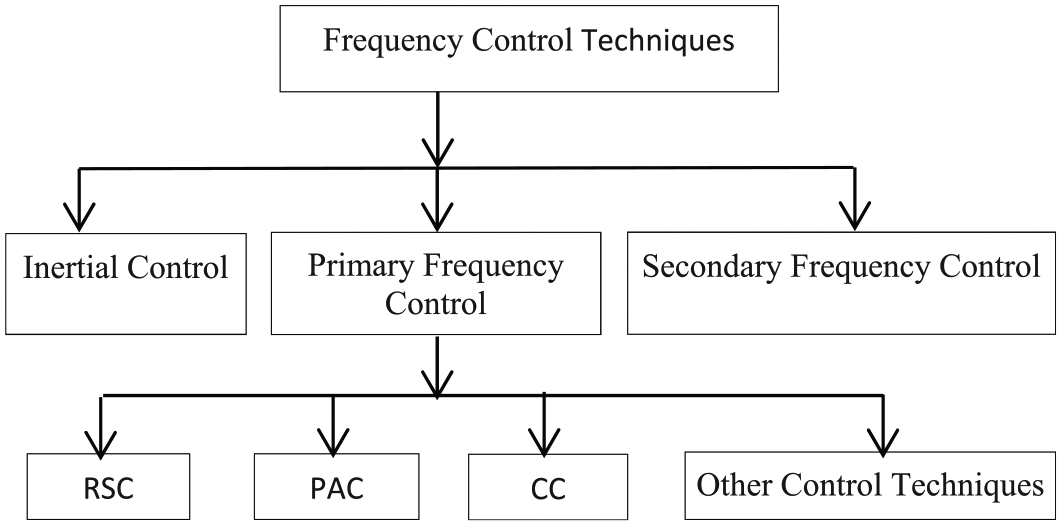
Types of frequency control techniques.
It is observed from the Figure 2 that frequency control techniques are categorized mainly in three parts, that is, IC, primary frequency control (PFC) and secondary frequency control. The contributions of various researchers in the frequency control area have discussed in the following subsections.
IC
Most of the literature has reported a supplementary loop for realizing inertial response (IR). The work done for mimicking IR by researchers has been summarized as follows:
Initially, Holdsworth et al. (2004) have introduced virtual IC by adding a torque signal that is proportional to the derivative of the frequency as shown in Table 1 and improves the ROCOF and frequency nadir. Further, it has been modified by adding DC signal. Both control strategies have been compared, and it has been established that droop controller is more advantageous over IC due to reduction in mechanical and electrical stresses (Morren et al., 2006). IC and DC have offered transient response and steady-state response, respectively, as reported in (Margaris et al., 2012). The authors have emulated IR by conjoining IC with DC and suggested to avoid differentiation of frequency for optimal IR as the optimal value of IC is reduced to zero (De Yver et al., 2016). Table 1 has presented the mathematical expression of IC and DC.
Control techniques.
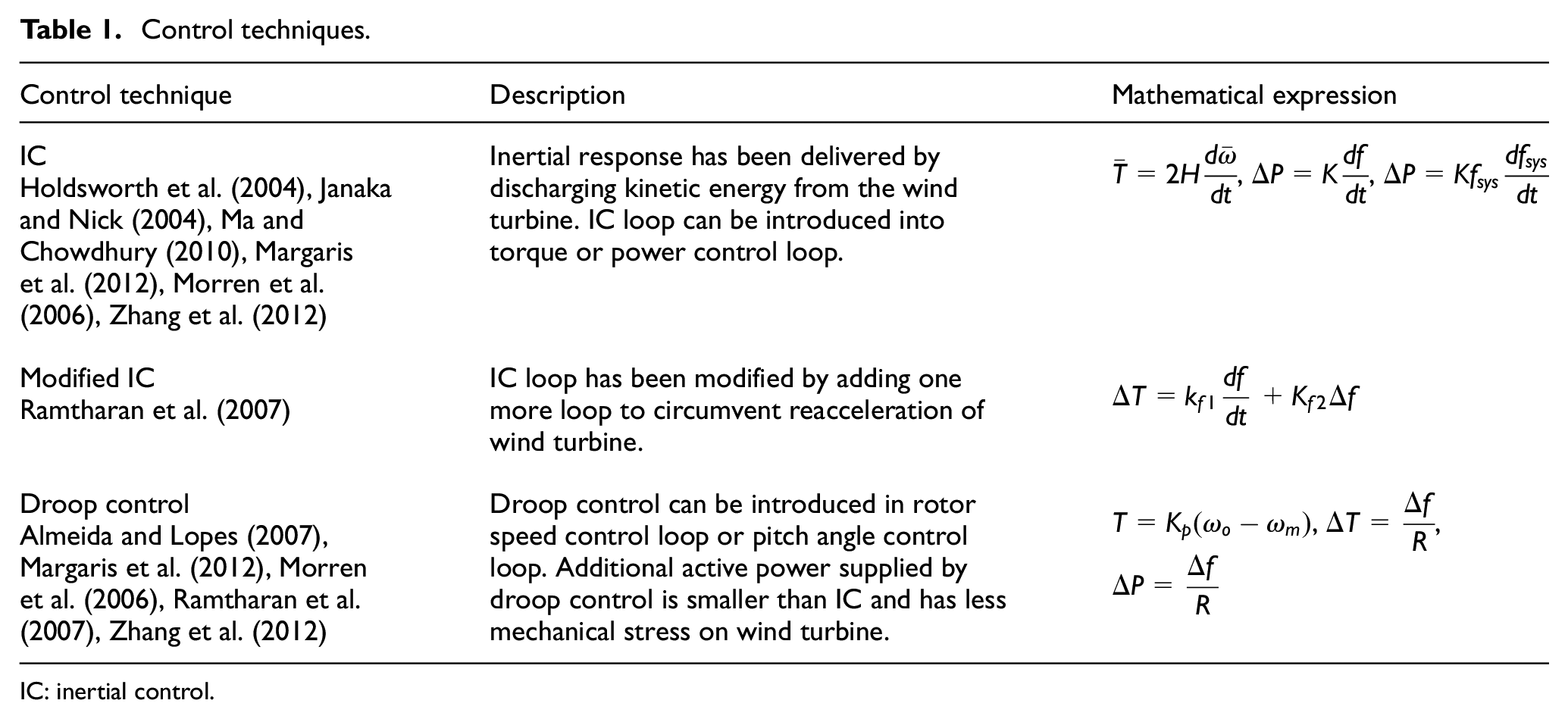
IC: inertial control.
Mullane and O’Malley (2005) have investigated the IR of doubly fed induction generator (DFIG) using field-oriented control which depends upon the bandwidth of the current controller. Mauricio et al. (2009) have modified the reference signal by using frequency deviation instead of frequency derivative for accelerating response from WPP. Nevertheless, the improved method requires interarea oscillations to be damp out. Conroy and Watson (2008) have underlined the frequency control of full converter permanent magnet synchronous generator (PMSG)-type wind turbine (WT) and observed temporarily overloading of WT at a higher speed. Subsequently, overloading of WT equipped with IC under the converter limit and supplementary loop parameters has been explored. It has been advised to reduce the power/torque for keeping rotor speed in its limit to avoid stalling of WT (Kayik and Milanovic, 2009). P. K. Keung et al. (2009) have proposed the control scheme for WPP that operates under optimum power capacity and kinetic energy (KE) storage at high wind speed, whereas at low wind speeds, KE is supplied using PAC. D. Gautam et al. (2011) have recommended supplementary control in addition to adjustment in pitch angle compensation and maximum active power order for converter so as to mitigate the impact of reduced inertia and improved IR during the transients. G. Delille et al. (2012) have recommended deployment of a fast responding energy storage system (ESS) with RES for improving IR and have validated it for French island of Guadeloupe for major generation outage (60%) with a high share of RES.
IR has been created by using rotating mass connected to the DFIG shaft with the help of a rotor speed controller or a supercapacitor connected to the DC link of a back-to-back inverter under different wind speed regimes (Fakhari et al., 2013). However, the DC link–based IC requires supercapacitor, DC/DC convertor and rerating of grid side convertor. Akbari and Madani (2014) have developed a methodology to reduce the high-order average frequency models of bulk power systems into the first order for estimation of frequency nadir and the corresponding time. It has been evident from simulation results that virtual damping has improved the frequency nadir significantly and the maximum ROCOF was predominantly affected by virtual inertia. Attya and Hartkop (2013) have explained a control scheme based on tuning of the tip speed ratio to estimate and control the amount of KE before and during frequency drop. Wu and Infield (2014) have applied the probabilistic approach to estimate the aggregate IR available from the operational wind generation capacity across the entire geographical area of the Great Britain power system projected for 2020 and reduced frequency nadir along with ROCOF. Arani and Mohamed (2015) have exercised torque and power DC for frequency regulation. Small-signal analysis has revealed that torque droop has offered higher stability margin as well as escorted for avoiding underspeeding. Wang et al. (2015b) have lifted the operating point of the turbine from maximum power point tracking (MPPT) curve to virtual inertia control curves according to frequency deviation and enriched the delivery speed of IR as well as upgraded power damping capability and stability of the power system. Lee et al. (2016) have suggested to modify the gain of IC according to the available KE. The inertial gain has increased for high KE and reduced for low KE. Consequently, M. Hwang et al. (2016) have modified the gain of inertial and droop control with the help of different shaping functions for achieving stable operation. Sonkar and Rahi (2017a) have reported reduction in frequency nadir with increasing WPPL and decreasing droop parameter.
Wang et al. (2017) have investigated frequency-based IC and torque limit–based inertial control (TLIC) techniques with the help of FAST simulator. The results show the capability of TLIC technique to enhance the active power in high wind speed region as well as adequate performance under wind gusts. Improved IC has been proposed which has been formulated by using rotor speed, frequency of power system and frequency of rotor current. This control has been compared with traditional IC and combination of inertial and droop control. It has proved its effectiveness in terms of maximum instantaneous frequency deviation (Ocho and Martinez, 2017). The simplified model of DFIG has been employed for the study of the frequency response from the DFIG. The MPPT curve shifted to the optimum power point tracking curve has been obtained by the frequency deviation and its derivative. The simulation results have exhibited the reduction in frequency deviation (Teng and Meng, 2017).
It has been observed that IC offers short-term frequency response and reduces the ROCOF. In addition, it has fast response time and does not affect the annual power production. IR has the dependency upon the wind speed, IC gain, WPPL and overloading capability of generator and convertor. However, the limit on wind speed and output power has bounded IR. Hence, power reserve is required for frequency support in long term during generator outage. It can be accomplished by deloading of WT that has been explored in the next subsection.
PFC
Primary frequency response (PFR) has been simulated predominantly with the help of power reserve offered by deloaded operation of WT. The contributions of the researchers have been highlighted as given below.
PAC
Extracted power from wind is inversely proportional to the pitch angle. When frequency drops, pitch angle is required to be decreased and vice versa. The various research publications have deliberated on PAC technique and their contribution.
L. Holdsworth et al. (2004) have investigated PAC to provide frequency support from fixed speed induction generator and DFIG and displayed frequency response using angular momentum and damping. T. Senjyu et al. (2006) have levelled output power of wind turbine generator (WTG) in all operating regions with the help of generalized predictive control–based PAC along with fuzzy logic–based standard deviation of wind speed that has smooth output power under quick wind speed variation and wind shear. Subsequently, R. M. Kamel et al. (2009) have maintained the level of WT output power by PAC in micro-grid for improving the dynamic response in the islanding mode. Further, it has been explained that high fluctuations in WT output power due to wind speed variations lead to fluctuations in frequency and voltages of the MG during islanding mode. T. Goya et al. (2011) have introduced H∞ control–based droop controller for parallel operated battery systems along with WTs and have improved the transient characteristics in addition to robust stability against noise in comparison to conventional DC.
RSC
The power reserve margin can be maintained by the left half or right half sides of power speed curve, but the RSC is preferred to operate in the right half due to stability reason (Ma and Chowdhury, 2010). The implementation of RSC by different researchers has been reported in this subsection.
An optimal dispatch control scheme based on deloaded maximum power extraction curve has been demonstrated for delivery of active and reactive power of DFIG in wind park according to the demand of operators. The operating point of powers has been determined by the primal–dual predictor–corrector interior-point method. PAC and RSC have been processed for regulating active power (Almeida et al., 2006; Almeida and Lopes, 2007). G. Ramtharan et al. (2007) have enforced RSC for the rotor speed below than 1800 r/min and PAC at 1800 r/min for yielding deloading of DFIG. Consequently, active power from WPP has been optimized by adjusting droop parameter of individual WTG that depends on accessible power margin and has delivered smooth operation during low wind speeds (Vidyanandan and Nilanjan, 2013). However, the actual percentage of deloading is limited by available wind speed and rotor speed limit. Fuzzy-deloading and fuzzy-droop control has been suggested and offered adequate PFR (Pradhan and Bhende, 2016). H. Ye et al. (2016) have obtained the inertial constant and power reserve from wind speed and rotor speed. Also, frequency controller gains have been evaluated analytically in order to keep WT in operational limits.
The fuzzy logic–based frequency control scheme for WPP with energy system has been investigated and has reduced the ROCOF as well as frequency nadir in Zhang et al. (2016). The combination of DC, torque feedback control and power reserve has been exercised for enhancing the PFR. However, the controller’s parameters are needed to be tuned for desired response in Tan et al. (2016). Zadeh et al. (2017) have proposed the fuzzy-based speed controller for DFIG along with auxiliary frequency controller and have utilized the particle swarm optimization (PSO) for determining the parameter of speed controller. The proposed speed controller has proven its robustness against wind speed measurements. It has been suggested to consider the rate of speed variation at the time of injection of power and recovery period as these parameters have impact on frequency nadir and recovery time.
CC
Rotor speed exceeds the maximum limit in medium and high wind speed during deloading. Three operating wind regimes have been defined to avoid the hitting speed limit as low, medium and high wind speed according to control goal (Zhang et al., 2012). The CC has been introduced by various researchers under the above-defined speed considerations. The other coordinated methods have also been presented in literature considering stochastic nature of the wind and other issues. The contributions in this area have been discussed as given below:
N. A. Schinas et al. (2007) have coordinated PAC with inverter control to supply mixed load in an isolated system and reduced frequency nadir under a wide range of wind speed. The inverter control keeps the load voltage constant, while fuzzy logic–based PAC supplies the power according to load. Chowdhury and Ma (2008) have exercised a combination of PAC with RSC for delivering frequency regulation. Further, the combination of IC and PAC has been compared to RSC, and it has been revealed that RSC is superior to PAC in terms of quick response along with rotor speed limitation (Ma and Chowdhury, 2010). Mokadem et al. (2009a, 2009b) have attempted torque control to keep power reserve which cannot ensure it for all wind speeds due to dependability on wind speed forecast. Therefore, authors have been suggesting fuzzy logic–based multivariable supervisory control by coordination between torque control and PAC to maintain primary reserve overall speed regimes without wind speed measurement along with an evaluation of power reference in real time and validated by performing experiments on 2.2-KW test bench.
DC in rectifier loop and PAC have been synchronized for controlling power flow through high-voltage direct current (HVDC) link and line commutated converter–based HVDC system to yield IR as well as PFR (Fan et al., 2009; Miao et al., 2010). PAC has been employed to maintain the rated power at high wind speeds, whereas modified linear slope control has been utilized for low wind speed condition to keep rotor speed in the specified limits. However, both controllers have been employed in medium wind speed. Further, power margin has been maintained by moving average with the K-deviation method, and also, variance decision control has been utilized for coordination between the system operator and DFIG power commanding system (Chang-Chien et al., 2011; Chang-Chien and Yin, 2009).However, Zhang et al. (2012) have defined aforementioned wind speed regime by a different method and have illustrated the coordination control scheme between IC, RSC, and PAC that has offered least frequency nadir for all wind speed zones.
Žertek et al. (2012) have optimized deloading operating point with respect to KE stored in rotating mass to reduce deloading margins and have saved energy in the range of 1.16% to 2.79% in comparison to traditional deloaded scheme. Jazaeri and Chitsaz (2012) have demonstrated a control plan comprising PAC, dump load and flywheel storage system along with a coordination unit for an isolated system. The CC unit coordinates between PAC and dump load in order to overcome the degradation in efficiency due to dump load. Jafarnejadsani et al. (2013) have investigated adaptive control based on radial basis function neural network incorporated for PAC and torque control. They have shown the robustness of proposed controller against uncertainties. Zhang et al. (2013a) have preferred feedback loop in stator voltage for producing frequency response and suggested to synchronize the different DFIGs to a common frequency in DC for sharing the load. Singh et al. (2013) have achieved IR and PFR by preparing constant power reserve and proportional power reserve margin with the help of PAC and power converter control simultaneously. The impact assessment of participation of DFIG WT on frequency regulation has been presented for IC and PFC separately for maximum 40% WPPL. Later, both controllers have been combined and tested for maximum 50% WPPL and, further, extended for 80% WPPL. It has been concluded from the results that the frequency nadir value has been amplified with WPPL and has concentrated with combined IC and PFC (Gevorgian et al., 2015; Singhvi et al., 2013; Zhang et al., 2013b). Dang et al. (2014) have focused on the combination of ESS with PAC and speed governor control to diminish the effect of wind speed along with load variation on frequency for a hybrid system. Y. Fu et al. (2017) have combined IC and PFC to deliver frequency response from DFIG. The IR has been obtained by optimizing MPPT curve and the PFC realized by introducing droop parameter in PAC. The simulation results have demonstrated the reduction in settling frequency deviation along with IR.
Other controls
There are other methods for producing frequency response from WPP which have been briefly overviewed as follows:
Ullah et al. (2008) have reported temporarily available excess active power concept to provide PFC. WT can provide extra 0.1 pu of active power for more than 10 s easily without hitting the minimum speed limit. Nevertheless, second dip has been observed in recovery period because of WT consuming power from grid due to subsequent acceleration period. Gowaid et al. (2011) have diminished this dip by incorporating the deloading method with temporary over-wind generation technique. Wu et al. (2017) have proposed the coordination between torque limit control and battery ESS for circumventing the second dip of frequency. The improvements in frequency nadir and settling time have been evident in simulation results.
Silva et al. (2012) have suggested to create IR and PFR through cascaded control structure which transforms the onshore grid frequency into multi-terminal high-voltage direct current (MTDC) voltage variation in order to control offshore wind farm ac grid frequency. Wang et al. (2013) have applied the IC and PFC via DC to a WT for the Guadeloupe system with full and partial load. The authors have recommended tuning of controller gain or reducing rate of change of wind power for better FR. Xu et al. (2015) have controlled the frequency by regulating the voltage profile and demand of electrolytic aluminium load according to power imbalance with the help of wide area measurement system for the isolated system. Li et al. (2014b) have synchronized RSC and PAC with DC link voltage control. The combination of PAC and RSC has avoided hitting speed limit, whereas DC link voltage has controlled the power flow between source and load.
C. Li et al. (2014a) have proposed control strategy for short-term frequency support control (<10 s) by both the DFIG and the MTDC system where the MTDC system has been utilized for integrating offshore wind farms and distributing wind power to onshore utility power grids. Baccino et al. (2015) have investigated a control technique comprising model predictive control and Kalman filter (KF) estimation algorithm for the wind speed of each WT that reduces the frequency nadir. Gavriluta et al. (2015) have presented a combination of DC with dc bus signalling control for MTDC system with energy storage and has produced the standard solution. Wang et al. (2015a) have investigated the impact of intra-hour wind power variability on power reserve by using statistical method for the French island of Guadeloupe and have reported overestimation of power reserve due to ignoring intra-hourly variability in WG for the small isolated system.
PFC has reduced the frequency nadir as well as settling frequency in long term and has operated at a reduced energy level in case of deloading. PFR has shown dependency upon wind speed and type of deloading. In the case of RSC, the overspeeding deloading method has been preferred over the underspeeding deloading method due to better small-signal stability, better fault ride through capability and higher stored KE. Small-signal stability has verified that PAC has provided good stability in comparison to RSC but increases the wear and tear on the PAC and also has slow response time than RSC. Coordination between these methods as well as coordination between these methods with energy storage device has improved PFR and has also helped to keep the controllers within their limits.
Secondary frequency control
The balance control and delta control have been utilized to deliver the secondary frequency response from WPPs according to transmission system operator’s (TSO’s) command. Balance control depends upon the availability of wind power, whereas delta control maintains power margin for increasing power on demands of TSO (Hansen, 2010). Subsequently, Hansen et al. (2006) have addressed the design and implementation issues related to wind power control. Both controllers have been implemented together with power gradient limiter to provide secondary frequency response. Spudic et al. (2010) have suggested two-level controls following reference command. One is used to monitor mean speed and set overall plant output, whereas other supervise the local wind effect and regulate the operating power point according to the available power margin. Both inertial and primary controls have been used to respond to grid frequency deviations. Aho et al. (2013) have designed derating torque and primary response torque control to regulate active power according to manual power command, derating power set command and automatic frequency regulation below and above rated wind speed.
There is a lack of sufficient literature on secondary frequency control from WPPs and wind farm. Research can be reinforced in this area of secondary frequency control by wind farm or WPP with the help of power reserve. In addition, feasibility and reliability can be augmented in this case.
LFC including WPPs
The objectives of LFC are to keep frequency within its specified limit and to maintain the tie-line power within the nominal value. A number of researchers have designed load frequency controller for isolated and interconnected power system involving WPPs with and without frequency regulation techniques. The following subsections have summarized the work of various researchers.
LFC comprising wind WPP without frequency regulation techniques
T. S. Bhatti et al. (1997) have investigated PI-based continuous and discrete LFC for isolated wind diesel hybrid power systems with and without PAC. It has been observed from simulation results that the wind diesel or multi-wind diesel hybrid power systems with PAC scheme using continuous LFC have offered better dynamic performance.
Bevrani et al. (2010) have presented an improved LFC model considering RESs and have analysed the impact of incorporating RES into the power system. The simulation was conducted on IEEE 39 and 24 bus systems, and outcomes show that
Decentralized PSO-based fuzzy logic control has been illustrated for simultaneous minimization of system frequency deviation and tie-line power changes of multi-area power system considering high penetration of wind power. The PSO method has been utilized for tuning of fuzzy system’s membership function parameters in the supplementary frequency control loop. The system was tested on IEEE 10 generator, 39 bus test system, 10-machine New England Test Power System and aggregated model of West Japan Power System with experimental real-time implementation. The proposed controller results were considered better than conventional PI controller (Bevrani and Daneshmand, 2012; Bevrani et al., 2013).
Kumari and Jha (2013) have investigated automatic generation controller for multi-area thermal-wind-hydro power plants with PI controller. Proportional gain, integral gain, speed regulation parameter and frequency bias parameter have been optimized with PSO and gradient decent optimization (GDO) methods. The generation rate constraint has been considered for thermal unit. The results obtained from PSO have superior performance than GDO’s results. Sahoo et al. (2012) have exploited PI-based LFC for thermal, hydro and wind power plants. It has been concluded from the simulation results that more fluctuations result due to intermittent nature of RESs. The fuzzy logic LFC has been developed for two-area interconnected system with wind penetration, whereas fuzzy logic LFC including superconducting magnetic energy storage (SMES) unit with wind farm for two-area interconnected system has been designed with dead band and generation rate constraints. Fuzzy logic LFC has improved the performance of the system (Sheikh and Mondol, 2012; Zhou et al., 2014).
Two energy storage devices namely supercapacitor and zinc–bromine flow cell battery have been utilized to improve the frequency regulation of wind farm, whereas ESS with anti-windup saturation control has been suggested to overcome the effect of power limit of ESS. Wind farm with ESS has enhanced the system ability to participate in frequency regulation task that depends upon available energy in ESS and have reported improvements in frequency response (Antonishen and et al, 2012; Wu et al., 2012).
Verma and Kumar (2012) have implemented IC loop with frequency deviations instead of frequency derivative. Secondary controller has been realized by frequency-linked pricing signal which has determined the gain according to the frequency deviation and unintended unscheduled interchanges price signal. It has been concluded that the frequency-linked signal-based secondary controller offers better performance in comparison to PI-based secondary controller. Khousa and Ismail (2013) have recommended active disturbance rejection control (ADRC)-based LFC for single area as well as for three-area interconnected system with high wind power penetration. It has been authenticated from the simulation results that ADRC-based load frequency controller minimizes the effect of disturbances caused by load variation and wind power.
Hoseinzadeh and Chen (2013) have opted for fuzzy logic–based LFC for interconnected power system with WPP where WPP is equipped with inertial support combined with pitch controller. The proposed controller has been tested for PMSG-based WT connected to 9-bus IEEE standard test system and has provided better performance in either transient or steady state. Pandey et al. (2014) have illustrated iterative proportional integral derivative (IPID) H∞ for isolated interconnected system including reheat thermal plant, WPP, diesel, battery ESS, fuel cell and aqua-electrolyzer (AE). The IPID H∞ has been actuated for tuning of controller. The iterative linear matrix inequality approach has been exercised to tune parameter of PID controller under H∞ constraints. Sonkar and Rahi (2017b) have investigated modified PID load frequency controller for two-area interconnected system including WPP and reported reduction in frequency deviations and tie-line power deviation for internal model control–based modified PID.
WPP with frequency regulation techniques
Aziz et al. (2014) have proposed integration of WPP with inertial support in an interconnected multi-generation power system in this work. The integral time absolute error–type PI controller has been utilized for LFC, and simulation results have exhibited that LFC performance of control area having WPP incorporated with base load plant is better than the control area having WPP combined with peak load plant. Rosyadi et al. (2014) have designed LFC for multi-area interconnected system PMSG-type WPP with power frequency control capability offered by DC and integral control. The WPP with PFC has reduced the fluctuations in frequency of each area and tie-line power.
Nasiruddin et al. (2015) have investigated full state vector-based optimal automatic generation control (AGC) for two-area interconnected system incorporating identical thermal plants with non-reheat turbines with and without dynamic participation of DFIG-based WTs. It has been confirmed by the simulation results that the involvement of WPP has improved the dynamic performance of the system. Optimal AGC has been investigated for two-area hydro thermal system and thermal-thermal system with DFIG in each area interconnected via parallel AC/DC tie-lines and AC tie-line, respectively, by using two methods, namely, full state vector feedback control and output state vector feedback control. It has been concluded from simulation results that output state vector feedback control is better than full state vector feedback which has been supported by eigenvalue analysis (Sharma et al., 2015).
Dahiya et al. (2015) have suggested implementation of PAC, inertial and drooping control for WPP to enhance the frequency control and tie-line power control for two-area interconnected system. Simulation results have illustrated that gravitational search algorithm–based controller has provided better performance than ant colony optimization and genetic algorithm–based controllers. Sonkar and Rahi (2016a, 2017c) and Sonkar et al. (2016b) have reported the reduction in frequency and tie-line power deviations with IC and combination of inertial and droop control for the two-area interconnected system. The CC in LFC environment has been investigated and has shown more reduction in frequency and tie-line power deviation than IC and combination of inertial and droop control for all three wind speed regime (Sonkar and Rahi, 2017d).
Grid codes
As the wind power participation reaches a substantial level, grid codes are required to be updated by power grid utilities and regulatory agencies to maintain grid discipline.
Great Britain code has made it mandatory for all wind farms to provide primary, secondary and high-frequency response. The generator should be proficient to provide secondary response and high-frequency response within time interval of 30 s–30 min and 0–10 s, respectively. Due to stochastic nature of wind, additional reserve should be kept to 1.6% of installed capacity (National Grid Company PLC, 2006). Wind farm, whose rating is greater than 10 MW, needs to reduce large- and short-term frequency deviation according to Hydro-Quebec grid code (Hydro-Québec, 2005). Philippines grid code states that wind farm should employ active power control schemes to retain frequency within the range of 59–61 Hz. Wind farm should produce maximum active power in case available primary resource is less than the operator’s set point for frequency (Philippine Grid Code, 2016). According to the German grid code, PFC band must be ±2% of rated power. The required power output should be generated uniformly in 30 s and must be continued for at least 15 min within this specified band. WTs should also be equipped with adjustable droop characteristics. TSOs in Germany must be stipulated for a linear reduction of 40% of available power from WTs for every hertz frequency above 50.2 Hz (E.ON Netz GmbH, 2006; Tennet TSO GmbH, 2012). Referring the Danish grid code, WPPs must be employed for APC via set point with a minimum accuracy and resolution of ±10 MHz and 1 KW, respectively. The control must be started after 2 s of frequency deviations detection and be completed within 15 s (Energinet.dk., 2015). The Spanish grid code states that WTs must have 1.5% reserve margin to participate in PFC by deloaded control (Langniss, 2010). Referring to the South African grid code, WPPs must have the capability to reduce the power output within the accuracy of ±10 MHz for increment in frequency above 50.5 Hz. Droop characteristics should be adjustable between 0% and 10%. At least 3% power reserves must be there in the system to perform delta power control (South Africa Grid Connection Code, 2014). Germany, Great Britain, Spanish, Ireland, South Africa (SA) and Danish grid codes have been summarized in Table 2.
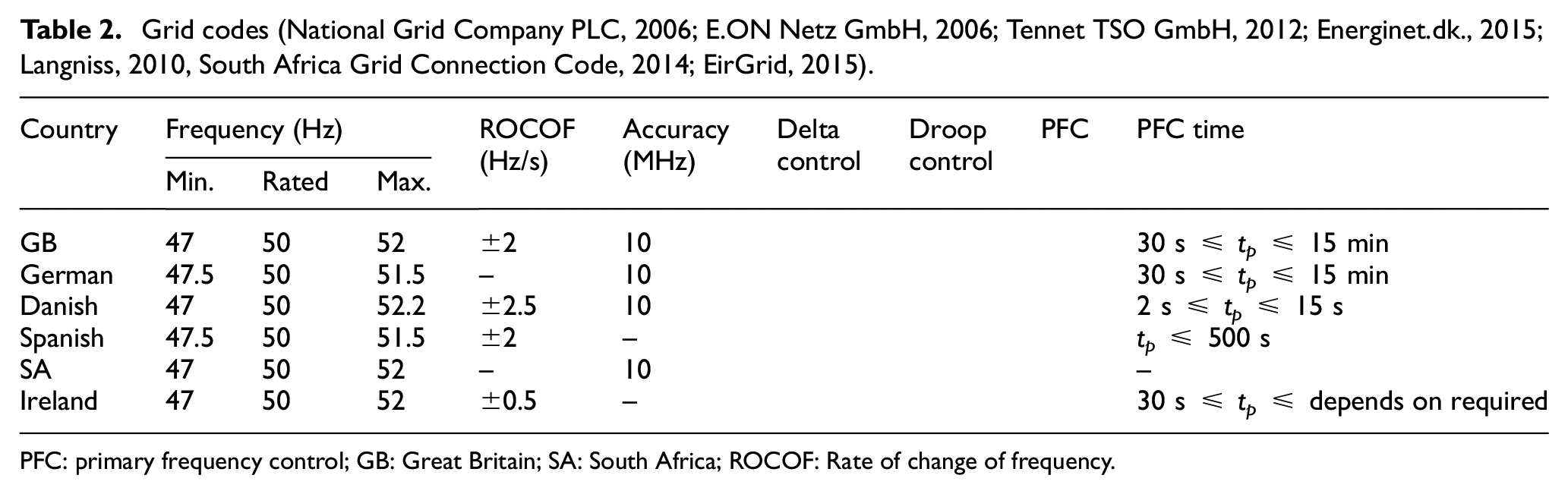
PFC: primary frequency control; GB: Great Britain; SA: South Africa; ROCOF: Rate of change of frequency.
Indian grid code states that the wind farm should have the tolerance range from 47.5 to 51.5 Hz and have the capability to reduce the active power of wind farm above nominal frequency. Moreover, the wind farms having high voltage rating (66 kV) should have the ability to change its active power output according to operator request (C-WET, 2009).
Industrial developments at WT level
Various WT manufacturing companies have developed wind power generator with extra features so as to help WTs to regulate active power in order to produce frequency response.
GE company has owned the WindINERTIATM control which regulates the turbine output between 5% and 10% over the wide range of wind speed and has power pluses for keeping turbine within operational and design constraints. Also, WindCONTROL® function provides PFC, inertial emulation and controlled power set-points in GE turbine (GE Energy, 2010). Moreover, GE has added battery storage system that can be utilized for frequency regulation (GE Power and Water Renewable Energy, 2013). Siemens Company has proposed NetConverter® System that is suitable for variable-speed full-converter WPP. It offers power output control, ramp rate control, frequency droop governor control, spinning reserve and frequency dependent DC (Nelson, 2011). Also, the same company has facilitated IR and local frequency response in wind turbine of SWT model series (Siemens, 2016). ABB Company (Seman and Sakki, 2011) has set up a coordinated frequency control consisting of RSC and PAC. In addition, direct torque control has been designed for fast response and damping control. ENERCON GmbH Company (2015) has developed a control that is capable of regulating output in terms of grid frequency according to operator’s specifications. A utility company, Xcel Energy, has shown that whenever the area control error (ACE) is directly applied to the WPP, it has afforded fast frequency regulation and offers ACE compliance (Bartlett, 2013). Senvion Wind Energy Solution Company (2014) has incorporated active power control from WT for both underfrequency and overfrequency events.
Challenges and future scope
As the share of wind power is increasing, the demand of frequency support from WPPs becomes a debatable topic. Although significant work has been done, still there are following issues which are required to be addressed.
Application of optimization techniques
Optimization techniques have a wide application in various fields, for instance, AGC, power quality improvement, image processing and so on. WPPs are working at a reduced power level due to power margin concept which is predominantly realized for delivering PFR. It is required to optimize the power margin in order to save energy and maximize profit from WPPs.
The gain of supplementary control loop and droop parameter has been taken constant in majority of the literature reported so far. However, it has significant impact on frequency response; limited literature is available on this concept, and this can be explored further to produce smooth frequency response.
CC
WPP cannot provide power in continuity as wind is intermittent in nature. To overcome this issue, many researchers have suggested energy storage devices. However, the high cost of these devices and its lifetime is another issue. Therefore, there must be some algorithm suitable for CC between energy storage devices and frequency control methods of WPP for all three wind speed regions. Another option could be the controlled load that can be coordinated with energy storage device or frequency control methods for providing frequency support during underfrequency events and scarcity of wind power.
Economic analysis
Ancillary services being offered by WPPs can be a key feature in the direction of maximizing revenue from WPPs. However, limited literature is available on economic analysis related to WPPs offering ancillary services. Therefore, detailed economic analysis is required to be performed for getting a real picture of profit or loss by providing ancillary services from WPP. Further, economic issues regarding power reserve have not been fully explored in the available literature.
Conclusion
A comprehensive review of the various frequency regulation techniques by WPP to enhance the stability of the power grid has been presented in this article for the benefit of researchers, manufactures and working engineers in this area.
According to the review, it has been concluded that IC and PFC of WT have improved the ROCOF and frequency nadir. It has also reduced the frequency and tie-line power deviation in AGC.
In majority of the literature, PFR has been obtained by deloading technique of WPP with the help of PAC or RSC or both according to wind speed zones. The overspeeding control technique has been suitable for low and medium wind speed zone, whereas PAC has appropriate choice for high wind speed zone.
Ireland, GB and Spanish grid code supports power reserve for PFC. Therefore, power reserves are essential for strong grid operator in the upcoming years.
The grid codes of different countries and industrial organizations have supported frequency regulation by WTs to augment stability and reliability of the grid.
Active power control schemes at the turbine level have been incorporated by various WT manufacturers that help in participation of the WPP into frequency regulation and, hence, strengths the idea of ancillary services from WPP.
IC and PFC have been well adopted by researchers, and there is much scope for research on secondary frequency control. Hence, secondary frequency control by WPP can be explored further. Majority of developed techniques are based on DFIG-based WPP; however, frequency regulation by PMSG-based plant needs to be strengthened further.
It is expected that this review article will definitely be beneficial to all stakeholders working or exploring this area of wind power at all levels.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.