
Abstract
Wet pavement conditions, exacerbated by adverse weather, play a crucial role in roadway safety, contributing annually to numerous vehicle crashes. This study examines the dynamic aquaplaning phenomenon along 2-lane, 3-lane, and 4-lane urban motorways, aiming to assess key aquaplaning thresholds of water film thickness (WFT) above the pavement texture and aquaplaning speed (APS). In total, 225 alignments of various combinations of geometric parameters were examined. These were also related with a selected range of additional parameters, involving pavement surface characteristics, vehicle parameters, and rainfall intensity rates, resulting in 18,225 combinations in total. The aquaplaning assessment was performed by utilizing the method developed by Gallaway, where, in addition, the critical drainage paths were determined from the algebraic sum between the longitudinal grade and the superelevation rate in 3D roadway geometry. The applied multiple linear regression analysis revealed a high prediction precision for both WFT and APS models. In addition, the performed elasticity analysis revealed that critical parameters for WFT are rain intensity rates, followed by grade, where critical parameters for APS are tire pressure, followed by pavement texture. The present research aims to quantitatively define potential critical conditions related to key road and vehicle parameters and, ultimately, introduce evidence-based variable speed limits. Further work on the implementation of reliable variable speed limits should adopt a more integrated and holistic approach, taking into account additional conditions that further restrict vehicle speed (e.g., skidding, traffic conditions, visibility, detailed driver behavior assessment).
Adverse weather is proven to be a major determinative factor as far as roadway operation safety is concerned. In the U.S., based on 10-year-average data (2007–2016), rainy pavements contribute to about 10% of vehicle crashes, injuring over 210,000 people and killing over 2,400 people each year ( 1 ). Similar findings are obtained in the EU 10-year-average data (2013–2022) where, for wet pavements conditions, these figures are 19% of vehicle crashes, over 220,000 injuries, and over 4,600 people killed each year ( 2 ).
In particular, rainy weather combined with various intensity rates may lead to even more critical safety violations.
Speed distributions under such weather conditions are generally expressed by comparatively lower mean speeds and substantial speed variations, that is, volatility, compared with normal (wet) pavement conditions. Even under mild rainfall intensity (RI), the anticipated reduction in drivers’ visibility and pavement adhesion may potentially lead, under certain circumstances, to the appearance of the phenomenon of aquaplaning, also known as hydroplaning, and thus result in vehicle control instability and control loss.
Besides aquaplaning, a similar steering-failure hazard that drivers may experience during vehicle motion on pavement surfaces with reduced friction supply (not necessarily wet and/or rainy) is vehicle skidding.
Both skidding and aquaplaning are critical and undesirable conditions. The difference between the two phenomena is that skidding occurs while the tires are still in contact with the pavement, typically as a result of excessive vehicle braking or acceleration (friction demand exceeds friction supply), whereas aquaplaning initiates from a reduced or complete absence of contact between tire and pavement ( 3 ). This form of hydroplaning, known as dynamic hydroplaning, is the most frequent type and generally occurs for vehicle speeds typically over 70 km/h.
Aquaplaning phenomena may also occur at any speed on pavements with little or no micro-texture where even a very thin film of water may separate the moving tire from pavement; this type of aquaplaning is known as viscous aquaplaning. Additionally, on aircraft runways, reverted rubber aquaplaning makes its appearance, caused by the friction between the tires and the pavement, generating excessive heat ( 4 ). The simultaneous combination of aquaplaning and skidding is called partial aquaplaning.
Problem Statement
The present research addresses the dynamic aquaplaning phenomenon.
Although variable speed limit control has been increasingly applied as an active traffic management strategy to harmonize vehicle speed and improve safety at curved road sections under adverse weather conditions, its implementation has not been associated yet with the interaction between road, user, and vehicle parameters for various RI rates.
In light of the above, the objective of the present study is to assess key aquaplaning thresholds for various RI rates associated with the critical case of motorways (freeways) with extensive carriageway width, by examining various alignments in 3D (plan view, longitudinal profile, and superelevation design of divided freeways with variable carriageways), jointly with pavement surface characteristics (texture depth [TXD]), vehicle (tire tread depth [TTD] and pressure [TP]) and user parameters (reduction of vehicle’s rotational speed at the initiation of hydroplaning, or spindown [SD]).
Methodology
Aquaplaning is assessed through two basic parameters, which in turn depend on additional factors such as roadway geometry, environmental conditions, and driver-vehicle interactions. These parameters are:
1) Water film thickness (WFT) above the top of pavement texture
2) Aquaplaning speed (APS)
WFT is defined as the thickness of water measured from the top of the pavement texture asperities, subtracted by the mean texture depth (MTD) or mean profile depth (MPD) (Equation 1).

The way WFT is related to the total water flow (TWF) is visualized in Figure 1.
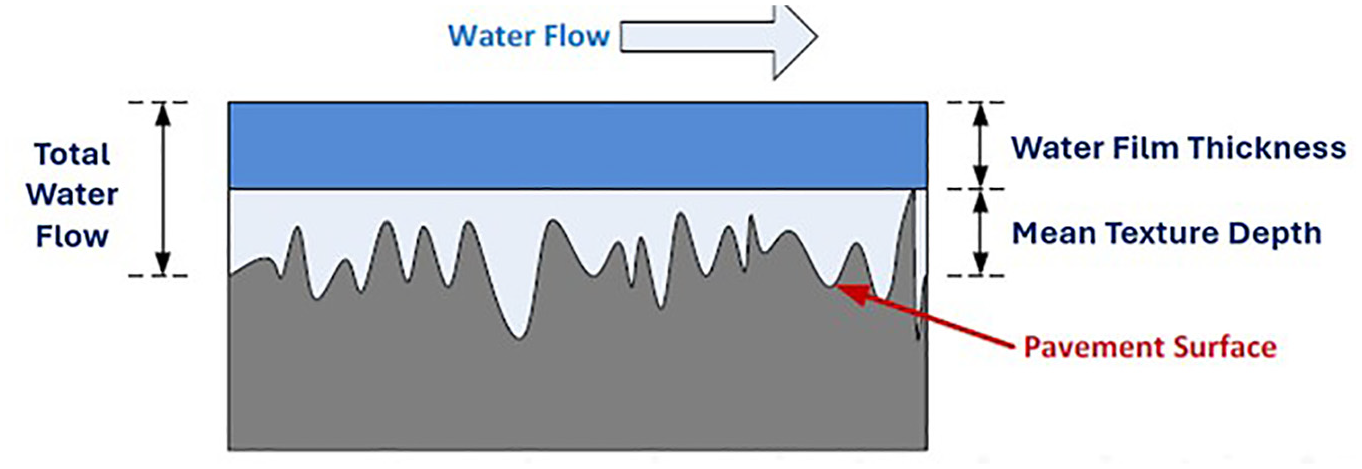
Relation between water film thickness, total water flow, and mean texture depth ( 4 ).
Two types of methods for addressing WFT and APS can be found in the literature; those based on empirical data and those developed via analytical aquaplaning modeling. The main advantage of analytical models over the respective empirical ones is the handling of compound geometric parameters (curved sections, grades, superelevation rates, etc.), as well as detailed tire - pavement interactions (e.g., rutting).
Concerning analytical models, numerical simulation and finite element assessments have been introduced to calculate WFT and APS ( 5 – 10 ). Nevertheless, as the analytical approach is complex, the above models focus mostly on the interactions between tire and pavement, and do not assess the potential impact of compound road geometry. In a study by Gunaratne et al., the relation between hydroplaning and safety was assessed, based on a crash analysis for wet pavement accidents that are related to hydroplaning ( 11 ). The research revealed that wider sections are most likely to produce hydroplaning. However, since vehicle speed was estimated based on the posted speed limit and tire parameters were not considered, the results should be interpreted with caution.
Certain empirical models, with respect to the range of the assessed parameters, have been proven to produce accurate results ( 12 , 13 ). These findings can be justified because these empirical models have undergone thorough extensive laboratory testing and certain improvements have been incorporated to assess a more precise grade calculation in areas of compound alignments.
Such a case is the Gallaway (1979) formula—one of the most widely accepted empirical models for determining WFT ( 3 , 4 , 14 – 16 ). The aquaplaning risk through the Gallaway method is assessed by determining the expected WFT for a given drainage path across the carriageway and comparing it against acceptable design limits, which, in general, fall between 3.3 mm and 4.0 mm, or even 5 mm for speeds below 80 km/h ( 3 , 14 , 16 ). It should also be noted that the Gallaway method is limited in assessing WFT along a single flow path (zero width) ( 14 ). Flow velocity and width or spread of the flow over the pavement surface are ignored ( 17 ).
The drainage path is the rainfall runoff trajectory that follows the steepest descent along the road pavement up to its edge line; in general, longer drainage paths require more time to accumulate rainfall water. To reduce the aquaplaning potential, the drainage paths should be limited to a length of approximately 60 m ( 3 , 16 ).
The APS outputs are compared against the roadway’s design speed and proposed speed limits based on other assessments that should be performed concurrently (vehicle skidding, stopping sight distance inadequacy, etc.).
In the present paper, the examined alignments are designed in accordance with the German freeway design guidelines (18), and more specifically those related to urban freeways (EKA 3 class).
Aquaplaning assessment is performed by utilizing the method developed by Gallaway et al., where, in addition, the algebraic sum between the longitudinal grade and the superelevation rate is assessed in the 3D roadway geometry ( 14 ).
More specifically, the drainage path is determined through a predefined calculation step along the axis of the assessed road section, and consists of segmented routes, where each segment extracts the algebraic sum (vector “pi”) between the longitudinal grade and the superelevation rate. Drainage paths may have constant direction vectors only at areas where the grade and superelevation vectors are fixed.
Figure 2 shows the right carriageway of a left-curved two-lane rural road section consisting of an entrance spiral curve followed by a circular arc. The road section initiates from point TS (tangent to spiral), following a tangent of a crowned superelevation (e1 = −2.5%, negative). Because of pavement rotation, around the centerline, the superelavation rate reverses to e2 = +2.5% (positive) at point TSa and reaches the constant value of e3 (let e3 = +ecirc_arc%, positive) at point SC (spiral to curve), where the curve radius is set to R. Assuming the pavement rotation axis located along an upgrade of s = +supgrade%, the algebraic sum “pi” of the right carriageway per design element at any lateral distance ai, measured from the pavement rotation axis (ai ≤ a [a: distance between carriageway edge line and pavement’s rotation axis – carriageway width without emergency lane]), is calculated as follows:
Tangent area



Spiral area






where
sai = longitudinal grade at a lateral distance of ai from the alignment’s rotation axis (%),
ex = superelevation rate at a distance x along the alignment’s rotation axis from point TS (%),
Δs = relative grade at spiral area between longitudinal gradient along the carriageway edge line and longitudinal gradient (s) along the alignment’s rotation axis (%),
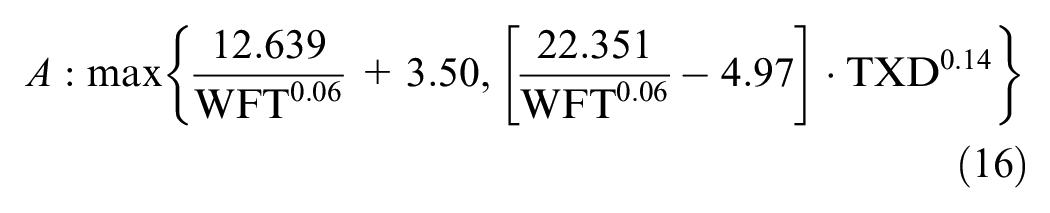
A = spiral parameter (m), and
L x = spiral length at distance x along the alignment’s rotation axis from point TS (m).
Circular arc area



At the roadway’s tangent area (before point TS), as described in Equations 2–4, the vector of the compound grade p, with respect to fixed grade and superelevation rates, has a constant direction.
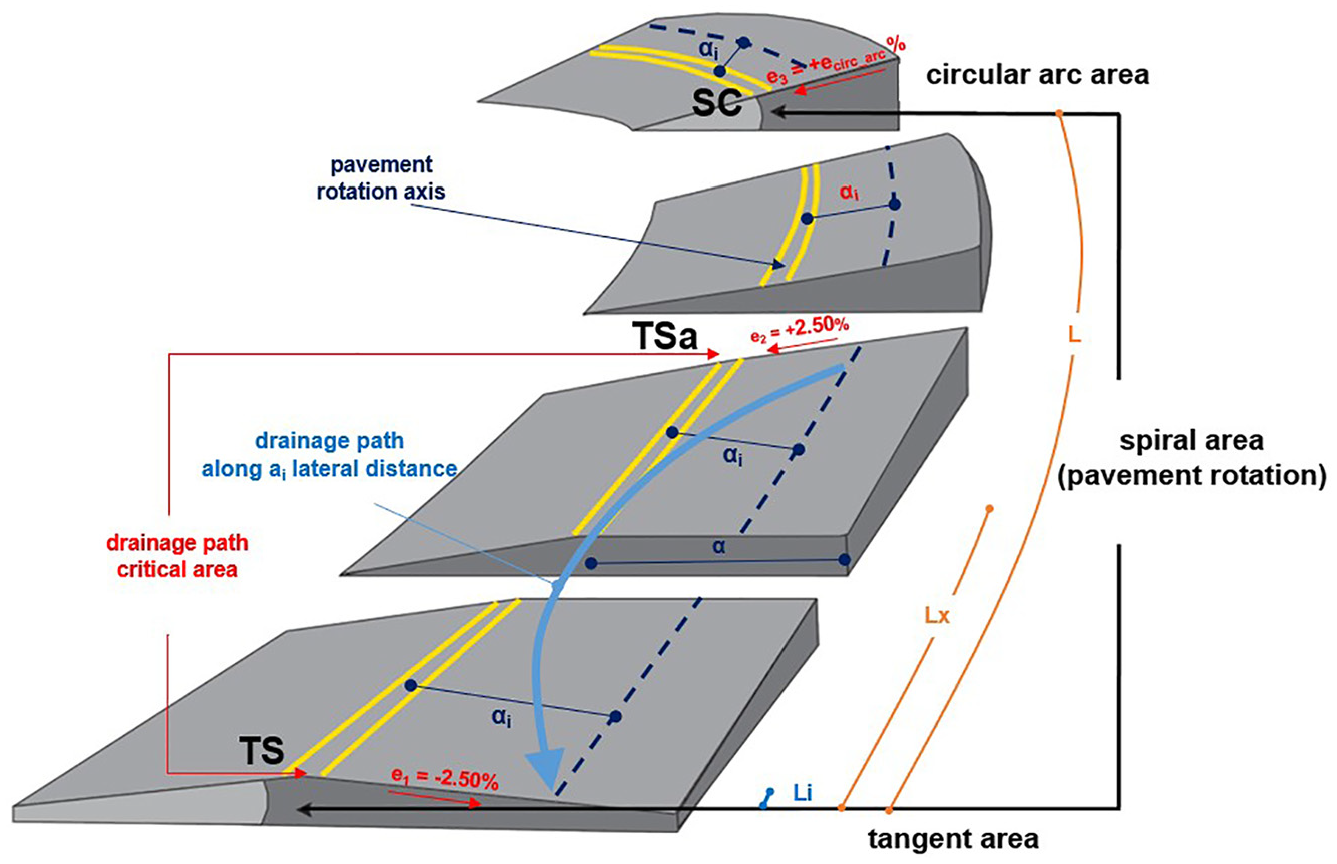
Pavement rotation along a left-curved, upgrade road section between tangent and curve.
Moreover, as seen in Figure 2, at the area between points TS and TSa, where the pavement rotation reverses the superelevation rate from negative (e1 = −2.5%) to positive (e2 = +2.5%), the critical drainage path corresponding to the lateral distance “ai” is formed. This is because the direction of the drainage path shifts from outward to inward and outward again, following a curved route, and thus increasing its length.
Since drainage path lengths are directly associated to the compound grade of the roadway, when mild roadway grades are utilized at the pavement rotation area from positive to negative superelevation rates (or vice versa), shorter drainage paths lengths are expected. On the other hand, when steeper grades are examined over the pavement rotation area from positive to negative superelevation rates (or vice versa), longer drainage paths result.
In the present analysis, the determination of the critical drainage paths, along the chainage of the alignment, consisted of a calculation step set to 0.05 m (Li = 0.05 m).
Based on the above equations, Figure 3 shows the calculated drainage paths along a 3 + 3-lanes left curved divided road section (2 x 11.00 m carriageway) consisting of an entry and exit spiral curve and a circular arc in between.
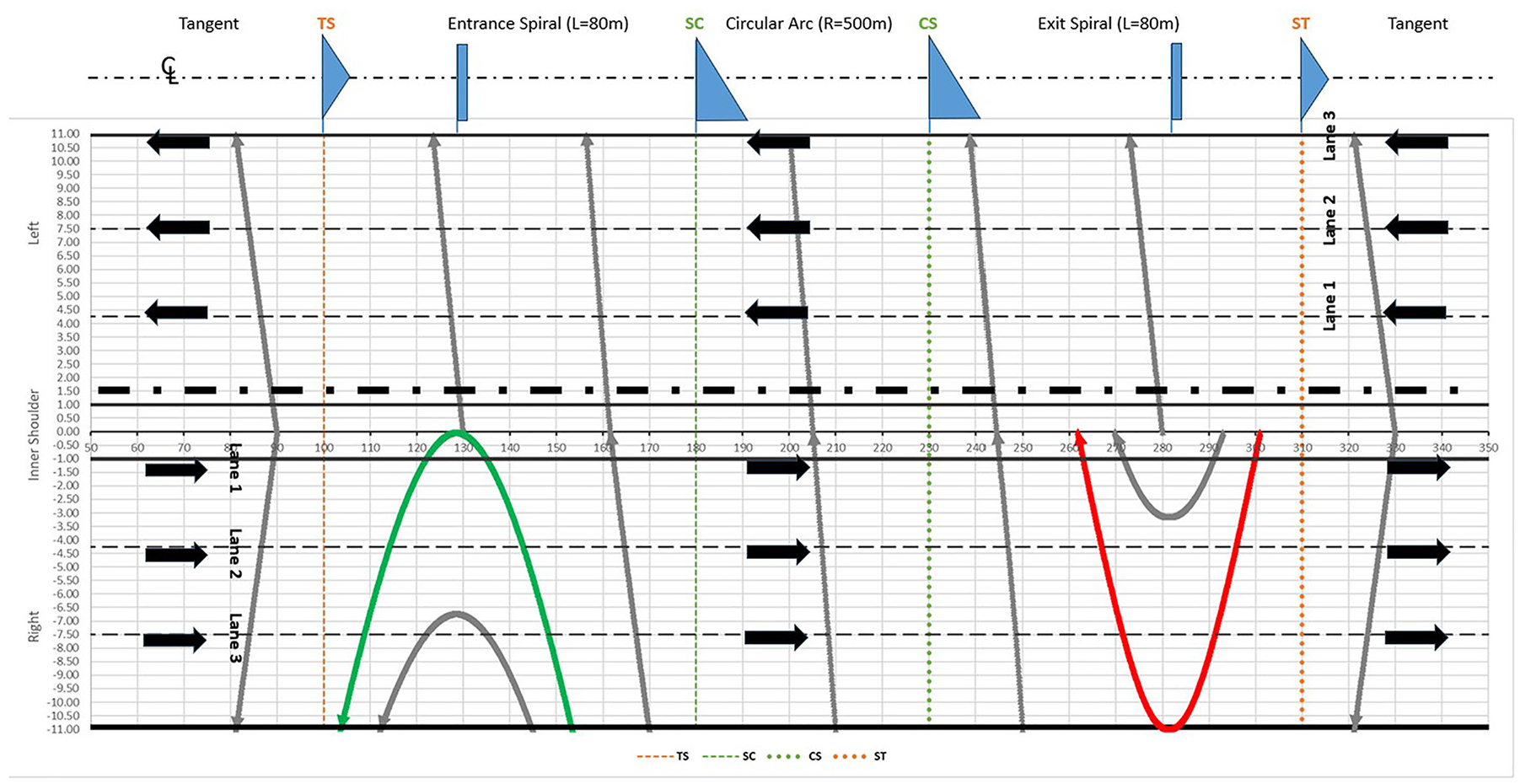
Drainage paths along a 3 + 3-lanes left-curved divided road section.
As seen in Figure 3, the drainage paths, in general, cross the pavement in the lateral direction (grey lines). However, at the areas where the superelevation rotates from outwards to inwards, and vice versa, the drainage paths form curved trails that are maximized within the green and red areas, respectively. These drainage paths (approximately 55 m), drastically increase the potential of aquaplaning hazards.
Nevertheless, as far as safety is concerned, it should be emphasized that the area with the red drainage path is more critical than the respective green one (Figure 3), because the water runoff starts and terminates at the inner shoulder area, adjacent to the roadway’s passing lane, where higher speeds are observed.
Based on the Gallaway method, the WFT and APS formulas are as follows ( 14 ):

where
TXD = average pavement texture depth (mm),
L = length of drainage path (m),
SG = best single grade representation of the drainage path (see below) (%), and
I = excess RI (actual RI minus the infiltration rate or permeability of the pavement surface) (mm/h).
As already mentioned, the grade of the drainage paths is constant only at the tangent area, where, along the curved sections, the so called “equal area grade” is applied, which is characterized as the “best single grade representation of the drainage path” and is calculated via the following steps ( 3 ):
Step 1: Plot the longitudinal profile of the drainage path.
Step 2: Calculate the total area under the profile.
Step 3: Calculate the vertical ordinate of the equal area triangle, by dividing the area above by the length of the profile, and then multiplying by 2.
Step 4: Plot the new ordinate (at highest point on drainage path) and join back to point of analysis.
Step 5: Calculate the slope of this line, expressed as a percentage (%).

where
SD = spindown of the tire rotational speed at the initiation of hydroplaning (%),
TP = tire pressure (pounds per square inch [psi]), and
TTD = tire tread depth (mm).
Analysis and Results
As stated in the above, the aquaplaning assessment was performed based on the German RAA 2008 urban motorway (freeway) design guidelines (EKA 3 Class) ( 18 ). As seen in Figure 4, three typical (divided) cross-sections: 2-lane (labelled RQ 25), 3-lane (RQ 31.5), and 4-lane (RQ 38.5) per direction of travel were examined, where the emergency lane of 2.00 m was also included.
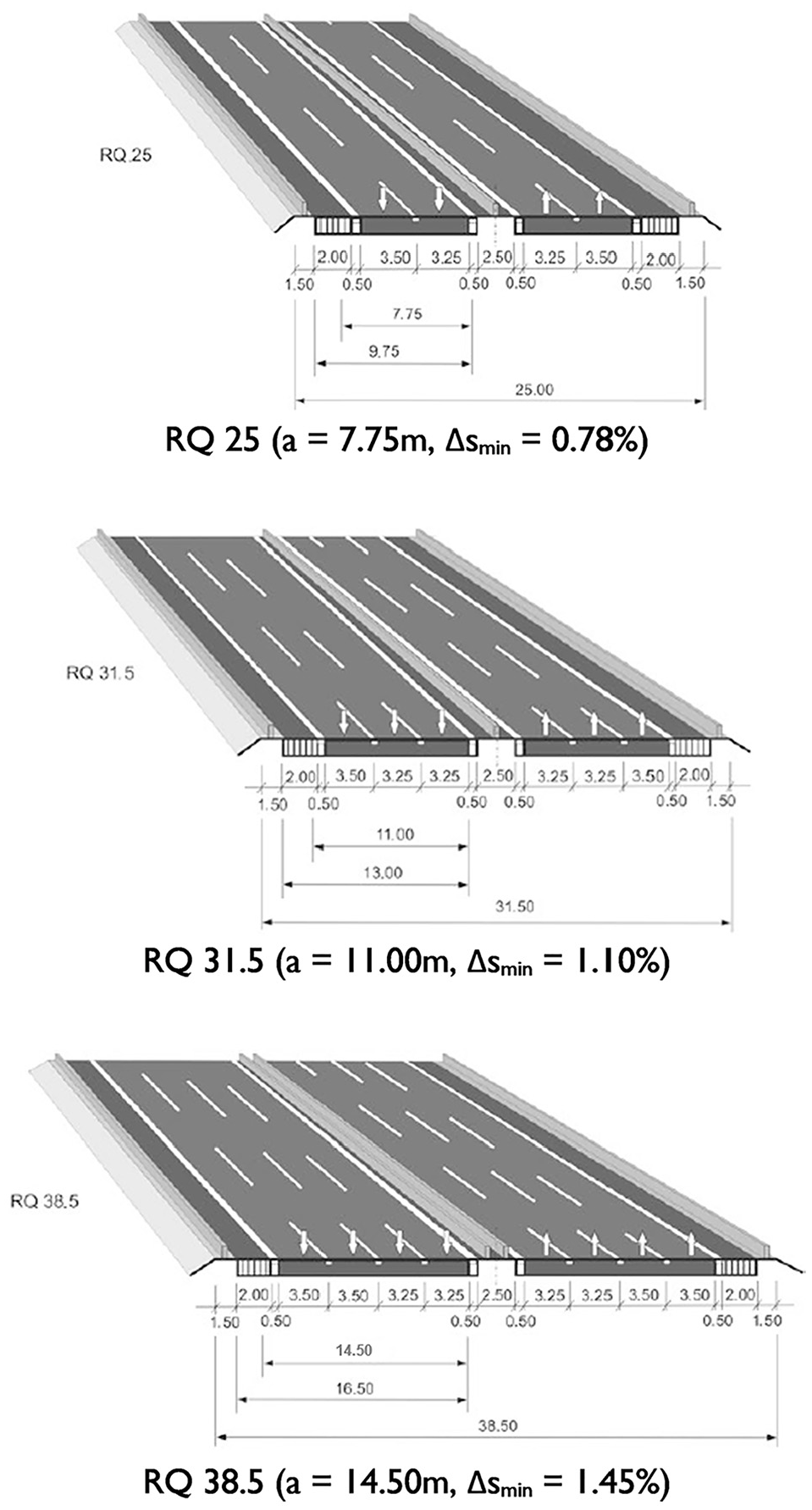
Typical cross-sections for EKA 3 motorways: 2-lane (labelled RQ 25) (top); 3-lane (labelled RQ 31.5) (middle), and 4-lane (labelled RQ 38.5) (bottom) per direction of travel.
The general design speed of EKA 3 motorways is 80 km/h, where the speed limit is set up to 100 km/h.
The RAA 2008 control values for critical geometric values are as follows ( 18 ):
Minimum curve radius: Rmin = 280 m
Minimum spiral parameter: Amin = 90 m
Minimum superelevation rate at tangents: emin = 2.5% (crown configuration)
Maximum superelevation rate along circular arcs: emax = 6.0%
Maximum longitudinal grade at the pavement rotation axis: saxis max = 6.0%
Minimum relative grade (Δsmin) between longitudinal gradient along the carriageway edge line and longitudinal gradient along the rotation axis at the areas between e1 = −2.5% and e2 = +2.5%
Δsmin = (0.1 a)% (a = distance between carriageway edge line and rotation axis)
Critical locations for hydroplaning are areas along the axis rotation between positive and negative superelevation rates. A wide range of geometric parameters were combined fulfilling the following constraints:
1) Utilization of three different radii (R1 = 280 m, R2 = 550 m, R3 = 1,000 m) paired with applicable superelevation rates (e1 = 6.0%, e2 = 4.0%, e3 = 2.5%), respectively, in line with RAA 2008 guidelines
2) R/3 ≤ A ≤ R
3) Utilization of increasing axis grade values from 0.0% up to the maximum value of 6.0%, reserving (for drainage adequacy) a minimum compound grade of 0.50% at the area of the carriageway edge line during pavement rotation between positive and negative superelevation rates
The following formula applies algebraically:

from which the minimum grade at the pavement rotation axis can be determined as follows:



With respect to the road geometry limitations mentioned above, and combining different design parameters as shown in Table 1, 75 alignments were developed per cross section type: (3 different radii values associated with respective superelevation rates) x (5 different lengths of spirals with respect to the R/3 ≤ A ≤ R rule) x (5 different grade values with respect to the minimum grade value of 1.6%). To examine all three typical cross-sections for EKA 3 motorways (RQ 25 [2 x 2-lane], RQ 31.5 [3 x 3-lane], and RQ 38.5 [4 x 4-lane]), in total 225 alignments were developed.
Utilized Geometric Parameters of the Examined Alignments
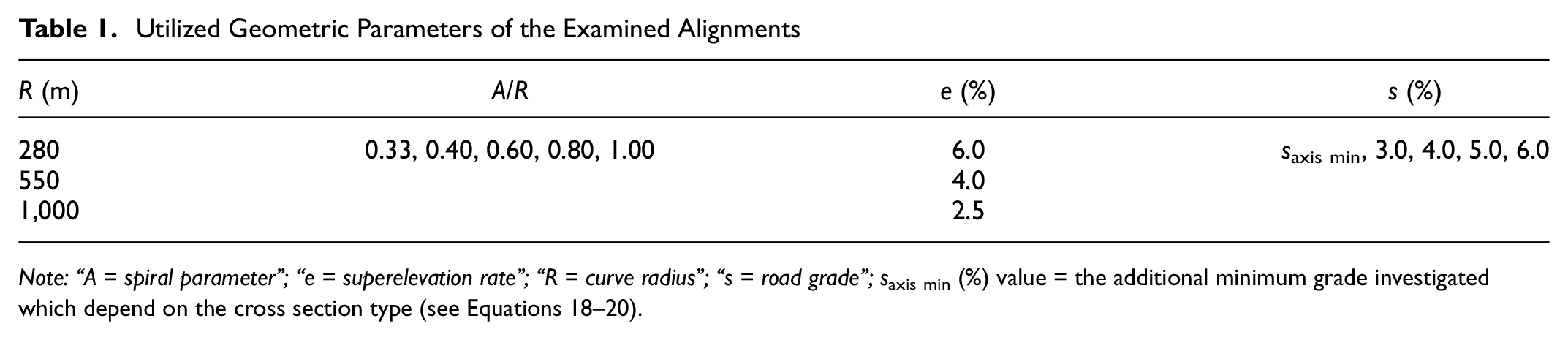
Note: “A = spiral parameter”; “e = superelevation rate”; “R = curve radius”; “s = road grade”; s axis min (%) value = the additional minimum grade investigated which depend on the cross section type (see Equations 18–20).
Additional parameters for the aquaplaning investigation involved TXD, TTD, SD, and TP, as well as RI levels. To investigate thoroughly their potential effect, a selected range based on literature findings was assessed as follows:
TXD (mm): 0.5, 1.0, 1.5 ( 4 )
Overall, 18,225 combinations were examined for the determination of WFT above the top of pavement texture and APS values. The process is based on defining the critical drainage path per case.
To assess the significance of involvement degree of the critical parameters stated above, it was decided to implement multiple linear regression for both WFT and APS outputs.
Linear regression is a widely known, simple technique used to model a linear relationship between a continuous dependent variable and one or more independent variables ( 21 ). As a result, regression models were developed to examine the correlation of WFT and APS against road geometry parameters.
To complement the developed models, elasticity analyses were also conducted. As defined in practice, elasticity analyses allow for the quantification of the response of the dependent variable for a 1% change of an independent continuous variable.
When dealing with independent categorical variables, it is meaningful to implement pseudoelasticities to obtain the incremental changes that are incurred as a result of category changes in the categorical variables ( 21 ).
By using elasticity (and pseudo-elasticity) analyses, the influence of each variable on WFT and APS was explicitly quantified. Following Washington et al., the elasticity (ei) of a dependent variable Y with respect to a continuous independent variable X, which has a regression coefficient β, can be defined as follows ( 21 ):

The absolute elasticities can be rescaled to fit the range of all independent continuous variables, by setting the lowest value to 1 and adjusting the rest of the variables in proportion with their absolute score. It was decided that it was not appropriate to adjust pseudoelasticities alongside elasticities because the increases in independent variables are not comparable.
The developed models’ descriptive statistics and coefficients for WFT and APS are shown in Tables 2 and 3, respectively.
Descriptive Statistics and Coefficients for Water Film Thickness (WFT)

Note: a = distance between carriageway edge line and rotation axis; RI = rain intensity; s = road grade; TXD = pavement texture depth; na = not applicable.
Descriptive Statistics and Coefficients for Aquaplaning Speed (APS)

Note: a = distance between carriageway edge line and rotation axis; RI = rain intensity; s = road grade; TP = tire pressure; TTD = tire tread depth; TXD = pavement texture depth; na = not applicable.
Discussion
As seen in Tables 2 and 3, the statistical analysis carried out for WFT and APS, utilizing linear regression, delivered high prediction precision (adjusted coefficient of determination values [R 2 > 96%]), although not all the independent variables examined were statistically significant.
The WFT analysis revealed that increasing grade and carriageway width causes drainage paths to flow more efficiently on one hand, but also expand their length on the other, thus resulting in a decrease and increase of WFT values, respectively. Concerning the effect of grade and carriageway width on APS, the opposite is experienced.
As far as WFT predictions are concerned, apart from the above independent variables (s and a), TXD and RI levels appear also significant. In addition, the contribution of TP and TTD is also required to improve the accuracy of APS.
For both models, besides the identification of the parameters involved, elasticity analysis was performed to quantify their effects.
More specifically, it can be seen in Table 2 that, with regard to WFT, the most critical parameter is RI, followed by grade. For example, by increasing by 1% the RI rate and grade value (s), the WFT value increases and decreases by 0.78% and 0.47%, respectively.
The respective critical factors that affect APS seem to be TP and TXD with corresponding elasticity values of 0.30 and 0.10. RI rates, although considerable, affect (reversely) APS, ranking third in significance (1% increase of RI results to 0.06% decrease in APS).
TXD seems to be a significant parameter for both WFT and APS. Based on the models shown in Tables 2 and 3, assuming TP and RI rates remain constant, an increase of the TXD by 0.5 mm results in a decrease of the WFT and an increase of the APS values by approximately 0.2 mm and 5 km/h, respectively.
From the road geometry parameters point of view, only grade (s) and carriageway width (a) values were found statistically significant. This means that the remaining utilized horizontal geometry parameters do not affect the results. However, since the critical drainage paths lengths are located at the area where the pavement rotation reverses the superelevation rate from negative (e1 = −2.5%) to positive (e2 = +2.5%), the location of the axis rotation crown (which coincides with the starting point of the pavement rotation) is important for determining the critical aquaplaning parameters.
Moreover, with the aim of reducing aquaplaning risk, both WFT and drainage paths lengths thresholds should be concurrently considered (≤ 4.0 mm and approximately ≤ 60 m, respectively). In the present analysis, certain cases were reported, especially on rather steep grades of the 4-lane cross-section (RQ 38.5, a = 14.50 m), where, and although WFT was determined below 4.0 mm, the respective critical drainage path length was calculated over 60 m.
Such cases should be treated by designing a crown between adjacent lanes, and it would be up to the road designer to determine the appropriate edge line lateral distance, where a good starting point is at the inner bound of the emergency lane. As far as this intermediate crown is concerned, based on the German guidelines, a superelevation difference of up to 5% between the selected adjacent lanes should be respected throughout the entire process.
It is evident that, by designing a crown between adjacent lanes, the reduction of the critical drainage path length will result in a reduction of the respective WFT. This process can be also implemented for cases where the WFT values are calculated over the critical threshold of 4.0 mm.
Besides setting evidence-based superelevation crown lines between adjacent lanes, another measure to reduce WFT, and thus increase APS, is to set minimum thresholds for TXD.
Figure 5 shows the values of WFT resulting from the model shown in Table 2, as a function of grade, assuming TXD parameters are set to their average value of 1.0 mm. A general conclusion is that, as grade becomes steeper, the aquaplaning potential seems to decrease. However, this finding needs to be also cross-examined with the respective drainage path length.
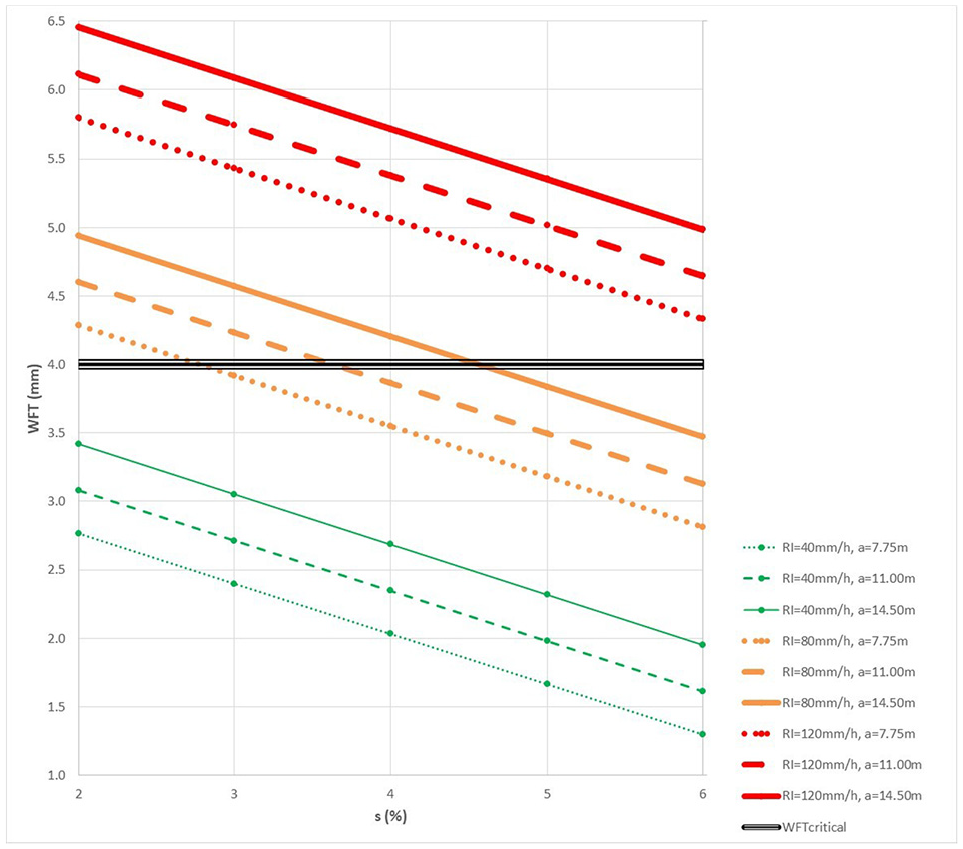
Water film thickness (WFT) outputs.
By examining Figure 5 more closely, it can be seen that WFT values above the critical value of 4 mm are experienced for RI rates approximately over 80 mm/h, even for freeways with 2 x 2 lanes. More specifically, for RI = 80 mm/h, WFT > 4 mm result for grade values below approximately 2.8%, 3.7%, and 4.5%, correspond to freeways with 2 x 2 lanes (carriage width 7.75 m), 3 x 3 lanes (carriage width 11.00 m), and 4 x 4 lanes (carriage width 14.50 m), respectively. Therefore, for combinations of freeway cross sections, grade parameters, and RI rates that result in WFT values above 4.0 mm, the modeled APS values are not valid.
Such cases should be treated with caution, since lower speed values should be recommended as APS (e.g., the absolute minimum values of 60 km/h or 70 km/h). Alternatively, certain other options to reduce WFT are also available, such as introducing (longitudinal) crown lines among the lanes (preferably at the breakpoint of the emergency lane) or setting minimum thresholds for TXD.
Conclusions
The present research aimed to investigate critical aquaplaning thresholds utilizing three typical (divided) cross sections with 2-lanes (RQ 25), 3-lanes (RQ 31.5), and 4-lanes (RQ 38.5) per direction of travel.
The assessment was performed by making use of the well-known Gallaway formula, enriched by analyzing the involved road geometry parameters in 3D, jointly with various RI rates, pavement surface characteristics (TXD), and vehicle parameters (TTD and TP), and assuming a typical value of user parameter (SD of the rotational speed at the initiation of hydroplaning set to 10%) ( 14 ).
The proposed methodology, based on the determination of the critical drainage path, revealed areas where aquaplaning potential is critical and must not be ignored. In total, 18,225 combinations were examined for the determination of WFT above the top of pavement texture and APS values.
The implementation of multiple linear regression revealed the significance of the involved parameters, where from the road geometry point of view, only grade (s) and carriageway width (a) values were found statistically significant.
The performed statistical analysis was complemented by respective elasticity analyses, to quantify the effects of the independent variables. The assessment revealed that critical parameters for WFT are RI rates, followed by grade, where critical parameters for APS are TP, followed by TXD.
Although the aquaplaning investigation was based on the German RAA 2008 urban motorway design guidelines (EKA 3 Class), significant differences with respect to the permissible combinations of the utilized geometric parameters (cross-section types, curve radii, grade, and superelevation rates) are not expected to be reported when other design guidelines are utilized. Moreover, the length of the critical drainage path, located approximately at the superelevation rotation area from the positive normal value of e1 = +2.5% to the respective negative of e2 = −2.5%, and vice versa, depends partly on the corresponding length along the alignment (e.g., for American Association of State Highway and Transportation Officials, tangent runout plus part of runoff length, where normal superelevation rate is set to e = 2.0%), and mostly on the grade value and utilized carriageway width.
The authors based their research on Gallaway’s empirical assessment, which has gone through extensive laboratory testing. However, the further enrichment of the model is subject to additional research, to assess potential impact on aquaplaning for various pavement-vehicle interactions (cornering, various braking maneuvers, etc.), contemporary vehicle types (e.g., sport utility vehicles), as well more detailed vehicle parameters (e.g., vehicle weight, tire dimensions). From the geometric point of view, the assessment of areas with variable grades seems also an interesting area to examine further.
The present research aimed to quantitatively define potential critical conditions related to key road and vehicle parameters and, ultimately, to introduce evidence-based variable speed limits.
Variable speed limits act as an adaptive measure to combat hydroplaning risks, by encouraging safe speeds in adverse weather and reducing accidents. However, aquaplaning potential is a dynamic phenomenon, where the determination of the respective critical parameters, such as WFT, drainage path lengths, and APS, require the contribution of real-time road conditions (road geometry and pavement texture), vehicle characteristics, and RI rates.
While most of the above data collection follows standard procedures, RI data can be gathered by statistically analyzing real-time records from nearby meteorological stations, accounting for their proximity and spatial relevance. This approach ensures that RI measurements are accurately tailored to the specific area under study.
In light of growing environmental concerns, the implementation of reliable variable speed limits should extend beyond aquaplaning assessments, adopting a more integrated and comprehensive approach that incorporates additional conditions which restrict vehicle speed ( 22 ).
Key parameters, such as roadway design speed, skidding risk, operational restrictions, and stopping sight distance limitations, along with a more detailed analysis of driver behavior, should be systematically evaluated in tandem. This holistic approach can create a safer, more adaptive speed control system that responds dynamically to varying road and environmental conditions.
In conclusion, it must be highlighted that TP is mostly critical for the determination of APS. Modern automated vehicles are equipped with advanced sensors that continuously monitor tire characteristics and are also capable of processing road and RI data received from external sources. Therefore, the proposed methodology, with regard to outputs precision, is primarily applicable to connected and autonomous vehicles (CAVs), whose adoption can significantly enhance roadway safety by using real-time data to dynamically adjust speeds and navigate challenging conditions more effectively. CAVs can respond promptly to changing road conditions, reducing the risks associated with aquaplaning and skidding, whereas their ability to implement and adhere to variable speed limits based on real-time information ensures a safer driving environment under adverse weather conditions.
Given also the current high proportion of conventional vehicles on the road, APS should be configured based on a statistical analysis of average values of the tire parameters involved. Finally, with the aim of improving road safety, public awareness campaigns should be actively promoted, emphasizing the dangers of driving on worn, under-inflated tires, or both, especially in adverse weather conditions. These campaigns should educate drivers on the increased risk of hydroplaning and loss of control associated with poor tire maintenance, urging regular checks on tread depth and mostly on TP, to enhance vehicle stability and safety on rainy pavements.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: S. Mavromatis, A. Kontizas, V. Matragos, K. Amiridis, A. Trakakis; data collection: S. Mavromatis, A. Kontizas, V. Matragos, K. Amiridis, A. Trakakis; analysis and interpretation of results: S. Mavromatis, A. Kontizas, V. Matragos, K. Amiridis, A. Trakakis; draft manuscript preparation: S. Mavromatis, A. Kontizas, V. Matragos, K. Amiridis, A. Trakakis. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data Accessibility Statement
The datasets used and analyzed during the current study are available from the corresponding author on reasonable request.