
Abstract
As autonomous driving technologies continue to advance, autonomous buses (ABs) have moved beyond laboratory testing into real-world operation, and many passengers have already gained riding experience. Existing studies have examined the acceptance of autonomous vehicles or ABs, but they have not analyzed acceptance behavior from the perspective of whether individuals have prior experience. Building on the theory of planned behavior (TPB), this study incorporates three dimensions of perceived risk and proposes an extended TPB model to examine acceptance differences between individuals who have taken an autonomous bus and those who have not. The findings indicate that, compared with individuals who have taken an autonomous bus, those without riding experience exhibit a stronger positive effect of subjective norms on behavioral intention, as well as stronger negative effects of operational and environmental risks on attitude, subjective norms, and perceived behavioral control. For individuals with riding experience, attitude and perceived behavioral control exert stronger positive effects on behavioral intention. Furthermore, this study analyzes acceptance differences between individuals with and without riding experience across various sociodemographic groups. The results show that among middle- and low-income respondents who have not taken an autonomous bus, general risk of behavior beliefs demonstrate a significant positive effect on perceived behavioral control. Younger individuals show substantially lower safety concerns and higher acceptance, while individuals with partners exhibit stronger attitude-driven behavioral intentions. Overall, the findings provide empirical insights to support governments and industry stakeholders in developing policies relevant to the operation and promotion of autonomous bus services.
Keywords
Introduction
Although autonomous vehicles (AVs) still face numerous challenges in relation to technological maturity and regulatory supervision, autonomous buses (ABs) have emerged as a prioritized application scenario within the public transportation system. Because of their characteristics such as fixed routes, controlled operating environments, and lower costs for large-scale management, ABs offer a practical pathway for advancing the real-world implementation of autonomous driving technologies. In both developed and developing countries, they provide an effective means to explore the feasibility of autonomous driving, accumulate operational experience, and refine policy frameworks.
Currently, many cities have launched pilot projects for ABs ( 1 ). For example, since 2019, Beijing, China has deployed small ABs equipped with L4 automated driving technology on designated routes in the Yizhuang Economic Development Zone, with a cumulative mileage exceeding 5,000 km as of 2025. In 2023, an AB service was introduced for testing on open roads in Jiangxinzhou, Nanjing, providing more realistic operational data and passenger experience. Although ABs have not yet been widely deployed and currently operate mainly on predetermined routes in environments with relatively low traffic complexity, technological progress has enabled an increasing number of ordinary citizens to freely access ABs services. The transition from limited pilot operations to large-scale public deployment depends not only on technological advancement and policy support but also, and more importantly, on securing broad public acceptance to ensure successful market adoption and effective integration with existing transportation systems ( 2 ). Therefore, examining the acceptance of ABs among individuals who have already experienced taking them, and comparing their attitudes with those who have no such experience, holds significant value for promoting the application of ABs in more complex real-world traffic environments in the future.
ABs are fundamentally driven by autonomous driving technology, and the rapid advancement of this technology in recent years has attracted significant academic attention. Among related research topics, public acceptance has emerged as one of the most extensively examined areas ( 3 ). Hegner et al. ( 4 ) and Zhang et al. ( 5 ) employed the technology acceptance model (TAM) to investigate public acceptance of AVs and found that trust in autonomous driving technology plays a crucial role. Rahman et al. ( 6 ) and Jing et al. ( 7 ) conducted systematic reviews of existing literature and summarized key factors influencing the public’s acceptance of AVs, including perceived usefulness, perceived ease of use, attitude, and perceived risk. Further studies by Jing et al. ( 8 ) and König et al. ( 9 ) revealed that the level of knowledge about AVs and concerns about safety are significant determinants of usage intention. In addition, some scholars have also examined how socioeconomic characteristics, personality traits, and social influence contribute to public acceptance of AVs ( 10 , 11 ).
Compared with the growing body of research on the acceptance of AVs, studies focusing specifically on ABs remain relatively limited. However, despite sharing the same underlying autonomous driving technology, AVs and ABs differ substantially in relation to operational characteristics, passenger experience, and risk perception, differences that may directly influence public acceptance and perceived risks ( 12 ). ABs, as a form of public transportation, are designed to address the “first-mile/last-mile” challenge in urban mobility. They operate on fixed routes and schedules, in contrast to AVs that allow flexible route choices and primarily serve individual or private transportation needs, resulting in distinctly different passenger profiles ( 13 ). In addition, the in-vehicle environment differs considerably between the two modes: AVs typically accommodate only a few passengers, whereas ABs carry larger passenger volumes, creating shared spaces and potential interactions among passengers. Moreover, their risk perception also varies. The larger size and capacity of ABs may lead to different safety concerns compared with AVs ( 14 ). Therefore, although substantial research has examined public acceptance of AVs, there remains a clear need to extend acceptance studies specifically to ABs, building on the existing foundation ( 3 , 7 ).
In addition to the differences between ABs and AVs, distinctions also exist between AVs and conventional buses (CBs). A study conducted in Finland reported that more passengers felt that the in-vehicle personal security of ABs was worse or significantly worse compared with CBs ( 15 ). Furthermore, unlike CBs where human drivers can make intuitive decisions and communicate with passengers, ABs rely entirely on automated systems for navigation and passenger interaction. This technological dependence results in different patterns of risk perception and trust requirements compared with traditional public transportation ( 16 ). At the same time, noticeable differences between AB and CB services exist in relation to speed, convenience, and operational efficiency, factors that play a crucial role in shaping public acceptance ( 17 ). Therefore, as autonomous driving technology continues to mature, studying public acceptance of AVs can also help identify how autonomous bus services may more effectively replace conventional public transportation in future mobility scenarios.
Based on the preceding analysis, AVs, ABs, and CBs differ significantly in relation to vehicle performance, operational mode, passenger trust, and perceived risks, all of which might directly influence passenger acceptance. Therefore, conducting dedicated acceptance studies on ABs holds substantial practical significance. In existing research on ABs acceptance, scholars have generally adopted research frameworks developed for AVs. For example, Cai et al. ( 18 ) and Yuen et al. ( 19 ) utilized the unified theory of acceptance and use of technology (UTAUT) model to investigate how trust and perceived value affect public acceptance of ABs. Madigan et al. ( 17 ) found that performance characteristics, whether ABs could operate faster, more conveniently, and more efficiently than CBs, constitute a key determinant of adoption intention. Herrenkind et al. ( 16 ) applied TAM to survey individuals who had experience taking ABs and identified trust in autonomous bus technology as a critical predictor of acceptance. In addition, Dong et al. ( 20 ) found that most respondents preferred ABs with a safety operator onboard, and that males and younger groups were more willing to adopt autonomous bus services. These previous studies have primarily relied on data collected during the early experimental or operational stages of autonomous bus services. Public understanding of AVs has therefore remained largely at the level of conceptual introduction, with limited empirical evidence capturing passengers’ actual experiences and perceptions after a sustained period of real-world operation.
The theoretical foundation for studying acceptance of ABs lies in TAMs. A variety of approaches have been used to investigate technology acceptance, principally including the theory of planned behavior (TPB) and its extensions, TAM and its extensions, and UTAUT and its extensions. TAM, proposed by Davis ( 21 ), centers on two primary determinants: perceived usefulness and perceived ease of use. UTAUT integrates key factors from multiple theoretical models and typically comprises performance expectancy, effort expectancy, social influence, facilitating conditions, age, gender, experience, and voluntariness ( 22 ). TPB, introduced by Ajzen ( 23 ), is used to explain and predict human behavior and includes three core components: attitude, subjective norm, and perceived behavioral control. Taken together, TAM places greater emphasis on internal psychological determinants of individual behavior while giving less consideration to external contextual influences. As an emerging technology, acceptance of ABs is likely to be substantially shaped by external factors such as peers, media, and policy; therefore, TAM alone may be insufficient to fully account for the complex decision process of choosing to take ABs. Moreover, UTAUT contains numerous variables and complex relationships with limited extensibility, which in some cases does not substantially improve explanatory power ( 24 ). In addition, the traditional models discussed earlier generally do not incorporate perceived risk. Given that autonomous driving is an emerging technology, public acceptance of ABs is often strongly affected by perceived risk. Accordingly, extending the TPB framework to include perceived risk variables can better facilitate a comprehensive and in-depth understanding of the primary determinants influencing public acceptance of ABs.
Based on the preceding analysis, existing studies on the acceptance of autonomous transportation technologies have primarily focused on AVs. Although these studies have generated substantial theoretical and empirical insights, research on the acceptance mechanisms of ABs within public transportation contexts remains limited. In particular, whether differences exist in acceptance between individuals who have experience taking ABs and those who have not remains an unresolved research gap. First, ABs possess public service attributes and collective travel characteristics. Thus, passengers’ trust foundations, perceived risks, and behavioral intentions differ fundamentally from those of private car users. Simply applying the research framework of AVs may not adequately capture the social acceptance logic of ABs. Second, prior studies have tended to emphasize technology perception and attitude-behavior pathways, while paying insufficient attention to the role of risk perception in group travel decision-making. In addition, existing work has also not systematically examined how riding experience influences acceptance. To address these gaps, this study adopts actual autonomous bus riding experience as a comparative perspective. Within the TPB framework, perceived risk is incorporated to develop a behavioral intention model more suitable for public transportation scenarios. In addition, this study investigates heterogeneity across different socioeconomic groups. The findings will provide practical implications for deployment strategies and passenger experience optimization of autonomous bus services.
The remainder of this paper is structured as follows. The next section presents the methodology, introducing TPB and the rationale for incorporating perceived risk, as well as describing the structural equation modeling approach and research hypotheses. The following section details the data sources, including the data collection procedures and quality assessment. The penultimate section reports and analyzes the empirical results, focusing on the differences in path coefficients across distinct respondent groups to examine heterogeneity in acceptance mechanisms. The final section concludes with a summary of key findings and provides policy recommendations for governments and industry stakeholders to support the deployment of autonomous bus services. This section also discusses the study’s limitations and suggests directions for future research.
Methodology
This study is based on TPB and extends the TPB framework by incorporating three dimensions of perceived risk, thereby constructing an extended TPB-based structural equation model. The core variables of the model include attitude, subjective norm, and perceived behavioral control. To more comprehensively analyze public behavioral intentions and actual behavior concerning the acceptance of ABs, the perceived risk variable is also introduced.
Cunningham ( 25 ) conceptualized perceived risk through two key components: uncertainty and the severity of consequences. This concept has since been widely applied in studies of consumer behavior and the acceptance of emerging technologies ( 26 – 28 ). Similar to the acceptance of other new technologies, perceived risk can also be applied to the study of behavioral intention toward autonomous bus services in the context of autonomous driving technology ( 29 ). In this study, to facilitate the measurement of users’ subjective perceptions concerning the uncertainty and potential negative consequences associated with using ABs, perceived risk is specifically divided into three dimensions: operational and environmental risk, severity of accident consequences, and general risk of behavior. Adopting a multidimensional approach to perceived risk makes it easier to design questionnaire items and enables the differentiated influence mechanisms of various risk types on user acceptance to be examined from multiple perspectives.
Operational and environmental risk. This dimension concerns the adaptability of ABs to specific environments and unexpected situations, such as the likelihood of collisions with other vehicles and the ability to respond to suddenly appearing vehicles, pedestrians, or road obstacles. It primarily focuses on the technical reliability of ABs and their interaction with complex road environments.
Severity of accident consequences. This dimension refers to the potential severity of outcomes from accidents involving ABs compared with CBs, including casualties, public opinion impacts, economic losses, and psychological harm. It emphasizes the possible consequences of autonomous bus accidents and their effects on society and individuals, reflecting public concern over the potential outcomes of such incidents.
General risk of behavior. This dimension encompasses the public’s overall perception of risks associated with taking ABs. It focuses on passengers’ perceptions and attitudes toward safety measures and behavioral norms during autonomous bus travel, including the presence of a safety operator, use of seat belts, and interactions with pedestrians and other vehicles. This dimension reflects public expectations concerning safety measures and the intention to reduce perceived risk through such measures.
Original TPB Constructs
In this study, attitude is measured across four dimensions: comfort, convenience, fare, and overall evaluation. The more positively individuals perceive these aspects of ABs, that is, the more comfortable, convenient, and affordable they consider them, the more favorable their acceptance of ABs. Accordingly, we propose the following hypothesis concerning attitude:
H1: Attitude has a positive effect on behavior intention.
Subjective norm is also measured across four dimensions: influence from family and friends, media coverage, policy support, and the behavior of other road users. Individuals are more likely to hold a positive attitude toward ABs when their family and friends view them favorably, media coverage is positive, supportive policies and incentives are abundant, and there are fewer conflicts with other road users. We thus propose the following hypothesis:
H2: Subjective norm has a positive effect on behavior intention.
Perceived behavioral control is measured across three dimensions: the level of understanding of autonomous driving technology, trust in ABs, and perceived control over the decision to use the service. Higher levels of understanding and trust naturally increase willingness to adopt ABs. In addition, prior research indicates that individuals are more likely to accept new technologies when they perceive that the decision to use them lies with themselves ( 30 ). Therefore, we propose the following hypothesis:
H3: Perceived behavioral control has a positive effect on behavior intention.
Added Constructs
Based on previous research, higher perceived risk is associated with lower attitude and, consequently, lower acceptance ( 7 , 8 ). This study posits that when individuals perceive higher operational and environmental risks and believe that the consequences of AB accidents are more severe, they are likely to develop doubts about ABs, leading to more negative attitudes. Similarly, if individuals perceive that ABs require general safety measures such as a safety operator or seat belts, this indicates a lack of trust in the system, which is also expected to result in negative attitudes. To test the effect of perceived risk on attitude, the following hypotheses are proposed:
H4: Operational and environmental risk has a negative effect on attitude.
H5: Severity of accident consequences has a negative effect on attitude.
H6: General risk of behavior has a negative effect on attitude.
Even when family, friends, media, and policy show positive attitudes, individuals may still exhibit negative subjective norms if they perceive high operational and environmental risks, severe accident consequences, or the need for safety measures. To examine the impact of perceived risk on subjective norm, the following hypotheses are proposed:
H7: Operational and environmental risk has a negative effect on subjective norm.
H8: Severity of accident consequences has a negative effect on subjective norm.
H9: General risk of behavior has a negative effect on subjective norm.
High perceived risk may also reduce individuals’ confidence in mastering new technologies and their perception of safety, thereby negatively affecting perceived behavioral control. Accordingly, the following hypotheses are proposed:
H10: Operational and environmental risk has a negative effect on perceived behavioral control.
H11: Severity of accident consequences has a negative effect on perceived behavioral control.
H12: General risk of behavior has a negative effect on perceived behavioral control.
The extended TPB-based model proposed in this study is illustrated in Figure 1.
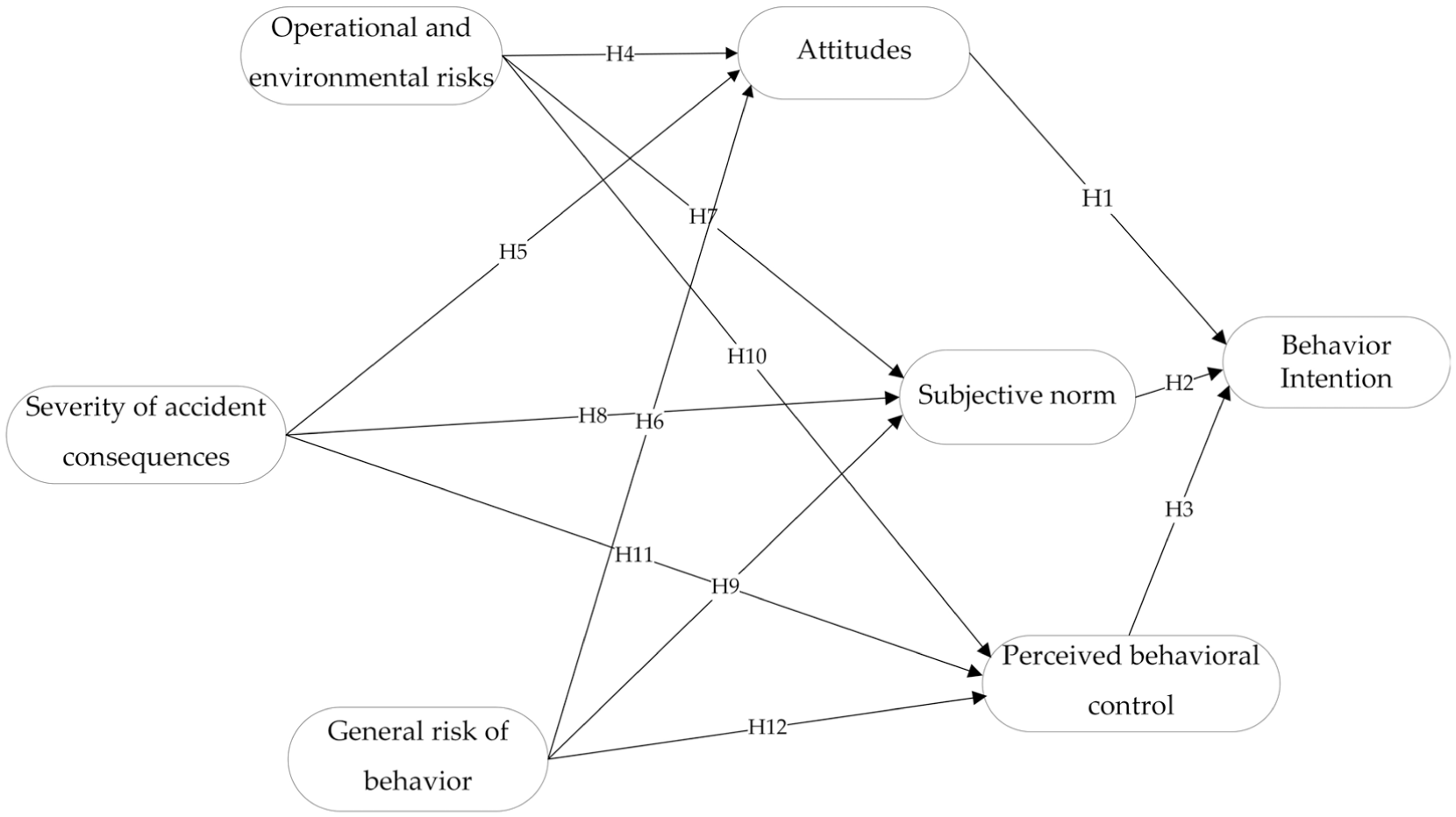
Proposed extended theory of planned behavior model.
Structural Equation Modeling
This study tests the proposed hypotheses by employing a structural equation modeling (SEM) approach. SEM is a statistical technique that enables researchers to examine and estimate causal relationships among variables, including observed variables, latent constructs, mediating variables, error terms, and measurement errors. It allows for the simultaneous testing and estimation of multiple interrelated dependency relationships ( 31 ). By combining the strengths of factor analysis and path analysis, SEM enables researchers to handle complex theoretical models within a single statistical framework ( 32 ).
In this study, the latent variables include operational and environmental risk, severity of accident consequences, general risk of behavior, and the classical TPB constructs: attitude, subjective norm, perceived behavioral control, and behavior intention. These variables cannot be directly measured and must instead be assessed indirectly through observed indicators. Therefore, using SEM allows for a clear representation of the paths among latent variables and the extent of their interrelationships ( 33 ).
Data
Questionnaire Design
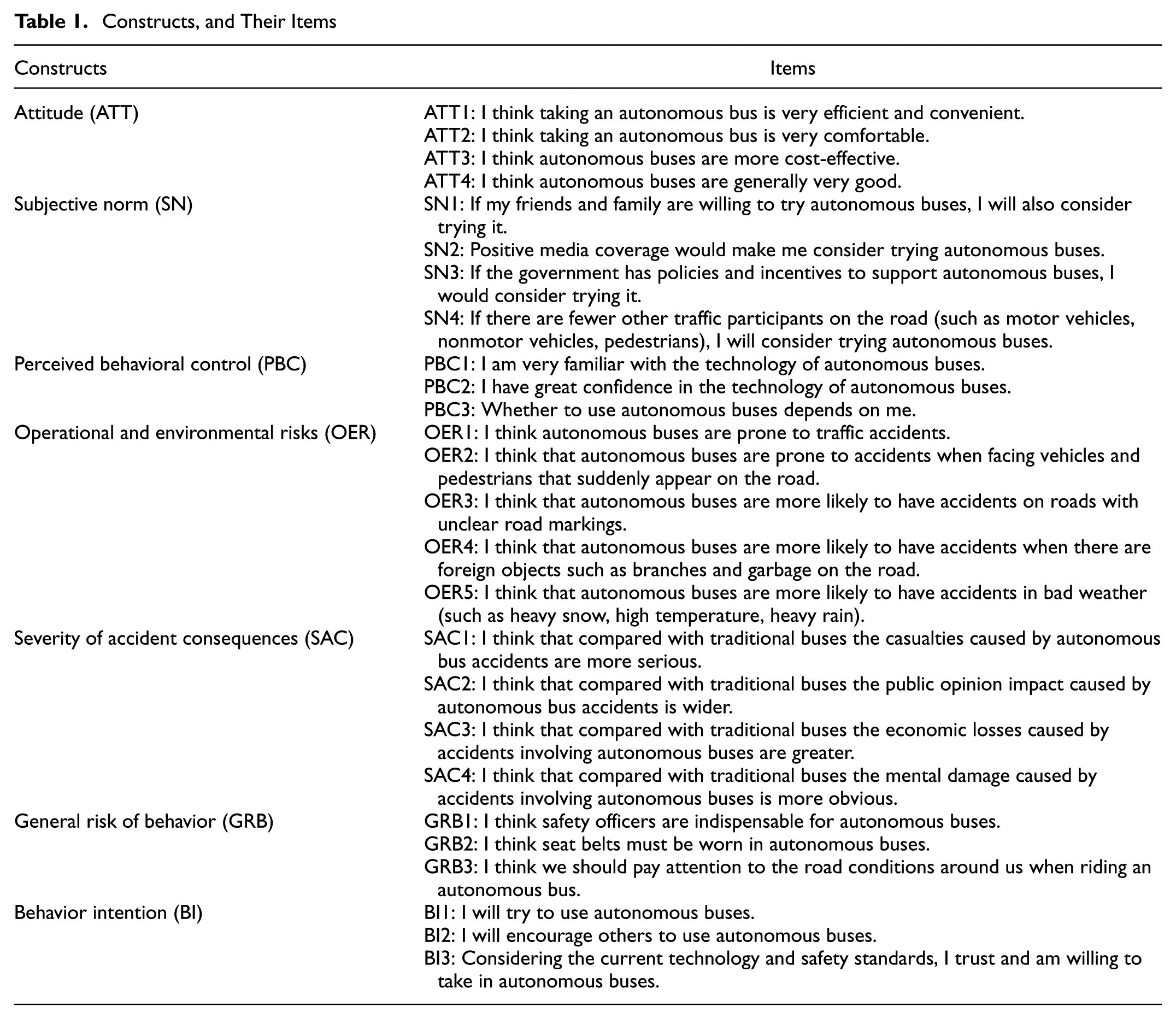
The survey questionnaire used in this study consisted of two main sections. The first section collected information on participants’ sociodemographic characteristics, including age, gender, occupation, marital status, and educational level. The second section measured the TPB constructs and the extended variables, including attitude, subjective norm, perceived behavioral control, and the three dimensions of perceived risk. A 5-point Likert scale was employed, ranging from 1 (strongly disagree) to 5 (strongly agree). Based on existing research ( 29 , 33 , 34 – 38 ), the specific measurement indicators are presented in Table 1. To ensure that respondents had a clear understanding of the study context, the beginning of the questionnaire provided an introduction to the definition of ABs and highlighted their differences from conventional bus services.
Constructs, and Their Items
Data Collection
The survey data were collected using both online and offline methods. Offline questionnaires were administered through onsite visits to the autonomous bus route in Jiangxinzhou, Nanjing. Online questionnaires were created and distributed using the professional survey platform Wenjuanxing. To distinguish respondents with experience of taking ABs, the online survey included a screening question: “Have you ever taken an autonomous bus?” Since the number of passengers with autonomous bus experience is currently limited, data from respondents who had taken an autonomous bus were collected from both online and offline sources to avoid sample imbalance, whereas data from respondents without such experience were collected exclusively online. To ensure comparability between online and offline responses and to minimize regional differences in perceptions and experiences, the online survey was restricted by IP address so that only users located in Nanjing could participate. During the offline survey process, trained investigators conducted onsite data collection along the pilot operation route of AB services in Jiangxinzhou, Nanjing. The questionnaires were printed in advance, and during the bus operation period, passengers were either interviewed directly by the investigators or invited to complete the questionnaire independently. In total, 512 valid responses were collected from respondents without autonomous bus experience, all via online surveys. For respondents with riding experience, 457 valid responses were obtained, including 342 from online surveys and 115 from offline surveys.
Descriptive Analysis
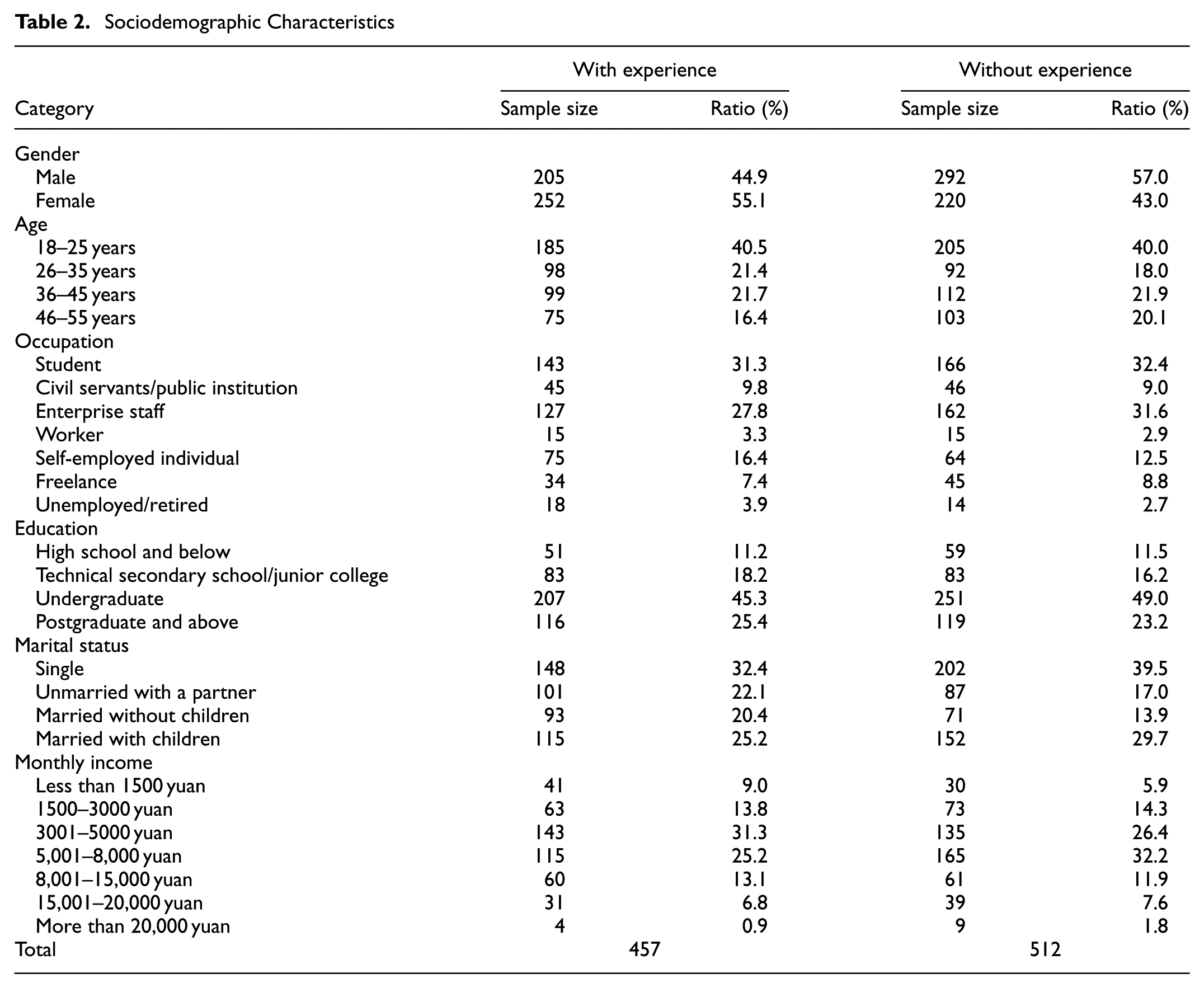
The descriptive statistics of the sample’s sociodemographic characteristics are presented in Table 2. Overall, the gender distribution of respondents was approximately balanced. Among those who had taken an autonomous bus, females slightly outnumbered males, whereas among those without riding experience, males slightly outnumbered females. The age distribution was skewed toward younger individuals, with the majority aged 18–25 years, and all respondents were under 55 years old. Concerning occupation, students accounted for the largest proportion, followed by enterprise staff. In relation to educational attainment, respondents were generally well educated, with the majority holding a bachelor’s degree. Analysis of marital status showed that unmarried individuals constituted the largest group. Monthly personal income was primarily below CNY 8,000. As the capital city of Jiangsu Province, Nanjing hosts numerous universities and enterprises. According to the Statistical Bulletin of National Economic and Social Development, the per capita disposable income of all residents in Nanjing in 2024 was CNY 75,180. These figures indicate that the sample in this study adequately reflects the overall characteristics of the Nanjing population.
Sociodemographic Characteristics
Reliability and Validity Analysis
The reliability analysis results are presented in Table 3. The Cronbach’s alpha coefficients for all dimensions ranged from 0.7 to 1.0, indicating that the scales used in this study demonstrate good internal consistency.
Reliability Analysis
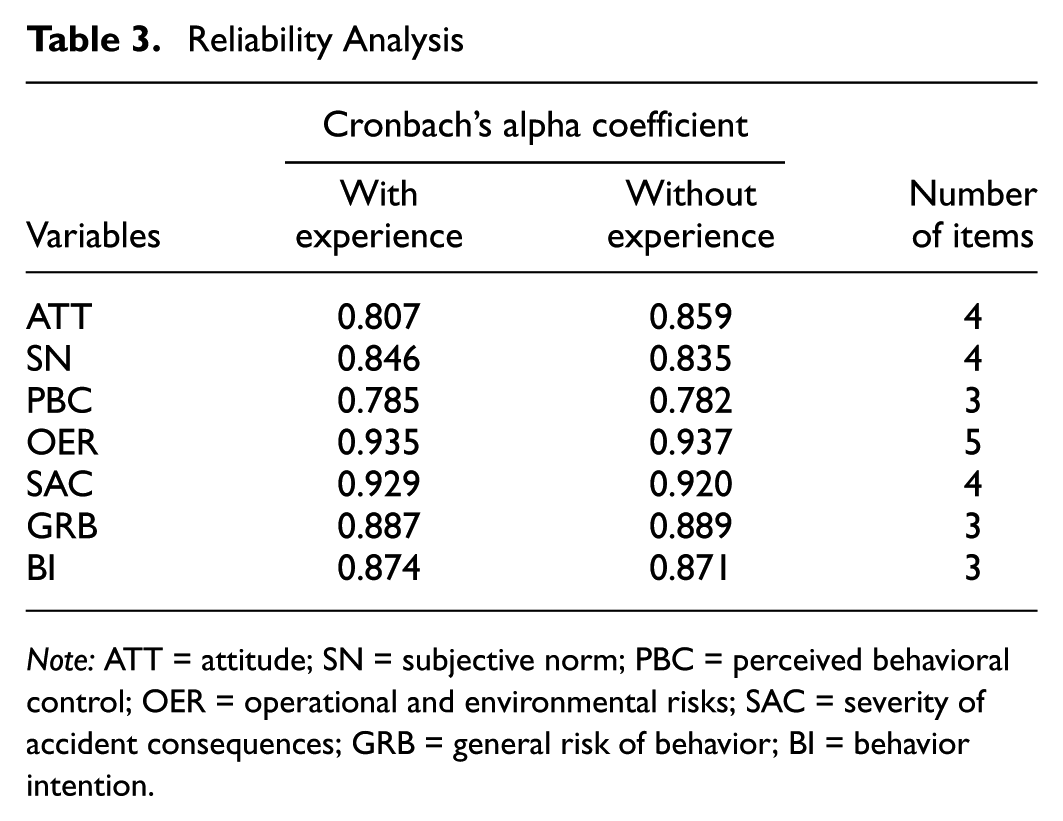
Note: ATT = attitude; SN = subjective norm; PBC = perceived behavioral control; OER = operational and environmental risks; SAC = severity of accident consequences; GRB = general risk of behavior; BI = behavior intention.
Table 4 presents the measurement indicators, reference standards ( 39 ), and observed results from the confirmatory factor analysis (CFA) conducted in this study. The model fit indices for respondents with and without autonomous bus riding experience were as follows: the chi-square to degrees of freedom ratio (CMIN/DF) was 1.222 and 1.086, respectively, both within the acceptable range of 1–3. The root mean square error of approximation (RMSEA) values were 0.022 and 0.013, and the standardized root mean square residual (SRMR) values were 0.031 and 0.029, all below the recommended threshold of 0.05. The incremental fit index (IFI), Tucker–Lewis index (TLI), and comparative fit index (CFI) all exceeded 0.9. These results indicate that the questionnaire and CFA model used in this study demonstrate good fit.
Validity Analysis
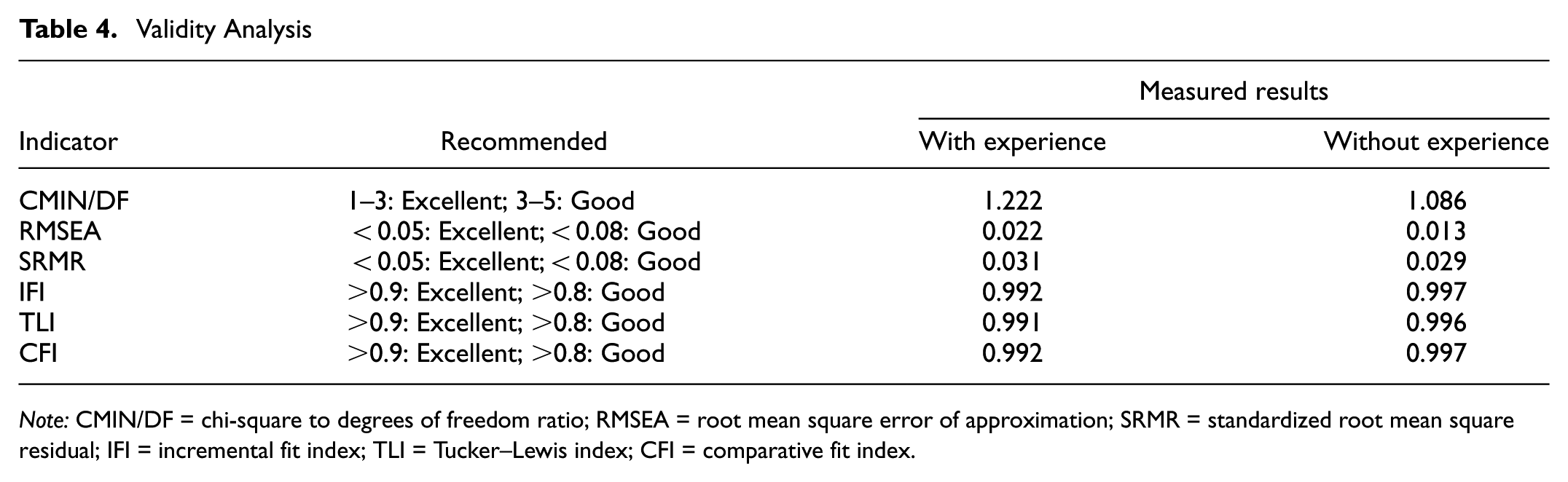
Note: CMIN/DF = chi-square to degrees of freedom ratio; RMSEA = root mean square error of approximation; SRMR = standardized root mean square residual; IFI = incremental fit index; TLI = Tucker–Lewis index; CFI = comparative fit index.
The average variance extracted (AVE) and composite reliability (CR) of the questionnaire were examined, and the results are presented in Table 5. All dimensions of the questionnaire had AVE values greater than 0.5 and CR values greater than 0.7, indicating good convergent validity and CR for each construct.
Test of Convergent Validity and Composite Reliability
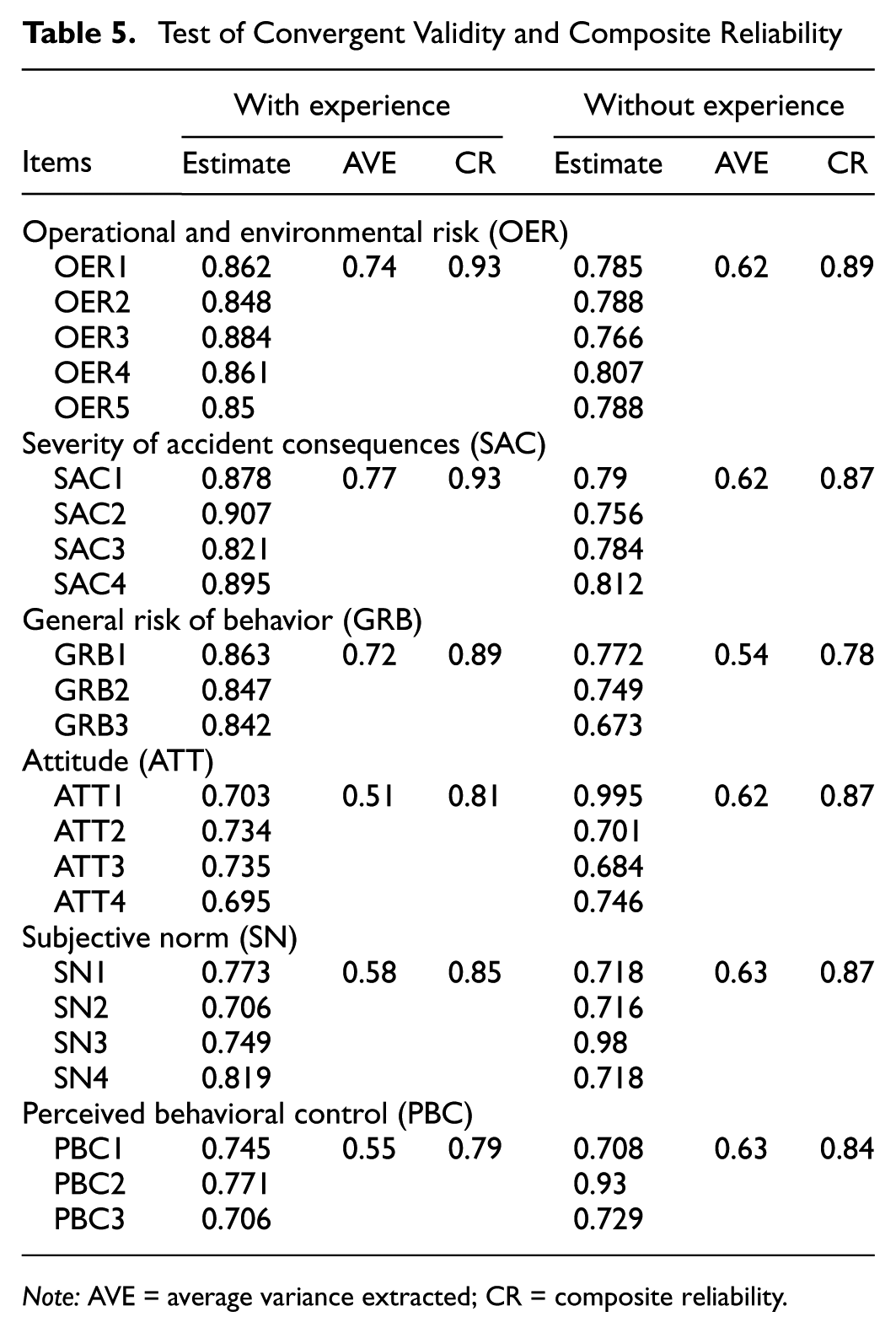
Note: AVE = average variance extracted; CR = composite reliability.
Discriminant validity is commonly evaluated using the Fornell–Larcker criterion, which requires that the square root of the AVE for each construct be greater than its correlations with other constructs ( 40 ). The results are presented in Table 6. The results indicate that, for both respondents who have experienced the autonomous bus service and those who have not, the correlation coefficients among all latent constructs are lower than the square roots of their corresponding AVE values. This demonstrates that the measurement model exhibits satisfactory discriminant validity across both subsamples. Therefore, the survey data are considered suitable for subsequent empirical analysis.
Discriminant Validity Test
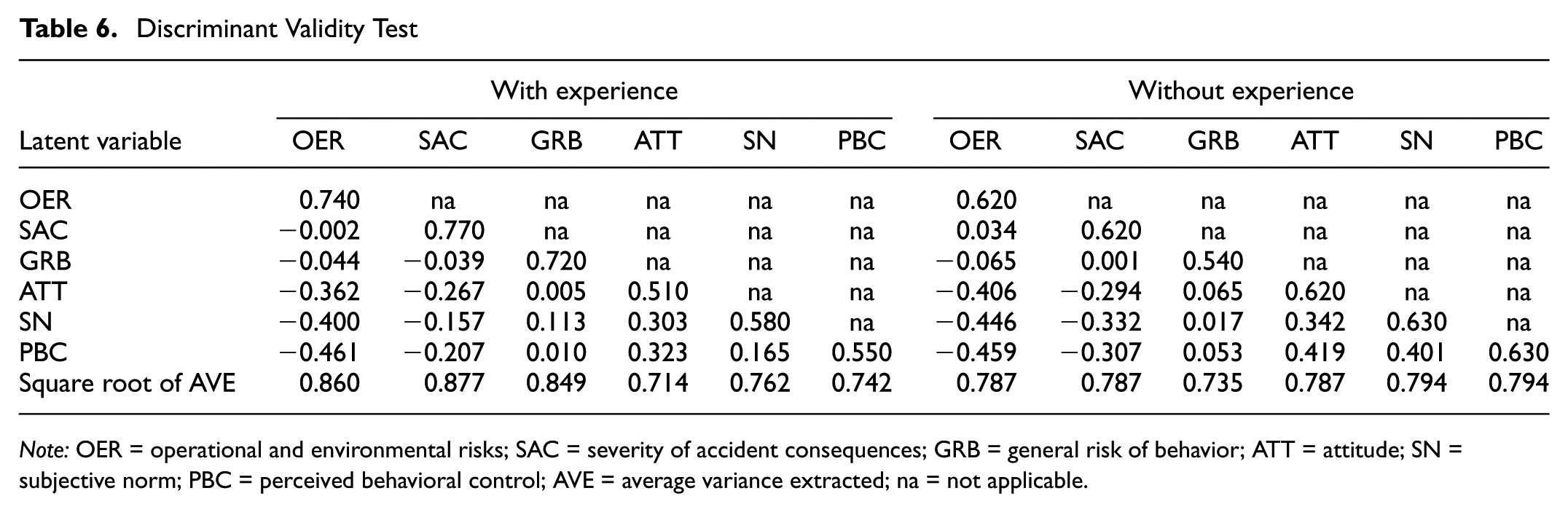
Note: OER = operational and environmental risks; SAC = severity of accident consequences; GRB = general risk of behavior; ATT = attitude; SN = subjective norm; PBC = perceived behavioral control; AVE = average variance extracted; na = not applicable.
Results
SEM Results
To examine differences between respondents with and without autonomous bus riding experience, separate models were estimated for each group to test the proposed hypotheses. The final SEM is shown in Figure 2, and the model fit indices are presented in Table 7. All fit indices met the criteria for excellent model fit.
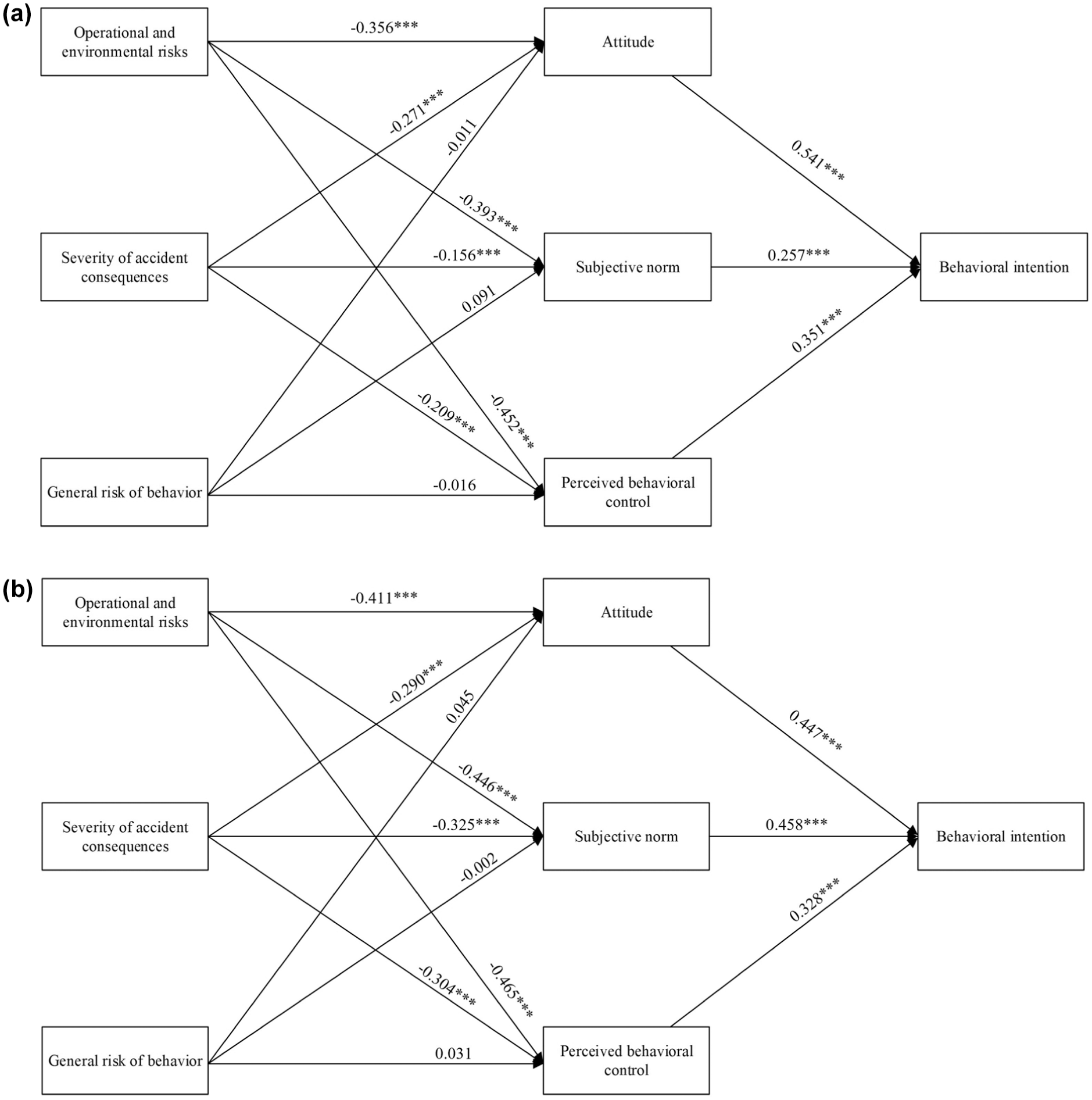
Structural equation modeling results: (a) with experience, and (b) without experience.
Model Fitting Parameters
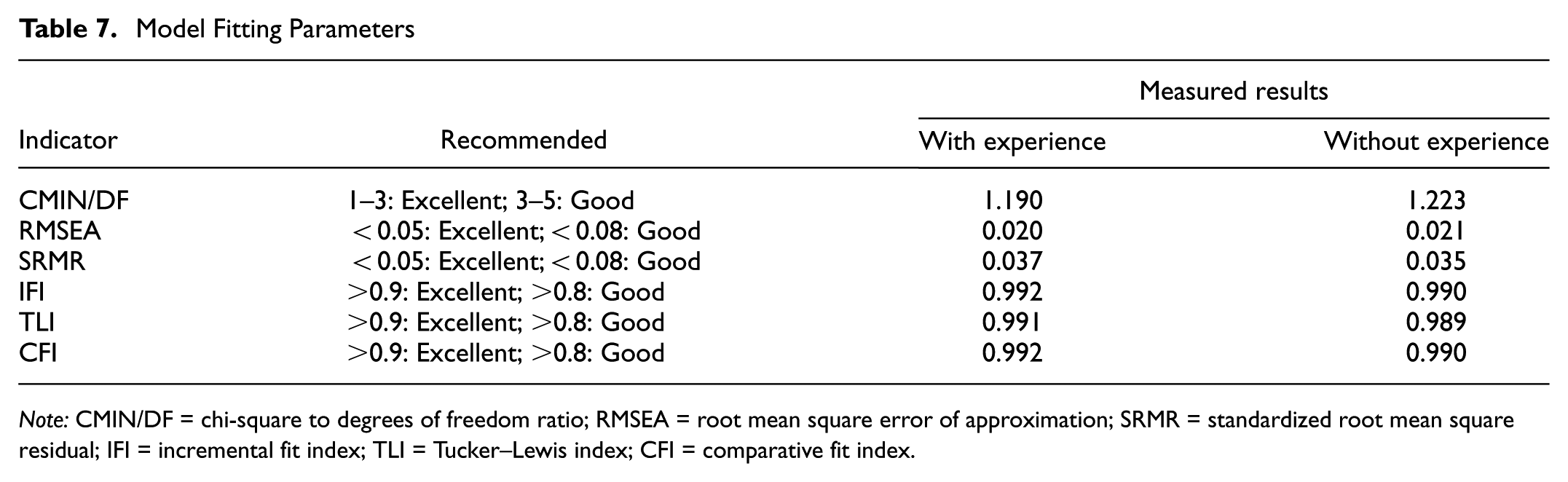
Note: CMIN/DF = chi-square to degrees of freedom ratio; RMSEA = root mean square error of approximation; SRMR = standardized root mean square residual; IFI = incremental fit index; TLI = Tucker–Lewis index; CFI = comparative fit index.
Analysis of Differences Considering Riding Experience
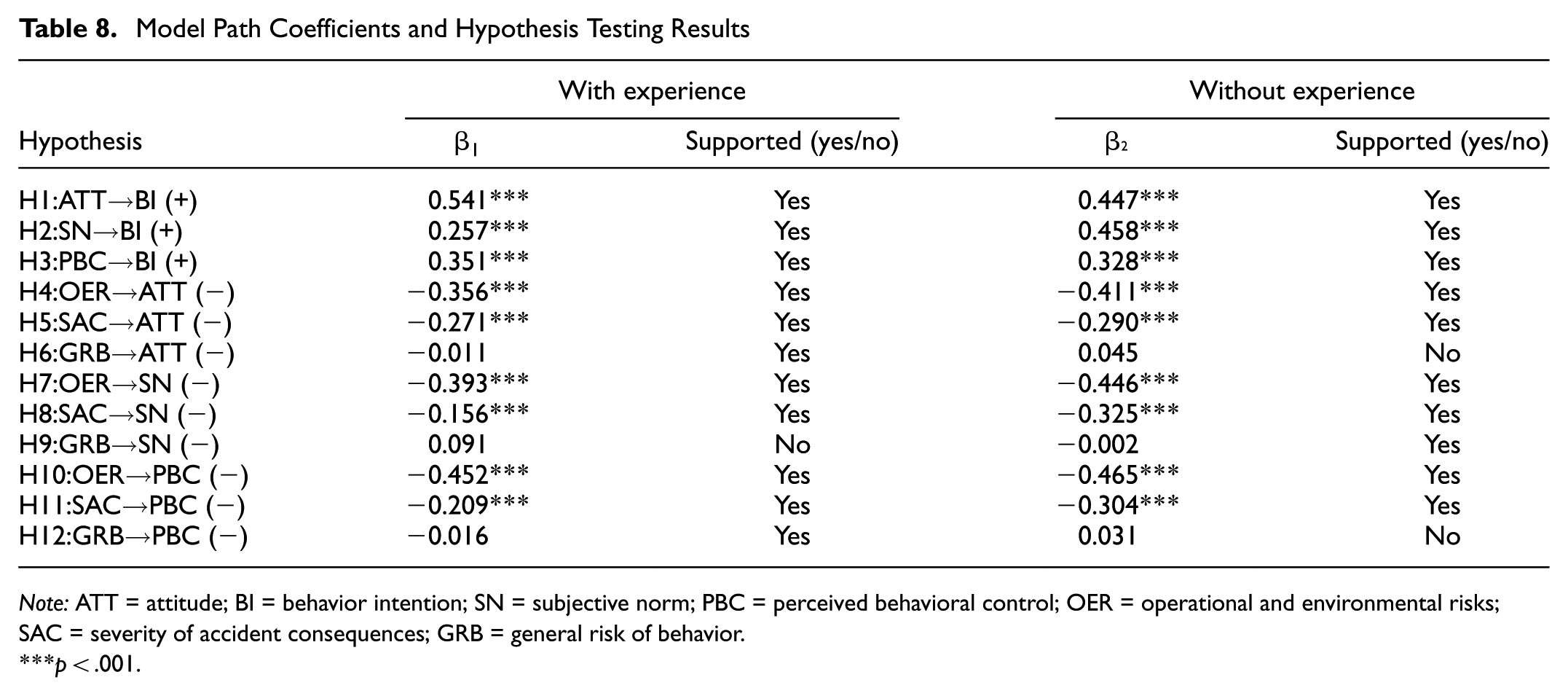
The path coefficients for respondents with and without riding experience are presented in Table 8. The results indicate that, regardless of riding experience, operational and environmental risks (OER) had a significant negative effect on attitude (ATT) (
Model Path Coefficients and Hypothesis Testing Results
Note: ATT = attitude; BI = behavior intention; SN = subjective norm; PBC = perceived behavioral control; OER = operational and environmental risks; SAC = severity of accident consequences; GRB = general risk of behavior.
p < .001.
The analysis of the model outputs indicates that, regardless of whether respondents had taken an autonomous bus, ATT, SN, and PBC all had significant positive effects on BI. Specifically, when ABs are perceived as more convenient and comfortable, and ticket prices are lower, public acceptance is higher. The positive effect of SN on BI is primarily driven by the influence of family and friends, media coverage, and policy support. When users’ close contacts are willing to try ABs, they are more likely to try them as well. Similarly, more positive media coverage and a greater number of supportive policies and incentives increase the likelihood of users choosing to take ABs. PBC in this study includes both the level of technological understanding and the degree of trust in the technology. Therefore, individuals with higher knowledge and trust concerning autonomous bus technology are more willing to accept it. In addition, when individuals perceive that they have control over the decision to use the technology, their acceptance is also higher.
Furthermore, OER and SAC indirectly influence BI through their negative effects on ATT, SN, and PBC. OER in this study refers to the ability of ABs to operate safely under adverse conditions, such as unclear road markings, road debris, or severe weather. The results indicate that when individuals perceive that ABs cannot adequately respond to such unexpected negative conditions, their acceptance of the technology is indirectly reduced. Similarly, concerning the SAC, if people believe that an accident involving an autonomous bus could result in greater economic losses, casualties, or negative public opinion, their willingness to accept the technology decreases.
Concerning GRB, we initially hypothesized that GRB would have a negative effect on ATT, SN, and PBC. In other words, if individuals believe that ABs require additional safety measures, such as safety personnel or seat belts, this would indicate higher perceived risk and consequently lower acceptance. However, the results show that GRB did not have a significant effect on ATT, SN, or PBC. Specifically, the effects of GRB on ATT and PBC among respondents without riding experience, and the effect of GRB on SN among respondents with riding experience, did not support the original hypotheses. We interpret this finding as follows: the GRB measured in this study primarily reflects normative and safety-awareness-related risk perceptions, such as the need to pay attention to road conditions, use seat belts, and consider safety personnel indispensable. Its essence is closer to safety discipline and a sense of responsibility rather than a direct negative evaluation of ABs. Therefore, when respondents endorse these views, it may not reflect a negative attitude toward ABs, but rather a cautious stance toward new technology while still perceiving it as capable of safe operation under normative constraints. Consequently, some path coefficients turned positive. In essence, regardless of whether individuals accept ABs, they generally regard the presence of safety personnel, seat belts, or other auxiliary safety measures as common-sense practices rather than unique risk concerns specific to ABs, which explains the relatively small magnitude of these coefficients.
Comparing the influence paths on public acceptance between respondents with and without riding experience reveals several differences. For individuals without riding experience, the positive effect of SN on BI is stronger (
In addition, for individuals without riding experience, OER has a stronger negative effect on ATT, SN, and PBC. This indicates that, compared with individuals with riding experience, individuals without riding experience lack direct understanding of technological reliability and tend to imagine higher risks, making them more concerned about whether ABs can safely respond to adverse conditions such as severe weather, road debris, and sudden pedestrians or vehicles. In contrast, passengers’ direct experience reduces uncertainty. Similarly, the SAC has a stronger negative effect on ATT, SN, and PBC for individuals without riding experience. Because of lower familiarity with autonomous technology and exposure to negative media reports, they tend to overestimate the consequences of accidents. Individuals with riding experience, however, observe that safety measures are well implemented, operational speeds are low, and risks are controllable, leading to a lower perception of risk.
Analysis of Result Differences across Socioeconomic Characteristics
To further examine the differences between individuals who have taken an autonomous bus and those who have not, the sample was grouped according to different socioeconomic characteristics, and group-specific differences in the results were analyzed. The model fit indices for the different group models are reported in Table 9, and all models meet the recommended fit criteria.
Parameters for Model Fit of Different Groups
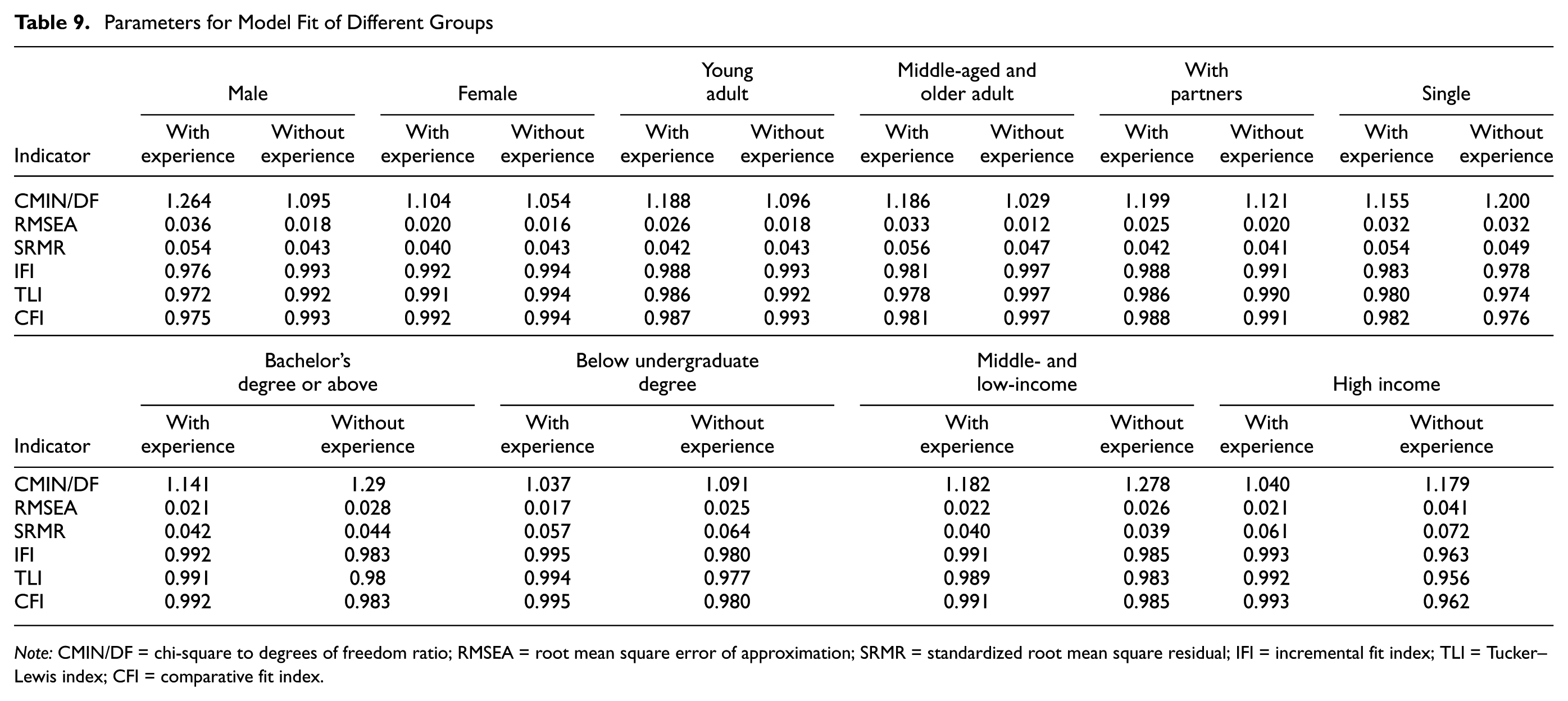
Note: CMIN/DF = chi-square to degrees of freedom ratio; RMSEA = root mean square error of approximation; SRMR = standardized root mean square residual; IFI = incremental fit index; TLI = Tucker–Lewis index; CFI = comparative fit index.
Table 10 presents the path coefficients and hypothesis testing results for the models across different groups. As shown in Table 10, overall, the negative effects of OER and SAC on ATT, SN, and PBC, as well as the positive effects of ATT, SN, and PBC on BI, are consistent with the original hypotheses. However, concerning the effects of GRB on ATT, SN, and PBC, some groups support the hypotheses while others do not. When comparing the magnitude of effects between respondents who had taken an autonomous bus and those who had not, the results indicate that, across all groups, the positive effect of ATT on BI is stronger among individuals who had taken an autonomous bus, whereas the positive effect of SN on BI is weaker. These findings are consistent with those obtained from the overall analysis. However, for the positive effect of PBC on BI and the negative effects of OER and SAC on ATT, SN, and PBC, certain group-specific results differ from those observed in the ungrouped model. Therefore, in the following section, we further examine the different effects of the various factors across groups.
Path Coefficients and Hypothesis Testing Results of Different Group
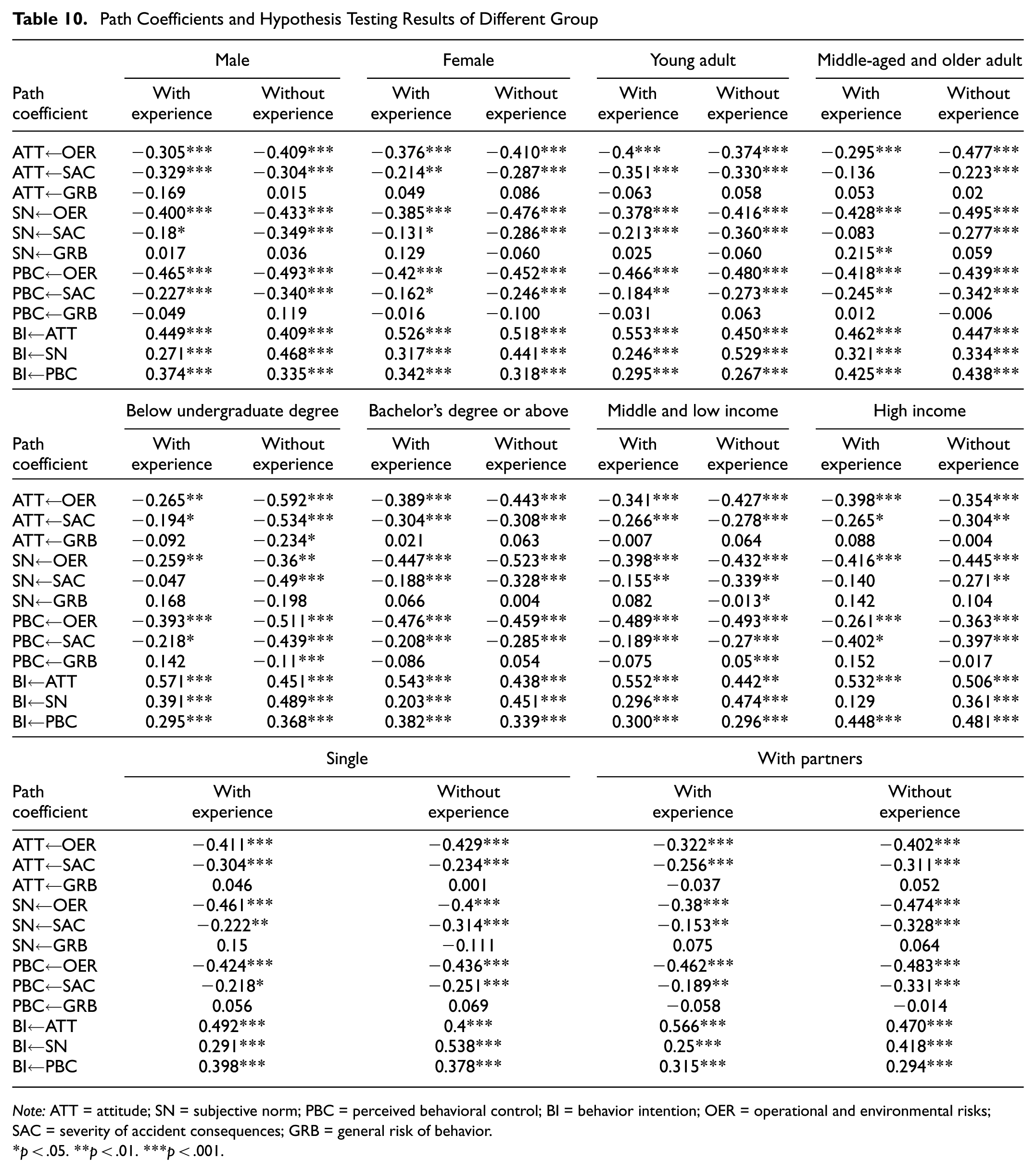
Note: ATT = attitude; SN = subjective norm; PBC = perceived behavioral control; BI = behavior intention; OER = operational and environmental risks; SAC = severity of accident consequences; GRB = general risk of behavior.
*p < .05. **p < .01. ***p < .001.
Differences across Gender Groups
A comparison between the male and female groups shows that ATT exerts a stronger influence on BI among females. This indicates that, compared with males, females place greater emphasis on experiential aspects, such as comfort and convenience. Concerning the effect of SN on BI, among respondents who had taken an autonomous bus, females are more likely than males to be influenced by media, peers, and policy guidance. In contrast, among those who had not taken an autonomous bus, males are more easily influenced than females. This suggests that riding experience is more likely to alter the extent to which media, peers, and policy affect males’ acceptance of ABs. With respect to the magnitude of the positive effect of PBC on BI, the effect is stronger in the male group, implying that males’ usage intentions rely more on their perceived trustworthiness and controllability of the technology. When males believe that autonomous bus technology is reliable and easy to operate, they are more inclined to express a strong intention to use it. This finding aligns with existing literature, which generally reports that males tend to exhibit higher levels of trust in technology and thus hold more favorable attitudes toward AVs, whereas females are more prone to experiencing anxiety toward autonomous driving technologies ( 41 ). Therefore, auxiliary safety measures may be needed to enhance females’ perceived safety when using ABs.
Differences across Age Groups
For younger respondents, regardless of whether they had previously taken an autonomous bus, the influence of PBC on BI is significantly weaker than that observed in older groups, whereas the influence of ATT on BI is stronger. This indicates that young people’s decisions to use ABs are not primarily driven by perceived controllability or ease of use, but rather by their overall attitudes toward the technology and their experiential evaluations. Because younger individuals generally perceive few difficulties in using ABs, the explanatory power of PBC is diminished. In contrast, older adults may hold greater concerns about autonomous bus technologies, which is consistent with existing research findings ( 1 ). Moreover, among younger respondents, the degree to which external factors influence BI is substantially higher for those who have not taken an autonomous bus compared with those who have, suggesting that young people are more easily influenced by external information when forming initial judgments about new technologies. However, once they have firsthand experience, although external factors continue to shape their behavioral intentions, their influence becomes less pronounced. In comparison, for older respondents, whether or not they have previously taken an autonomous bus, the effect of external information such as opinions from friends, media reports, and public discourse remains generally consistent. This pattern reflects that older adults’ concerns about autonomous bus technologies are shaped not only by their own understanding of the technology but also by broader social considerations. Accordingly, older users’ acceptance of new technologies often requires stronger social support and validation ( 42 ).
Differences across Educational Levels
A comparison of groups with different educational backgrounds shows that the influence of ATT on BI is weaker among respondents with a bachelor’s degree or above. This reflects the more diversified decision-making processes of highly educated individuals, who tend to possess a more comprehensive and rational understanding of autonomous driving technologies. In addition to attitudes, they also consider factors such as reliability and controllability. Therefore, the effect of ATT alone on BI is relatively reduced. By contrast, SN exerts a stronger influence on BI among respondents with lower educational levels. This suggests that when family, peers, media, and policy convey more positive signals, individuals with lower educational attainment are more strongly influenced. Existing research similarly indicates that individuals with higher education levels tend to have better knowledge of autonomous driving technologies and consequently may demonstrate higher acceptance ( 41 ).
Differences across Income Levels
A comparison of respondents with different income levels shows that ATT and PBC exert stronger or similar influences on BI among high-income individuals, whereas SN has a stronger influence among middle- and low-income groups. This indicates that high-income respondents exhibit higher acceptance and trust in ABs, place greater emphasis on comfort and convenience, and are less likely to be influenced by peers, media, or policy. High-income groups are better able to absorb the costs and risks associated with new technologies and tend to have stronger preferences for time efficiency and convenience, leading to higher acceptance of autonomous driving technologies. In addition, among middle- and low-income respondents who have not taken an AB, GRB demonstrates a significant positive effect on PBC. This finding may indicate that, for these groups, the belief that ABs require auxiliary safety measures, such as onboard safety staff or seat belts, helps enhance their perceived trust and sense of control concerning the technology ( 41 ).
Differences across Marital Status
For respondents with partners, the influence of ATT on BI is stronger than for single respondents. This indicates that individuals with partners tend to base their travel decisions more on their overall evaluations and perceptions of ABs. They place greater emphasis on comfort, convenience, and potentially the shared experience of riding with their partners, making positive attitudes a key driver of behavioral intention. In contrast, PBC exerts a stronger influence on BI among single respondents, suggesting that their decisions to use ABs are driven primarily by personal perceptions of controllability and ease of use. Because single individuals typically travel independently, they are more concerned with whether they can conveniently operate or adapt to the technology, rather than external evaluations or the experiences of others. The results for SN also indicate that single respondents may be more susceptible to external influences when forming their intention to adopt autonomous bus services.
Conclusion and Discussion
Summary of Findings
As an emerging technology, ABs have the potential to effectively alleviate traffic congestion, improve travel efficiency, and enhance road safety. However, their widespread adoption remains some distance away. Beyond the ongoing refinement and advancement of autonomous driving technologies themselves, public acceptance of ABs is also a critical factor that cannot be overlooked. Drawing on the TPB, this study provides a systematic and comprehensive analysis of the public acceptance of ABs.
Building on the TPB, this study extends the model by incorporating perceived risk and decomposing it into three dimensions: OER, SAC, and GRB. An extended TPB framework was thus constructed. Using a mixed online–offline survey approach, we collected questionnaire data from respondents who had previously taken ABs and those who had not. SEM was employed to examine the key determinants influencing the acceptance of ABs in these two groups, as well as the differences between them. Furthermore, respondents were categorized into subgroups based on gender, age, education level, income, and marital status to explore how socioeconomic characteristics shape acceptance of ABs. The main conclusions of this study are as follows:
The model estimation results indicate that, regardless of whether individuals have previously taken an autonomous bus, all hypothesized relationships in this study are supported except for the effect of GRB on acceptance, which is not significant. A possible explanation is that whether or not people accept ABs, they generally consider auxiliary safety measures, such as seat belts and onboard safety attendants, to be essential. OER and SAC exert significant negative effects on BI, suggesting that when individuals believe ABs are unable to handle unexpected events, and when they perceive the potential casualties, economic losses, and public opinion impacts of autonomous bus accidents to be more severe, they become less willing to accept this technology. Conversely, ATT, SN, and PBC show significant positive effects on acceptance, indicating that when ABs are perceived as more comfortable, convenient, and safe, and when feedback from family, friends, media, and policy environments is more favorable, people are more inclined to accept ABs.
By comparing the acceptance path models of individuals who have taken ABs with those who have not, we find that the former group is less influenced by family, friends, media, and policy. This may be because, as a novel technology, those who have taken ABs are likely among the first in their social circles to experience them. For individuals who have taken an autonomous bus, the positive effects of ATT and PBC are stronger. A plausible explanation is that these individuals possess direct knowledge and firsthand experience of how autonomous driving technologies operate in practice. Such experience makes them pay greater attention to the actual performance of ABs. In contrast, for individuals who have never taken an autonomous bus, OER and SAC exert stronger negative effects on ATT, SN, and PBC. This indicates that compared with those who have prior experience, individuals without riding experience are more concerned about whether ABs can effectively respond to adverse conditions such as severe weather, road debris, or the sudden appearance of pedestrians and other vehicles.
Further analysis of differences between individuals with different sociodemographic characteristics, distinguishing between those who have taken an autonomous bus and those who have not, shows that the negative effects of OER and SAC on ATT, SN, and PBC, as well as the positive effects of ATT, SN, and PBC on BI, are generally consistent with the overall findings. However, among middle- and low-income respondents who have not taken an autonomous bus, GRB has a significant positive effect on PBC. A possible explanation is that current autonomous bus safety measures may not sufficiently enhance passengers’ sense of security. For these groups, the belief that additional auxiliary safety measures are necessary increases their acceptance of ABs. Moreover, differences in the influence paths across groups are also observed. Younger individuals, because of their higher receptiveness and trust in new technologies, show a weaker impact of PBC on BI compared with older individuals. In addition, compared with single respondents, those with partners exhibit a stronger effect of ATT on BI and weaker effects of SN and PBC on BI.
Policy Recommendations
Based on the findings of this study, several recommendations are proposed to enhance public acceptance of ABs.
The results indicate that, for both groups, those who have experienced the autonomous bus service and those who have not, SN exerts a significant positive effect on BI. Combined with the questionnaire items designed to measure SN, it can be inferred that public acceptance of ABs is influenced by external social factors, including opinions from relatives and friends, media coverage, and policy signals. From a governmental perspective, policy-related factors show a significant impact on public acceptance. Supportive and proactive policies are particularly effective in enhancing users’ willingness to adopt autonomous bus services, thereby facilitating their broader promotion and implementation. Therefore, for government authorities, it is essential to improve relevant laws and regulations, establish stringent safety standards and technical specifications, and ensure the safety of autonomous bus operations. In particular, regulatory requirements for data security and privacy protection must be clearly defined, and cybersecurity standards for autonomous driving systems should be established ( 1 ). At the same time, the model results indicate that the positive effect of SN on BI is stronger among respondents who have not previously experienced the autonomous bus service. Pilot projects should be implemented in different cities and traffic environments to provide the public with more opportunities to experience ABs, thereby reducing unfamiliarity and distrust toward the technology. A transparent accident reporting and emergency response mechanism should also be developed.
Governments should strengthen public education efforts in schools, communities, and media platforms to enhance public understanding and trust in autonomous bus technologies, which can effectively increase acceptance. In addition, authorities should establish well-functioning public consultation and complaint channels to promptly address concerns and questions from the public, thereby increasing transparency and trust. The model results indicate that lower ticket prices for autonomous bus services are associated with higher levels of public acceptance. Government agencies may also introduce supportive policies, such as fare subsidies for users and financial incentives for enterprises, to ensure sustained technological development and innovation in autonomous bus systems.
Meanwhile, the model results show that PBC has a significant positive effect on BI for both respondents who have experienced the autonomous bus service and those who have not. This finding suggests that the level of trust and perceived control over the technology constitutes a crucial determinant of individuals’ willingness to adopt autonomous bus services. Therefore, for enterprises, it is essential to continuously optimize and improve autonomous bus technologies, enhance safety performance in complex traffic environments, and place greater emphasis on improving ride comfort. Concerning the effect of GRB, our original hypothesis posited that GRB would exert a negative influence on ATT, SN, and PBC. However, the model results indicate that three specific paths do not support this hypothesis: the effect of GRB on ATT and on PBC among respondents who have not experienced the autonomous bus service, and the effect of GRB on SN among those who have experienced it. These findings suggest that, regardless of whether individuals have previously used the autonomous bus service, safety measures such as the presence of a safety operator, seat belts, or other auxiliary protective arrangements are perceived as common-sense precautions rather than as responses to risks uniquely associated with ABs. In other words, such measures are viewed as standard safety practices rather than signals of heightened technological uncertainty. Accordingly, it is recommended that appropriate auxiliary safety measures be implemented during the operation of autonomous bus services, particularly in the initial deployment stage, to enhance passengers’ perceived sense of safety and facilitate public acceptance.
Research Prospects
With the continuous advancement of autonomous driving technologies, both the level of technological maturity and the degree of societal acceptance may vary across different stages. Future research can build on the conclusions of this study by continuously tracking and analyzing changes in public acceptance of ABs across various phases of technological development. For instance, during the early stage of technology adoption, the public may place greater emphasis on safety and reliability. As the technology gradually matures, factors such as comfort and convenience may become more salient. Longitudinal research would enable a more comprehensive understanding of how technological progress influences public acceptance, and provide more forward-looking insights for policymakers and enterprises.
Beyond perceived risk and the primary factors in the TPB framework, other potential determinants, such as personality traits and lifestyle habits, also merit further investigation ( 43 ). Future research could extend the theoretical model by incorporating additional relevant variables and applying models such as TAM, UTAUT, and UTAUT2 to conduct broader analyses. This would support the development of a more comprehensive and sophisticated analytical framework to better explain public acceptance of ABs. Comparing the explanatory power of different models could also provide policymakers and industry stakeholders with more diverse insights to support technology diffusion.
Given that the current real-world deployment of ABs remains relatively limited, passengers with riding experience are likely to represent early adopters in the technology diffusion process. These individuals typically possess higher technological acceptance, stronger risk tolerance, and a greater willingness to explore new innovations. Consequently, their more favorable attitudes and lower risk perceptions toward ABs may not necessarily reflect the views of the general public. This implies that results derived from experienced users may systematically overestimate the overall societal acceptance of ABs while underestimating potential barriers and concerns that may arise during large-scale implementation. Although the observed differences between two groups in this study offer practical value for policy formulation and market deployment strategies, future research could continue to expand sample size and more thoroughly account for potential disparities between early adopters and mainstream users. This would provide more robust evidence to guide policymaking and promotional strategies for the widespread adoption of ABs.
In addition, regional and cultural differences may also exert significant influence on public acceptance. Future studies could account for variations in acceptance of ABs across different geographic areas, cultural contexts, and socioeconomic conditions. In particular, more in-depth comparative research is needed between regions with substantial disparities, to better understand regional heterogeneity. Such analyses would help inform the development of promotion strategies that are more locally tailored and culturally adaptive.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: Wenyun Tang, Qingyu Deng, and Minyi Fu; data collection: Minyi Fu and Yang Tao; analysis and interpretation of results: Wenyun Tang, Qingyu Deng, Minyi Fu, Yang Tao, and Gen Li; draft manuscript preparation: Wenyun Tang, Qingyu Deng, Minyi Fu, Yang Tao, Gen Li, and Lisha Shi. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Open Project of Key Laboratory of Automotive Measurement, Control and Safety under Grant QCCK2025-005.