
Abstract
Gears are major part of any rotating machinery. Gear fault diagnosis plays a crucial role in ensuring the reliable operation of rotating machinery. Vibration is the key parameter for gear fault diagnosis because gear faults produce repeated transient impulses in vibration signals. In this study, triboelectric nanogenerator (TENG) is utilized to capture these temporal vibration patterns under different gear conditions. Subsequently to diagnose the TENG fault data, this research introduces a new feature called as multiplex temporally-tuned singular value domain-graphs (MPlex-TSVG) that is derived using multiplex network theory and singular value decomposition (SVD) technique. The MPlex-TSVG first transforms the raw TENG signal into sequences of singular values extracted from localized time-scale segments using the SVD. Afterwards, the singular value-sequences are transformed into a network of graphs using multiplex graph approach that evaluates the inter-layer and intra-layer visibility between the distinct singular-value sequences. The MPlex-TSVGs thus obtained are classified via a graph convolutional network (GCN) model for distinguishing gear faults. This proposed approach is experimentally evaluated under two speed - and four dissimilar fault conditions on two different test setups and achieved high classification accuracies of 100% and 98.68% on the first setup dataset and 100% and 99% on the second setup dataset, respectively. In addition, it outperformed the existing methods using time-frequency images and convolutional neural network (CNN).
Keywords
Introduction
Gears are essential component of any rotating machinery used in any industries and different types of applications. It plays very crucial role in any production process and directly affects the overall performance of any machinery. Damaged gears can lead to several issues like sudden machinery breakdowns and excessive maintenance. In addition, damaged gears cause uneven load distribution, which accelerates the wear and tear of any nearby components such as bearings and shafts.1–4 Thus, gear fault detection and timely maintenance are essential for ensuring machine reliability and work safety. Traditional techniques for gear fault detection are mainly dependent on vibration analysis and acoustics measurements.5,6 Vibration sensors i.e. accelerometers generally monitor gear vibrations while acoustic sensors acquire sound waves to identify faults. 7 However, these sensors have certain limitations such as they require external power to work, are relatively expensive, and harmful to environment due to use of chemical batteries. To address these challenges, a sustainable green energy solution is required, that converts random mechanical energy into electrical signals. In this regard, triboelectric nanogenerators (TENGs) appear as a promising alternative for gear fault detection, providing self-powering capabilities and a cost-effective solution. 8 TENG was developed in the year 2012 by Wang et al. 9 and uses the coupling effect of friction electrification and electrostatic induction to convert mechanical energy into electric signals. Faults in gears produce typical vibration patterns in the whole machine, which can be converted into electrical signals using TENGs. Recent research works successfully applied TENG signals for fault diagnosis of typical machine elements like gears and bearings. Dong et al. 10 developed an AI-enabled rolling-TENG (B-TENG) for bearing wear diagnosis, targeting digital twin applications. They applied seasonal and trend decomposition analysis along with the convolutional neural network (CNN) to analyze triboelectric current waveforms. In their another work, 11 they developed a flexible polytetrafluoroethylene (PTFE) film-based-TENG sensor to collect ball bearing defect data and diagnosed the bearing condition by applying machine learning techniques. Gao et al. 12 developed a hybrid sensor integrating electromagnetic (EMG), piezoelectric (PEG), and TENG for effective vibration energy harvesting and self-powered gear condition monitoring. They used binary tree support vector machine (BT-SVM) to process the corresponding electrical signals and recognize different gear faults. Han et al. 13 inserted PTFE films into different bearing structures with varying materials for the rolling balls to form the TENG and collect the fault data. Deep learning algorithms, namely, CNN, Attention CNN, dilated CNN and ResNet-18 were utilized to evaluate the associated electrical output for classifying faults. Qin et al. 14 developed a triboelectric linear bearing sensor for self-powered condition monitoring and detect faulty patterns through wavelet transform and CNN. Hu et al. 15 fabricated a TENG with PTFE film on both inner and outer rings of bearings to identify misalignment faults in a multi-span rotor system. The TENG current signals were used as inputs to train different convolutional network structures and it was found that ResNet-18 provided the highest accuracy of 90.8%. Han et al. 16 proposed a pre-bent fluorinated ethylene propylene membrane-based disk-type TENG (PM-DTENG) for fault diagnosis in defective bearings and gears. They utilized CNN to discover fault patterns in TENG data and achieved 92% classification accuracy. Xie et al. 17 proposed a Triboelectric Planetary Gear Sensor (TPGS) sensor that is fabricated using a free standing TENG layer and comb-finger electrodes. The gear faults were then classified through a stacked autoencoder-based-CNN model. Li et al. 18 developed TENG-derived-self-powered sensor nodes to detect gear vibrations and further classified faults by using support vector machine (SVM) technique. Their TENG nodes were constructed using multiple layers of (Polyethylene Terephthalate) PET and copper as triboelectric materials and successfully produced a power output of 3.33 mW/m3. Considering the positive outcomes reported in these studies, this work used TENG to characterize the gear vibration.
Existing works highlight that the vibration signals are often processed by signal processing or AI methods to discover valuable features. The gear faults produce complex temporal patterns with highly nonlinear and non-stationary properties that are difficult to arrest in the raw time domain. In this work, a novel feature referred to as multiplex temporally-tuned singular value domain-graphs (MPlex-TSVG) is proposed to extract the fault information embedded into gear-signals. The MPlex-TSVG is based on a hybrid of multilayer network theory and SVD technique. The multilayer network theory has been utilized to model complex data through graph-based-representations in various fields such as analyzing social networks,
19
modeling gas-liquid flow behavior,
20
detecting brain activities,
21
determining real estate prices,
22
and pipeline leak detection.
23
The multilayer graph theory assesses the system behaviour by developing a network of graphs among different system-variables instead of relying on a single graph. On the other hand, SVD has been successfully applied for feature extraction from vibration data produced by rotating machines.24–26 SVD has shown strong performance in separating the signal subspaces from that of the noise and the associated singular values have been effectively used to characterize the fault-induced impulses. Considering the excellent abilities of these two techniques, the current research work combines them by first representing the signal information at multiple layers via SVD technique and then building a multi-layered graph across the different SVD layers. In the proposed MPlex-TSVG approach, the original TENG signals are first subjected to SVD process in a sliding-window manner that produces multi-layered sequences formed by multiple singular-values (SVs) of different orders. Then, the multi-layered SV-sequences are converted into a network of graphs using the multilayer network technique. To achieve this, the concept of visibility graph is utilized. Visibility graph (VG) is a very dominant feature extraction technique and has been used to evaluate machine vibration signals.27,28 VGs ascertain the complex fault patterns by converting the time-series data into graph structures. However, the conventional VGs applies only to univariate time-series and becomes ineffective in handling multivariate time-series data such as the one discussed above. This shortcoming is effectively handled by employing multilayer network theory which is yet another advantage of the proposed approach. The multilayer networks are capable of modelling the encoded connections among the multivariate SV–sequences resulting in a comprehensive graph structure containing the relevant signal information. The MPlex-TSVGs can be further examined to differentiate the different gear conditions. In the last few years, graph convolutional networks (GCNs) have demonstrated excellent performance in investigating faults in rotating machines.29,30 GCNs are very effective in identifying topological dependencies in graphs and revealing the graph properties through multiple layers of processing.
31
Thus, GCNs can be leveraged to extract hidden features from the MPlex-TSVG nodes and enable efficient recognition of fault patterns. Overall, the major contributions of this study are summarized as follows: (1) The primary contribution of this study is the development of a new fault feature extraction technique based on a combination of TENG-vibration signals and MPlex-TSVGs. The TENG sensor leverages triboelectric principles to produce electric signals, which in turn are evaluated by MPlex-TSVGs to recognize fault patterns. (2) The secondary contribution is to develop an automated gear fault diagnosis approach by integrating the TENG sensor output with the GCN technique. The GCN trains itself using the MPlex-TSVGs and models the complicated interactions among the nodes thereby resulting in accurate categorization of the healthy and faulty conditions. (3) The proposed technique i.e. the hybrid of TENG-based-MPlex-TSVG and GCN, is validated through new TENG-based-vibration datasets representing the gear health conditions. For this purpose, an experimental platform is developed and gears are tested under different fault patterns and speed conditions to collect the associated vibration data.
The remaining article is organized as follows. The technical background describes the basic techniques like SVD and GCN. The proposed methodology describes gear fault diagnosis including the fabrication of TENG sensor and MPlex-TSVG feature extraction. The test setups present mimicking gear faults. The attained results are describes in experimental results and insights, and comparative analysis is shown in comparisions. Finally, the study is concluded with the conclusion.
Technical background
Working principle of TENG
The TENG consists of layers of triboelectric materials with different electronegativities. When these layers come into contact, one material acquires electron and becomes negatively charged, while the other material loses electrons and becomes positively charged. This generates an electric potential difference between the triboelectric layers and the corresponding phenomenon is referred to as triboelectric effect. 32 The choice of material for triboelectric layers (electron acceptor and donor) becomes very important while fabricating the TENG. The most commonly utilized electron acceptor materials consist of Polytetrafluoroethylene (PTFE), polydimethyl-siloxane (PDMS), fluorinated ethylene propylene (FEP), Kapton etc. On other side, the electron donor materials include Aluminium (Al), Gold (Au), Polyethylene Terephthalate (PET), acrylics or Polymethyl Methacrylate (PMMA) etc. 33
There are four different operational modes for TENG: contact-separation, sliding mode, freestanding and single-electrode. The contact-separation and sliding modes are the fundamental modes while other two can operate in either sliding mode or contact-separation mode. As their names indicate, the contact-separate mode produces electricity due to two different triboelectric surfaces touching and separating from each other repeatedly while the sliding mode generates electricity by sliding of one triboelectric surface over another. In this study, a contact-separation mode TENG is fabricated to convert the vibration of gears into electrical voltage.
18
Figure 1 shows the functioning of a contact separation TENG where the two triboelectric layers are indicated by red and yellow colors. When the two triboelectric surfaces contact each other (State I), one layer becomes positively charged and other becomes negatively charged. Afterwards, when the two layers begin to separate (State II), an electrical potential difference is created and flow of electrons takes place across the layers. In fully separated state (State III), an equilibrium is attained and the potential difference becomes maximum. When the triboelectric layers travel to contact again (State IV), the potential difference is reversed causing the electrons to flow back in opposite direction. Now, this contact and separation cycle initiated by mechanical vibrations continues to generate electrical output that can be monitored to track the gear condition. Working principle of contact separation mode TENG.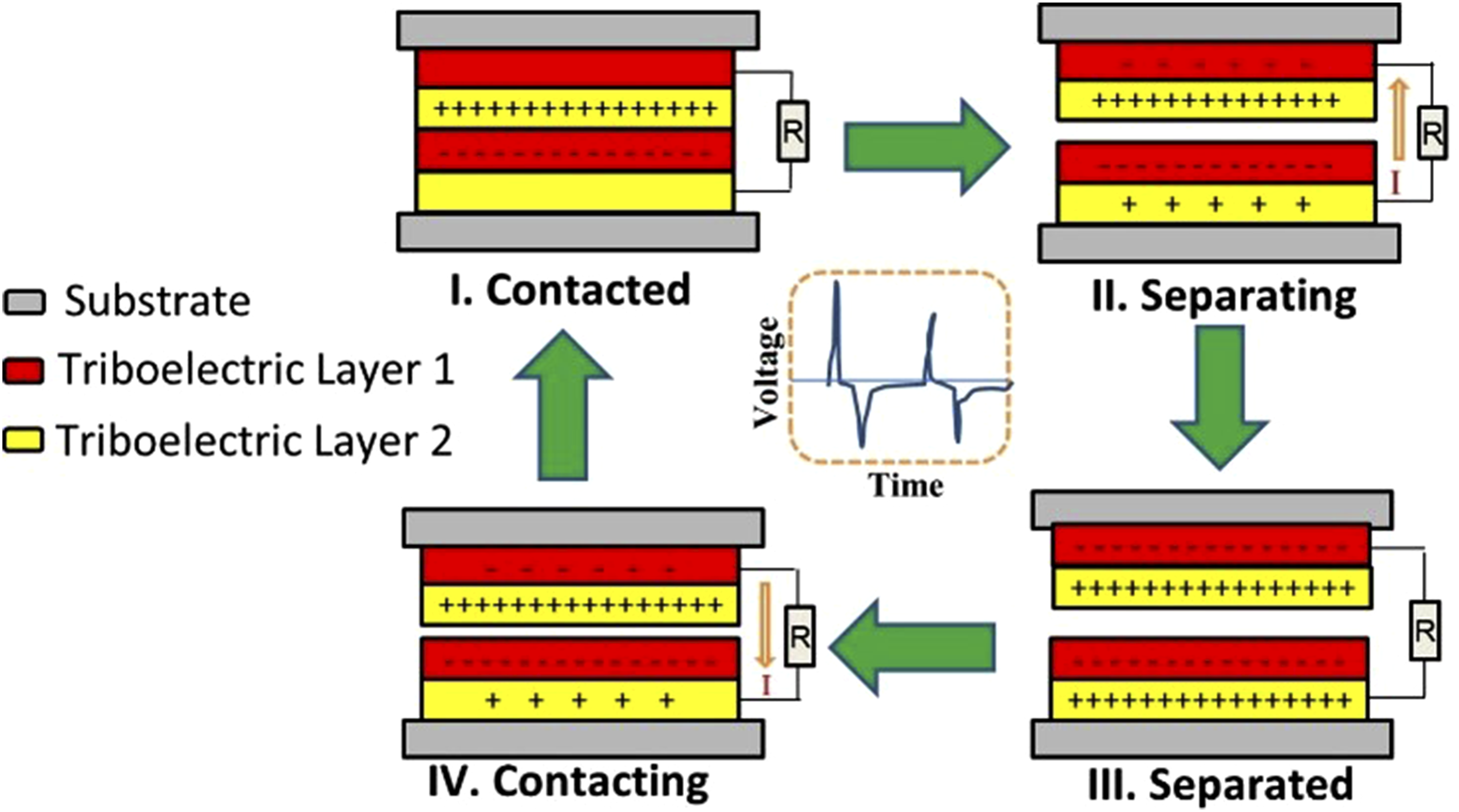
Singular value decomposition (SVD)
SVD is a numerical approach that decomposes a given matrix into three different matrices: an orthogonal matrix, a diagonal matrix, and the transpose of another orthogonal matrix V. Mathematically, SVD is expressed as:34–36

The singular values (SVs) are capable of capturing the most dominant signal patterns introduced by repetitive high frequency impulses that occur due to gear faults. The SV-features are insensitive to time shifts and can distinguish deterministic fault-related patterns from random noise. Thus, the SVs provide an effective way to characterise the signal behaviour under defective and non-defective situations.
Overview of the GCN
GCNs are a type of neural networks designed to classify graph structures. GCN uses the concept of convolution from typical CNNs to learn patterns in graphs and shows efficient performance in mining non-Euclidean data structures. Kipf and Welling
37
introduced a simplified, computationally efficient technique of spectral graph convolutions enabling learning of large-scale graphs. GCNs learn through node embeddings by performing convolutional operations over the whole graph topology. Node embeddings include both feature information and an account of interconnections between nodes. Let us consider the feature matrix of GCN as

Proposed methodology
Fabrication of TENG sensor
One of the key input of this study is to convert the mechanical vibrations of the gearbox into electrical energy using a contact-separation mode TENG. The gearbox vibration creates frequent contact and separation between the triboelectric surfaces and this repeated process generates prompt voltage signals that can be utilized to assess the gearbox condition. Figure 2 depicts the structure of TENG utilized in the current study. The TENG is built using a multilayered structure constituted by PTFE and Al films serving as electron-acceptor and electron-donor materials, respectively. On the top and bottom, first acrylic sheets (50 mm × 50 mm × 3 mm) are positioned that provide mechanical support and structural stability. On the upper acrylic sheet, a layer of Al film with 0.1 mm thickness is deposited followed by a layer of PTFE with 0.5 mm thickness. On the lower acrylic substrate, a layer of PTFE film is applied first followed by Al. The TENG is provided with two copper wire terminals that can be connected to a data acquisition (DAQ) system to measure the associated electrical voltage. Fabrication of TENG (a) Schematic diagram of TENG (b) Fabricated TENG.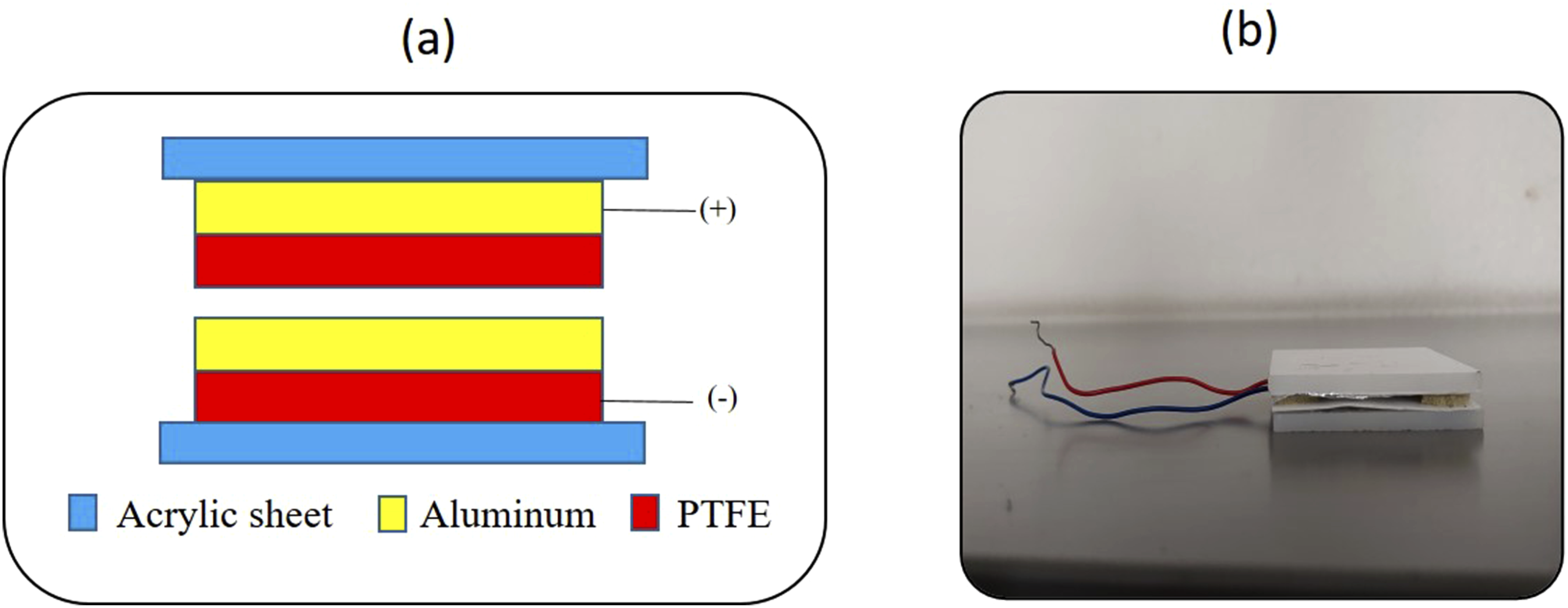
Proposed MPlex-TSVG
The proposed approach MPlex-TSVG is derived by a fusion of three concepts, namely, singular value feature extraction, multiplex graph theory and GCN. Figure 3 illustrates the construction of the proposed MPlex-TSVG using the TENG vibration signals. The suggested MPlex-TSVG can be obtained through the following steps: Step 1. The TENG-gear signals are divided into overlapping segments using a sliding window approach. Let the original signal be represented by x(j), j = 1, 2,…,N. Then, each window-segment of a signal can be denoted as s(f), f = 1,2,…,w where w is the total number of data points in each window. The total number of segments thus formed is given by: Step 2. Each segment of the original signal is reconstructed using the phase space reconstruction technique to form a new matrix whose elements can be created using the embedding dimension m and time-delay τ as follows:
39
Step 3. The SVD technique is applied to the matrix obtained above using the equation (1) to extract the SVs. Thus, for each signal, a series of SVs is obtained that are tuned to represent the fault evidences embedded in the associated temporal windows. The SVs for a given signal can be expressed as: Step 4. Each singular value sequence σ
l
(k) of order l can be treated as a separate layer and mapped to a graph denoted by G
l
= {V
l
, E
l
}, where V
l
and E
l
denote the set of vertices and edges at l
th
layer. To achieve this mapping, the horizontal visibility graph technique (HVG) is utilized. The HVG technique introduced by Lacasa et al.
40
specifies that two values in a time-series data are mutually visible if a horizontal line can be drawn from one value to another without intercepting any intermediate value. According to the HVG approach, two SV data points σ
l
(i) and σ
l
(j) at layer l are said to be horizontally visible if the following condition is satisfied: Step 5. After the intra-layer connections within the graphs {G
l
} have been obtained, the counterpart nodes of these graphs across different layers are connected to form inter-layer connections. Let us consider two distinct graphs G
α
∈{G
l
} and G
β
∈{G
l
} that are constructed from the SV sequences σ
α
and σ
β
at the layers α and β, respectively. Then, an inter-layer edge can be formed by linking two alike nodes V
α
(t) ∈ {G
α
} and V
β
(t) ∈{G
β
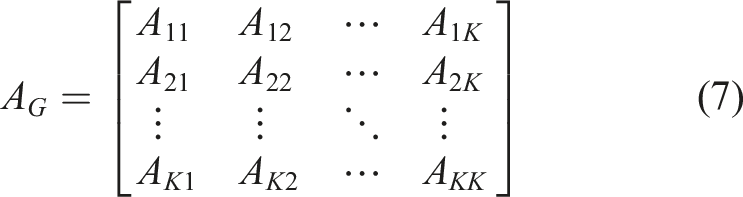
} where t indicates the equivalent node-positions in the respective graphs. Step 6. Finally, the MPlex-TSVG is constructed by assembling the intra-layer and inter-layer connections obtained in steps 4 and 5. The MPlex-TSVG can thus be represented by G = [V
G
, E
G
, K] where V
G
∈ {V
l
; l = 1, 2…, L} and E
G
∈ {E
l
; l = 1, 2…, L} denote the set of global nodes and edges in multiplex graph G and L indicates the total number of layers. Blueprint for the construction of MPlex-TSVG.
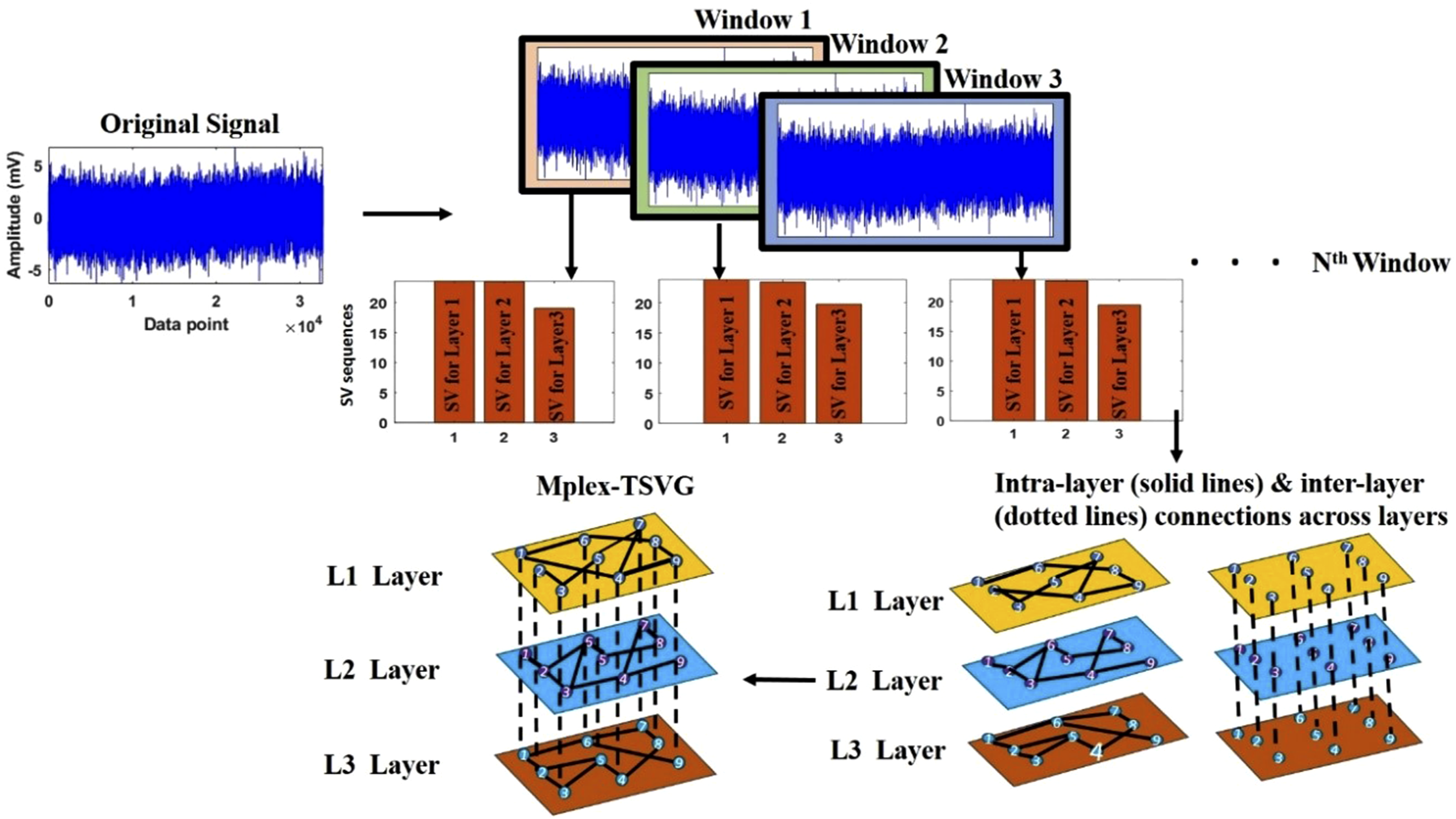
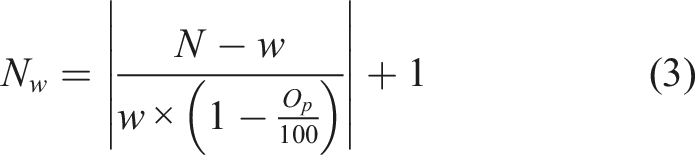



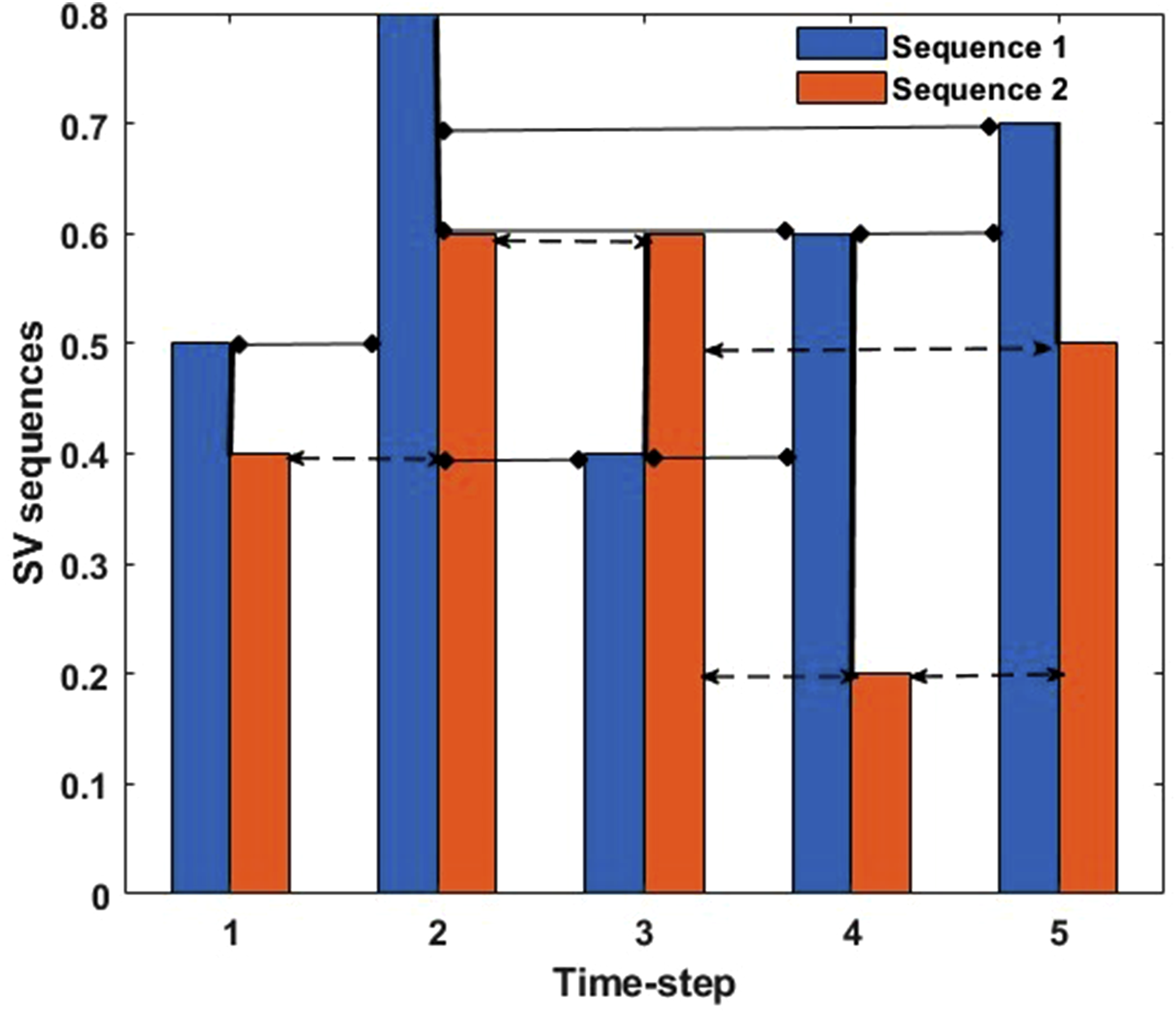
Figure 4 portrays the formation of intra-layer and inter-layer connections by picking two arbitrary SV sequences at layers l1 and l2. Let the two corresponding SV sequence data σ1 and σ2 be given by σ1 = [0.5, 0.8, 0.4. 0.6, 0.7] and σ2 = [0.4, 0.6, 0.6, 0.2, 0.5]. First, the intra-layer connection is inspected. Suppose two points σ
1
(2) = 0.8 and σ
1
(4) = 0.6 (indicated by the blue bars) are to be connected based on visibility rule given by equation (6). Their intermediate point becomes σ
1
(3) = 0.4. Since 0.4 < min (0.8, 0.6), the visibility condition is satisfied and the points σ
1
(2) = 0.8 and σ
1
(4) = 0.6 are connected to create an edge. This is shown in Figure 4 through black horizontal lines connecting the associated blue bars. Second, the inter-layer connection between σ1 and σ2 is established by building edges between their analogous nodes. Hence, σ1(1) = 0.5 is connected to σ2(1) = 0.4, σ1(2) = 0.8 is connected to σ2(2) = 0.6 and so on. Figure 4 shows the inter-layer connections by vertical black dashed-lines between the corresponding blue and orange bars. Step 7. The MPlex-TSVG consists of a sequence of graphs, with each graph having its own adjacency matrix populated with intra- and inter-layer connections. The adjacency matrix of the MPlex-TSVG is computed by concatenating the adjacency matrices belonging to the graphs at various layers as follows:
41
Formation of intra-layer and inter-layer connections in MPlex-TSVG.
Fault diagnosis via MPlex-TSVG and GCN
After having discussed the construction of MPlex-TSVGs, the steps implemented to diagnose the gear faults are summarized as follows: Step 1. The TENG sensor data for healthy and faulty conditions of each gear are acquired from the experimental setup. Step 2. The proposed MPlex-TSVG fault features are extracted from the raw TENG signals using the procedure discussed above. The SVs forming the corresponding MPlex-TSVG are treated as the node features. Step 3. The whole MPlex-TSVGs data is divided suitably into training and test data. Step 4. The GCN is trained with the training data and the trained model with a tuned structure is kept aside for testing purpose. Step 5. The trained GCN model is utilized to diagnose or classify the test data that is unknown to it. Step 6. The classification accuracies are computed to verify the model’s efficiency. The classification accuracy is given by number of correctly classified samples divided by the total number of samples.
The comprehensive layout of the proposed gear fault diagnosis technique using MPlex TSVG and GCN is summarized in Figure 5. Layout of the proposed methodology for gear-fault diagnosis.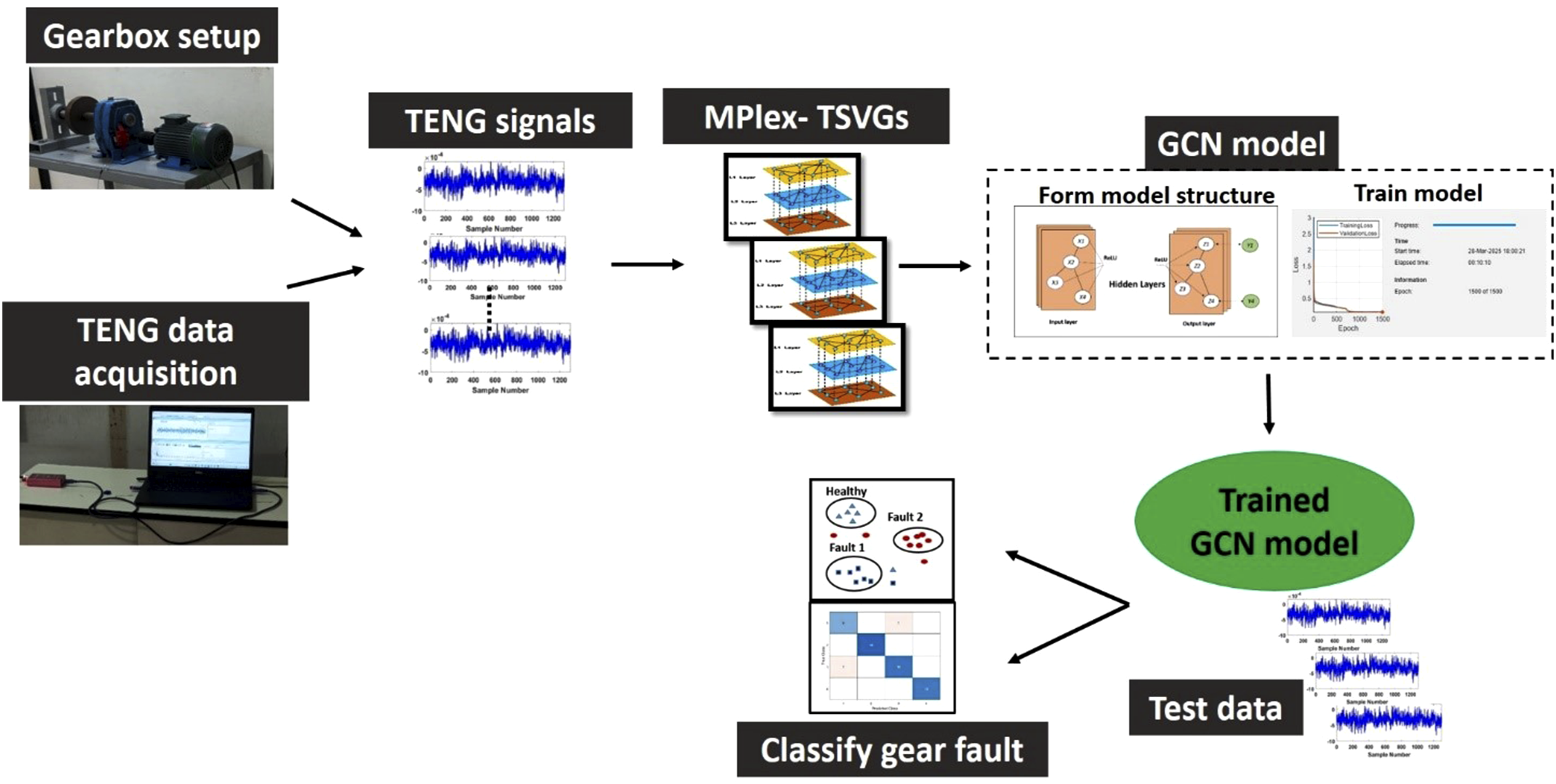
Experimental setup
Experimental setup – I (ES-I)
Figure 6 shows the ES-I established at Ahmedabad University’s Mechanical Design Laboratory to collect the gear vibration signals. The setup consists of a 3-HP induction motor that drives the gearbox through a spider coupling. The gear ratio is approximately 5:1. The number of teeth in pinion and gear are 20 and 101 respectively. The output shaft of the gear supports a load of 10 kg. A variable-frequency drive (VFD) is used to control the speed of motor. The vibration data for different gear conditions are acquired by mounting TENG sensor on the gearbox. A data-acquisition system (DAQ) of make TIERA-Phonovibe is used to gather the data. ES-I developed for assessing gear condition data.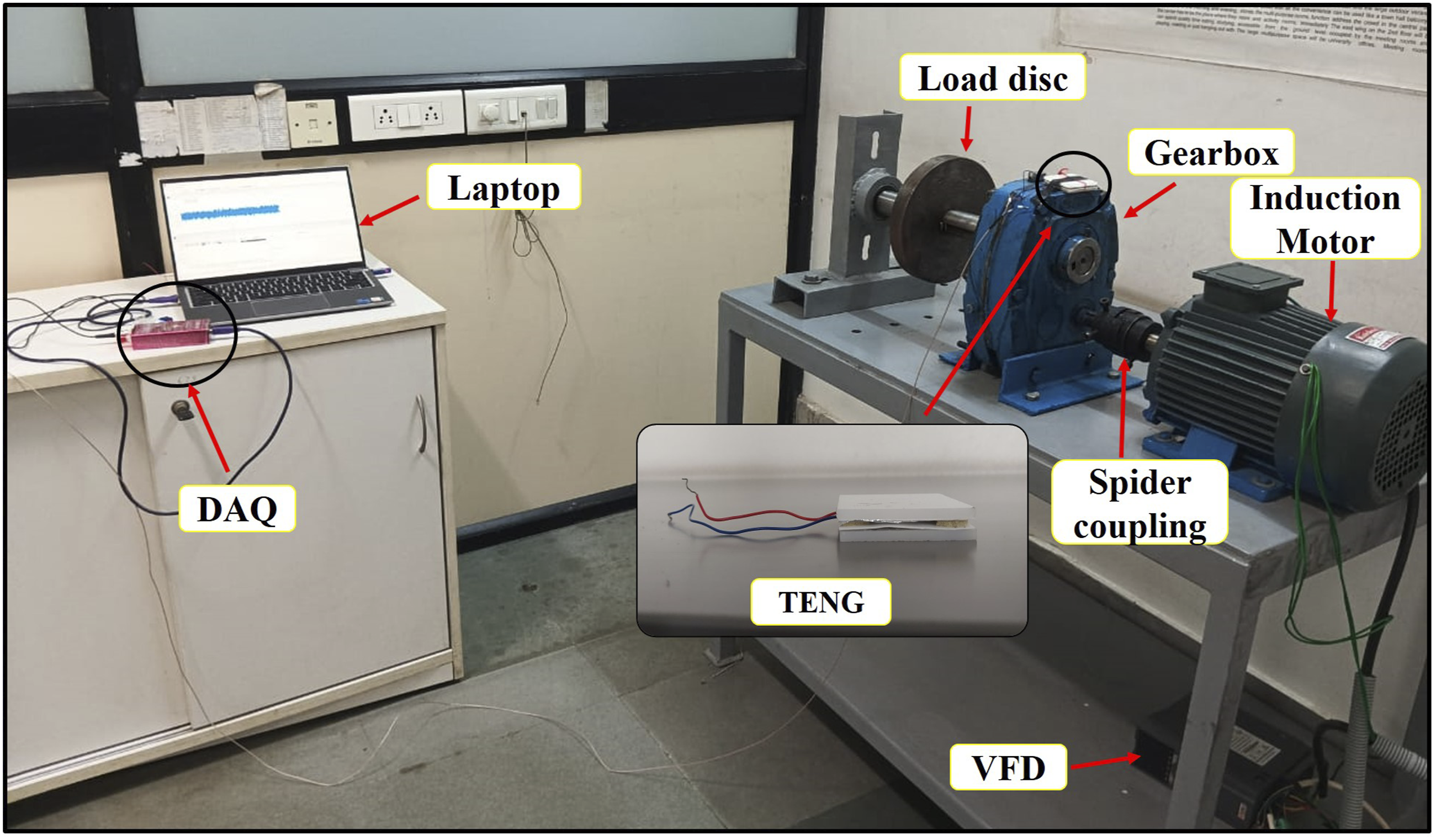
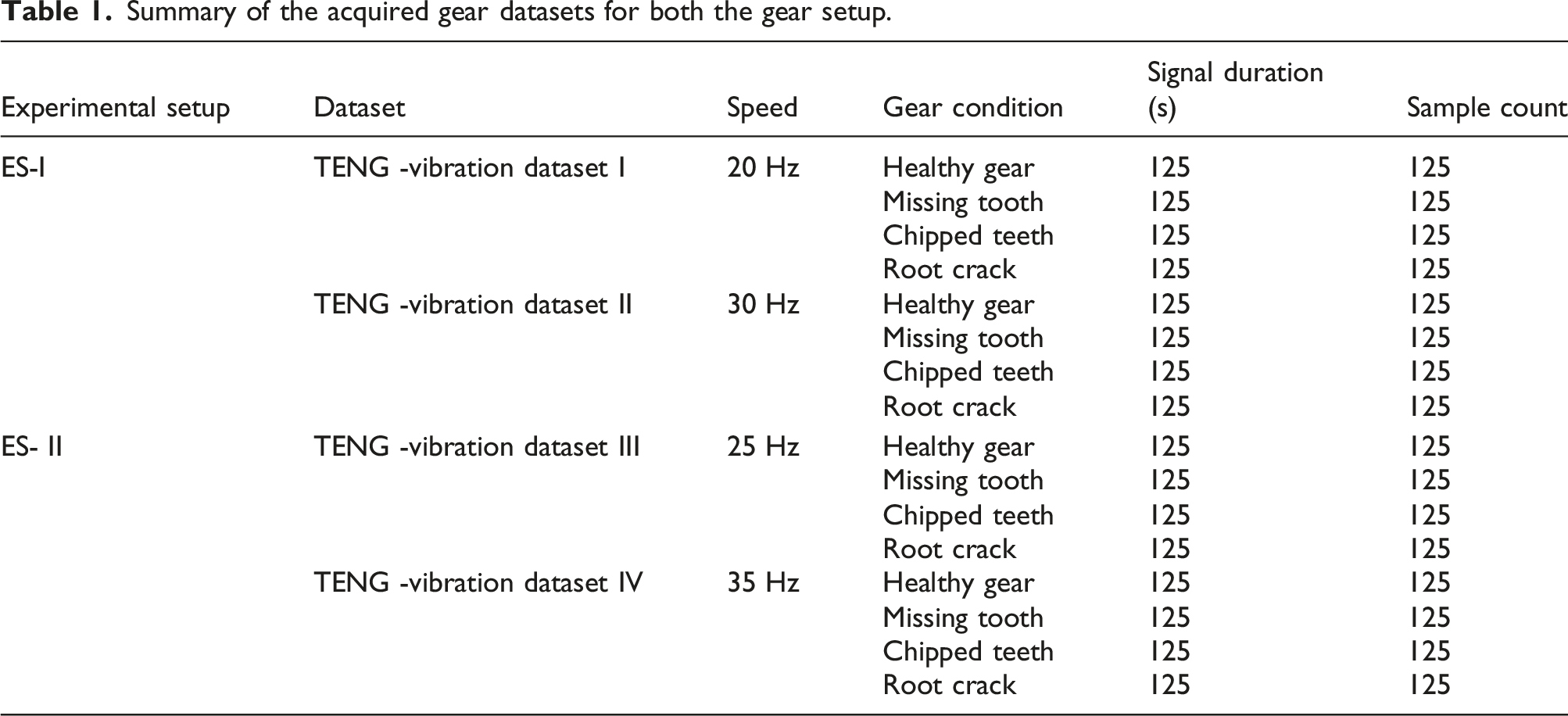
The experiments are executed under two different speeds: 1200 RPM (20 Hz) and 1800 (30 Hz) separately. The TENG data are collected under four different gear conditions: healthy gear, missing tooth, chipped teeth and root crack. Figure 7 shows the different types of faults induced in the gears by grinding. The sampling frequency and sampling length are set to 32.76 kHz and 32768 data points, respectively. The acquisition duration is 125 s. Thus, a total of 125 TENG-signals from each gear condition are available for analysis. The details of the acquired dataset are summarized in Table 1. Gear heath states displaying healthy and faulty conditions. Summary of the acquired gear datasets for both the gear setup.
Experimental setup - II (ES-II)
The ES-II consists of a 3-phase 3 HP induction motor driving a gearbox as shown in Figure 8. The speed of the gearbox is regulated by a controller attached to motor. The load on the gearbox is varied by a magnetic brake connected to its output shaft. A brake controller is provided to alter the resistance of the magnetic brake. The gearbox is a two stage parallel gearbox with 2.5 maximum gear ratio per stage. To acquire vibration data, the TENG sensor is mounted in an axial direction of the gearbox and the associated data are collected via a National Instruments-make DAQ (NI-4431). Gear conditions identical to those of ES-I i.e., healthy, missing tooth, chipped tooth & root crack, are tested. The sampling frequency and the sampling length are set to 100 kHz and 32768, respectively. The experiments are conducted under two different speed conditions 1500 RPM (25 Hz) and 2100 RPM (35 Hz). Table- 1 summarizes the TENG data gathered from the ES-II. ES-II for acquiring gear vibration data.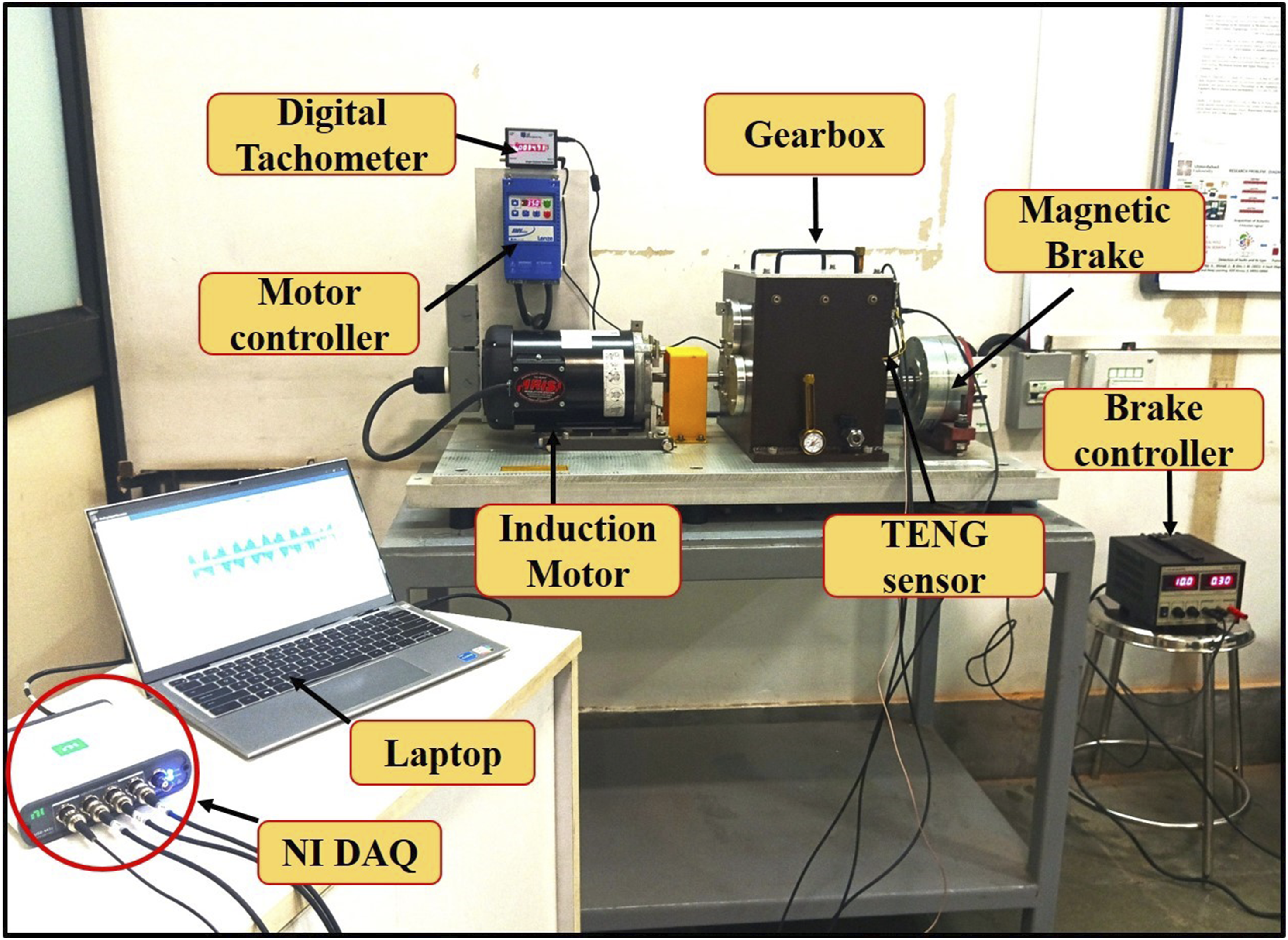
Experimental results and insights
Classification results with fixed settings for m, τ and w
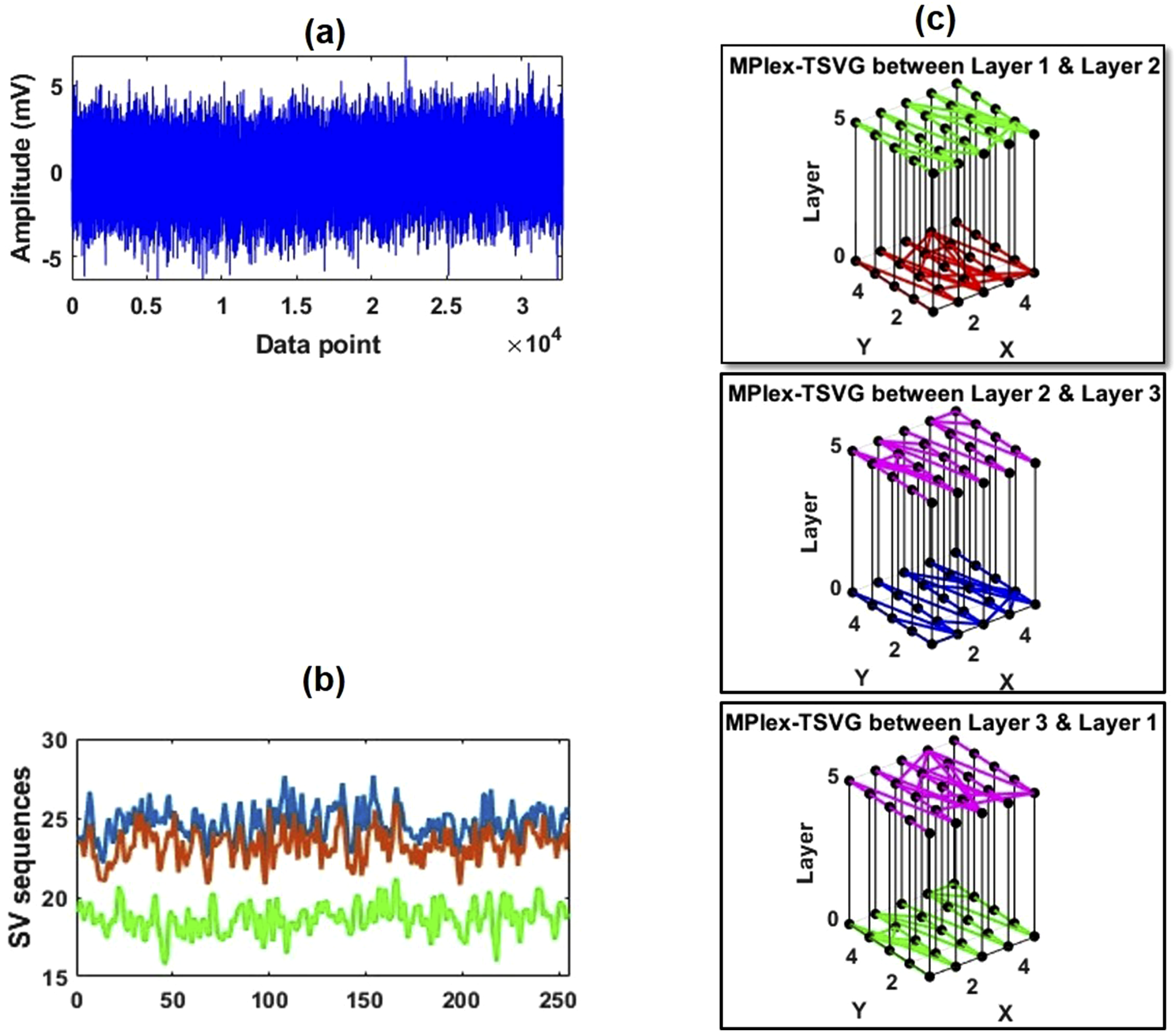
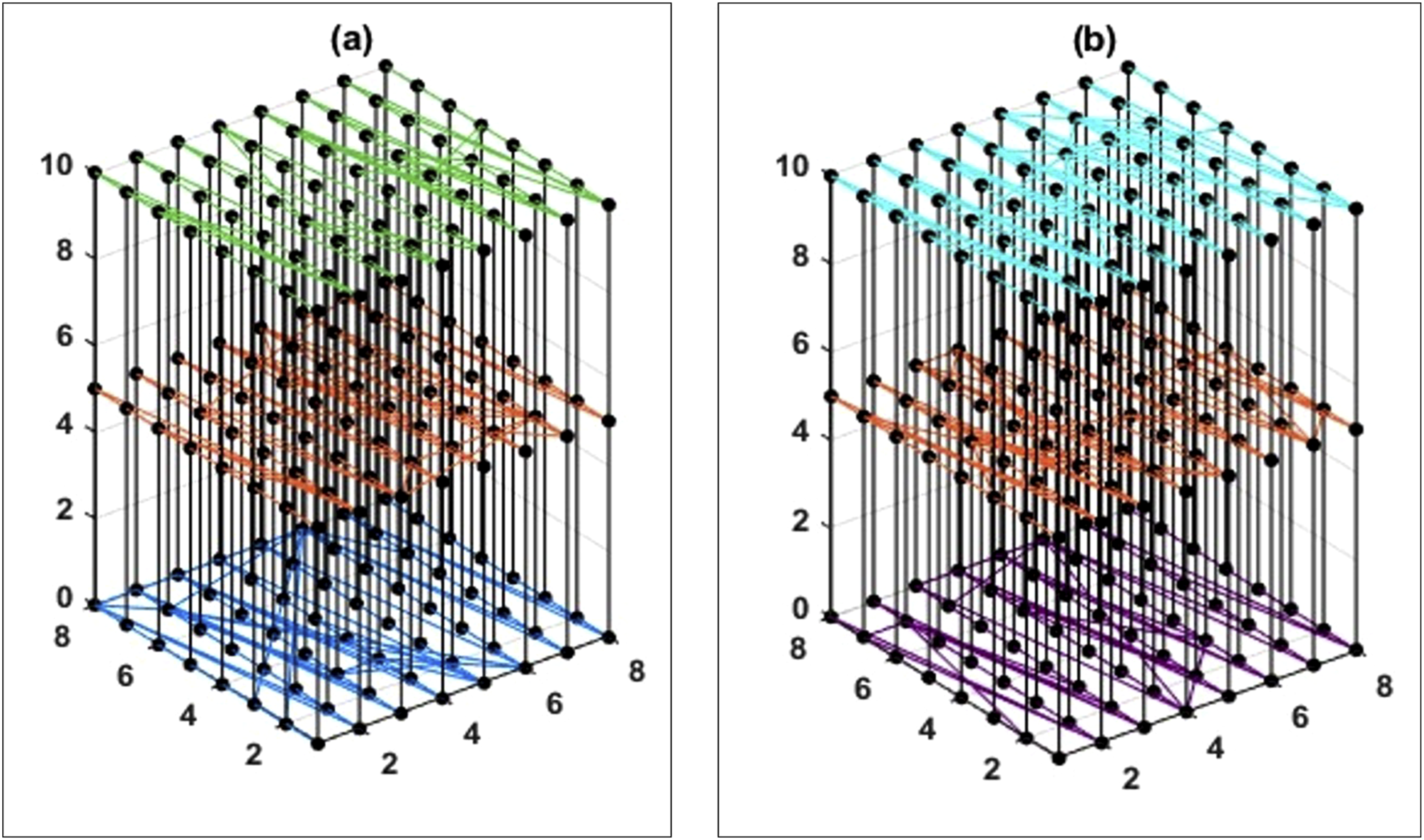
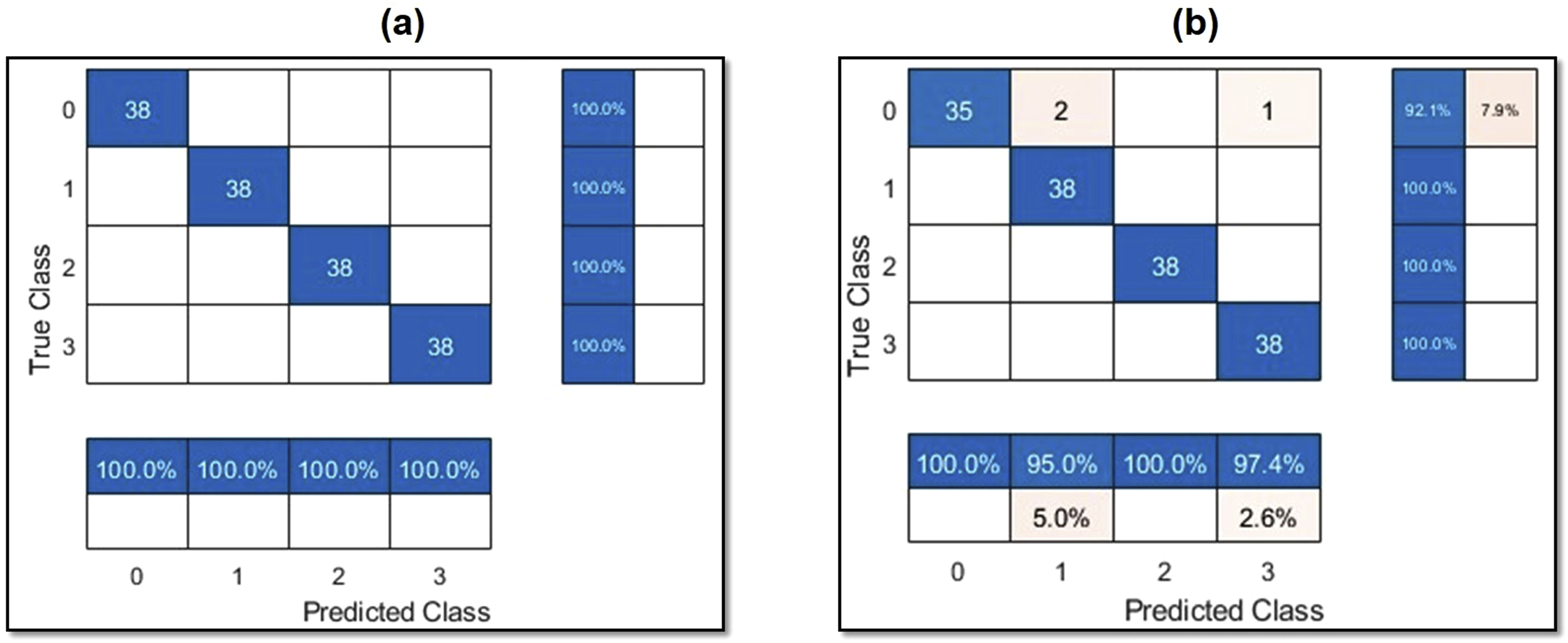
The proposed approach is implemented using the TENG data described in experimental setup. First, the TENG data acquired from ES-I is analyzed. Initially, the TENG signals acquired under 20 Hz operating condition are considered. Figure 9 shows the TENG signal samples belonging to the different gear health states. Figure 10 shows the formation of the MPlex-TSVG for an arbitrary signal sample. Figure 11 portrays the MPlex-TSVGs extracted from healthy and faulty TENG signals. The following settings are used to produce the MPlex-TSVG: w = 256, O = 50%, embedding dimension m = 3 and time delay τ = 1. The GCN architecture for training contains the following layers in a sequential manner: an input node-vector layer, two consecutive convolutional layers with each layer trailed by a normalization and a ReLU operation, a global average-pooling layer and a dense layer. The convolutional layers comprise of 64 units. For training the GCN model, the MPlex –TSVG data associated with each gear condition are partitioned into 50:20:30 ratio to form the training, validation and test sets. Consequently, from each gear health state, the training data is constituted using the initial 60 samples, validation data is composed via next 30 samples, and the remaining 35 samples are reserved for testing. Thus, the total samples accessible for training (including validation) and testing are 360 and 140 respectively. The training epochs and the learning rate are taken as 200 and 0.01, respectively. The gear faults are assigned class labels as {‘healthy’, ‘missing tooth’, ‘chipped teeth’, and ‘root crack’}. Similar steps are repeated for the 30 Hz operating condition. Table 2 shows the corresponding results which clearly indicates that the proposed methodology provided higher classification accuracies of 100% and 98.68%, respectively, under both the speed conditions. Figure 12 also shows the confusion matrices, indicating the percentage of true positives and true negatives, against the false positives and false negatives. Figure 12 clearly indicates that the proposed technique is highly effective in separating the class labels belonging to different gear conditions with negligible misclassification rates. Original TENG signals under different gear conditions. Construction of MPlex-TSVG (a) Raw TENG signal segmentation (b) Singular values from reconstructed signals (c) MPlex-TSVG between different layers. MPlex-TSVG for different gear conditions (a) Healthy condition (b) Faulty condition. Experimental results for the both experimental setups. Confusion matrices (a) 20 Hz speed condition (b) 30 Hz speed condition.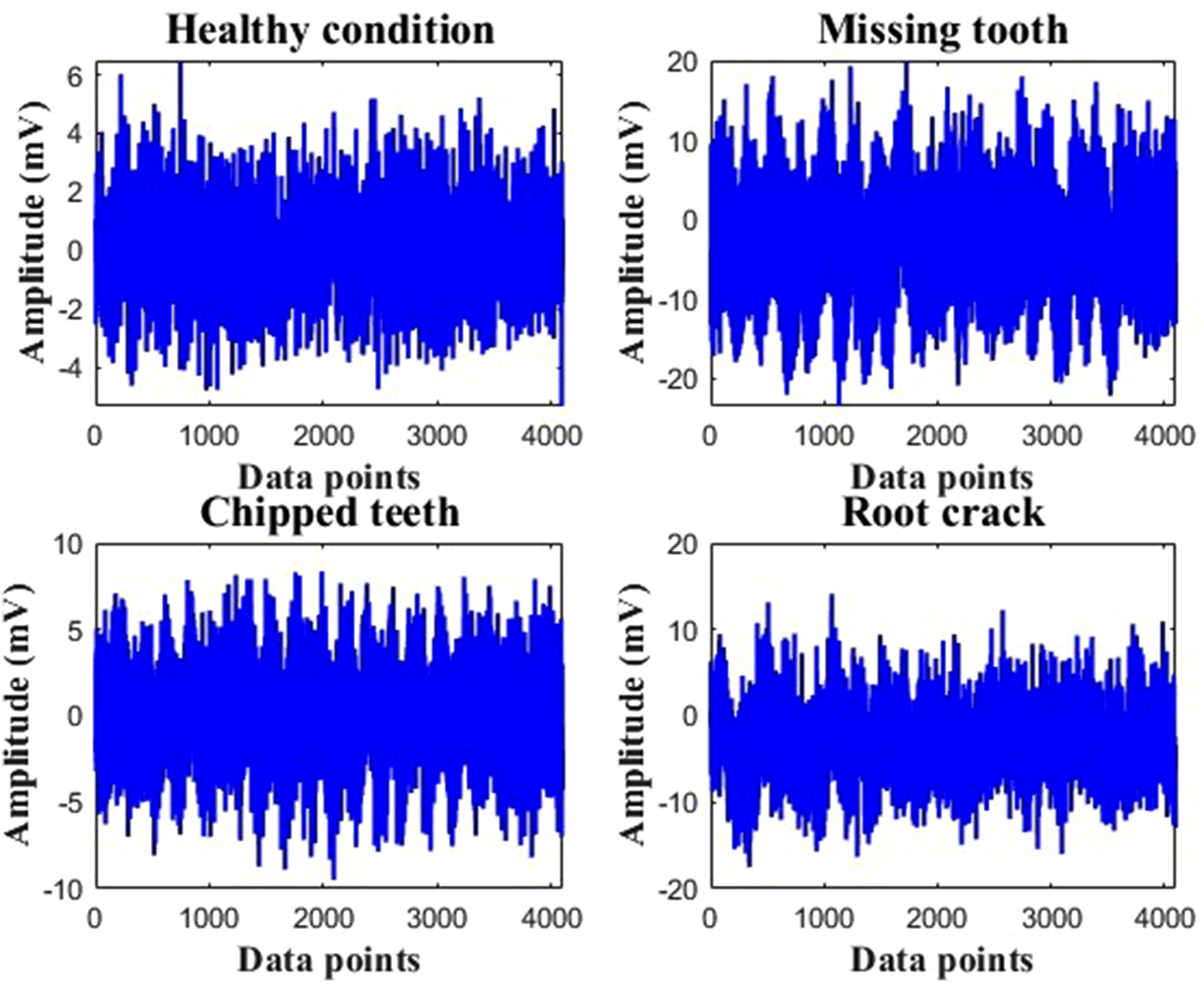

For ES-II, the TENG signals are acquired under two different speed conditions 25 Hz and 35 Hz, respectively. The MPlex-TSVGs are extracted from the TENG signals in a similar manner as discussed above. The GCN structure and training settings remain unchanged. The training to test data ratio is taken as 70:30. The corresponding results are presented in the Table 2 itself. It is found that the suggested approach attains higher classification accuracies of 100% and 99%, respectively, under the 25 Hz and 35 Hz speed conditions. From the Table 2, it is also realized that when the gearbox operates at higher speeds, the classification accuracy is reduced by a small margin of approximately 1%. The reason behind is, at the higher speed conditions (i.e. 30 Hz and 35 Hz), the vibration signals produces more complex patterns due to enhanced noise levels and external disturbances. However, the proposed method is capable enough of handling the signal noise and works efficiently under varying operating conditions.
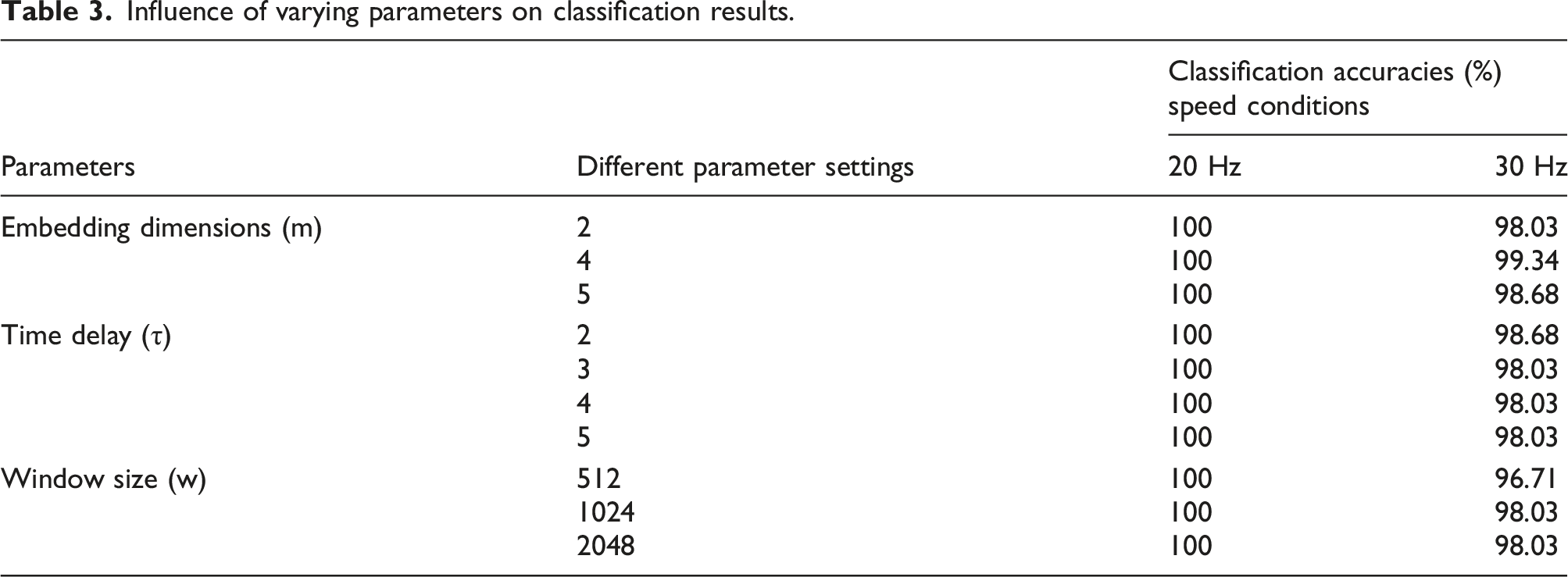
Classification results with variation in MPlex-TSVG parameters - m, τ and w
Influence of varying parameters on classification results.
Classification results with variation in training data size
Classification accuracies with variation in training-to-test data ratios.

Comparisons
Comparison results.

Another comparison is performed with a combination of Hilbert-Huang transform (HHT) and CNN. In this case, HHT-TF is obtained by applying variational mode decomposition (VMD) on the TENG signals. The CNN model is taken identical as mentioned above. This comparing method achieved accuracies of 92.57% and 93.24%, respectively. Thus, the proposed MPlex-TSVG + GCN technique provided equivalent results as compared to the CWT + CNN technique for the 20 Hz condition and improved the accuracy by 8.14% for the 30 Hz condition. On the other hand, the classification accuracies improved by 7.43% and 5.44%, respectively when compared to the HHT + CNN technique.
Conclusion
This paper proposed a novel fault diagnosis technique to classify various gear fault conditions. First, the data for different gear conditions are acquired using a vibration sensor fabricated from TENGs. Subsequently a new technique called as MPlex-TSVG is proposed to extract the fault information contained in the TENG signals. The MPlex-TSVG uses a network of graphs formed by multiple layers of singular values derive from PSR-SVD, each encoded with desired time- and frequency attributes. The MPlex-TSVGs are then supplied to GCN for training and testing the unknown gear health states. The suggested approach is validated through gear dataset obtained through two separate experimental setups with various speed conditions (i.e., 20 Hz, 30 Hz for ES-I and 25 Hz and 35 Hz for ES-II) and with varying gear health states (healthy, missing tooth, chipped teeth, root crack). The proposed technique delivered higher diagnosis accuracies for both the experimental setups. For ES-I, the accuracies of 100.00% and 98.68% are achieved under the two operating conditions 20 Hz and 30 Hz, respectively. For ES-II, the accuracies of 100.00% and 99% are achieved under the two working conditions, 25 Hz and 35 Hz, respectively. In addition, the proposed MPlex-TSVG + GCN technique outperformed the commonly used techniques based on time-frequency distribution images obtained by wavelet transform and HHT techniques. Future work will be focused towards the application of different materials or methods in building the TENG with an aim to enhance the fault diagnosis performance.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research has been supported by the Ahmedabad University seed grant with no. “URBSEASI23A1”.