
Abstract
This paper investigates the control problem of liquid slosh suppression in overhead crane systems. In industrial applications, the liquid sloshing crane system (LSCS) transfers liquid within a container in a short time with minimal oscillation to ensure process efficiency and safety under model parameter uncertainties and unmeasurable state variables. To address these challenges, an adaptive interval type-2 fuzzy control with descriptor-based observer scheme (AIT2FC-DO) is proposed. The adaptive interval type-2 fuzzy control (AIT2FC) employs a composite sliding surface that couples actuated and unactuated states, combined with a fuzzy approximator to estimate uncertainties based on Interval Type-2 Fuzzy systems using the Nie–Tan type-reduction method to reduce computational complexity, thereby generating the control signal through adaptive update laws, while all state variables required by the AIT2FC are estimated using a descriptor-based observer (DO) constructed from a partially linearized Takagi–Sugeno descriptor model. The stability of the AIT2FC is first established, followed by the convergence of the estimation error of the DO, and finally the stability of the overall AIT2FC-DO system is proven. The ME, RMS, ITAE, and settling time indices are also provided to quantitatively evaluate the controller performance. Compared with input shaping, the proposed closed-loop control scheme demonstrates improved effectiveness and robustness for the LSCS by reducing the liquid elevation during position tracking by approximately 5 mm.
Keywords
1. Introduction
The demand for liquid transportation using overhead crane systems has been steadily increasing in harsh industrial environments, where high precision is required to prevent excessive sloshing and vibrations. As a typical underactuated system with strong nonlinearities and parameter uncertainties, it poses a significant control challenge. In practice, two main objectives must be achieved simultaneously: the payload should be transferred to the target position as quickly as possible to improve productivity, while the liquid sloshing must be minimized to meet technological requirements.
Due to the significant difficulty in measuring certain system states during liquid transportation (Ibrahim, 2005) the implementation of feedback control architectures becomes challenging. As a result, input shaping (Alshaya and Alghanim, 2020) and feedforward methods are more commonly employed. For instance, in a typical industrial casting process, heavy liquid metal must be transported by overhead cranes, which is considered highly hazardous due to high temperature, humidity, and dust conditions (Terashima and Yano, 2001). In such scenarios, vibration suppression through controller design is essential to ensure human safety against the risks associated with sloshing of hot liquid metal. Furthermore, the use of liquid level sensors inside the container is practically infeasible.
Therefore, various input-shaping-based control schemes have been proposed for liquid sloshing crane systems (LSCS) without requiring feedback sensors. The optimal design of the shape and size of a rod container device, where the sloshing dynamics in each transfer direction are represented by a double pendulum model, is presented in Kaneshige et al. (2008). Optimal Command Shaping employing a cost-effective and smooth continuous command shaper based on a multisine-wave function with independent time parameters is introduced to suppress sloshing vibrations (Khorshid and Al-Fadhli, 2021). Additionally, a smooth polynomial-shaped command with adjustable duration is developed to eliminate residual vibrations in a multi-mode liquid-filled container transported while preserving robustness against parameter uncertainties (Alshaya and Almujarrab, 2021). A feedforward controller incorporating notch filter terms is utilized to suppress the sway of the payload in an autonomous mobile overhead crane system (Kaneshige et al., 2009). In Li et al. (2022), three optimal trajectory planning strategies based on quasi-convex optimization, namely minimum-time trajectory planning (MTTP), minimum-energy trajectory planning (METP), and time-energy optimal trajectory planning (TEOTP), are proposed to simultaneously suppress container swing and liquid sloshing. However, input-shaping methods inherently exhibit limited disturbance rejection capability in industrial environments, while feedforward approaches remain highly sensitive to parameter uncertainties.
Meanwhile, feedback control approaches based on closed-loop systems, which provide strong disturbance rejection and reduced sensitivity to parameter variations, have also been applied to slosh suppression for this class of systems. Conventional methods such as proportional–integral–derivative (PID) control have been employed to regulate lateral sloshing represented by a simple pendulum model Bandyopadhyay et al. (2009), while a data-driven PID tuning approach based on safe experimentation dynamics (SED) has been proposed for liquid sloshing control (Shukor et al., 2017). In addition, advanced control techniques such as H-infinity synthesis with pole clustering based on LMI region schemes have also been investigated for liquid slosh control (Tumari et al., 2019). Indeed, the H-infinity controller is highly promising, as it can be utilized for anti-disturbance control of Markov jump systems with mismatched disturbances, thereby ensuring closed-loop stability with the desired H-infinity performance (Shen et al., 2021). Robust control of container–sloshing coupled dynamical systems has been achieved through the synthesis of the variable gain super-twisting algorithm (VGSTA) (Mishra and Kurode, 2014). Additionally, a fuzzy sloshing controller has also been proposed for industrial liquid transport tasks requiring high-precision motion performance (Hussien et al., 2025). However, these aforementioned approaches generally require multiple state variables to be measured and utilized in the feedback control scheme.
Over the past decades, fuzzy logic systems have been widely applied for various purposes, including universal approximation of nonlinear and uncertain components in models, such as linear and multi-linear functions (Zeng and Singh, 1996); direct regulation of nonlinear systems through inference mechanisms based on human reasoning (Nguyen et al., 2025); online adaptation of controller parameters for PID or sliding mode controllers (Yesil et al., 2003); estimation of unmeasurable or unknown state variables (Dong et al., 2026); proactive compensation of unknown nonlinear behaviors to handle sensor and actuator attacks while ensuring stable consensus among agents (Khan et al., 2025); and mitigation of errors caused by friction or dead-zone nonlinearities (Jang, 2001).
Fuzzy systems are generally classified into three main categories: Mamdani-like systems, Takagi–Sugeno (T-S) fuzzy systems, and Mamdani fuzzy systems. First, T-S fuzzy systems, also referred to as TSK systems, are considered model-based approaches because they employ mathematical functions in the consequent part, enabling accurate representation of local system dynamics through the combination of linear time-invariant subsystems (Precup et al., 2024). Furthermore, T-S models can be integrated with advanced methods such as guaranteed-cost event-triggered anti-disturbance control for wind turbines (Gu et al., 2024) and fault detection (FD) for discrete-time T-S fuzzy systems via iterative interval estimation (Shen et al., 2023b). Second, Mamdani-like fuzzy systems have recently attracted increasing attention because they combine the interpretability of Mamdani systems with modern optimization and computational capabilities to effectively handle highly nonlinear systems with significant uncertainties (Nguyen et al., 2019). Third, interval type-2 Mamdani fuzzy systems directly regulate nonlinear systems based on human reasoning through inference mechanisms (Nguyen et al., 2025) and control underactuated mobile two-wheeled inverted pendulums (MTWIPs) subject to modeling uncertainties and external disturbances (Huang et al., 2018). Therefore, the application of fuzzy systems to controller and observer design for liquid sloshing crane systems (LSCS) is well justified, as it enables suppression of undesirable effects while facilitating state estimation from readily measurable variables.
Furthermore, the LSCS is a nonlinear underactuated system; therefore, many existing studies on nonlinear and underactuated systems can be extended to this class of systems. Notably, Ye (2018) employed saturated controllers to stabilize uncertain feedforward strongly nonlinear underactuated systems while guaranteeing asymptotic stability of the corresponding reduced system. In addition, networked nonlinear systems have been controlled using a data-driven approach with event-triggered output mechanisms to ensure uniform ultimate boundedness of the tracking error system (Shen et al., 2023a). Moreover, an extended Kalman filtering-based nonlinear model predictive control method has been developed for underactuated systems (Zhai et al., 2024). With the increasing demand for high-performance control of underactuated systems, fuzzy systems have been widely applied in both theoretical studies and practical applications (Huang et al., 2019).
Following the aforementioned motivations and limitations of existing methodologies for LSCS, this study focuses on the design of an adaptive interval type-2 fuzzy control integrated with a descriptor-based observer (AIT2FC-DO) for the underactuated LSCS. The adaptive interval type-2 fuzzy control (AIT2FC), employing Interval Type-2 fuzzy basis functions, acts as an approximator for uncertain components, while leveraging the advantages of a composite sliding surface that incorporates both actuated and unactuated states to enhance position tracking performance in the initial phase and prioritize liquid sloshing suppression in the final phase. The Descriptor-based Observer is designed to estimate the angular states of the underactuated system using only a minimal set of measurable variables, namely position and velocity, which are readily available in industrial environments. The estimation error is ensured to converge rapidly to zero, thereby guaranteeing the stability of the overall closed-loop system when integrated with the AIT2FC.
The main contributions of this study are summarized as follows: • The proposed AIT2FC-DO methodology is capable of achieving stable control and suppressing liquid sloshing within a short time, while maintaining robustness against uncertainties in model parameters. • The Descriptor-based Observer, constructed from a partially linearized Takagi–Sugeno descriptor model, is capable of estimating the full states of the LSCS, making it suitable for industrial environments where certain variables are not directly measurable. • The stability of the AIT2FC is proven, the estimation state errors are shown to converge to zero, and the stability of the overall system under the integrated AIT2FC-DO framework is established.
2. System model
This section describes the dynamic equations of the liquid sloshing crane system (LSCS) based on the Lagrangian modeling technique to design a closed-loop control for suppressing liquid vibration in the container of the overhead crane, as shown in Figure 1. These equations are developed under the assumptions that the flow is time-invariant, no slipping of the trolley occurs, the displacement and velocity of the liquid surface are infinitesimal, and the container is a rigid, impermeable body. As established in Kaneshige et al. (2008), the LSCS model for three-dimensional transfer is adapted for two-dimensional transfer in the Oxy plane. The position of the entire LSCS is determined by the trolley, which is driven by force u1 (N) along the x-axis, with a swing angle θ1 (rad) oscillating from an equilibrium. The rigid rectangular container of size l × w (m) is filled with liquid to a level of h (m). The liquid sloshing crane system.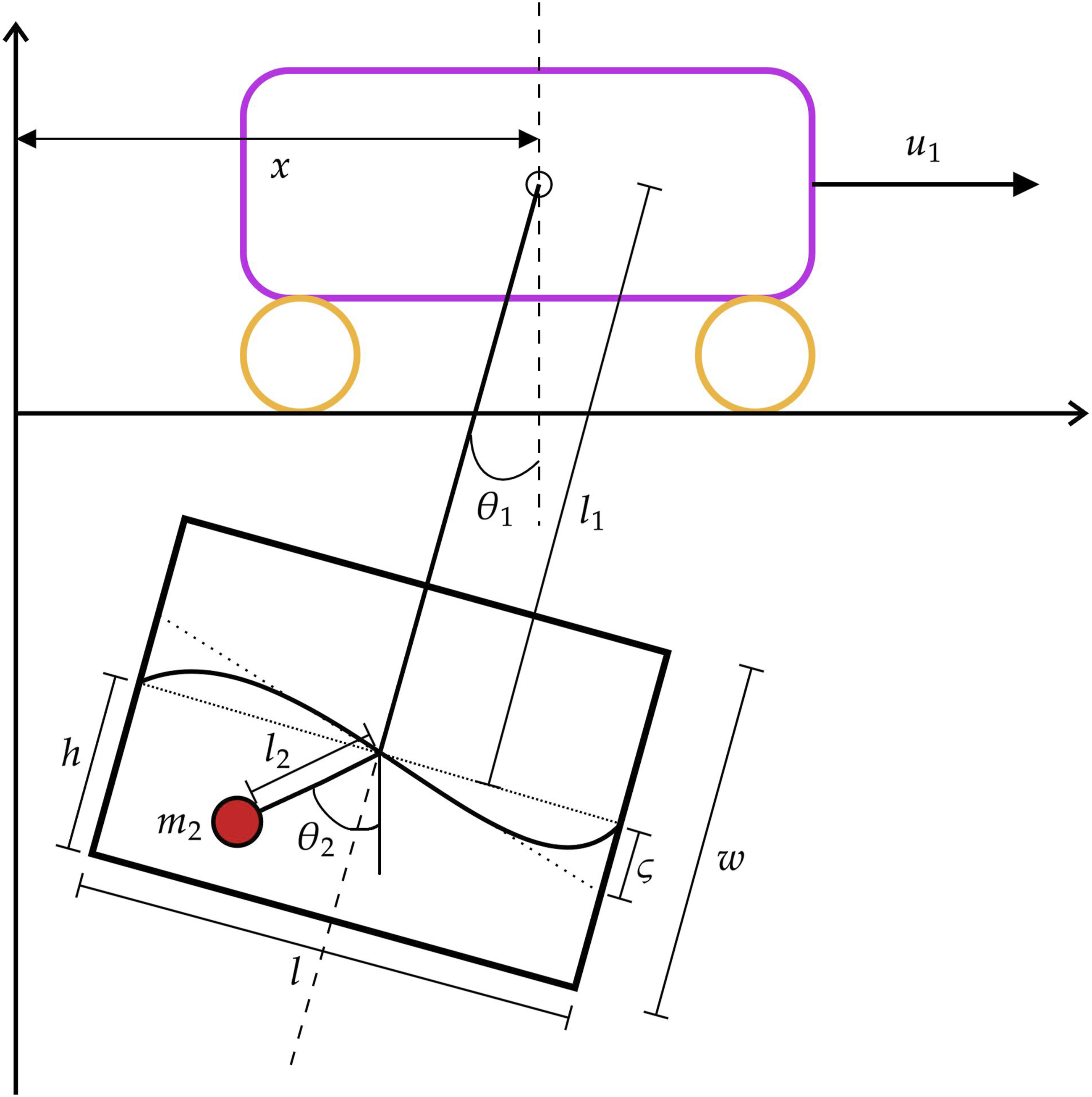
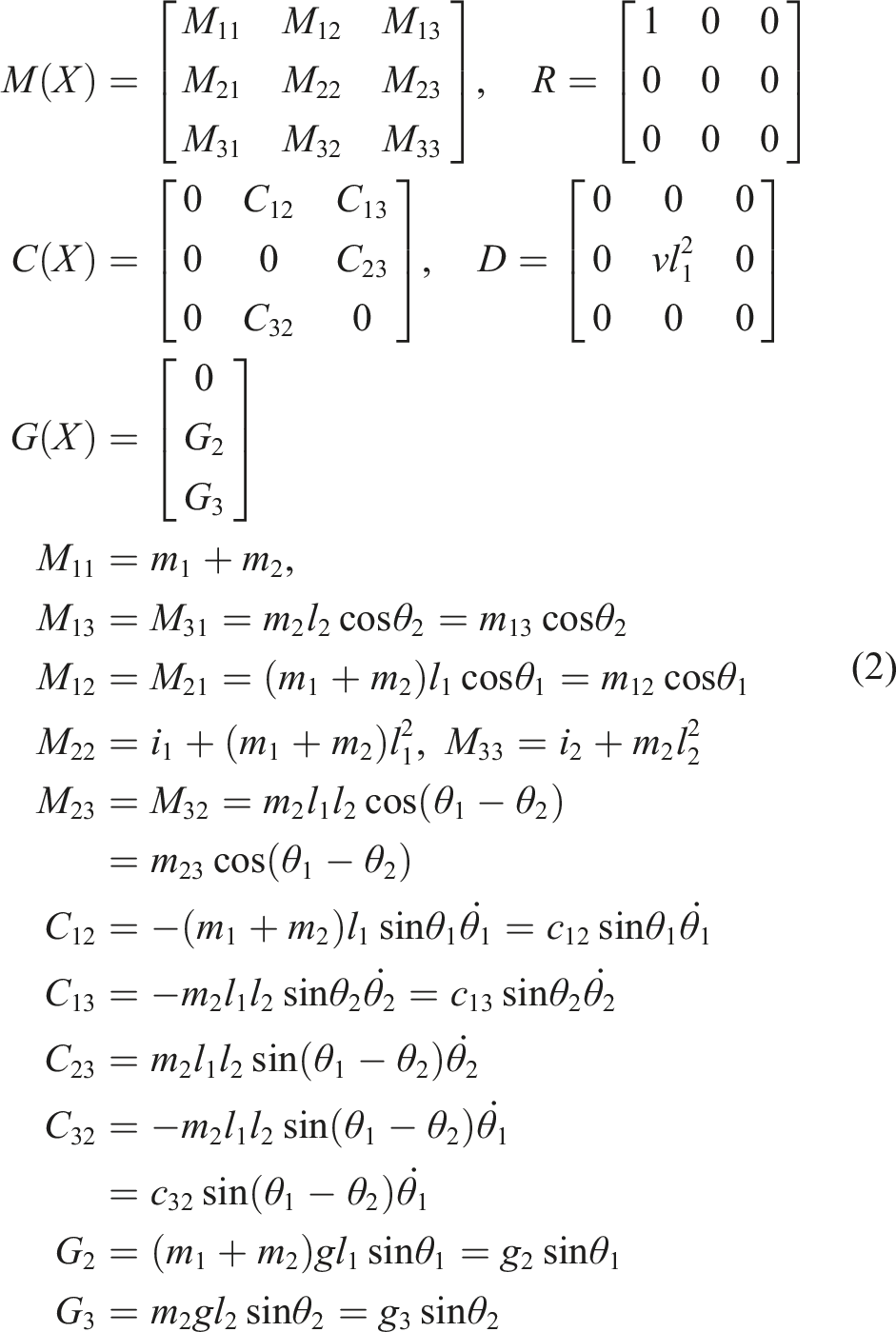
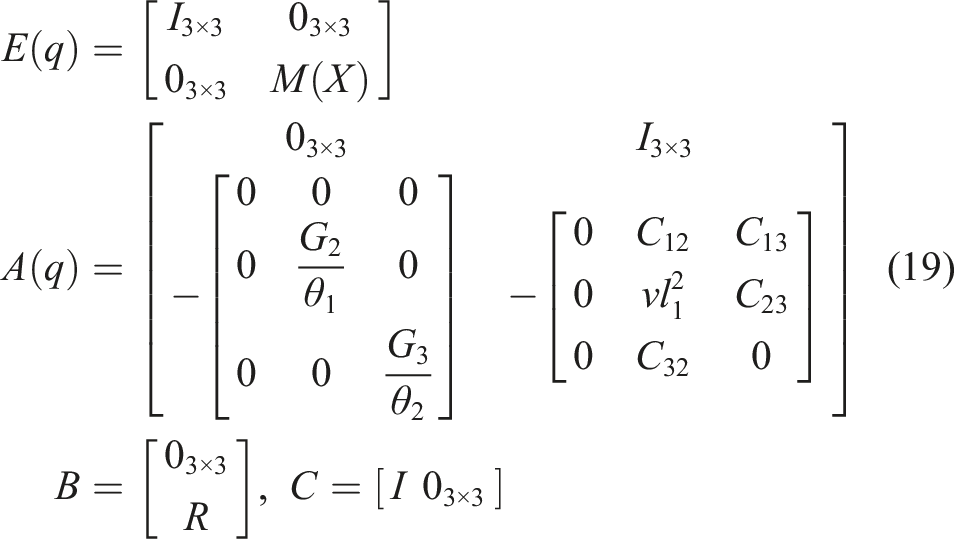
As reported in Qi et al. (2023), higher sloshing dynamics may become relevant under broader or more aggressive operating conditions, for which a multi-degree-of-freedom pendulum model can provide improved representation. In this study, the container is operated under moderate and smooth acceleration; therefore, the influence of higher sloshing modes is assumed to be negligible. Consequently, the rod–container assembly is represented by the first pendulum, while the liquid vibration corresponds to the second. The nonlinear equations of the LSCS are subsequently derived into compact matrix-vector form using the Lagrangian mechanics framework as follows:

The surface elevation of the liquid at the container’s edge, as shown in Figure 1, is calculated based on the swing angle of the sloshing model θ2 and is formulated as follows:

3. Control methodology
As previously mentioned, the LSCS is an underactuated system characterized by strong nonlinearities and uncertainties. Additionally, the difficulty in measuring specific state variables using sensors poses a significant obstacle to conventional closed-loop feedback methods.
To overcome these challenges, an AIT2FC-DO scheme is proposed as illustrated in Figure 2, which integrates an adaptive interval type-2 fuzzy controller (AIT2FC) with a descriptor-based observer (DO) to achieve high-precision control performance. Within this framework, the AIT2FC employs a composite sliding surface to couple actuated and unactuated states, while an Interval Type-2 fuzzy approximator based on the Nie–Tan type-reduction method efficiently estimates uncertainties with reduced computational complexity via adaptive laws. Meanwhile, a descriptor-based observer constructed from a T-S descriptor model reconstructs the required state variables. The red lines represent measurable variables, the blue lines indicate the estimated variables, and the black lines denote the desired points and the composite sliding surface. Control structure.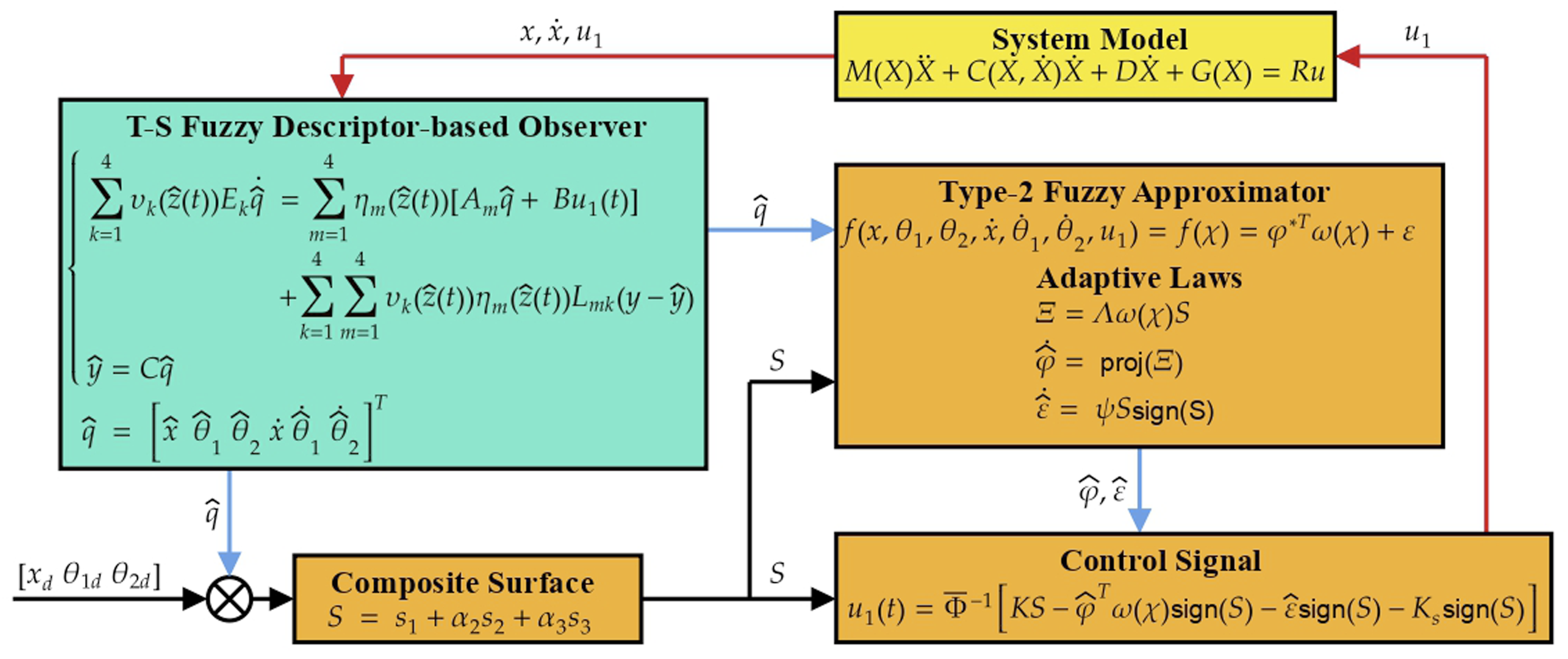
The theoretical proof is completed by establishing the stability of the AIT2FC, followed by the convergence of the observer, and finally the Lyapunov-based stability of the overall integrated AIT2FC-DO system.
3.1. Actuated–underactuated decomposition
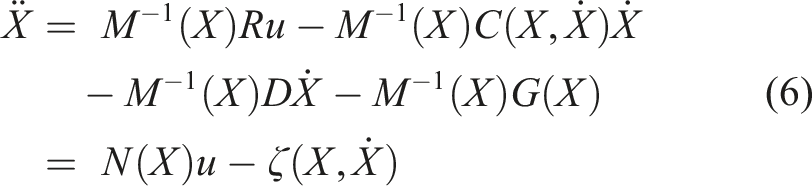
According to equations (1) and (2), the LSCS is defined as a single-input multi-output (SIMO) underactuated system. In this setup, the position x serves as the actuated state, whereas the angles θ1 and θ2 represent the underactuated variables. These angles reflect the coupled sloshing dynamics, which are influenced indirectly through internal system interactions involving the trolley acceleration (Yang et al., 2021).
Given the predefined system parameters m1, m2, l1, l2, i1, i2, ν and the bounded state variables Under Assumption 1, equation (1) can be reformulated to facilitate further analysis as below: Based on the kinematic equation (1) of the LSCS, it is evident that the actuated state x is strongly coupled with the two underactuated states θ1 and θ2 via the horizontal acceleration




3.2. Adaptive interval type-2 fuzzy control with composite surface
The composite surface of the proposed method is formulated using the tracking errors between the actual state variables
Then, the normal sliding surfaces are defined as the auxiliary variables:
The corresponding unactuated auxiliary variables are then integrated with the actuated state to construct the composite surface S, as follows:


By substituting equations (7) and (8) into equation (12), the time derivative of the composite surface S is represented as:
To mitigate the impact of


It should be noted that, in (14),
Finally, an adaptive control law is constructed to guarantee stability and tracking performance, defined as:

The corresponding adaptation laws for
3.3. T-S descriptor modeling
Before designing the T-S descriptor-based observer for the LSCS, equation (1) must be transformed into a nonlinear descriptor state-space form (Guelton et al., 2008). By defining the state vector as

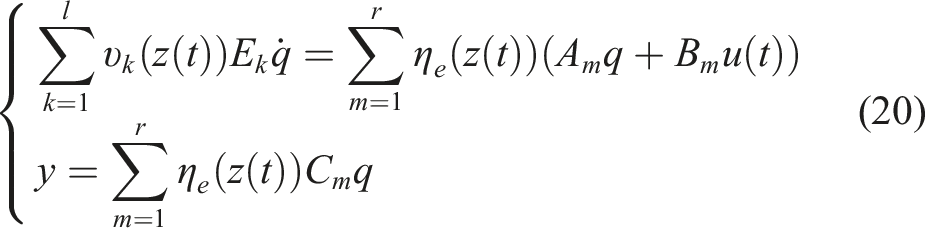
In descriptor form, the T-S fuzzy representation produces multiple LTI models that are smoothly combined using nonlinear functions:
In the T-S descriptor framework, the number of LTI subsystems depends on the nonlinear terms considered. As the number of nonlinear terms increases, the resulting analysis becomes more conservative. For the generic nonlinear descriptor state-space model of the LSCS, Assumption 2 is introduced to mitigate this conservatism by neglecting negligible nonlinear terms.
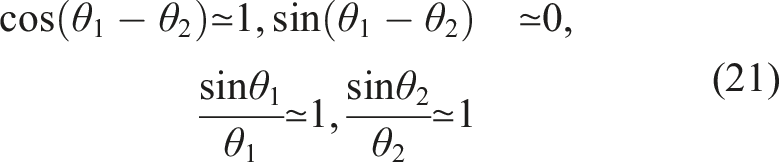
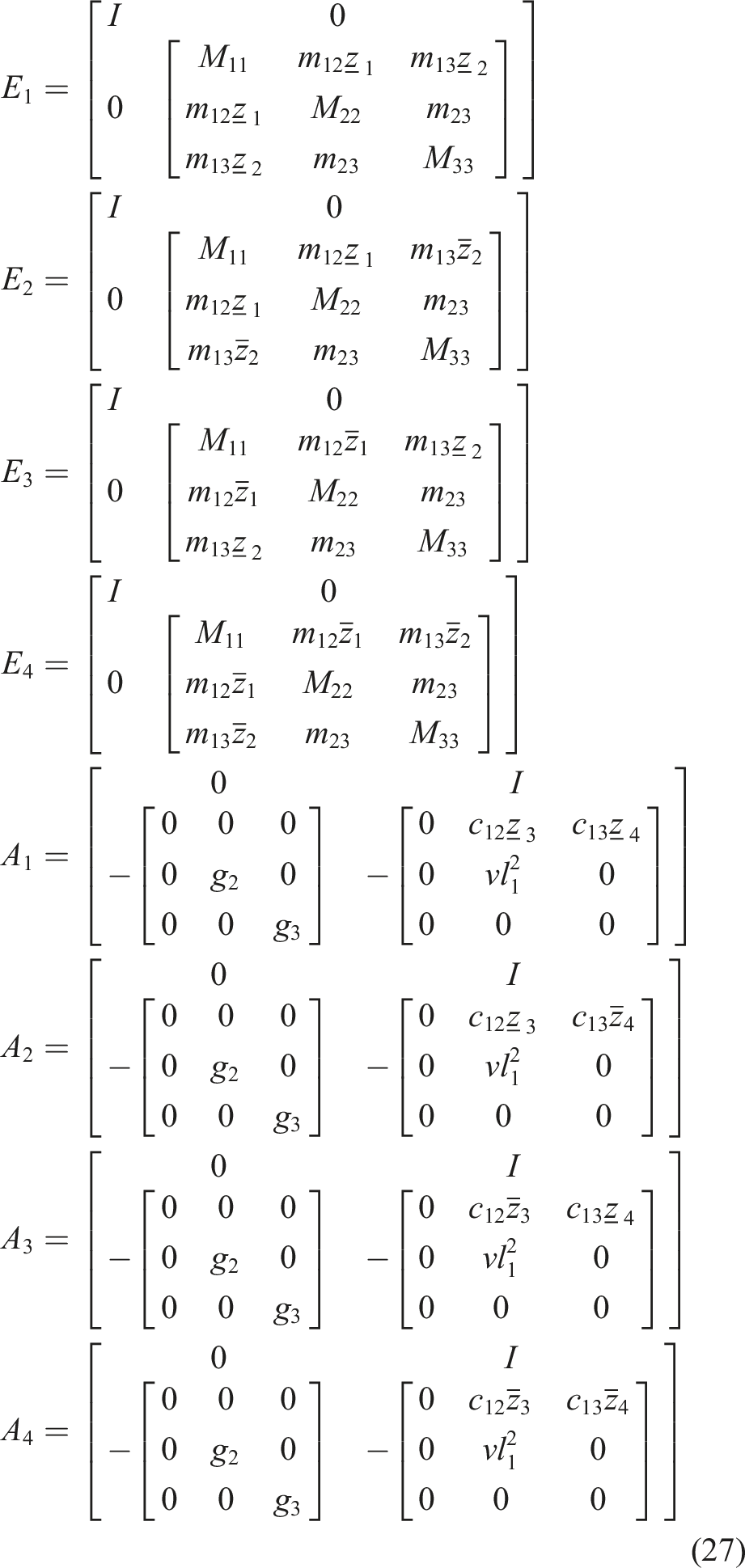
Within the LSCS system, the swing angles θ1 and θ2 are assumed to remain sufficiently small, aligning with the control objective to minimize their magnitudes. Consequently, the associated nonlinear terms are linearized under the constraints Subsequently, since only the matrices E(q) and A(q) contain nonlinear terms, which are selected as the premise variables, defined as below: Thus, the matrices E
k
and A
m
for the LTI subsystems are formulated as: Finally, the LSCS can be represented by the following simplified T-S fuzzy descriptor model:





3.4. Fuzzy T-S descriptor-based observer
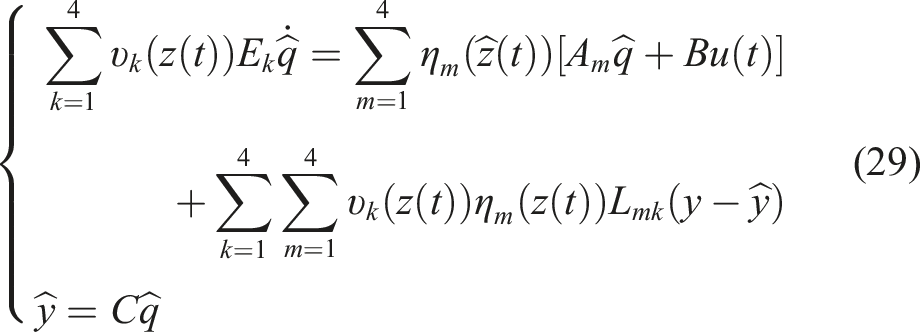
By utilizing equation (28), a nonlinear descriptor-based observer for the LSCS is proposed as follows:
Notably, in the convergence analysis, the existence of the mismatched term
4. Stability and convergence analysis
This section presents a step-by-step stability analysis of the proposed control scheme. First, the stability of the adaptive interval type-2 fuzzy control (AIT2FC) is established by demonstrating the convergence of the composite surface by Lyapunov techniques. Next, the convergence of the estimation error for the descriptor-based observer (DO) is proven. Finally, the overall closed-loop system is shown to be asymptotically stable under the combined AIT2FC-DO framework.
4.1. Stability of the AIT2FC
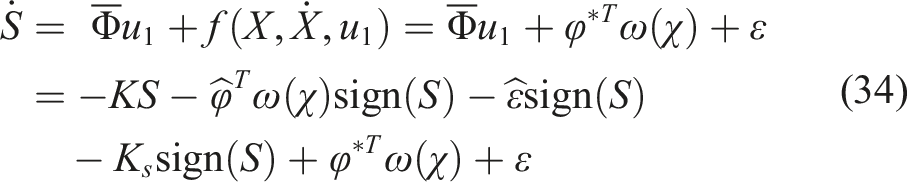
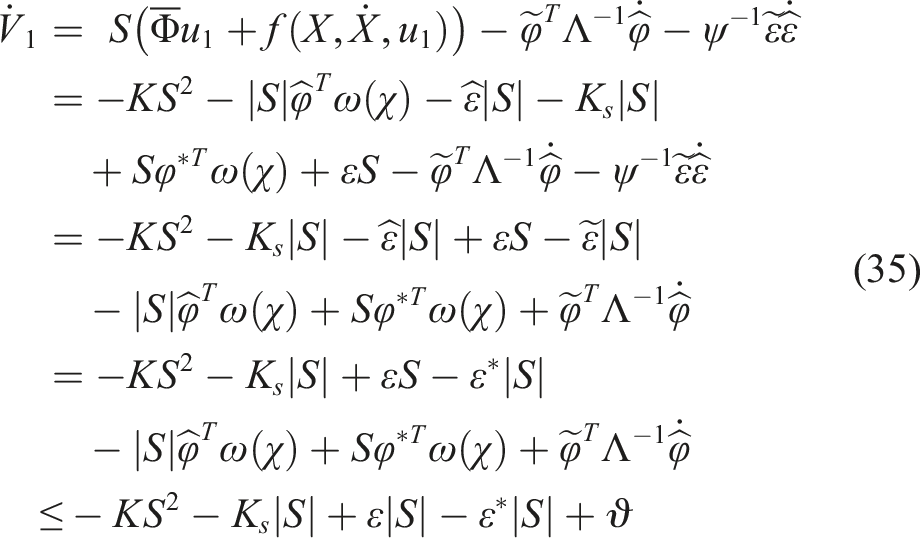
If the initial parameters in equation (17) are selected such that Proof: Appendix A. To establish the stability of the proposed AIT2FC controller and prove that the composite surface and tracking errors converge to zero within a finite time T, a candidate Lyapunov function is selected as follows: Combining equations (13), (14), and (16), the time derivative of the composite surface By substituting equation (34) into equation (33), the time derivative of V1 can be rewritten as follows: By using equation (31) of the Lemma 1, the inequalities −KS2 ≤, − K
s
|S| ≤ 0, and the fact that ɛ|S| − ɛ∗|S| ≤ 0 (since |ɛ| ≤ ɛ∗), the following inequality is proven: Therefore, the estimation error Moreover, to prove that the composite surface S converges to zero within a finite time, the Lyapunov function V2 is constructed as: Taking the time derivative of V2 and substituting equation (34), the following equation is yielded: Based on equation (30), the condition Integrating both sides of the differential inequality in equation (40), the following results are yielded: Consequently, V2(T) = 0 is achieved within a finite time T. In other words, the composite surface converges to zero after the convergence time T, which is proven by the following expression: Therefore, after the finite time T, since S = 0 for all t ≥ T, equation (11) can be rewritten as follows: By introducing a new state vector Subsequently, equation (44) can be rewritten in matrix-vector form as follows: Furthermore, since the matrix A
ϵ
is in a canonical form, the controller parameters λ1, λ2, λ3, α2, and α3 can be designed to be strictly positive such that the characteristic polynomial of A
ϵ
satisfies the Hurwitz criterion. Consequently, according to the Lyapunov equation, there exist two positive definite matrices P
ϵ
and Q
ϵ
such that: P
ϵ
A + A
T
P
ϵ
= −Q
ϵ
. Then, the following Lyapunov function is selected: The derivative respect to time of V3 can be yielded as: Under Assumption 1 and based on the components of ζ defined in equation (7), the following evaluation is established: From equations (9) and (43), the following inequality is also derived: By substituting equations (49), (50), and (51) into equation (48), the time derivative of V3 is evaluated as follows:













Note that f(‖ϵ‖) = Ψ1‖ϵ‖2 − Ψ2‖ϵ‖ represents a parabolic function with respect to ‖ϵ‖ > 0. The condition Ψ1 > 0 is satisfied by appropriately designing the control gain acting on ϱ such that
Consequently, by initializing the system such that ‖ϵ(0)‖ ∈ (0, Ψ2/Ψ1), we obtain

Hence, the control system using AIT2FC is stabilized at the equilibrium point.
4.2. Convergence of the estimation error
Sufficient convergence conditions for the T-S fuzzy descriptor-based observer can be derived by expressing equation (29) in an augmented state-space representation:
The augmented estimation error is defined as
Therefore, the convergence of the state estimation error is ensured by finding a feasible set of gains L mk that satisfies the LMI conditions in Theorem 1.
Considering the Takagi–Sugeno (T-S) fuzzy descriptor state-space representation in equation (55), the convergence of the estimation error is ensured if and only if there exist a symmetric matrix Proof: Appendix B.

4.3. Stability analysis of the close-loop system
Given that the estimated states


Based on the estimated states, the candidate Lyapunov function

When
For the closed-loop control system, the overall candidate Lyapunov function is selected as:

By differentiating this function with respect to time and incorporating equations (60) and (74), the following inequality is derived:
Provided that the control parameters K, β, and L are bounded and strictly determined, there always exists a scalar γ that satisfies the condition in equation (63). As a result, the time derivative of the composite candidate Lyapunov function is negative semi-definite (i.e.,
5. Performance evaluation via simulation
In this section, the proposed control methodology for the LSCS is evaluated through simulation results obtained under model parameter uncertainties and compared with the input shaping.
Initially, the parameters of the LSCS employed in this study are given as: m1 = 1.334 kg, m2 = 1.152 kg, l1 = 0.3903 m, l2 = 0.2044 m, i1 = 0.2742 kgm2, i2 = 0.001 kgm2, l = 0.24 m, h = 0.03 m g = 9.8 m/s2, and ν = 0.065 Ns/m. Furthermore, the bounded ranges of the position-related variables and the control signal u1 are also specified to construct the parameters for the membership functions of the fuzzy approximator as follows: |x| ≤ 1 m,
For the adaptive interval type-2 fuzzy control (AIT2FC) scheme, the parameters of the composite surface S (11), the adaptive laws (17), and control signal (16) are selected as follows: λ1 = 0.8, λ2 = 0.5, λ3 = 2, α2 = 0.1, α3 = 0.01, ψ = 5, K = 0.1, K s = 0.05, and Λ is a 7 × 7 diagonal matrix with all diagonal elements equal to 50.
To overcome the chattering phenomenon commonly encountered in methods related to conventional SMC, all sign(S) functions in (16) have been replaced by tanh(5S).
The control parameters λ1, λ2, λ3, α2, and α3 in (11) are selected similarly to those in conventional SMC, where λ3 is assigned the largest value to prioritize the stabilization of θ2. In (16), K and K
s
are the main parameters affecting the convergence time of x and can be tuned to achieve a trade-off between convergence speed and the deviations of θ1 and θ2. The parameters ψ and Λ in (17), associated with the fuzzy approximation, are selected through trial and error to effectively compensate for the effects of unknown parameters and system nonlinearities.
The lower and upper membership functions of the type-2 fuzzy basis function in (15) are defined as:

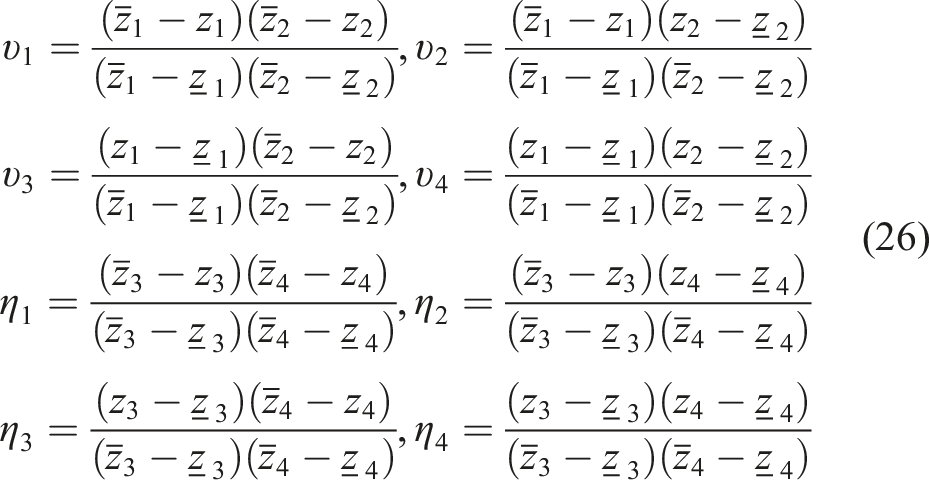
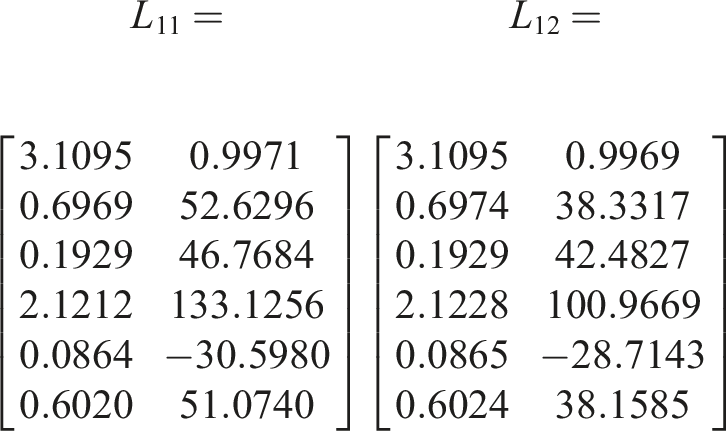
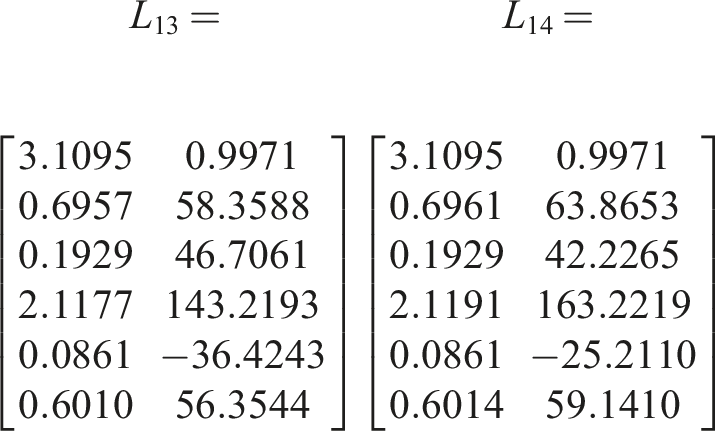
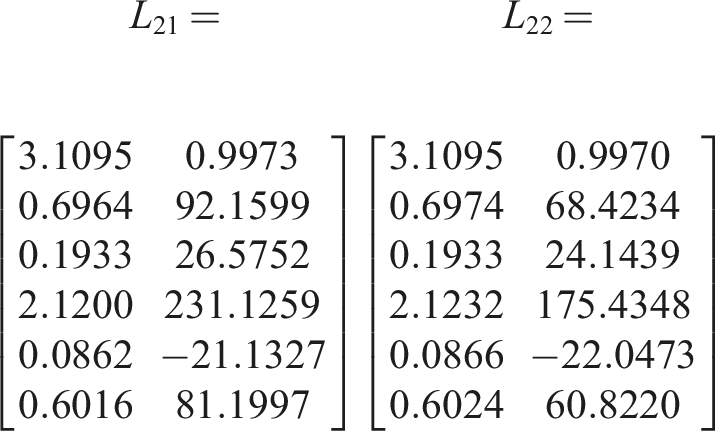
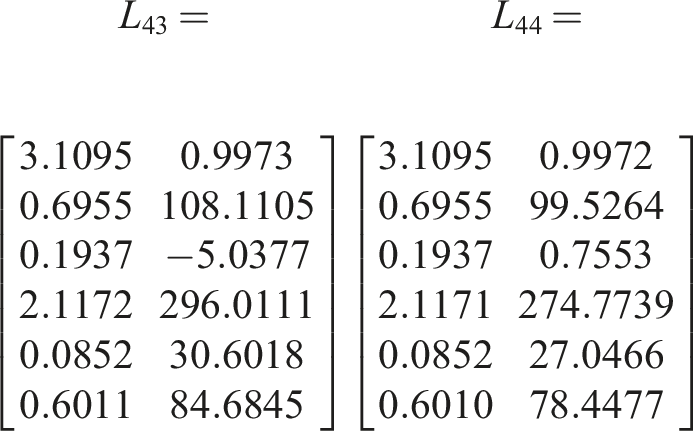
For the descriptor-based observer (DO), the minimum and maximum values of the premise variables z1, z2, z3, and z4 are calculated based on the feasible ranges of the unactuated state variables provided in the physical parameters section. Additionally, the 6 × 6 gain matrices L
mk
in equation (29) are computed by solving the LMI conditions in equation (56), in which P4 = 0.1P3 is imposed to retain the linear formulation. For presentation, only the nonzero first and fourth columns of each 6 × 6 gain matrix L
mk
are arranged in the following reduced form:
Then, the simulations are specifically designed under three distinct cases to demonstrate the robustness and effectiveness of the proposed approach: • • •
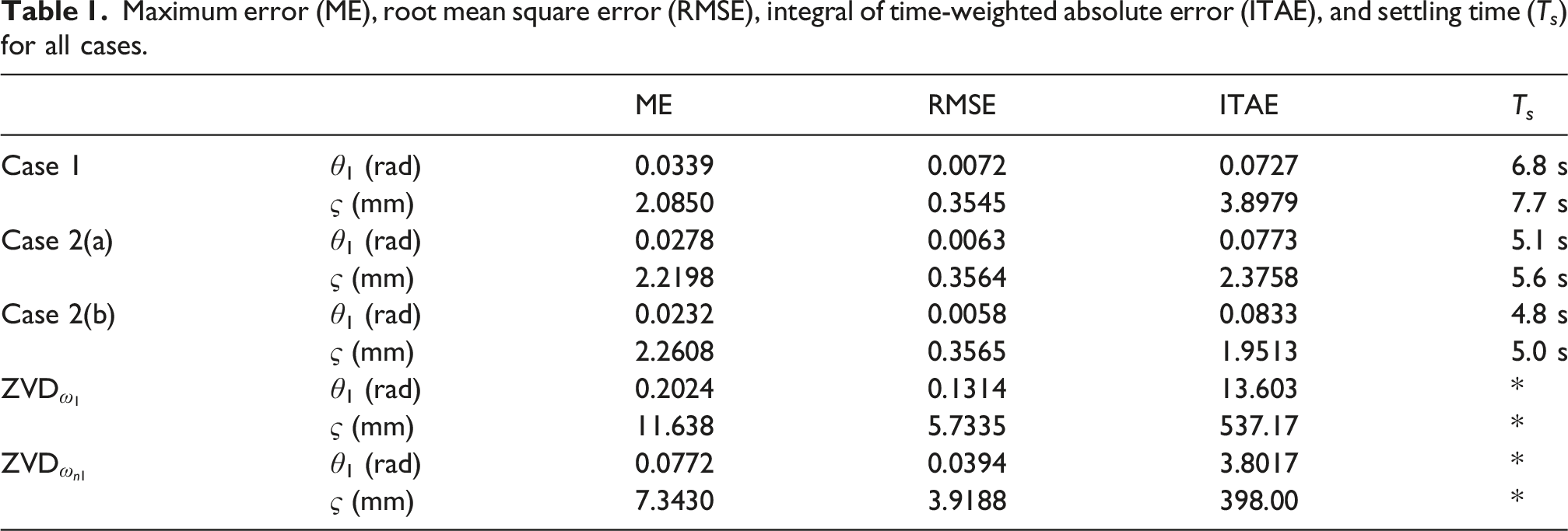
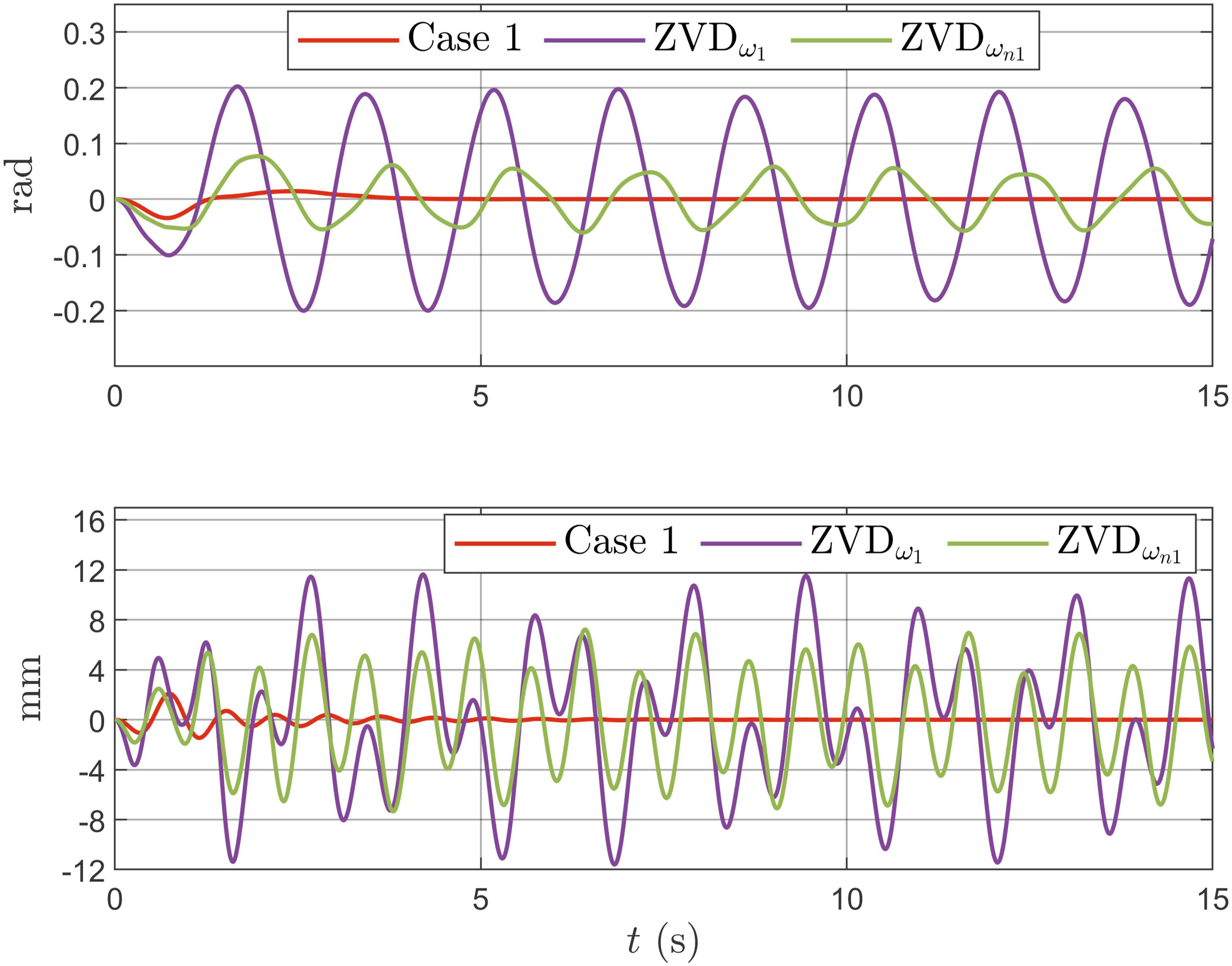
In Case 1, the trolley position x, moving from an initial position of 0 m to a reference position of 0.4 m, and the liquid surface elevation ς, are depicted in Figures 3 and 4. Under the AIT2FC-DO scheme, the trolley rapidly reaches the reference position without overshoot, with a settling time of 7.7 s, as presented in Table 1. According to Table 1, during the trolley motion, liquid sloshing occurs with an ME of 2.085 mm (approximately 7% compared to the liquid depth h) and a RMSE value of 0.0072 mm. As observed in Figure 4, the sloshing amplitude gradually decreases over time and steadily converges to zero before 10 s. Even the accumulated ITAE in Case 1 remains very small at only 0.0727 mm. These results demonstrate that the proposed methodology can accurately and rapidly drive the LSCS to the reference position while effectively suppressing liquid surface oscillations. Case 1-2-3: The tracking position x(t) of the trolley. Case 1-2: The swing angle θ1(t) of the rod–container system and the liquid surface elevation ς(t). Maximum error (ME), root mean square error (RMSE), integral of time-weighted absolute error (ITAE), and settling time (T
s
) for all cases.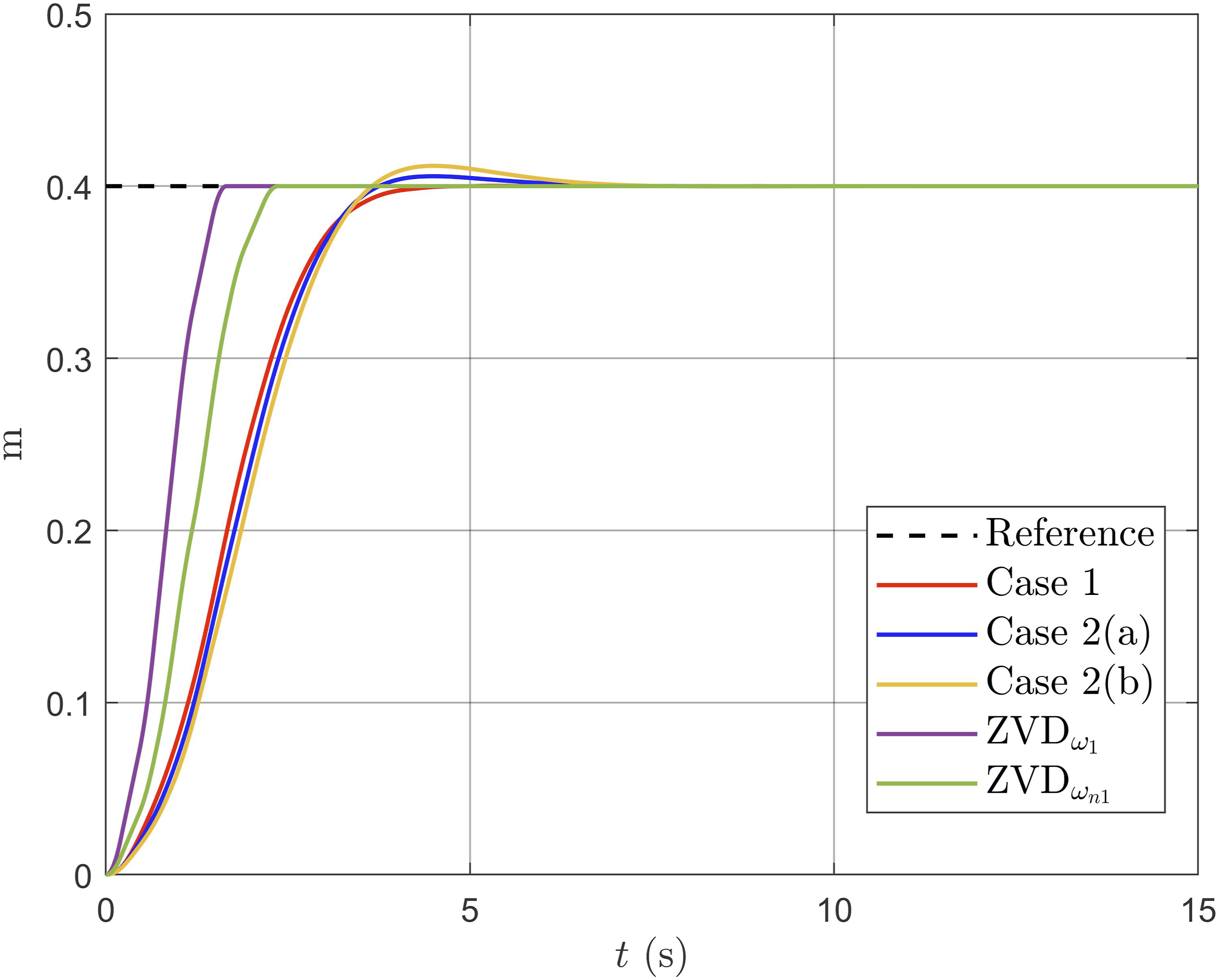
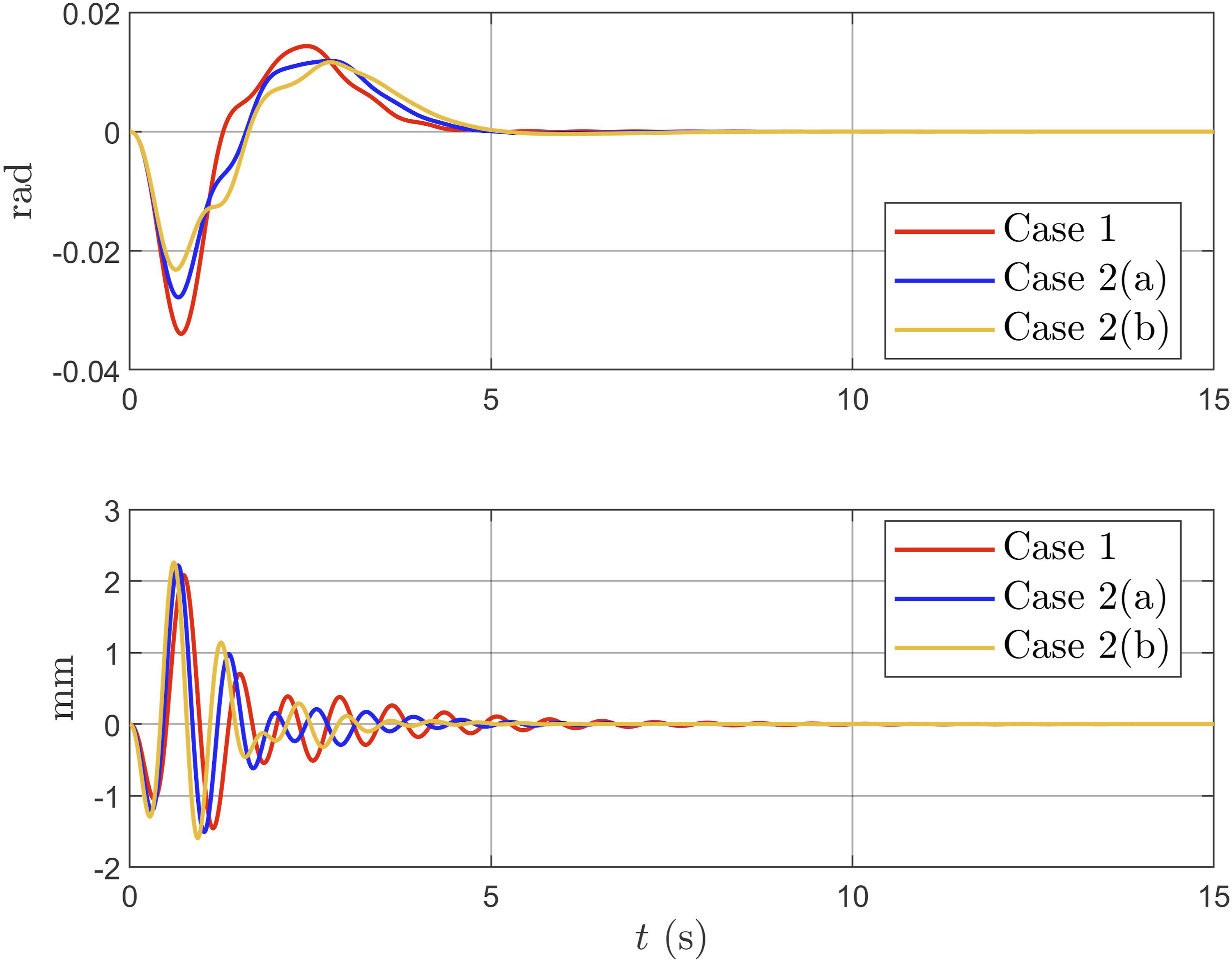
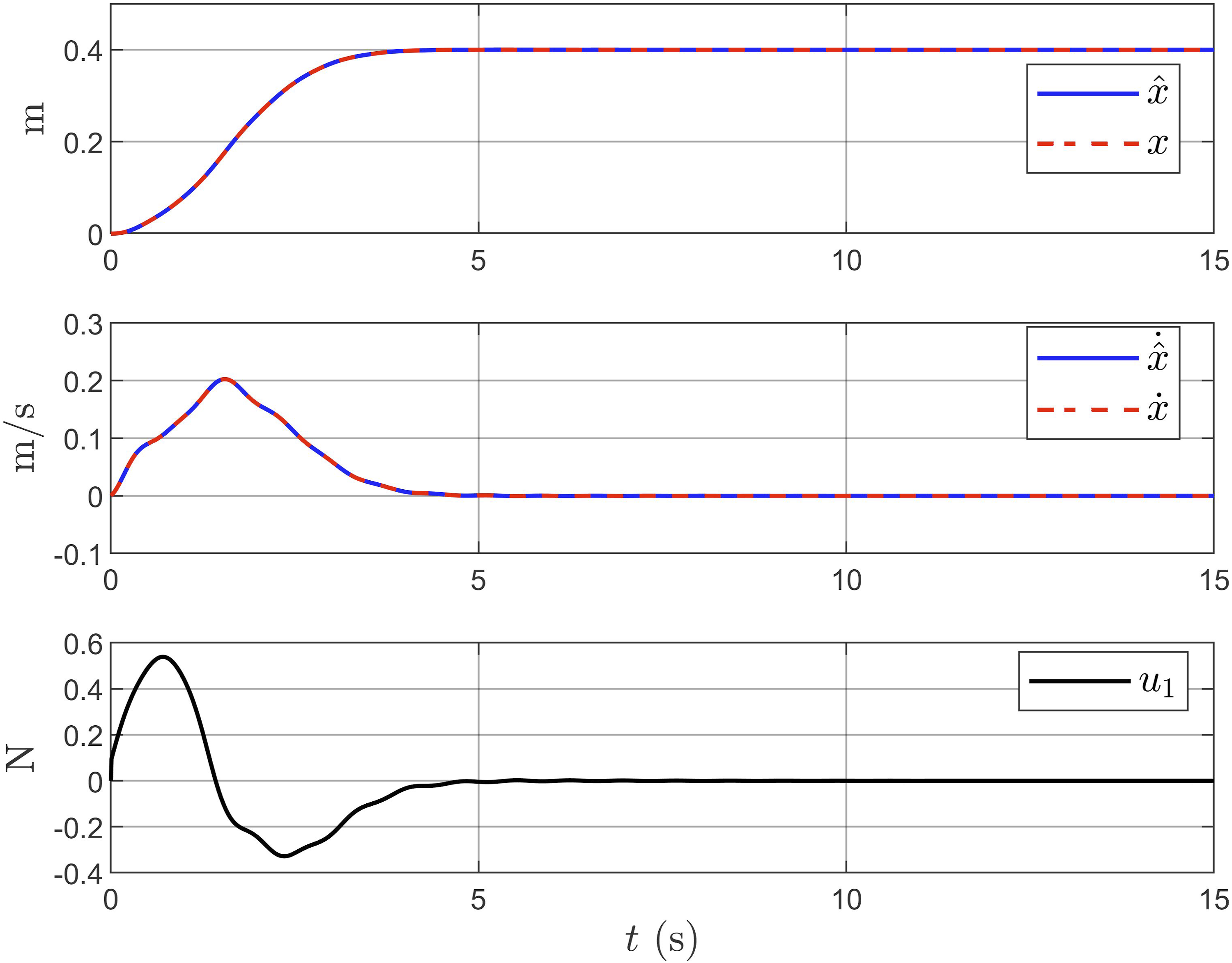
Furthermore, the remaining state variables of the LSCS and their corresponding estimations in Case 1 are presented in Figures 5 and 6 to verify the control capability of the AIT2FC and the state estimation performance of the DO. Specifically, the rod swing angle from equilibrium θ1 and the sloshing-pendulum angle θ2 are maintained within the range of −0.03 rad to 0.02 rad, where the ME of θ1 is 0.0339 rad, as reported in Table 1, indicating relatively small oscillations. Based on Figure 5, both θ1 and θ2 rapidly converge to zero immediately after 6.8 s, and the oscillations are effectively suppressed. In Figure 6, by replacing sign(S) with tanh(5S) in (16), the control signal becomes smooth without exhibiting chattering phenomena. Moreover, all LSCS states involved in the control signal synthesis are accurately estimated with negligible and rapidly converging estimation errors. Consequently, the AIT2FC maintains effective performance when DO-estimated states are employed, demonstrating the effectiveness of the AIT2FC-DO scheme in scenarios where certain state variables are not directly measurable (Figure 7). Case 1: Estimation of the angle and angular velocity for θ1 and θ2 during trolley position regulation. Case 1: Estimation of the trolley position, trolley velocity, and control signal u1 during the regulation process. Cases 1-3: Comparison of the proposed method, 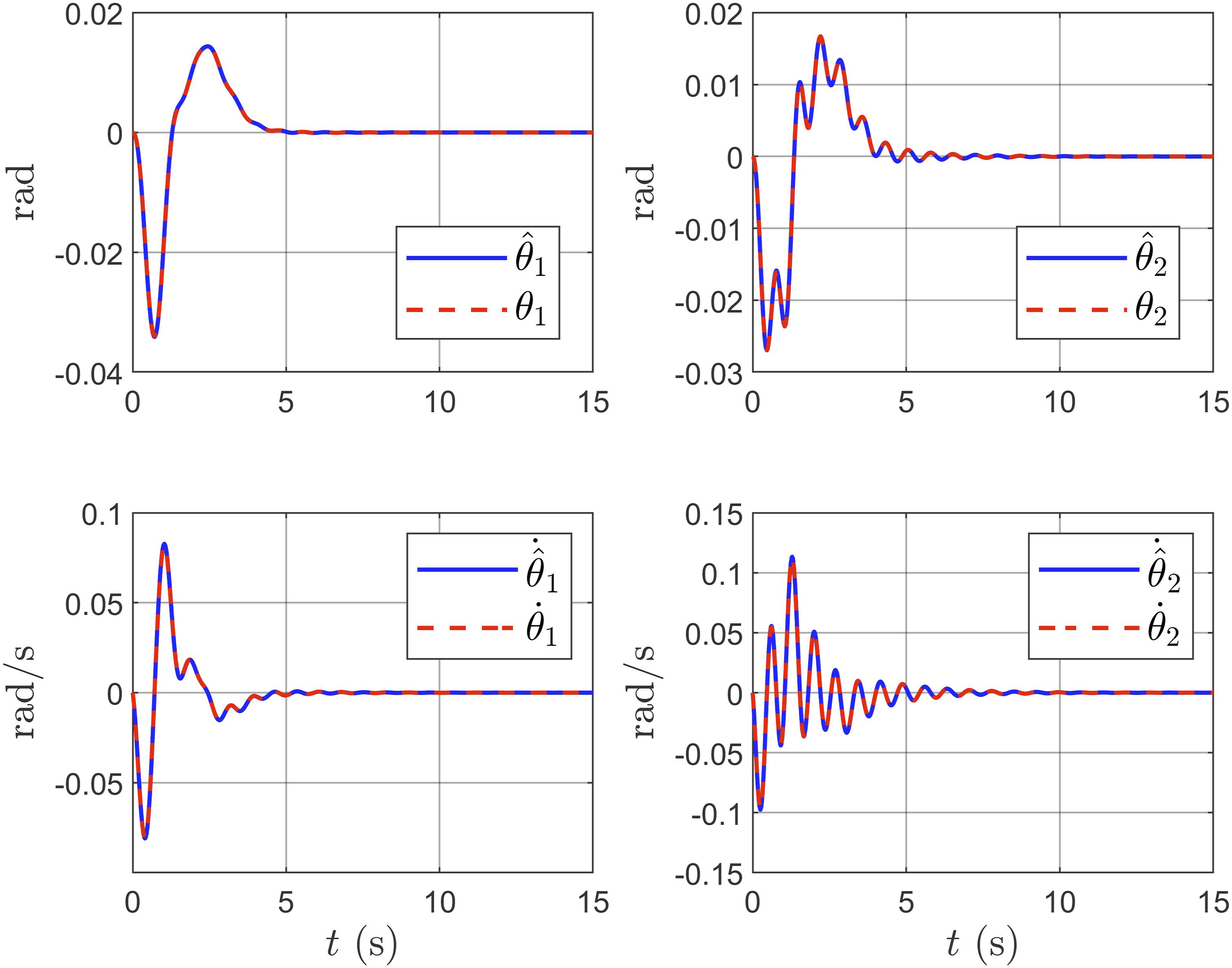
In Case 2, the liquid mass m2 is varied according to scenarios (a) and (b), directly affecting the mathematical model, while the container length l influences the liquid elevation through equation (3). The corresponding results are shown in Figures 3 and 4. From Figure 3, Cases 2(a) and 2(b), represented by the blue and yellow-orange curves, exhibit overshoots of approximately 1.43% and 2.95%, respectively. However, the settling time in Case 2 decreases by approximately 2 s compared to Case 1, as evidenced in Table 1, with T s = 5.6 s for Case 2(a) and T s = 5.0 s for Case 2(b). Nevertheless, the overall stability performance of the trolley position is well maintained under the AIT2FC-DO scheme.
Specifically, the liquid elevation slightly increases with the variations in m2 and l, reaching an ME of 2.2198 mm for Case 2(a) and 2.2608 mm for Case 2(b), compared to 2.085 mm in the nominal case, as shown in Table 1. Even when the model parameters are increased by +50% and +100%, the oscillation amplitude remains sufficiently small, demonstrating the capability of the AIT2FC-DO controller to handle parameter uncertainties. Moreover, increasing m2 improves the stability of the swing angle θ1, with the RMSE significantly reduced to 0.0063 rad and 0.0058 rad for Cases 2(a) and 2(b), respectively. However, based on the ITAE criterion, the damping performance slightly deteriorates since the ITAE values in Case 2 are consistently higher than those in Case 1. Conversely, the sloshing vibration exhibits reduced chattering and shorter settling times T s for both θ1 and ς. These results indicate that the proposed control scheme maintains accurate positioning performance and strong robustness against parameter uncertainties.
The proposed methodology is compared with the input shaping
Based on the performance analysis of the LSCS in Cases 1 and 2, the AIT2FC-DO exhibits strong adaptability, robustness, and effectiveness in driving the trolley position to the reference point with no or minimal overshoot, while reducing oscillation amplitude and rapidly suppressing oscillations once the desired position is reached, using only two assumed measurable variables from the system model under both nominal conditions and parameter uncertainties.
6. Conclusion
The LSCS presents a significant challenge due to its underactuated nature and strong dynamic coupling under the presence of unmeasured variables and model parameter uncertainties, thereby requiring a robust and effective control strategy. In this study, the proposed AIT2FC-DO addresses both issues related to unmeasured variables and model parameter uncertainties. By incorporating an Interval Type-2 fuzzy approximator based on the Nie–Tan type-reduction method, the uncertain components are effectively handled through adaptive update laws, while the composite sliding surface is designed to deal with the underactuated nature and strong dynamic coupling, ensuring the stability of the LSCS. The problem of unmeasured state variables is resolved by the Descriptor-based Observer, where the estimation errors are small and converge rapidly to zero. Furthermore, the stability of the overall system under the integrated AIT2FC-DO framework is guaranteed based on Lyapunov stability analysis. Simulation results demonstrate that the AIT2FC-DO not only ensures system stability under nominal conditions but also successfully stabilizes the system in the presence of uncertainties related to liquid mass and container length, confirming the effectiveness and robustness of the proposed methodology. In comparison with the input shaping, the time required to reach the desired position is longer; however, the liquid surface elevation is driven to zero immediately after the desired position is reached when the AIT2FC-DO scheme is employed. Future work will focus on the experimental implementation of the proposed approach on a real LSCS testbed to further validate its practical applicability.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the Vietnam National Foundation for Science and Technology Development (NAFOSTED) under grant number 107.01-2025.39.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Appendix A
As mentioned previously, the optimal constant φ
j
in equation (14) is typically bounded by an upper bound Case 1: When Case 2: Otherwise,
To prove equation (31), the term ϑ is decomposed as:
Next, since the control parameter Λ
j
is chosen to be strictly positive and the fuzzy basis function satisfies ω
j
(χ) ≥ 0, it follows from equation (17) that the sign of the composite surface S can be inferred from Ξ
j
.




From the above four cases, it can be concluded that ϑ j ≤ 0 for j = 1, …, 9. Consequently, ϑ ≤ 0, and equation (31) in Lemma 1 is proven.
Appendix B
Equation (55) is stable if and only if the candidate Lyapunov function
The Lyapunov function must be positive definite:
The time derivative of the Lyapunov function must be negative definite