
Abstract
Various issues raised by the mechanics of an octopus’s arm are presented from the point of view of continuum mechanics. First, we study the conditions for a mixture of a number of fiber bundles to span the space of stress tensors. The geometry of a fiber bundle, as reflected in the direction and density of the fibers, is described by a vector field, or, more precisely, by a differential two-form. For the stress analysis, we propose a three-dimensional continuum model of the arm that is based on constitutive data available for muscle fibers. An analysis of small deformations superimposed on an activated configuration of the muscle bundles reveals the stiffening mechanism which enables the arm to support various external loadings, even if the geometry and the number of the fiber groups does not allow the tensions in them to span the space of stress tensors.
1. Introduction
The octopus’s arm belongs to a family of organs termed muscular hydrostats which also contains the human tongue and elephant’s trunk. Muscular hydrostats are characterized by the absence of rigid skeletons. They consist of densely packed three-dimensional array of muscle fibers, and are usually considered incompressible [1]. Incompressibility, together with the particular arrangement of the muscle fibers, enables the octopus to control the arm, compensating for the lack of rigid links and the inability of the muscles to support compression. The efficiency of such a structure and the prospect of mimicking it in a continuous robotic manipulator has motivated the interest in the mechanical aspects of the arm. (See, for example, [2–5].)
The octopus’s arm contains five main groups of muscle fibers: longitudinal fibers, two groups of mutually orthogonal transverse fibers and two groups of right-handed and left-handed helicoidal fibers. (See Figure 1. For a detailed study see [6].) Thus, using incompressibility, the octopus can extend the arm by contracting the transverse muscles. Alternatively, the arm may be extended by using helicoidal muscles. Helicoidal fibers exist in three different layers: internal, median and external, where the last two are positioned close to the circumference of the arm. The mean pitch angle for the external and median oblique muscle fibers is 62° whereas internal oblique muscle fibers have a lower mean pitch angle of 49°.
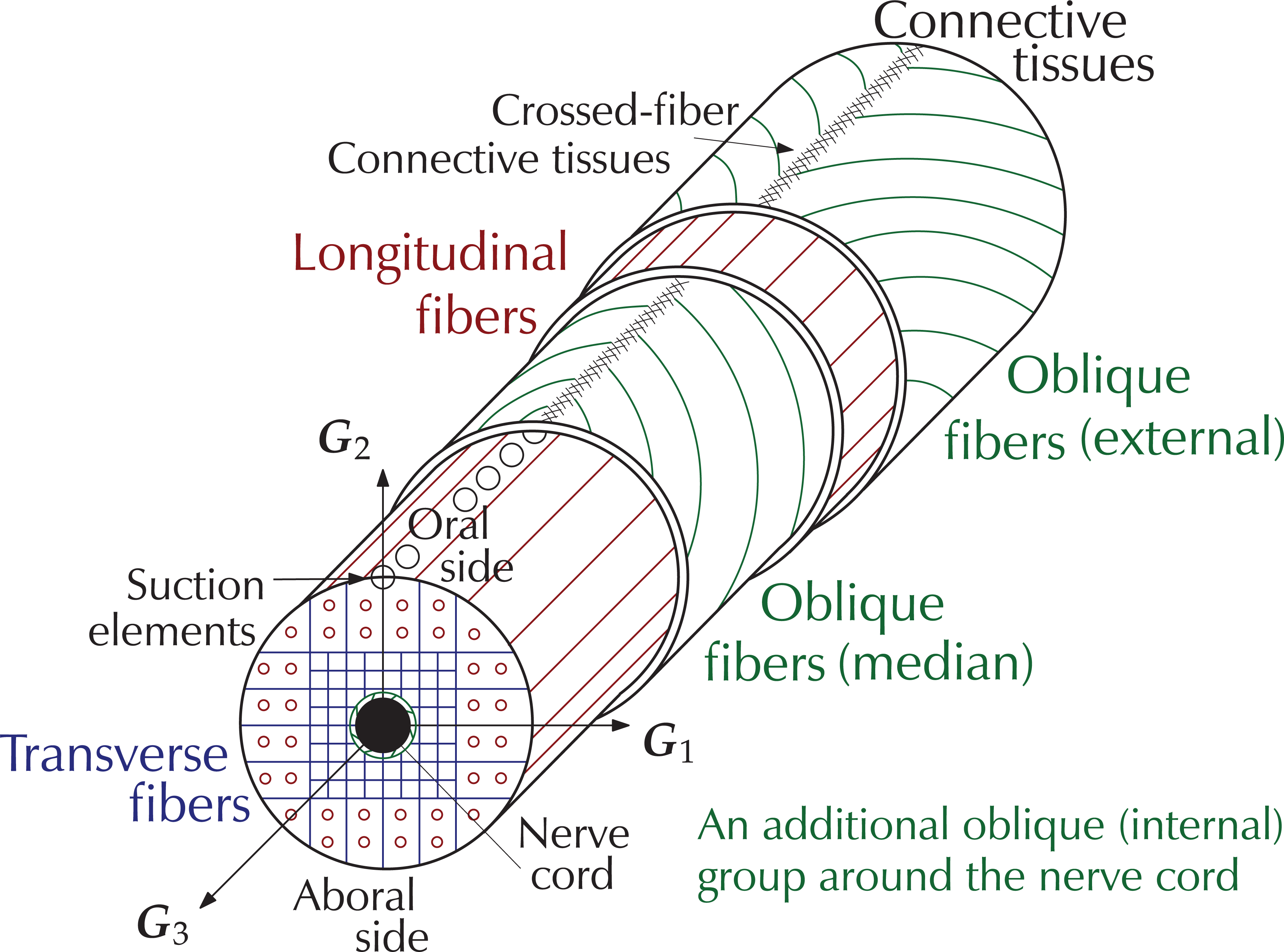
The muscular structure of an octopus’s arm.
One may easily compute the pitch angle for which the extension of the arm will not induce any strain in the helicoidal fibers. Let

Letting

which gives a pitch angle of 54.73°, the magic angle. Thus, activating the internal helicoidal muscles will contract the arm and activating the external and median oblique fibers will extend the arm.
In this work we consider various aspects of the mechanics of an octopus’s arm from the point of view of continuum mechanics. Specifically, we make an attempt to capture the way the morphology of the arm enables the arm to support external loadings. Conceiving the arm as a mixture of groups of muscle fibers in a number of directions, we first wish to study the conditions under which tensions in the fibers span the space of stress tensors at a point. This geometric problem is considered in some detail in Section 2. We observe that, with the incompressibility constraint, the arm functions similarly to a tensegrity structure.
In Section 3 we propose a convenient geometric description of a bundle of (muscle) fibers and the kinematics of the bundle. Then, we examine the various stress tensors induced by a mixture of intertwining fiber bundles as a model of a muscular hydrostat.
The constitutive theory for muscle fibers (e.g. [7, 8]) is rather complicated. Thus, after a short review, we propose in Section 4 a simplified loading scenario in which the arm of the octopus is first brought from a reference configuration to an inactive intermediate configuration under no external loading and negligible activation. In the second stage, the arm is activated isometrically, and, finally, the arm is loaded under fixed activations of the muscles and it is assumed that the resulting superimposed deformations are small. Linearization of the expressions for the stress shows how the arm stiffens due to the prestress generated by the activation. Moreover, this geometric stiffening enables the arm to support various external loadings, even if the geometry and the number of fiber groups do not allow the tensions in them to span the space of stress tensors.
Finally, we consider in Section 5 the stress analysis problem for a mixture of activated muscle bundles. The expression for the divergence of the stress is specialized to the situation under consideration. The stress analysis problem for the isometric activation stage is indeterminate. Thus, the octopus has the freedom to activate the muscle fibers based on additional considerations such as the stability and rigidity of the arm when acted upon by additional external loading. For given activations of the muscle groups and a given external load, the stress analysis problem is determinate, as expected.
2. Bases for the space of symmetric tensors induced by mixtures of fibers
It is assumed in this work that the stress tensor at a point in the muscular hydrostat is the sum of uniaxial stress tensors produced by tensions in the five groups of muscle fibers with the addition of hydrostatic pressure as implied by the incompressibility constraint. A natural question one may pose in this context is what is the subspace of symmetric 3 × 3 tensors that may be spanned this way and how does this subspace depend on the geometry of the fiber bundles. In particular, if the arm of the octopus is to support various loads, it seems natural to find out the conditions for the geometry of the fibers so that the whole space of stresses may be spanned. This section deals with this problem and related issues. We begin with a study of the implications of the structure for a general mixture of six fiber bundles on the possible states of stress. Then, we move on in our analysis and consider five fiber bundles with additional hydrostatic pressure.
2.1. Bases for the space of symmetric tensors
In the following analysis we consider the possibility of spanning the space of all stress tensors using six fiber bundles. Given the vectors

Evidently, if there is no triplet of vectors that are linearly independent, the family of six vectors will not span the space of tensors. Thus, we may choose three linearly independent base vectors which we enumerate as

where (wn)
i
=
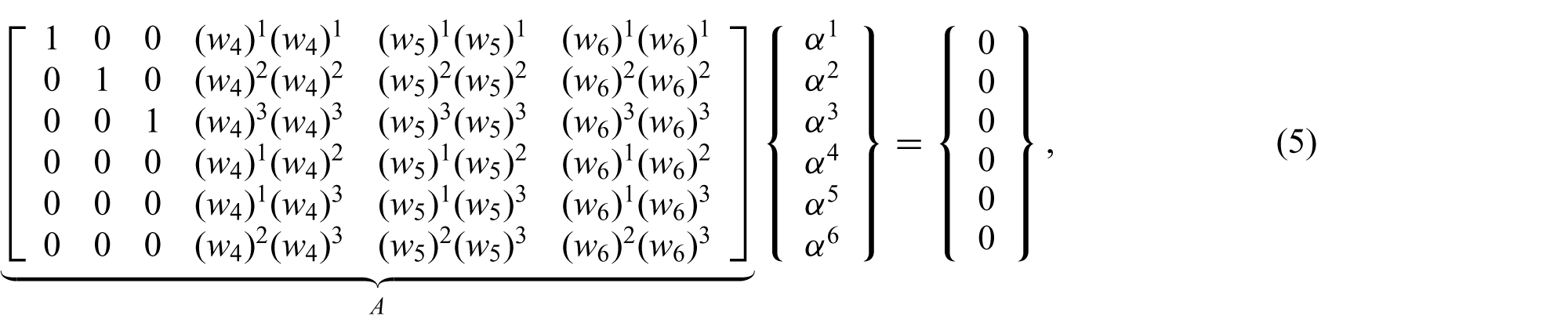
where the matrix of coefficients is denoted by A. Thus, one may write the necessary and sufficient condition as

where i, j, k and p, q, r are permutations of 1, 2, 3 and 4, 5, 6, respectively. The condition for the determinant in (6) may be rewritten as

by expanding the determinant by the first row.
Let C denote the set of all sextuplets of vectors in
N1 There are no pairs of collinear vectors.
N2 No collection of four vectors is situated in a single plane.
N3 There are no two distinct planes containing all six vectors where each plane contains three distinct vectors.
Since
We now let C1 ⊂ C be the subset containing elements for which at least one collection of three linearly dependent vectors exist. Using (7), it is easy to show that C1 ∩ N1 ∩ N2 ∩ N3 ⊂ D, so that it determines a sufficient condition. Next, we consider

where none of the coefficients vanish since all triplets chosen from the collection {

The last inequality represents the following sufficient condition for the vector

The form of condition (9) implies that singular solutions do exist. As an example, let
We now partition C 1 into the following subsets containing the elements satisfying the respective conditions.
C11: Only one plane contains three vectors. We observe that C11 ⊂ N1 ∩ N2 ∩ N3 and hence C11 is a sufficient condition.
C12: There are exactly two planes each containing three vectors. We further partition C12 into the following subsets.
C121: Each of the two planes contains three distinct vectors. We note that
C122: Each of the two planes contains three vectors and one of the six vectors is shared by both planes. We have, C122 ⊂ N1 ∩ N2 ∩ N3; hence, C122 determines a sufficient condition.
C123: Each of the two planes contains more than one common vector. Clearly, C123 ∩ N1 = ∅.
C13: There are three planes each of which contains three vectors. Note that for the elements of C13, there are three planes each of which contains three vectors. Clearly, C13 ⊂ N1 ∩ N2 ∩ N3 so it determines a sufficient condition.
C1n: There are more than three planes each containing three vectors. It is evident that C1n ∩ N1 ∩ N2 ∩ N3 = ∅.
Next, we consider the subset C2 containing sextuplets for which there are no planes containing three vectors. Clearly, one may consider the partition C2 = C21 ∪ C22, where C21 contains the elements in D, C21 = C2 ∩ D, whereas
C21: A collection of sextuplets such that
C22: A collection of sextuplets such that
Note that, using set subtraction (\), we may finally write

which describes a necessary and sufficient condition.
Remark 2.1. Due to the inability of fibers to produce or sustain compression, a mixture of six fiber bundles (assuming a linearly independent basis

so that
2.2. Bases that contain I for the space of symmetric tensors
We recall that the arm of an octopus is composed of five families of muscle fibers and is assumed to be incompressible. Here, we study the implications of such a structure on the possible states of stress using a procedure analogous to that presented in the preceding section. Thus, taking into account the possible hydrostatic pressure and assuming that five unit vectors,

For the problem at hand, we will use notation which is analogous to that used in Section 2.1 modified by the superscript p. (For example, the set of all quintuplets of vectors will be denoted by Cp.) Hence, the condition that {

By the same algebraic computations as used in Section 2.1, one obtains the necessary and sufficient condition

where i, j, k are the permutations of 1, 2, 3, p, q are the permutations of 4, 5 and gij are the components of the contravariant metric tensor for the basis {

Using equation (16) one may define the following subsets, the elements of which satisfy the respective necessary conditions.
It is easy to show that

Hence, (16) gives us the following sufficient condition:

As an example for which (18) is satisfied, consider a quintuplet that contains a linearly independent triplet for which one of the vectors is perpendicular to the plane spanned by the remaining two, which are not orthogonal. It is still assumed that all the triplets are linearly independent and are not mutually orthogonal.
As a counterexample, one may consider the case where there is a quadruplet of vectors such that, for each partition into two pairs of vectors, the two planes spanned by the two pairs are perpendicular. Again, it is still assumed that all the triplets are linearly independent and are not mutually orthogonal.
We now partition
We next consider the subset
We finally conclude that the collection of quintuplets {

2.3. Active stresses equilibrating hydrostatic pressure
In this section we examine the conditions for the tensions in the activated muscle bundles to equilibrate the pressure in an unloaded octopus’s arm. See Section 4.3 for the particular relevance of this situation in our loading scenario. In such a case,

Thus, it is necessary that {
Firstly, assuming linear independence of

Since the linear independence conditions are indifferent to the magnitude of the vectors

Clearly, Dml depends only on the geometry of the fibers. The condition that the fibers cannot support compression implies that σm > 0 and p > 0 for all m, and, hence, the fibers should satisfy

Next, we consider the conditions for the prestress in the incompressible structure consisting of five fiber bundles to balance the pressure p for an unloaded arm. Thus, equation (20) holds and a necessary condition for nonvanishing values of p is that a sufficient condition for

Remark 2.2. Using (24) and the subsets defined in Subsection 2.2, it is easy to show that hydrostatic pressure in a muscular hydrostat can be equilibrated by appropriately arranged mixtures of either three, four or five muscle groups.
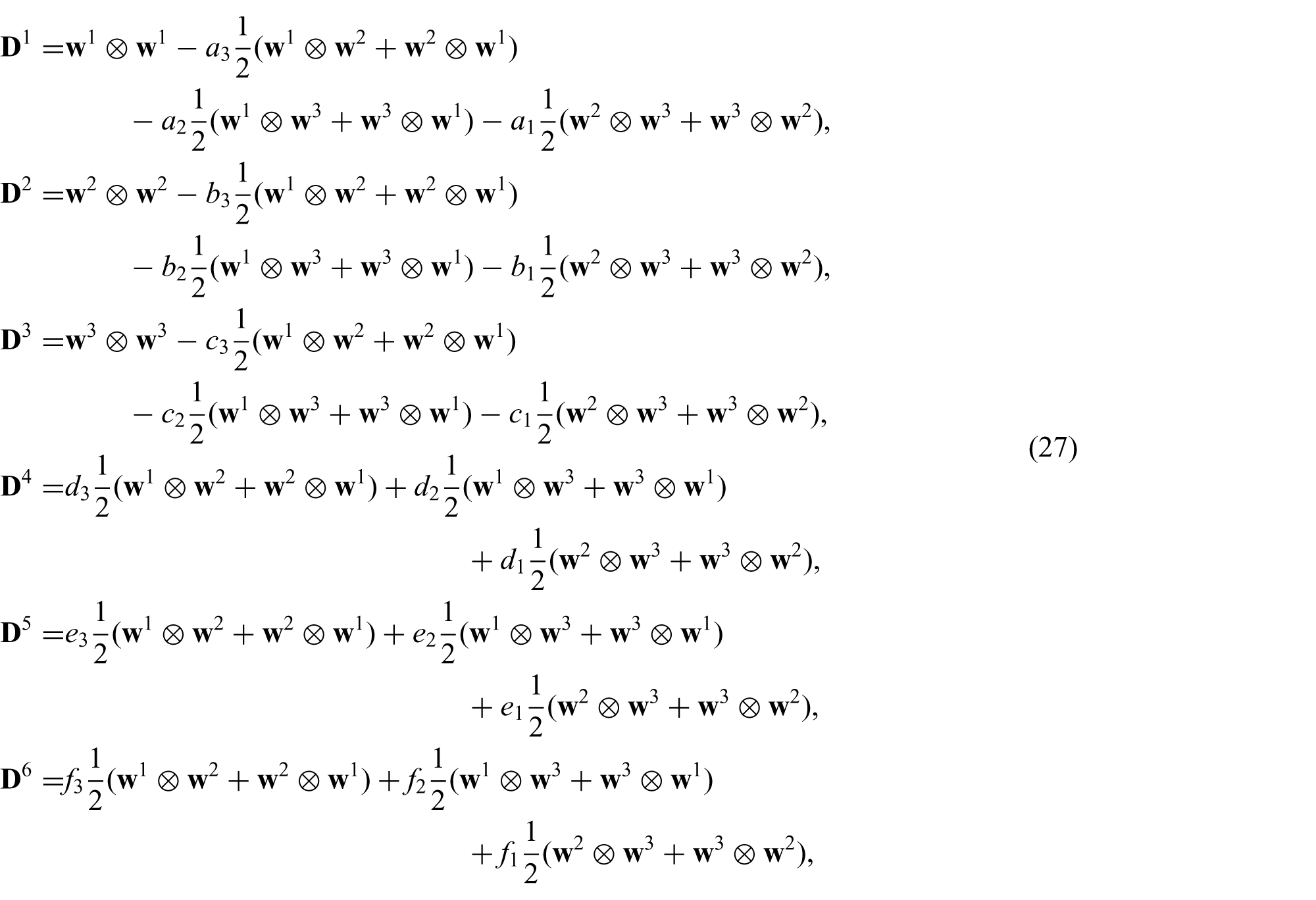
2.4. The corresponding dual bases for the space of symmetric tensors
Consider a given fiber basis, {

It is easy to show that corresponding contravariant basis is given by

The transformations between the covariant bases may be determined by the 6 × 6 matrix [B] such that
where
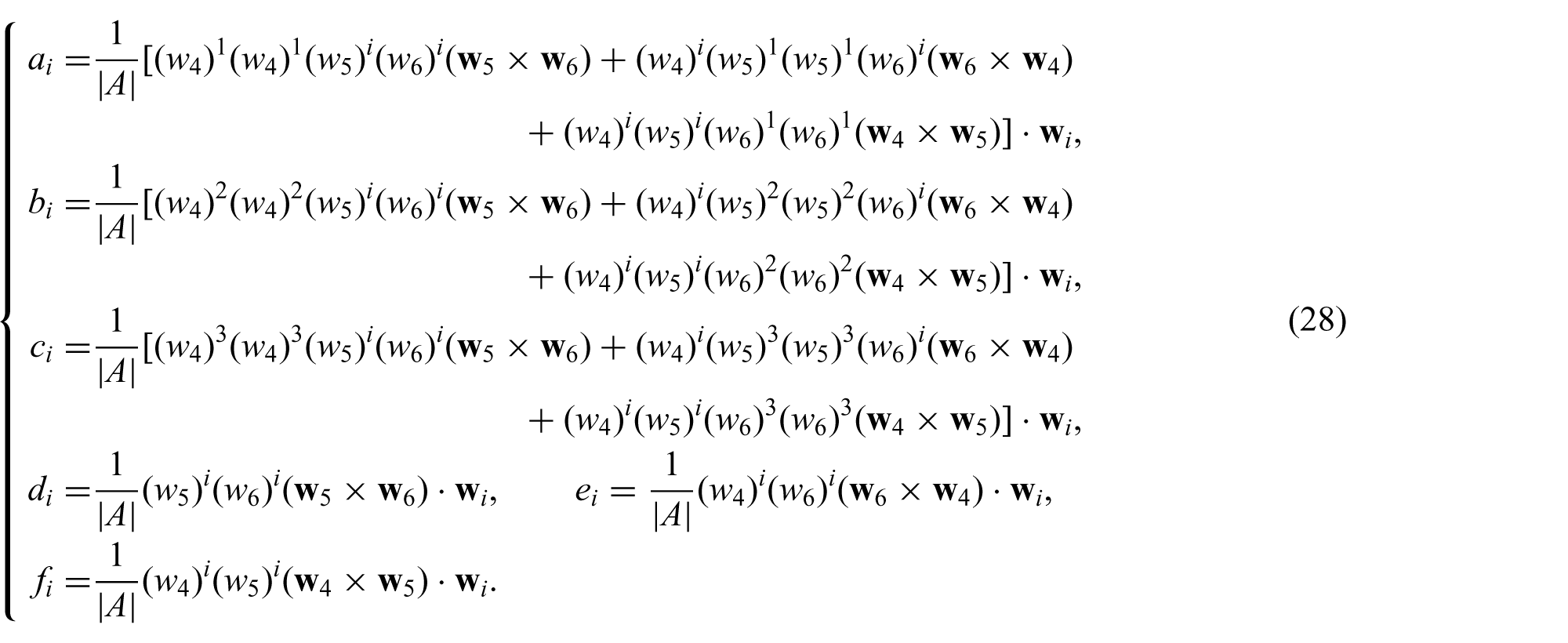
Note that the determinant |A| has been computed in Subsection 2.1.
Remark 2.3. One may give a mechanical interpretation for the contravariant base tensors
3. Geometry, tension in fibers and stresses
In this section, we propose the mathematical object for the representation of the geometry, kinematics and stresses for bundles of fibers. For the objects analyzed, we study the consequences of the incompressibility of the material.
3.1. Kinematics of fiber bundles
We identify a material body with a fixed reference configuration and, assuming that a reference frame has been chosen, a generic material point X is identified with the radius vector
Consider now a deformation κ of the body in space and the deformation gradient
Assuming that the fibers are material quantities carried with the material points at each configuration of the body, it follows that the amount of fibers crossing the area element dA in the reference configuration is equal to the amount crossing its image da. Thus,

Since (29) holds for all

where J ≡ det
In case the deformation is isochoric, J = 1, and the expression above simplifies to

Hence, for isochoric deformations the fiber density vector is strictly transformed according to the same rules as the vectors.
Let ρ0 = |

For the incompressible case,

so that the stretch of the fibers is equal to the ratio between current and reference densities.
Finally, the total amount of fibers that intersect a surface S is

The assumption that fibers are neither created nor destroyed in R implies that, for the boundary S = ∂R of any region R inside the fiber bundle,

Using Stokes’ theorem,

and since the last equation holds for any region R,

3.2. Differential geometry of fibrous bodies
The structure of a fibrous body may be described in a very general framework in which no particular reference configuration is used and in which the body manifold has no specific Riemannian metric. In this work, we use the word fibers in the mechanical sense, as in muscle fibers, rather than in the differential geometric sense.
Let

represents the total amount of fibers that penetrate
Consider a n-dimensional submanifold with boundary

Using Stokes’ theorem, the last equation implies that

where dω denotes the exterior derivative of the structure form. Since equation (40) holds for an arbitrary region

In fact, dω represents the distribution of sources of the fibers. Alternatively, one may think of dω as the distribution of defects in the structure of the fibers.
For a point

Here, v ⌟ ω denotes the contraction (or inner product) of the form ω with the vector v, that is, the (n − 2)-form such that,

It follows that in the case where VX is a subspace of the vector space spanned by a collection of vectors, v1,…,vn−1, the amount of fibers crossing the parallelepiped generated by the vectors v1, …, vn−1 is identically zero. For the Euclidean three-dimensional case, in the analogous situation, the area element determined by the two vectors
To describe the correspondence between the differential geometric framework and that described in Section 3.1, we restrict ourselves to the three-dimensional case. Given a volume element, a nowhere vanishing three-form θ, the structure form ω may be represented by a unique vector field

or, equivalently,

for any pair of vectors v and u in

Thus, the relation between the structure form and the fiber density vector field is

where da is the infinitesimal area of the parallelogram determined by
3.3. Tension in fiber bundles and stresses
According to Cauchy’s theorem, the infinitesimal surface force d

For a fiber bundle, it is assumed that the fibers can support only tension; hence, d

It is clear from (48) and (49) that the Cauchy stress tensor is

representing a uniaxial stress in the direction of the fibers. Substituting (50) to (48), using Nanson’s formula and (30), we find that

Equation (51) describes the action of the first Piola–Kirchhoff stress tensor

It is reasonable to assume that the values of T and ρ0 are those obtained in experiments, since the tension T is known at the current state whereas the density ρ0 is measured at the reference state.
Let d

It is easy to verify that the expressions for the Piola–Kirchhoff stresses are in accordance with the usual formulas given in terms of the Cauchy stress.
Finally, for incompressible deformations, the expressions for the stresses simplify to

We view the arm of the octopus as a body consisting of N intertwining fiber bundles and model it as a mixture with non-interacting constituents, where N fiber density fields are present at each point. (At this point we do not yet impose the incompressibility constraint.) Thus, the Cauchy stress may be written as

By the linearity of the first and second Piola transformations in

Remark 3.1. Consider the stress at a given point in a continuous body. The Cauchy stress tensor

which is identical to the stress in a mixture of three bundles of fibers directed along the principle axes. Therefore, according to (30),

Thus, the second Piola–Kirchhoff stress tensor may be interpreted as resulting from a family of three fiber bundles that are mutually orthogonal at the current configuration, but are no longer orthonormal at the reference configuration.
4. Constitutive theory and its linearization
In this section we adapt a standard constitutive theory for active muscular fiber bundles to our model of the octopus’s arm and linearize it for small deformations superimposed on a finite deformation. Muscular hydrostats such as the octopus’s arm, the human tongue, and the elephant’s trunk use incompressibility to overcome their lack of rigid links and the disability of the fibers to extend actively. For example, active contraction of the transverse fibers will produce passive elongation of the arm, and the capability to support compression along its axis. Here, we study the way the geometry of the activated fibers together with the incompressibility result in the stiffening of the arm and enable it to support various external loads. Unlike some other works formulated in terms of a strain energy function (e.g. [10–13]) we propose a model which is based on the experimentally available data: the dependence of the tension in a myofibril on the extension and activation.
4.1. The constitutive model for muscular fiber bundles
The tension developed by a muscle fiber during its activation depends, in general, on the history of its stretch, stretch rate and level of activation. In our discussion, studying only quasi-static deformations, the dependence on the stretch rate is omitted. We first consider a constitutive model for the activation of a single muscle fiber which assumes additive decomposition [14–16]. In such a constitutive model, the total force T in the fiber is assumed to be the sum of an active contribution, Tact, and a passive component, Tpas, which does not depend on the activation, in the form

Here, λ is the stretch of the fiber, the ratio l/lr between the current length and the unloaded and inactive length, and α is the activation level. The activation parameter takes values in the interval [0, 1], α = 0 for the passive state for which Tact vanishes whereas α = 1 describes the tetanized state of the muscle producing the maximal force for the current length. The experimental data concerning the dependence of
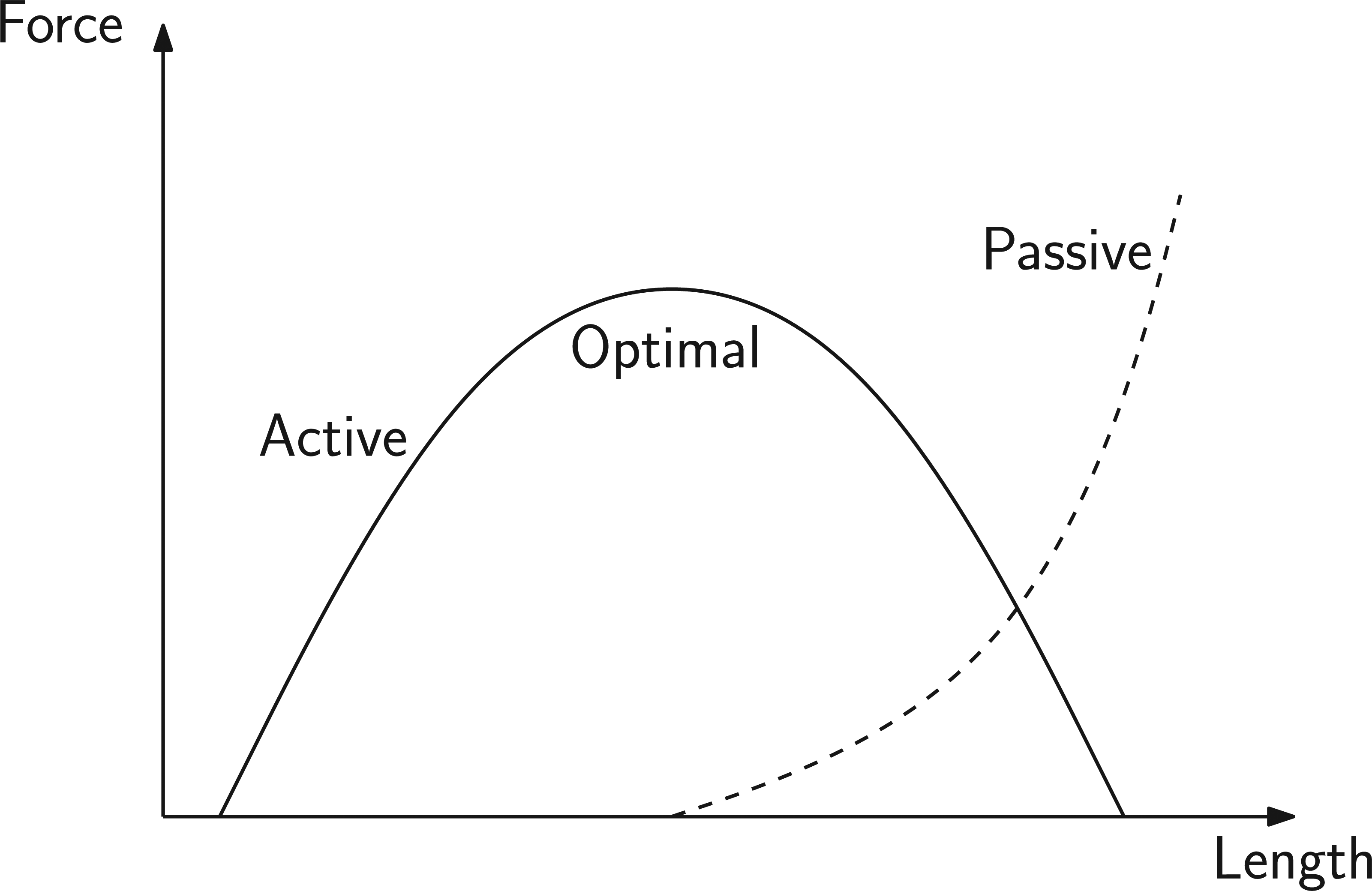
A typical force-length relation for a single muscle fiber for some fixed activation.
The data provided by equation (59) is insufficient to describe how the force is changed if an additional stretch is imposed on the fiber for non-vanishing activation. Additional data of this type may be found in works which focus on ‘force produced after stretch’ as in [19, 20]. Such experiments measure the force in the form of

where λ is the additional stretch and λ0 is the initial stretch prior to the activation α0. Roughly, the force tends to follow approximately a straight line with a positive slope. Our ‘three-stage model’ described in Section 4.3 uses such a loading scenario.
4.2. Linearization of the constitutive model for small superimposed deformations
As a background and for the introduction of the notation, we include a short review of the relevant kinematics and analysis of stress for the general case of infinitesimal deformations superimposed upon a finite deformation.
We consider a configuration κ0 relative to the reference configuration and we refer to it as the intermediate configuration. The notation
Let

Here,
The linearized relation between the Cauchy and the second Piola–Kirchhoff stresses is

If the body is incompressible tr(δ

4.3. The three-stage model
Consider now a three-dimensional continuous body, possibly incompressible, which consists of a mixture of N bundles of muscle fibers. In accordance with the foregoing scheme of notation, variables corresponding to the intermediate configuration are indicated by a zero subscript. The fiber density vector at the reference configuration will be denoted by
In order to describe the state of stress in a muscular hydrostat, we use the constitutive relations as in Section 4.1 according to our earlier assumptions concerning a general mixture of fiber bundles as in Section 3.3. Focusing on the role of the fibers alone, and in order to illustrate some of the principles which make it possible for such organs to function, we neglect here the intramuscular resistance of the connective tissues. Since experimental data is available mostly for the isometric activation and for the extension under constant activation, we conceive the following three-stage model loading scenario.
First, we consider κ0 as a deformation of the organ, in the absence of activation and with negligible forces in the fibers, from some stress-free reference state to an intermediate configuration. Despite of the fact that due to the passive deformation of the fibers stresses may exist, our model neglects this passive part.
Next, in this passively deformed intermediate unloaded configuration κ0, the muscle fibers are activated isometrically. We denote the active isometric tension in the fibers as

where p0 is the hydrostatic pressure in the intermediate configuration.
Finally, from this activated intermediate state, with fixed activation levels

where p is the hydrostatic pressure in the current configuration.
4.4. Linearization of the constitutive relation for the case of muscle fibers
Recalling that the second Piola–Kirchhoff stress obtained in (56) is

the process of linearization is further simplified and one arrives at

Using the linearized transformation (63), we obtain

Introducing the infinitesimal strain tensor

where

and

Here,

The fact that the body is prestressed due to activation causes geometric contributions to the stiffness in addition to the elastic terms. In order to distinguish them from the elastic stiffness, a material property, these stiffness terms are usually referred to as the geometric stiffness.
In the special case where

As a very simple example, let
It is observed that the geometric stiffness together with incompressibility, enables the muscle fibers to resist both tension and compression, increasing the stiffness along the directions of the fibers. The fibers can also support shear due to the change in the direction of the deformed fibers. In spite of the simple geometry and a small amount of muscle groups which cannot span the space of symmetric stress tensors alone in the intermediate configuration, the prestress in the three mutually orthogonal fiber groups allows the muscular hydrostat to support any stress field undergoing some deformation.
5. The stress analysis problem
In this section, we summarize the equations for the analysis of stress pertaining to our model of the mechanics of the octopus’s arm. The resulting equations specialize the general equations of stress analysis, and in particular, we consider the three-stage scenario and the stress tensor is given in terms of the values of the tension in the incompressible mixture of five fiber bundles.
5.1. The equilibrium conditions
The Cauchy stress at the current configuration according to (50) and (65) may be represented as

where we should use the constitutive relation

Here, the operators div and grad denote the divergence and gradient computed relative to the current configuration. It is observed that the second term in the square brackets is related to the curvature of the fibers. The absence of sources and sinks, as in (37), implies that the last term in the square brackets vanishes identically for all n. The first term in (76) contains the directional derivative,
We conclude that (76) assumes the form

and it is expected that curvature of the fibers will be accompanied by pressure variation.
The boundary condition for the stress,

where we keep in mind that the conditions Tn > 0 and p > 0.
The corresponding conditions for the intermediate configurations are obtained by replacing the various variables with their analogs, e.g.
5.2. The stress analysis problems for the three-stage model
The isometric activation stage. Following the unloaded activation stage, the arm is at some given intermediate state given by κ0, and the Cauchy stress is presented as in (55). The configuration κ0 determines the displacement vector
The unknown fields are therefore the five values of the tension
Thus, two additional conditions are required to solve the problem. These conditions may be thought of as the degrees of freedom the octopus has in activating the muscles. For example, while it might be possible to produce the pressure in the intermediate configuration by activating only three muscle groups, the activation of additional groups may result in additional stability and rigidity of the arms for applied loadings.
The final loading stage. We now consider the third and final stage: the response to an external loading under fixed activation of the fibers. The final linearized Cauchy stress, following from the superimposed infinitesimal deformation δ
We have the following independent equations: three equilibrium equations, five constitutive relations (65) for passive deformation of the fibers under constant activation, the incompressibility condition eii = 1 and nine relations for the infinitesimal strain in terms of the displacements.
Footnotes
Acknowledgements
We would like to express our gratitude to W Herzog, M Epstein, SS Blemker and L Dorfmann for their help with the constitutive model of the arm and to M Epstein for his advice with the bases for the space of tensors.
This article is dedicated by the authors to Marcelo Epstein, on the occasion of his 70th birthday. Reuven Segev wishes to express his deep gratitude for the inspiration, mentoring, and friendship over a period of more than 35 years.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work was supported by the Perlstone Center for Aeronautical Engineering Studies and the H Greenhill Chair for Theoretical and Applied Mechanics at Ben-Gurion University.