
Abstract
In structural health monitoring, guided wave-based techniques are highly sensitive to environmental temperature, leading to spurious signal variations that obscure damage features and compromise localization accuracy. This article introduces a robust unsupervised and few-shot temperature compensation framework that achieves accurate signal reconstruction and reliable damage localization under diverse thermal conditions. The proposed approach requires only a limited number of baseline measurements, and avoids reliance on labeled damage data. First, a rolling pairing scheme is developed to expand training diversity from small datasets, enabling the model to learn cross-temperature relationships in an unsupervised manner. Second, four temperature-embedding operators are formulated to explicitly incorporate thermal information into the latent space. Finally, a channel-weighting mechanism adaptively emphasizes statistically reliable sensing paths while suppressing unstable ones. The framework is tested on a 9.2-m carbon steel pipe, achieving accurate signal reconstruction and stable damage localization under different temperatures and noise levels.
Keywords
Introduction
Pipelines are essential for transporting fluids in various industrial sectors, such as oil, gas, chemical processing, and power generation. 1 These structures often operate under complex loads and changing environmental conditions, which can cause corrosion, 2 fatigue cracking, 3 delamination, 4 and weld defects. 5 Early detection and accurate localization of such damage are critical to reduce maintenance costs and prevent unplanned downtime. Among the available structural health monitoring (SHM) methods, ultrasonic-guided wave (UGW) techniques have attracted significant attention. They allow long-range inspection using a small number of transducers,6,7 respond to various defect types, and work well with low-cost piezoelectric sensor networks. In these systems, elastic waves are generated and received by piezoelectric elements. Structural damage causes scattering, mode conversion, or attenuation, which appears as changes in the recorded signals. In damage detection, the current signal can be subtracted from the baseline signal under normal conditions, which help to reveal the characteristics induced by the damage.8,9
However, environmental and operational conditions (EOCs) can also affect guided wave signals. These effects may resemble or hide the presence of damage, leading to false positives or missed detections,10,11 internal fluid dynamics, 12 surface coatings,13,14 mechanical loading, 15 and temperature variations 10 are major EOC sources. Among them, temperature is often the most critical factor. It changes the geometry and material properties of pipelines and alters wave propagation characteristics. These temperature-induced changes can simulate damage, causing localization errors. Wang et al. investigated corrosion damage localization and quantification in pipelines while considering environmental influences, 16 demonstrating that environmental variations can significantly affect guided wave propagation characteristics and damage evaluation accuracy. Therefore, temperature compensation has become a key challenge in UGW-based SHM.
Fortunately, database-driven compensation offers an effective way to address temperature-induced variations in guided wave signals.10,17 A typical approach is optimal baseline selection (OBS), which stores signals at different temperatures and selects the best match during inspection. Lu et al. 8 showed this improves damage detection in aluminum panels. However, the discrete nature of OBS limits its ability to handle continuous temperature changes. To overcome this, the optimal signal stretch (OSS) method was introduced,8,18,19 which adjusts the baseline waveform by stretching or compressing it to minimize residuals. While more flexible, OSS still requires dense sampling. To reduce storage demands, baseline clustering was proposed, 20 aiming to shrink the database without sacrificing accuracy. Despite these advances, these methods still rely on multiple temperature-specific samples and suffer under environmental drift. Recent studies have also investigated guided wave scattering mechanisms using advanced numerical frameworks. For example, Lozano et al. 21 proposed a scaled boundary finite element framework for guided wave modal scattering analysis, enabling accurate simulation of defect interactions and scattering characteristics in complex structural configurations.
Consequently, model-based methods were developed to reduce the reliance on a large number of benchmark libraries. Finite element simulations have been used to evaluate temperature-dependent elastic properties and the resulting shifts in
Recent advances in deep learning have created new opportunities for signal-based SHM. Neural networks can learn complex nonlinear relationships directly from raw measurements, enabling robust performance under environmental and operational variability. They have been applied to damage classification, 25 fatigue assessment, 3 damage identification, 26 and noise suppression. 27 In guided wave SHM, convolutional neural networks (CNNs) remain dominant. When trained on labeled datasets covering both healthy and damaged states, CNNs can achieve accurate detection and localization under temperature variations. For example, combining singular value decomposition with one-dimensional CNNs improves detection in complex environments, 28 while training CNNs across multiple damage states and temperatures, combined with Gaussian mixture models, yields reliable localization. 29 Nevertheless, such fully supervised methods demand large, well-labeled datasets, which are costly and time-consuming to obtain.
To reduce reliance on labeled data, reconstruction-based methods using autoencoders (AEs) have been investigated. AEs learn compact latent representations of guided wave signals without explicit damage labels, enabling separation of environmental and damage effects. In temperature compensation, this allows signals to be reconstructed as if measured under reference conditions. Several AE-based strategies have been proposed: temperature scaling has been used to model the relationship between temperature and signal features,
30
continuous wavelet transforms combined with convolutional denoising AEs reconstruct reference-temperature signals,
31
and reconstruction- or dimensionality-reduction-based AEs learn compact representations for signal restoration.32,33 Despite avoiding labeled data, these methods typically require large numbers of unlabeled samples and remain data-inefficient, since conventional AE training follows a one-to-one reconstruction paradigm with efficiency limited to
However, in practical monitoring systems, temperature sensors are typically installed in close proximity to the transducers and can only provide real-time measurements of the local temperature at the sensor location. Due to structural complexity, the temperature distribution along the pipeline is often unknown and may vary significantly under environmental influences. This spatial nonuniformity further increases the difficulty of temperature compensation and limits the effectiveness of conventional methods that rely on single-point temperature measurements.
To address these issues, this article proposes a novel temperature compensation framework, specifically designed for practical monitoring scenarios where the temperature distribution and material parameters cannot be accurately measured. The proposed model is trained exclusively on healthy-state signals and learns the underlying transformations between signals under different environmental conditions, without requiring annotations such as damage location, size, or type. It enables unsupervised training with small datasets, expanding data efficiency from
(1) A novel rolling training paradigm expands the dataset from
(2) Four temperature-embedding modes are proposed to include temperature information, and the optimal design is selected through experiments;
(3) A channel-level weighting strategy is combined to emphasize reliable sensing paths.
The remainder of this article is organized as follows: the second section presents the methodology, including the network structure, training strategy, and localization algorithm. The third section describes the experiment, including system, dataset, and reports hyperparameter optimization experimental results and comparative studies. Finally, the last section concludes the article and outlines future research directions.
Methodology
This section presents the proposed framework for temperature-compensated signal reconstruction and damage localization in UGWs. The methodology consists of three main components: (1) a rolling training scheme that maximizes the utilization of available temperature-diverse data, (2) a temperature-embedded AE model that enables adaptive reconstruction across thermal states, and (3) a channel weighting strategy that enhances robustness against variability in sensing paths. A schematic overview is provided in Figure 1.
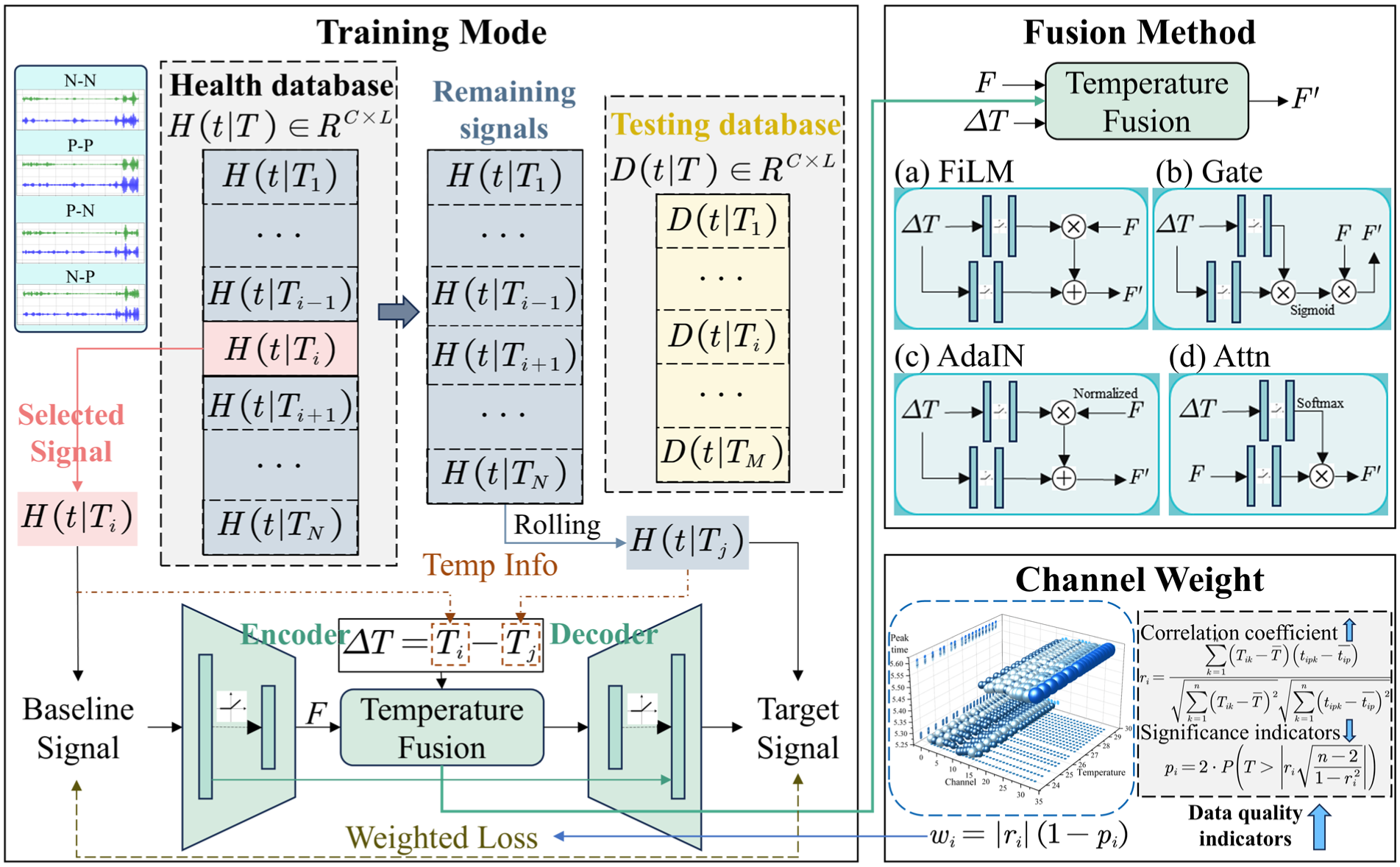
An overall schematic of the proposed methodology.
Rolling training scheme
Let the healthy signal database be denoted as follows:

where
In conventional AE training, each sample is reconstructed individually, resulting in

where

which significantly improves data utilization from
The reconstruction objective is then formulated as a conditional mapping problem:

where
Similarly, when the structure is damaged, the same mapping applies:

where
This assumption is supported by the underlying physical mechanism of temperature influence on guided wave propagation. Temperature variations primarily affect material properties, which in turn influence wave velocity, phase, and attenuation. Both the propagating waves and the damage-scattered waves travel within the same medium and are governed by the same temperature-dependent material behavior. Therefore, the temperature dependence of the scattered component is consistent with that of the propagating component, providing a physical basis for extending the learned temperature transformation from healthy signals to damaged signals.
Temperature-embedded AE
A standard AE projects an input signal into a latent feature space and reconstructs it through a decoder. However, to account for temperature variability, we introduce a conditional residual formulation. The temperature-induced residual is defined in a residual subspace

where
Accordingly, the reconstructed signal is expressed as follows:

where

The training objective is then formulated as a risk minimization problem:
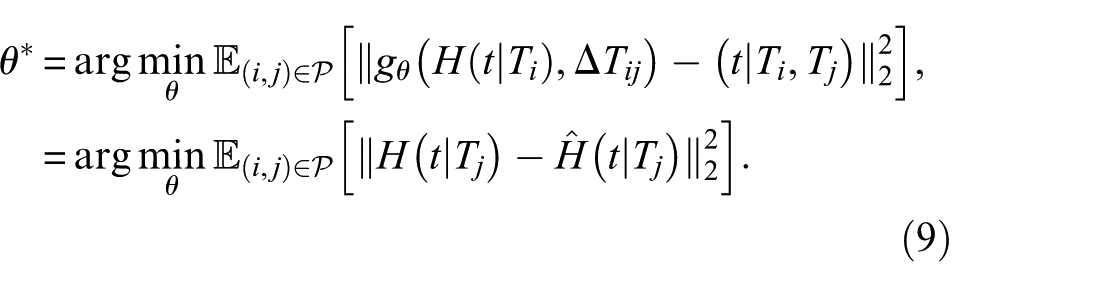
where
To embed temperature information into the latent representation, four fusion strategies are investigated: (1) feature-wise linear modulation (FiLM), (2) gate-based fusion, (3) adaptive instance normalization (AdaIN), and (4) Attention-based Fusion (Attn). Each method modulates the encoded features with respect to
Embedding mode
To explicitly embed temperature dependency into the latent feature space, we consider four distinct operator families. Each method introduces a conditional transformation

where
From a general machine learning perspective, this embedding process can be interpreted as a feature fusion operation, where temperature differences as auxiliary variables are mapped into the latent space and integrated with the primary signal features. Representative studies have demonstrated that feature fusion mechanisms can effectively enhance model performance across different tasks, such as multidimensional feature integration, 34 local–global feature aggregation, 35 and fusion-aware transformer architectures. 36
This motivates the use of embedding-based feature fusion to model temperature-dependent transformations in the latent space.
Featurewise linear modulation
FiLM performs an affine transformation parameterized by

where
Gate-based fusion
A gating operator

where
Adaptive instance normalization
AdaIN aligns first- and second-order statistics of the latent features with temperature-dependent parameters:

where
Attention-based fusion
Finally, an attention operator allocates channel-specific importance based on

where
Channel weighting strategy
To evaluate the statistical dependence between the end-face echo time-of-flight (ToF)
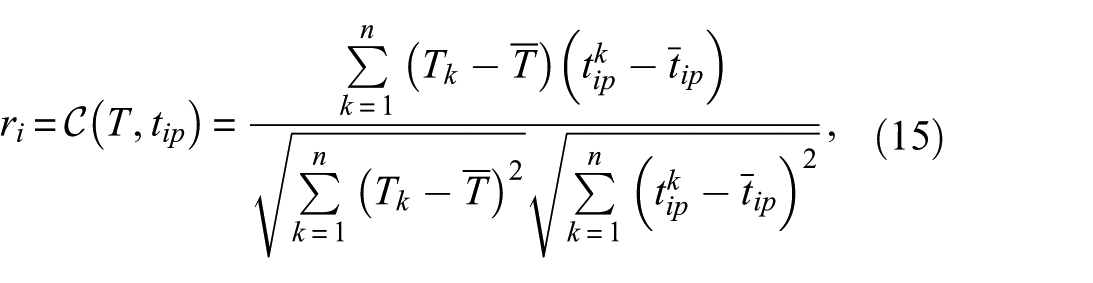
where
The statistical significance of

Finally, channel weights are obtained by normalized aggregation:

where
Damage localization
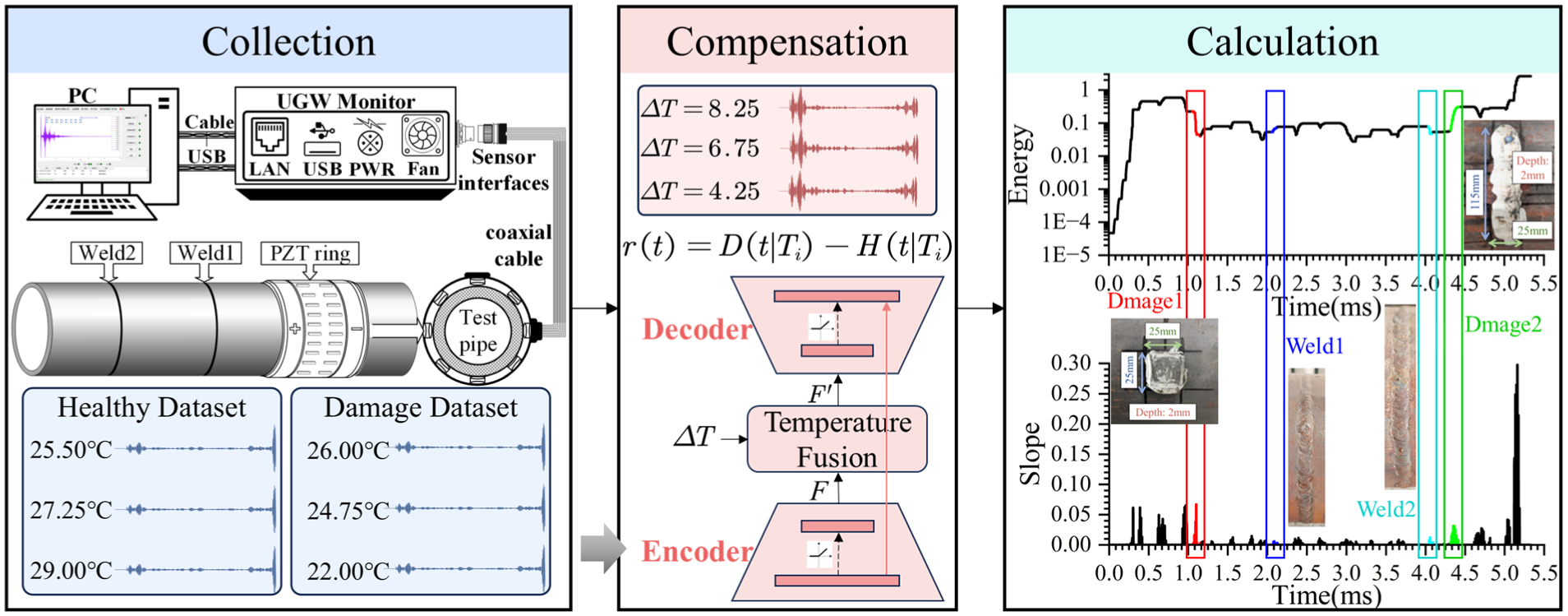
After signal reconstruction, damage localization is performed through a residual-based strategy. Specifically, the compensated damage signal

where
To enhance the saliency of scattered wave packets, we define a moving-window energy functional:

which emphasizes transient peaks over background fluctuations.
Subsequently, the energy gradient is evaluated to capture abrupt changes:

with
The location of the maximum slope,

provides the estimated ToF of damage-induced scattering. Mapping

Experiment
Data acquisition
The experimental system for UGW monitoring is shown in the first part of Figure 2. It consists of a customized test pipe, a Piezoelectric lead zirconate titanate (PZT) ring, a UGW monitoring instrument, and a host PC.
A damage localization strategy.
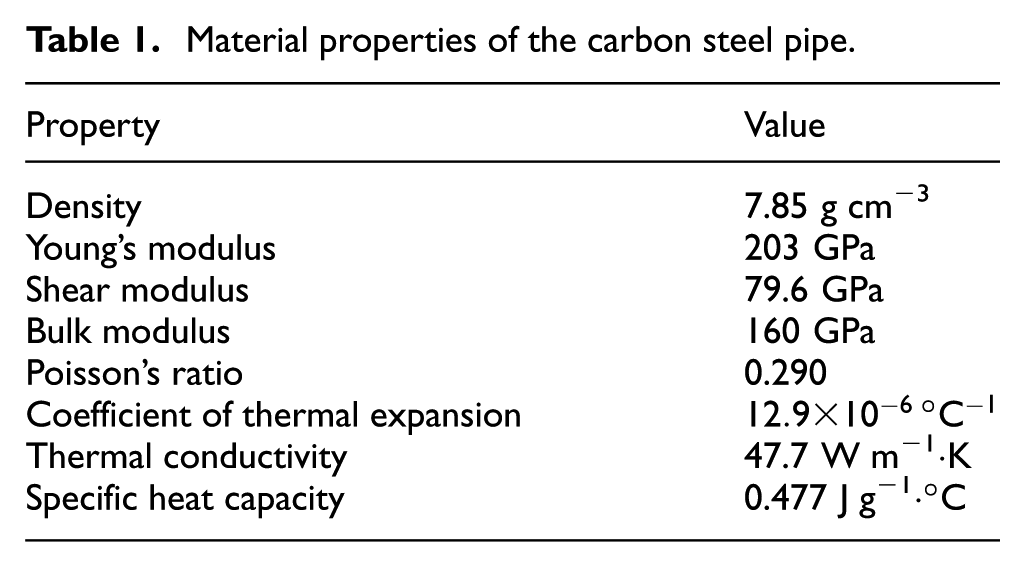
The test specimen is a 9.2-m-long carbon steel pipe with a nominal size of NPS 6 and Schedule 40, corresponding to an outer diameter of 168.28 mm and a wall thickness of 7.11 mm. The parameters of the pipe material are shown in Table 1. Guided wave excitation and sensing are performed using a dual-ring piezoelectric transducer configuration, where each ring contains eight evenly distributed elements. The ring serves for both excitation and reception, and its axial position is defined as the origin 0 m. The transducer rings are prefabricated integrated units with a unified interface, facilitating installation and ensuring consistent performance. They are mounted on the pipe surface using a mechanical clamping fixture to provide stable coupling. Two artificial welds are positioned at 3.7 and 6.9 m from the origin.
Material properties of the carbon steel pipe.
The UGW monitor serves as the excitation and acquisition unit, connected to the PZT ring and controlled via a PC. The system supports Gigabit Ethernet communication and is powered by a regulated DC supply modeled UTP3705S. A dedicated upper-computer software installed on the PC enables signal generation, real-time monitoring, and data processing.
Recent studies have also investigated guided wave propagation and scattering mechanisms in pipe structures through theoretical modeling, 37 demonstrated the effectiveness of dispersion-based mode and frequency selection for pipe inspection. In this experiment, signals were sampled at a frequency of 3 MHz. The excitation signal defined in Equation (23), consisted of an eight-cycle sinusoidal wave modulated by a Hanning window, with a central frequency of 40 kHz. The corresponding time-domain and frequency-domain representations of the signal are depicted in Figure 3, providing a comprehensive visualization of its characteristics:

where
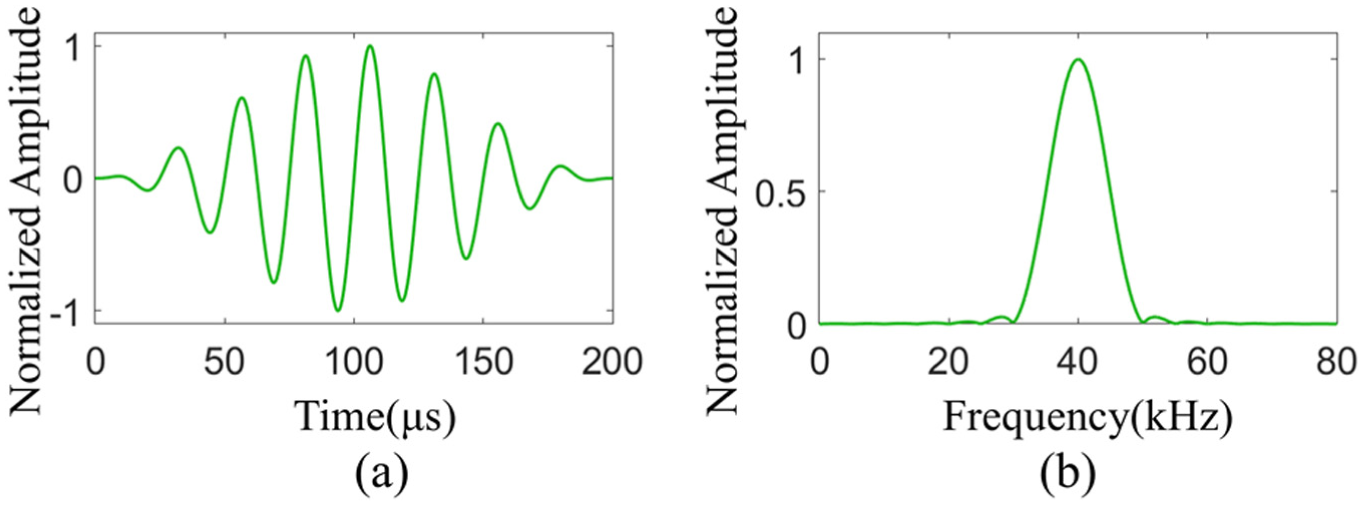
Excitation signal: (a) time domain and (b) frequency domain.
In addition, the moving-window width used in the energy-based analysis is set to
Dataset construction
To evaluate the performance of the proposed temperature compensation and damage localization methods under realistic SHM conditions, a dataset was constructed using the carbon steel pipe. The dataset includes guided wave signals acquired under three structural states:
Healthy: The intact pipe without any artificial defects.
Single damage (SD): A single machined notch of 80
Double damage (DD): The SD case plus an additional notch of 25
The entire experiment was conducted in a corridor near a window, without active temperature control. As a result, natural temperature variations occurred during signal acquisition. This setup allows the collected data set to reflect real environmental fluctuations and helps to validate the effectiveness of the temperature compensation method in a noncirculating environment.
For each structural condition, guided wave signals were repeatedly acquired over a period of time. After removing invalid samples based on “Channel weighting strategy” section, the remaining valid signals were used to construct rolling training pairs, where each sample was paired with all others in the same condition. The resulting dataset composition for each structural state is summarized in Table 2. It is worth noting that the traditional few-shot approach only has a lower number of data samples. Here, the aim is to emphasize the effect of the rolling framework on expanding the volume of data.
Dataset volume summary.
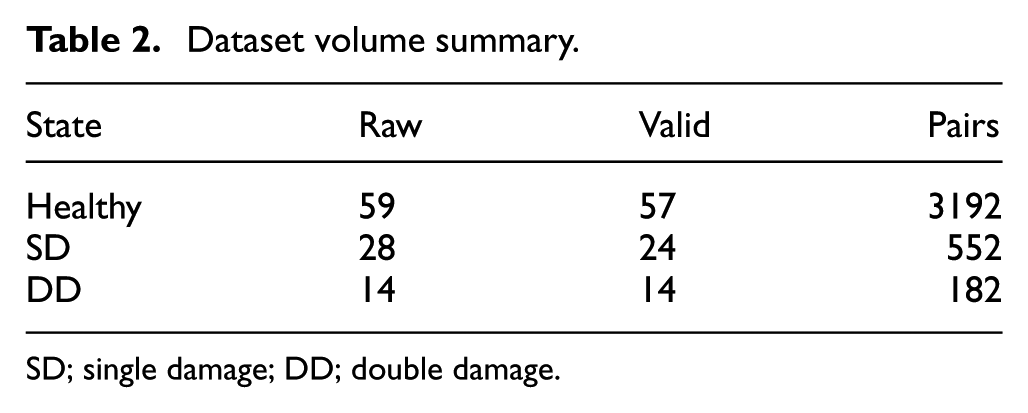
SD; single damage; DD; double damage.
Here, the guided wave signal propagating in opposite directions was separated along the pipeline through the delay superposition and signal pairing of N-ring and P-ring excitation, which allows for independent observation of the pipe wave packets on both sides of the sensor. Figure 4 illustrates the separated bidirectional-guided wave signals under the health condition at a temperature of 29.5°C.
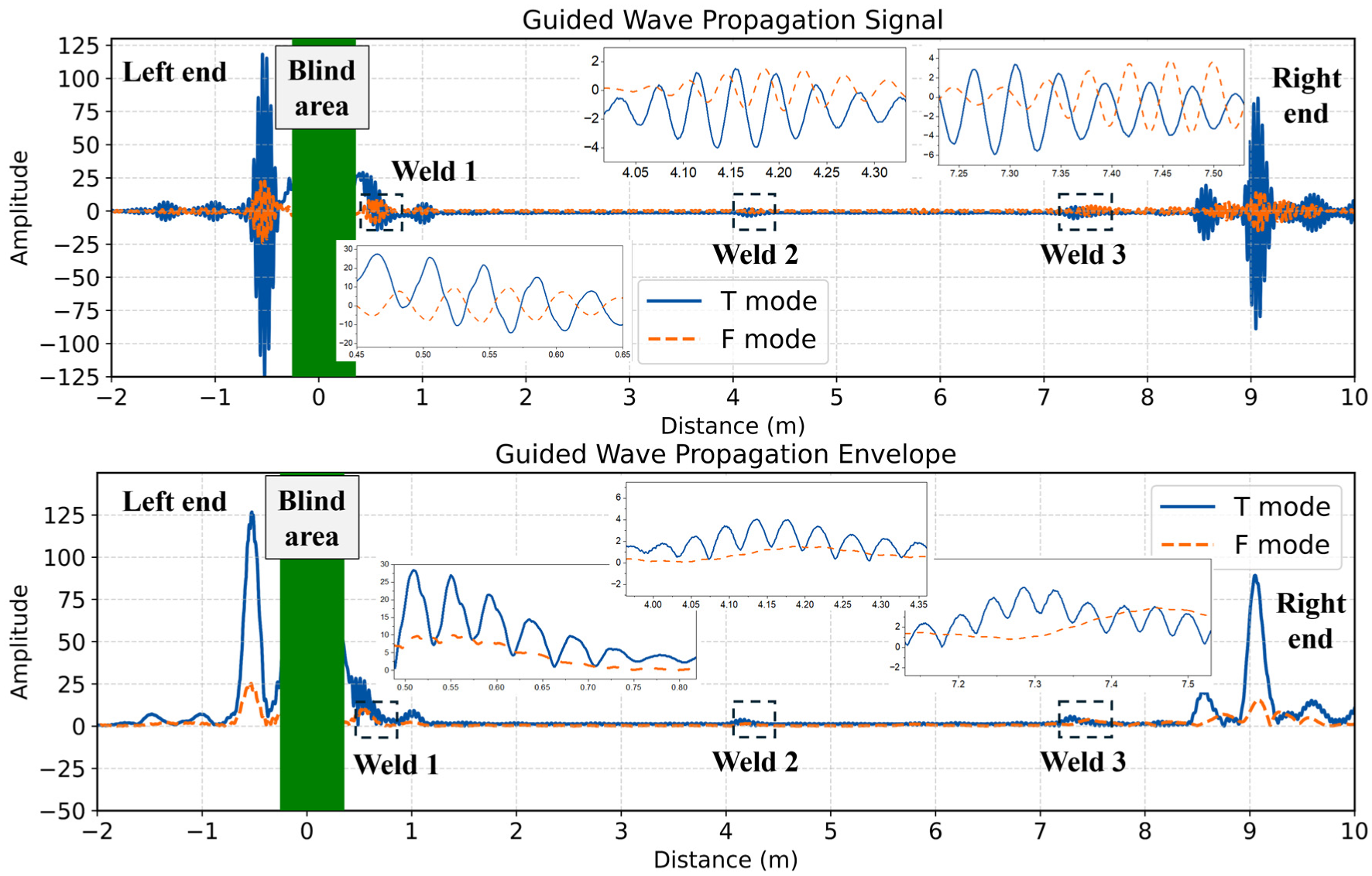
Separated bidirectional-guided wave signals.
In this study, only healthy-state signals are used for training, while all damaged-state signals are reserved exclusively for testing. Therefore, the model is never exposed to damage-related waveforms during training.
Within the training set, signal pairs are constructed using a rolling pairing strategy of the form
The model is trained using the Adam optimizer with a learning rate of 0.001. The batch size is set to 64, and the model is trained for 500 epochs. These settings have been added to the revised manuscript. The training configuration is summarized in Table 3.
Training settings of the proposed model.
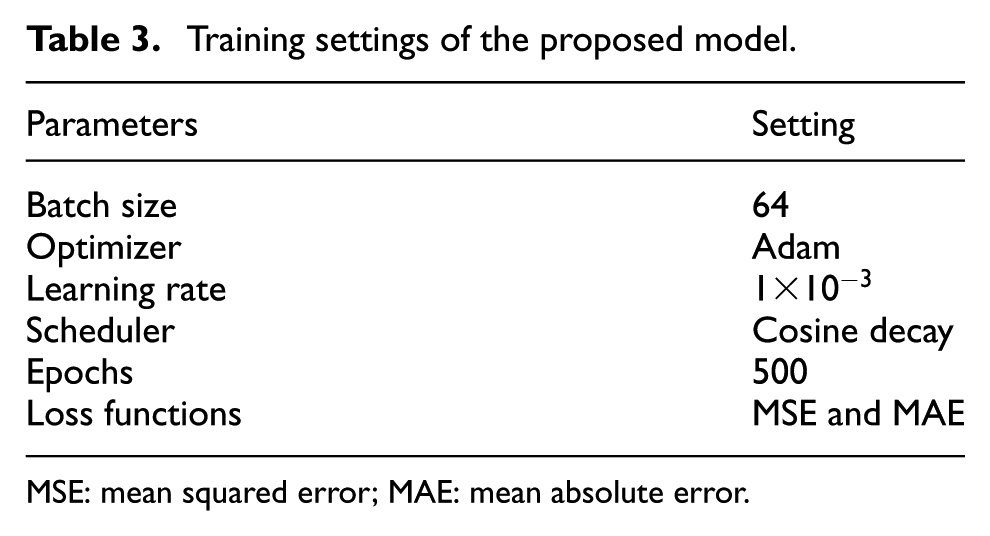
MSE: mean squared error; MAE: mean absolute error.
Hyperparameter optimization
To avoid cumbersome training, only three sets of monitoring data are used for each structural state, generating 3
All ablation experiments are based on a consistent AE architecture, which is used to evaluate the training effect of different temperature fusion methods, learning rate patterns, channel weights, and rolling mode. Each training is done for 500 epoch, and its performance is evaluated using a composite loss function defined by Equation (24):

where the mean squared error (MSE) penalizes large deviations and the mean absolute error (MAE) captures overall prediction consistency, this combined loss provides a more comprehensive measurement of compensation performance.
To systematically evaluate the contribution of each component in the proposed temperature-compensated signal reconstruction model, we conduct a series of ablation studies under SD state. Each experiment isolates a specific design choice under controlled settings, with performance assessed by the combined MSE + MAE loss after 500 training epochs.
We first compare the performance of the four temperature embedding strategies proposed in “Temperature-embedded autoencoder” section. All models are trained under consistent conditions: rolling training mode, cosine annealing learning rate, and with channel weighting enabled. The loss results for each method are summarized in Table 4, demonstrating that FiLM achieves the best reconstruction performance across all cases. This result suggests repeated feature extraction and mapping directly to
Experimental results of different fusion methods.

FiLM: featurewise linear modulation; AdaIN: adaptive instance normalization; Attn: Attention-based Fusion.
Next, we examine the impact of different learning rate strategies, including a constant learning rate, cosine annealing, and linear decay, as shown in Figure 5. All experiments are conducted using FiLM method, rolling training, and channel weighting. As shown in Table 5, the cosine annealing strategy achieves the lowest final loss, indicating improved convergence behavior and generalization ability. This dynamic scheduler allows the model to escape shallow local minima while maintaining learning stability.
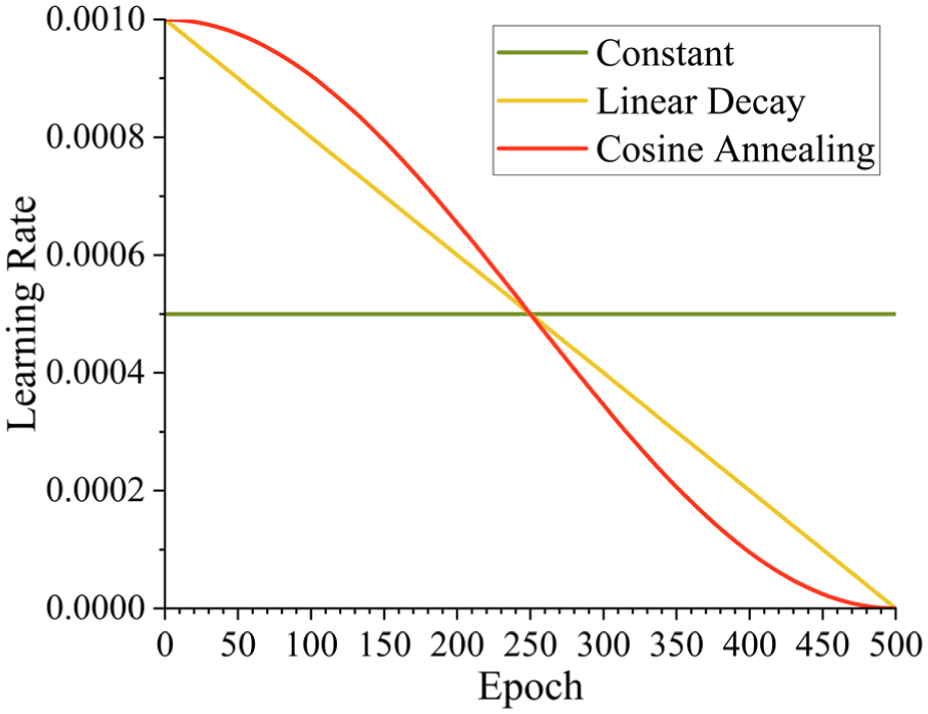
Different learning rates.
Experimental results of different learning rates.

To evaluate the effectiveness of the proposed mechanisms, we perform ablation studies on both the channel weighting strategy (“Channel weighting strategy” section) and the rolling training scheme (“Rolling training scheme” section). The experimental settings are kept consistent (FiLM method with cosine annealing), and the results are summarized in Table 6.
Experimental results of channel weighting and rolling mode.

For the channel weighting mechanism, the model trained with adaptive weights achieves consistently lower training and testing loss compared to the baseline, confirming that weighting enhances the emphasis on reliable channels while suppressing unstable ones. For the rolling mode, the results further demonstrate its superiority: training with rolling pairs yields not only a reduced reconstruction loss but also a lower testing error than training error, highlighting its role in improving generalization through diverse input–output combinations.
To evaluate the sensitivity of the proposed method to the moving-window width
As shown in Table 7, the localization performance remains relatively stable within a moderate range of window sizes. When
Ablation study on the moving-window width

SD: single damage; DD: double damage.
Signal reconstruction performance
To evaluate the temperature compensation capability of the proposed method, we first analyze the distribution of ambient temperatures under different structural states during data acquisition. Since all experiments were conducted in an uncontrolled environment, no artificial regulation was applied. As a result, the temperature distributions are naturally nonuniform, as illustrated in Figure 6. The guided wave signals were collected between July and October, during which the ambient temperature exhibited a gradual downward trend. Measurements were recorded with a resolution of 0.25°C, which corresponds to the minimum detection interval of the temperature sensor used in the experiment. Data points are derived from the rolling pairs described in Table 2.
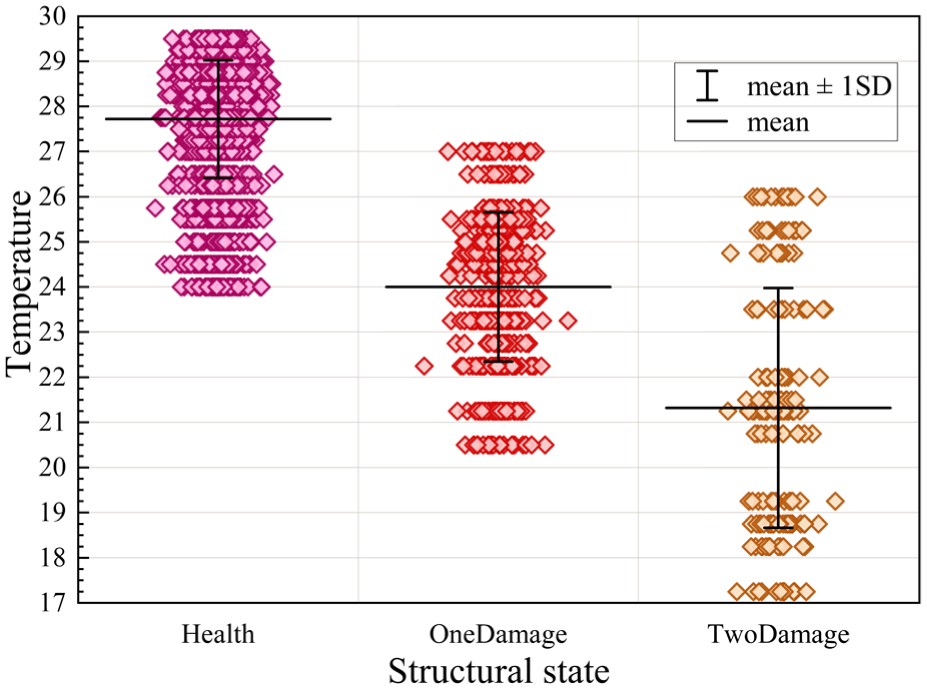
Temperature distribution under different structural states.
In the healthy state, the temperature measurements are highly concentrated, with a mean of
The objective of proposed model is to reconstruct guided wave signals at a target temperature based on measurements acquired under an arbitrary current environment. Only signals from the healthy structural state are used for training, all damaged cases remain entirely unseen during the learning process. It ensures that the model generalizes to damaged conditions without prior exposure. Figure 7 presents representative reconstruction results for the T(0,1) mode under two structural conditions: (a) SD and (b) DD. To emphasize the model’s robustness under challenging conditions, we deliberately select input target pairs with the largest observed temperature differences. To aid visual interpretation, several key regions of the signal are locally magnified in the figure, including the locations of the two welds and the artificial damage. These regions are critical for damage localization, as they often exhibit characteristic scattering features that indicate structural discontinuities or anomalies.
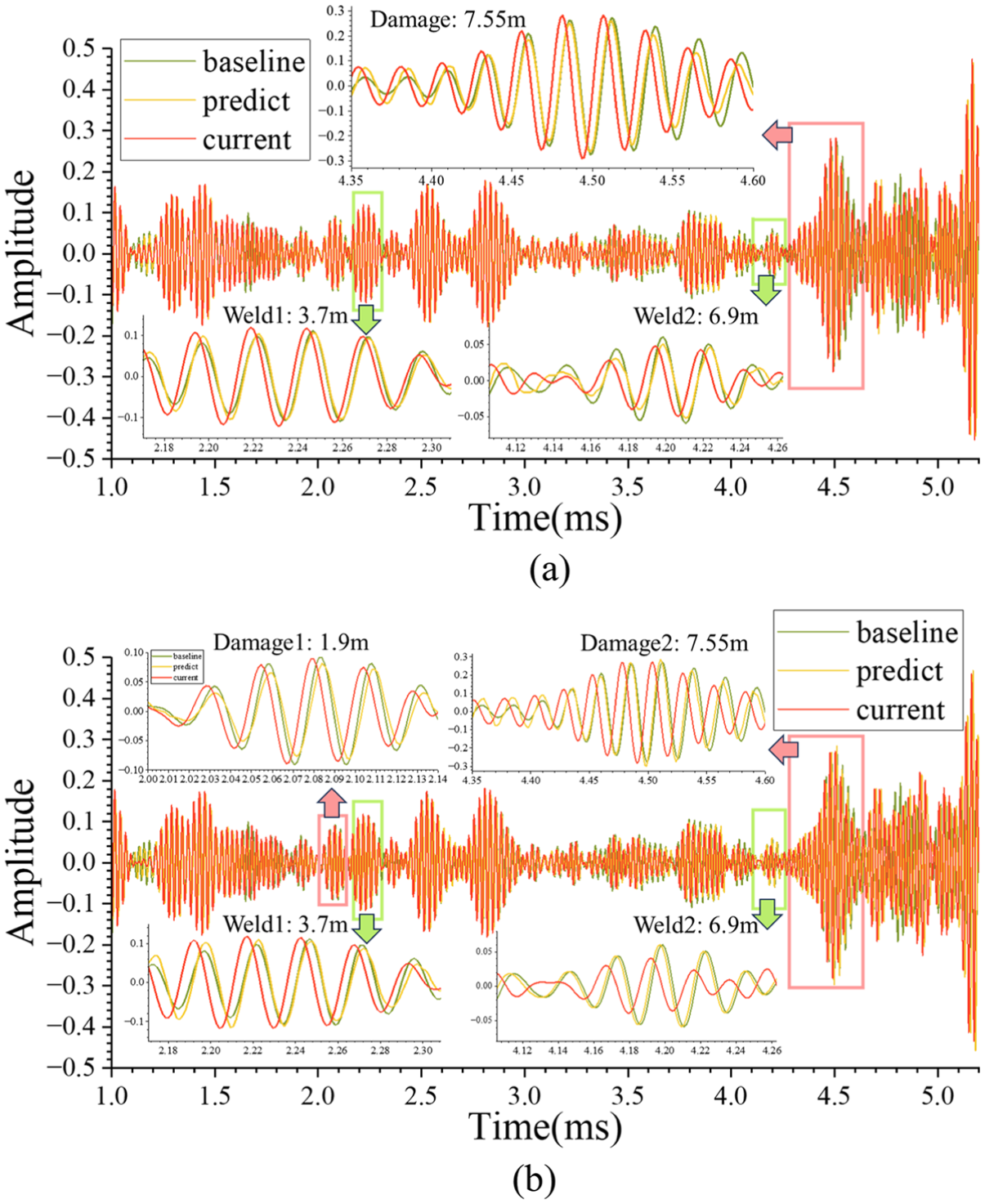
Demonstration of signal reconstruction: (a) signal reconstruction under SD state and (b) signal reconstruction under DD state. SD; single damage; DD; double damage
In the SD case, the green waveform represents the baseline signal recorded at
Ideally, the yellow reconstructed and green baseline signals should be perfectly aligned, as they are expected to represent the same structural condition at similar temperatures. It is observed that the agreement between the reconstructed and baseline signals is most pronounced in the central region of the wave packets, where the main energy is concentrated. The reconstructed signals consistently capture the overall waveform characteristics, including arrival time, phase evolution, and amplitude distribution across multiple wave packets, demonstrating that the proposed method achieves not only ToF alignment but also full waveform reconstruction under varying temperature conditions.
The results show that the model is able to accurately reconstruct waveforms that are very close to the ground truth baseline when provided with signals at arbitrary temperatures and specified target temperatures. This validates the applicability of proposed model to the task of signal reconstruction under temperature compensation.
Experimental results
This subsection presents the results of damage localization performed on the residual signals obtained after signal reconstruction.
For a fair and meaningful evaluation, we consider only the signal pairs that meet the following criteria:
(1) The temperature difference between the current signal and the baseline signal must be greater than the temperature difference between the target signal and the baseline signal, as described by Equation (25):

where
This condition ensures that compensation effectively brings the signal closer to the baseline temperature, rather than further away.
(2) Ideally, the compensation target temperature should equal to the baseline temperature. However, due to the limitations of the dataset, that is, the lack of samples with identical temperatures, we relaxed this requirement to include only cases where the temperature mismatches were within a small tolerance, as described by Equation (26):

This threshold ensures that the compensated signal can still be meaningfully compared to the baseline for damage localization, without introducing large thermal discrepancies. Based on the filtered dataset, we apply the slope-based damage localization method described in “Damage localization” section. The localization error is computed as the absolute difference between the predicted and true damage positions, and the results are summarized in Figure 8 (Table 8)
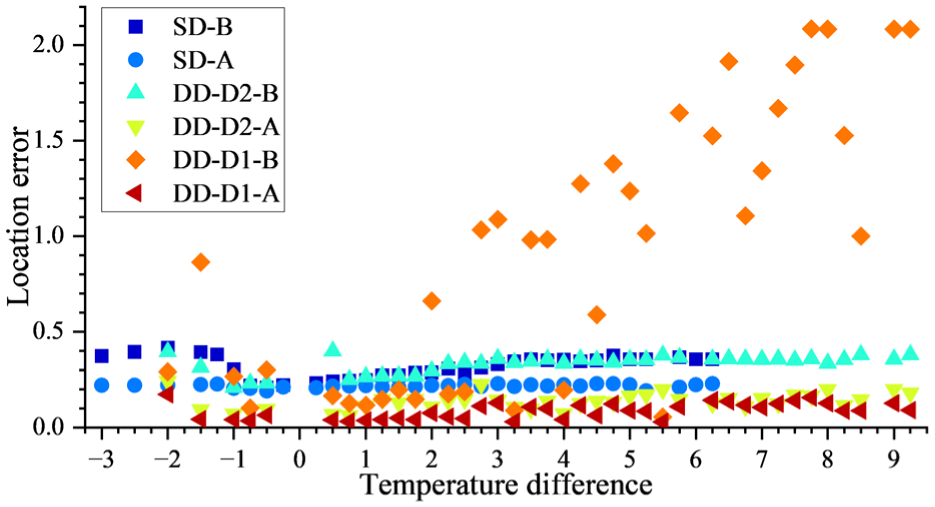
Location error under different conditions.
Legend abbreviation.
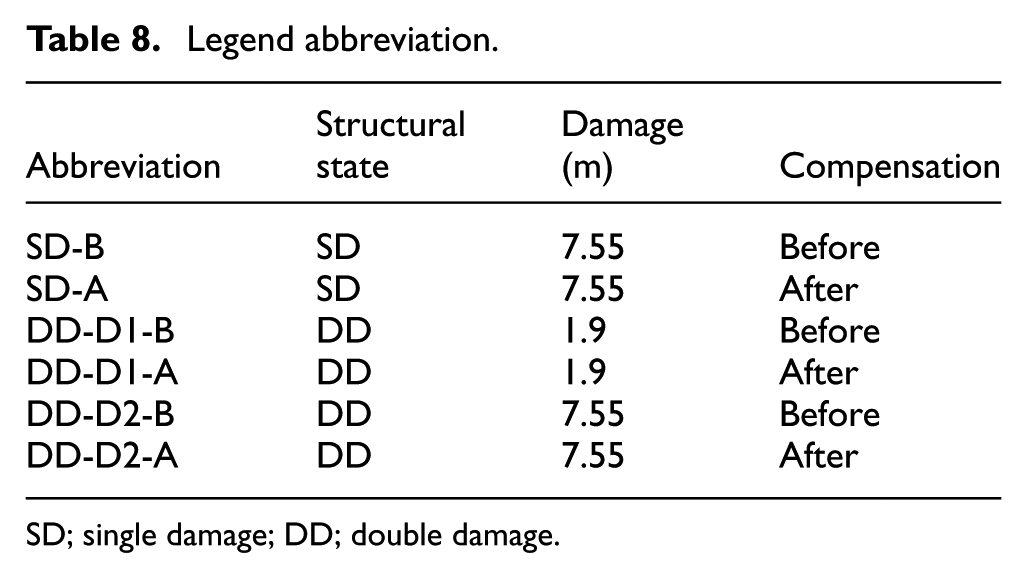
SD; single damage; DD; double damage.
With the established notation, Figure 8 presents a comprehensive comparison of localization errors versus temperature differences across all considered cases. The horizontal axis indicates the absolute temperature difference between the current signal and the baseline, while the vertical axis reports the corresponding location error in meters.
To complement the graphical analysis, a statistical summary of the localization error under each condition is provided in Table 9.
Summary of location error under different experimental conditions.
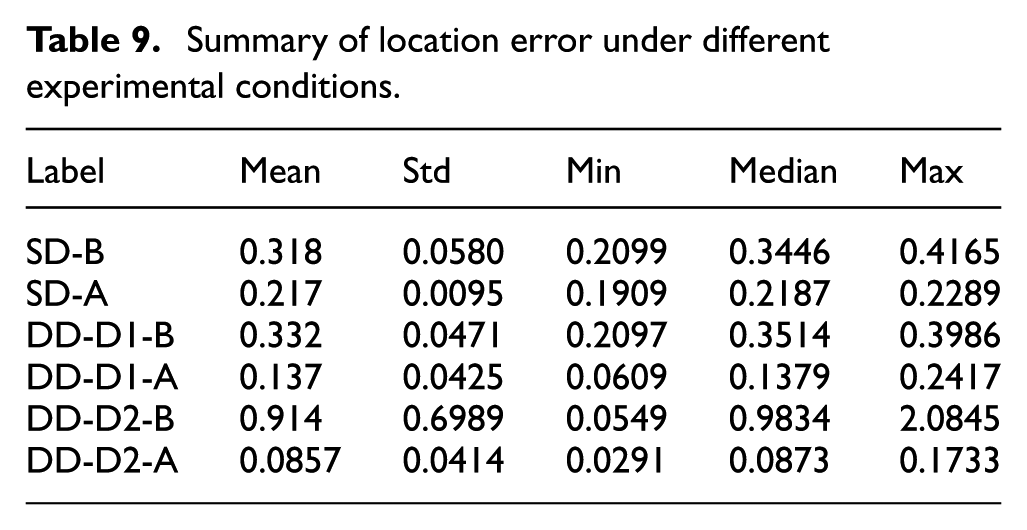
Overall, temperature compensation leads to a substantial reduction in localization error across all structural conditions. In the SD case, the mean localization error decreases from 0.318 m before compensation to 0.217 m after compensation, accompanied by a notable reduction in standard deviation from 0.0580 to 0.0095 m. This indicates not only improved accuracy but also significantly enhanced robustness and repeatability. A similar trend is observed in the DD case. For the damage located at 1.9 m (DD-D1), the mean error drops from 0.332 to 0.137 m, and the standard deviation reduces from 0.0471 to 0.0425 m. The compensation also improves central tendency, as reflected in the median values, with the DD-D1 case decreasing from 0.3514 to 0.1379 m.
The most dramatic improvement is seen at the first damage location in the DD-D2, where uncompensated localization suffers from high variance and poor reliability. The mean error before compensation reaches 0.914 m, with a maximum error of 2.0845 m. A particularly sharp escalation in error is observed when the temperature difference greater than approximately
Collectively, these results demonstrate that the proposed method achieves not only improved localization accuracy under large temperature variation but also markedly better stability and outlier resistance. Both the visualization in Figure 8 and the statistics in Table 9 validate the robustness of the proposed temperature compensation framework in practical guided wave-based damage localization scenarios.
Robustness analysis
To evaluate robustness under signal degradation, additive white Gaussian noise is injected into the guided wave signals in the DD scenario. Given a clean signal

where the noise variance

This ensures channelwise consistency by scaling noise relative to signal energy.
We test three representative SNRs (5, 8, and 10 dB), applying the full pipeline of temperature compensation, residual extraction, and slope-based localization (“Damage localization” section). Figure 9 shows error distributions for two damage sites, while Table 10 summarizes statistics. Box plots indicate mean (central line), ±1 std (box edges), and 10–90th percentiles (whiskers), with scatter points encoding temperature offsets.
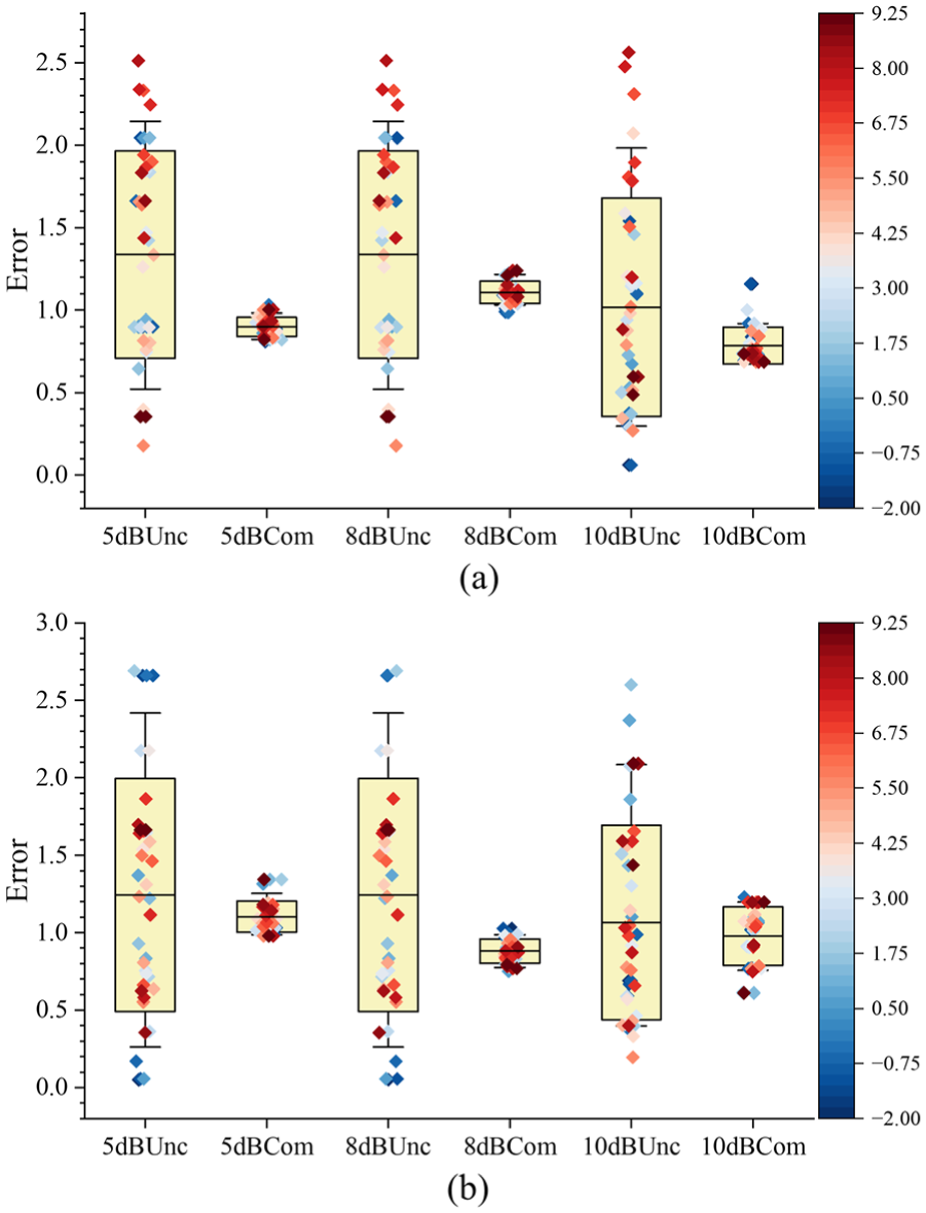
Localization error under different SNR conditions: (a) localization error under 5, 8, and 10 dB: damage 1 and (b) (a) localization error under 5, 8, and 10 dB: damage 2.
Location error under different noise levels.
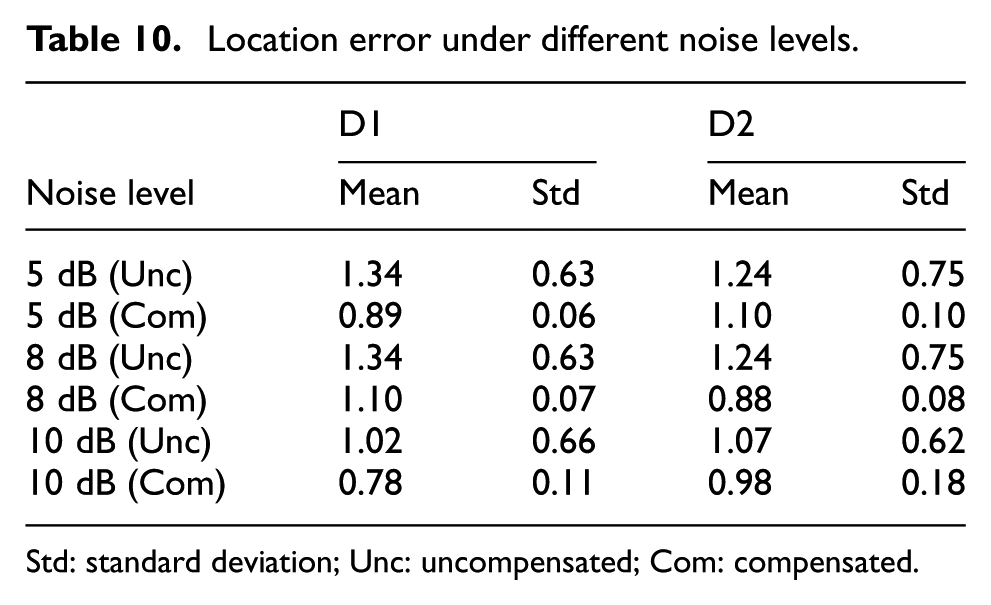
Std: standard deviation; Unc: uncompensated; Com: compensated.
Comparative evaluation
We compare the proposed unsupervised rolling framework with the widely used OBS strategy, which selects the healthy baseline that minimizes a similarity metric to the target signal. To visualize OBS behavior, we build MSE heatmaps between healthy and damaged temperature pairs (Figure 10); each cell encodes the MSE for a given (healthy temp, damaged temp) pair.
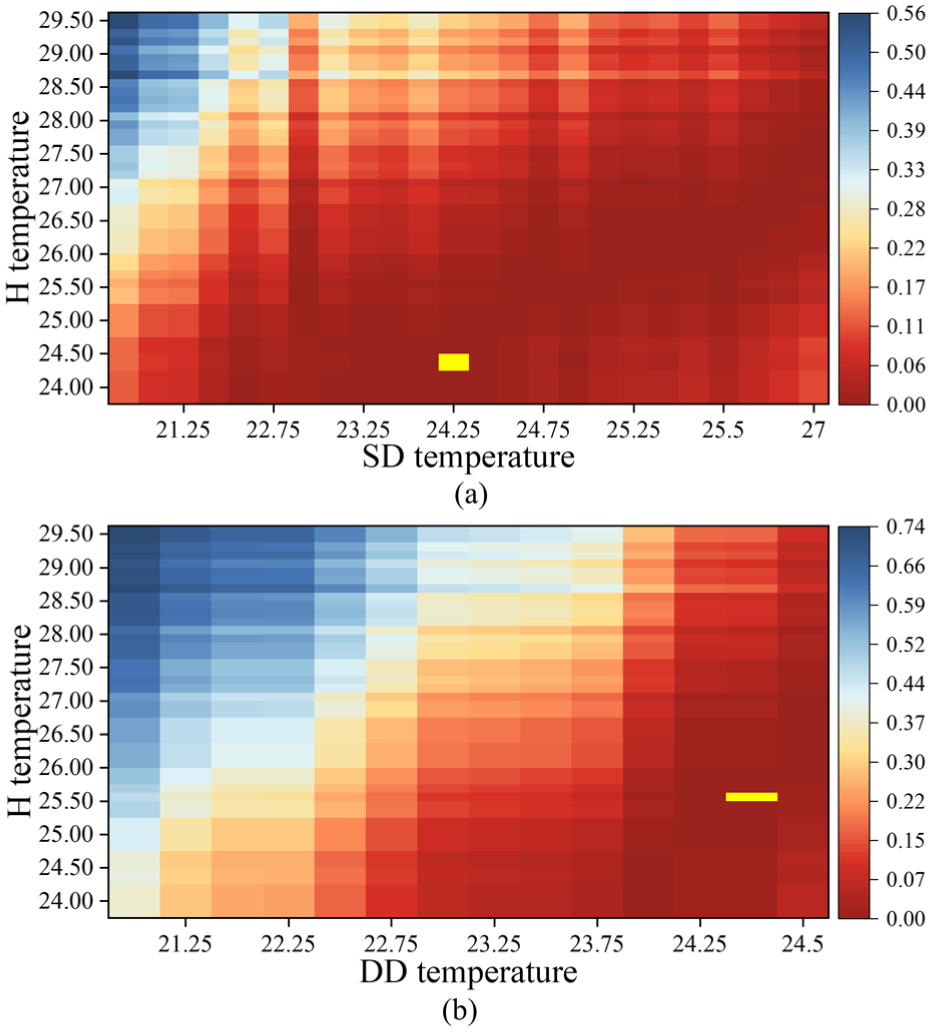
MSE distribution across healthy-damage temperature pairs using OBS: (a) MSE distribution under temperature of H and SD state and (b) MSE distribution under temperature of H and SD. Yellow marks indicate the minimum-difference region. MSE: mean squared error; OBS: optimal baseline selection; SD; single damage.
OBS unsurprisingly favors temperature-matched pairs: in our data, the OBS minima occur at small temperature offsets. Quantitatively, the best OBS MSEs are
In relative terms, our method reduces MSE by approximately
Additionally, further comparisons were made with OSS strategy. Unlike OBS, OSS attempts to mitigate baseline sparsity by interpolating between the two closest temperature baselines surrounding the target condition.
For example, Figure 11 shows the MSE distributions of OSS and the proposed framework under SD and DD conditions, where the red and blue curves denote the proposed and OSS results, respectively. When temperature coverage is dense and adjacent baseline pairs exist, the two curves nearly overlap, indicating that OSS can achieve performance comparable to OBS. However, as the target deviates from the available baselines, OSS errors increase sharply and reconstruction stability deteriorates.
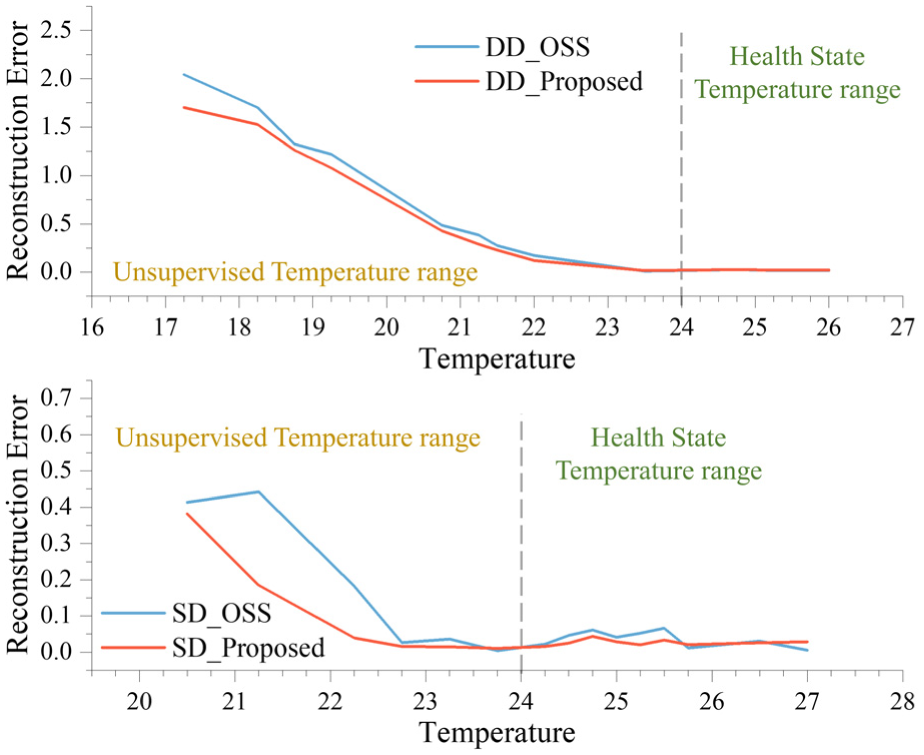
Reconstruction error analysis of OSS methods under different structural states. OSS: optimal signal stretch.
In the temperature range above
To further evaluate the effectiveness of the proposed framework, a comparative experiment with a deep-learning baseline model is conducted. Both methods are trained and evaluated under identical conditions, including the same learning rate, training strategy, and number of iterations, to ensure a fair comparison.
As shown in Table 11, the proposed method achieves lower localization errors in both SD and DD scenarios compared to the baseline model. The improvement is more evident in the DD case, where signal complexity and wave packet interactions are more pronounced. In addition, the reconstruction error is reduced, indicating improved waveform recovery under varying temperature conditions.
Quantitative comparison between the proposed method and the deep-learning baseline.
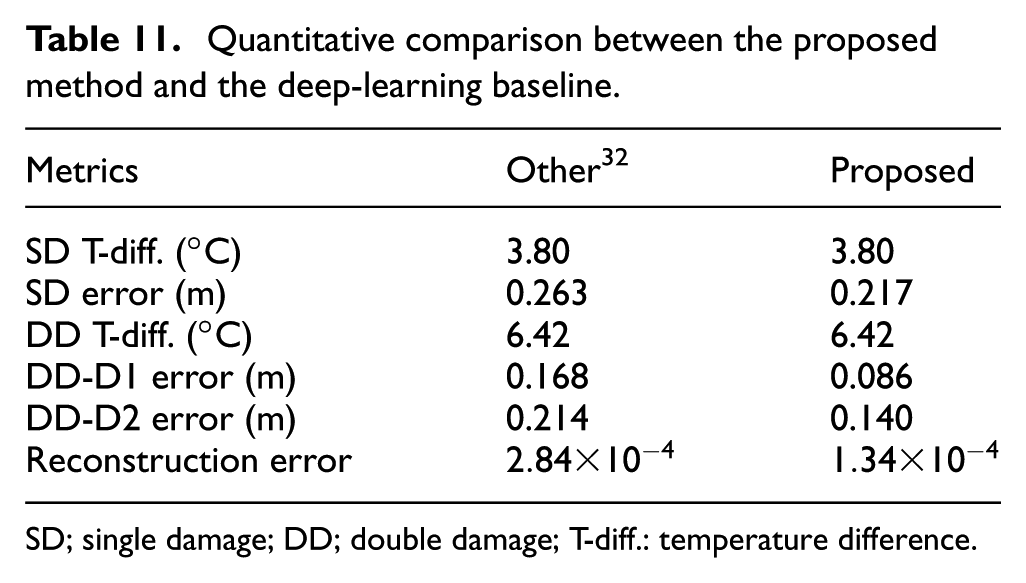
SD; single damage; DD; double damage; T-diff.: temperature difference.
These results indicate that, although the baseline AE can learn general signal representations, it lacks an explicit mechanism to capture temperature-induced variations. In contrast, the proposed rolling pairing framework learns the mapping between signals at different temperatures, enabling better alignment of phase and amplitude across wave packets. It should be noted that the error values reported in Table 11 are statistical results obtained over the entire testing dataset rather than at a single temperature condition. To better characterize the thermal variation involved in each case, the average temperature difference between the reference and testing signals is additionally provided. This suggests that the performance gain primarily arises from the temperature-aware training strategy rather than the use of deep learning alone.
Conclusion
To address the limitations of fully supervised and conventional unsupervised approaches in UGW SHM, a novel temperature-compensation framework is proposed. While supervised deep learning methods rely on labeled datasets and unsupervised strategies typically require large data volumes, the proposed framework achieves small-sample unsupervised learning via a rolling pairing strategy, improving data efficiency from
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key Research and Development Project of China [grant number 2023YFB3709605] and National Natural Science Foundation of China [grant number 62573259, 62373219, 62373215], which are highly appreciated by authors.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.