
Abstract
This research examines the problem of routing multiple assets of different types over a network to service demands, where the demands must be serviced by asset types in sequential order within a bounded amount of time, and minimizing the cumulative service time is of interest. Disrupting these decisions, an opponent seeks to identify effective network disruption strategies with limited resources to maximize the minimal cumulative service time. Within a bilevel programming structure for this Stackelberg game, the upper-level problem determines the disruption strategy, and the lower-level problem routes the assets. Seeking the identification of high-quality solutions with relatively low computational effort, this research identifies and tests three solution procedures: a greedy construction heuristic (GCH) that iteratively identifies each disruptive action, a customized implementation of simulated annealing (SA), and an enhanced variant thereof (eSA) that leverages a prioritized identification of candidate solutions along with a tabu list. Testing compares the solution methods on similar instances over a range of selected algorithmic and instance-specific parameters. Results showed the enhanced SA method performed best, and extended testing explored the effect of increasing selected problem sets on the relative improvement in eSA over GCH, as well as its effect on algorithmic runtimes.
1. Introduction
Consider a military scenario wherein an adversary has intelligence regarding the location of several assets they seek to destroy. First, intelligence, surveillance, and reconnaissance (ISR) assets must validate current intelligence, strike assets (e.g. aircraft and vehicles), move to the locations, and deliver munitions to destroy the targets. Such a process to “service demands” is also necessarily sequential in nature. In a defensive posture, we seek to conduct localized electronic interference, an aspect of an anti-access/area denial (A2/AD) environment.1,2 This communication interference can increase travel time in targeted areas of a network, as up-to-date information cannot be refreshed or confirmed. The desired effect of these actions is to delay the adversary’s attacks and provide time to move or protect their targets from destruction. Thus, it is of interest to identify where to apply electronic interference most effectively.
Alternatively, consider the following motivating civil scenarios. Commodities are being transported to major construction efforts across a region. They require delivery in a timely manner to various sites, and their delivery sequence is relevant (e.g. concrete before framing material, then electrical conduits and outlets, after which the wallboard arrives). Traffic congestion can slow traffic on portions of potential delivery routes. Such delays can disrupt scheduled deliveries. Yet, knowing the locations where delays are most impactful and rerouting is not helpful will inform where mitigating actions (e.g. dedicated, on-site traffic control and the establishment of priority lanes) have merit.
Similarly, after a natural disaster or heavy storm, some capabilities or commodities should be delivered as assistance to impacted towns before others (e.g. rescue equipment and medical assistance are needed before building repair materials). Road network conditions may be degraded, making travel over certain road segments take more time. Understanding where road damage would be most impactful can inform decisions regarding where to stage a limited road repair capability.
Generalizing these related scenarios, this research explores the problem of a defender disrupting the routing of different types of assets having disparate but complementary capabilities (or commodities to deliver) over a directed network to service a set of demands sequentially. Given
These realistic scenarios accentuate the importance of this research, which identifies a model and accompanying solution method to address the following problem statement, as framed for the former military application, but which is valid for either category of application.
1.1. Problem statement
Given a limited budget for arc-specific disruptions, each of which increases arc travel times, we seek a network interdiction strategy to maximally delay the cumulative servicing of demands by an adversary having assets that traverse a network to service multiple demands at different, fixed locations in a coordinated, sequential manner.
Within this statement, an interdiction strategy consists of actions to disrupt the flow of assets over the network by delaying them. Hereafter, we use the terms interdiction, disrupting action, and delaying action interchangeably.
1.2. Literature review
Informative to this research is the literature on bilevel programming, network interdiction modeling, and corresponding solution methods.
1.2.1. Bilevel programming
Frequently in the literature, one can find the problem of attacking a network paired with the defense of the same network, represented via a bilevel program model. These attacker–defender models are a type of Stackelberg game, 3 where the attacker and defender’s actions are sequential. Given an attack that degrades a network, how will the defender best achieve their objectives? Given the best response, what attack is most effective? Bilevel programming models were originally proposed to model such Stackelberg games that appear so often in leader–follower games in the market economy. 4 Such decision-maker objectives compete while subject to their respective set of interdependent constraints. Applications are seen in highway networks with objectives modeling operating costs, travel time functions, accident costs, and maintenance and repair expenses. 5 The preliminaries of the model used in this research assume that the participants do not exchange information, making cooperation prohibited. Due to the problem’s non-cooperative nature, participants cannot negotiate, introducing non-Pareto optimal solutions. 6 The top-level participant is assumed to anticipate the reactions of the lower-level problem and seeks to identify an optimal strategy accordingly. 7
The competitive framework influences the solution methods of a bilevel program in the problem definition. Many classical bilevel interdiction problems model a zero-sum game wherein participants compete over a common objective; the upper-level decision-maker seeks to maximize (or minimize) the minimum (or maximum) value the lower-level decision-maker can achieve. 8 Wood 9 presented a problem wherein one participant seeks to maximize flow on the network. The interdictor attempts to minimize the maximum flow by interdicting arcs and limiting the resource flow a priori. This type of problem scenario is most similar to the work presented in this research, where participants compete over an objective related to travel time on the network.
Bilevel programs also model non-zero-sum games wherein the decision-makers have different objective functions. Dempe et al. 10 studied a math programming model for natural gas shippers that attempted to maximize revenue while minimizing the number of transactions. Ma et al. 11 investigated energy outputs, where the upper-level model maximizes the benefits of sharing energy storage with a lower-level model to minimize system operating costs. Albornoz and Vera 12 studied a stochastic bilevel program in agricultural harvesting, considering interactions between the producer and wholesaler. Expanding these problems to have a multi-objective formulation becomes more nuanced, expanding the problem complexity. For example, Zhang et al. 13 formulated a bilevel programming model with multiple objectives in the upper-level problem, attempting to minimize total cost and service tardiness of electric vehicle charging stations, and with a lower-level objective of minimizing total travel time between stations. Nunes et al. 14 studied a multi-objective problem representing a trade-off between bike routing and cyclist preference.
Multi-level programming models have a variety of objective functions that vary depending on the network problem, usually dependent on the defender. Network defender problems in the literature address maximizing flow, 9 minimizing shortest path lengths and cost network flow, 15 and maximizing the probability of evasion. 16 Starita and Scaparra 17 explored an attacker–defender bilevel program wherein an attacker destroyed arcs, seeking to maximize congestion in a user equilibrium state. Other network interdiction problems more closely align with the problem statement set forth by this research, investigating the vehicle routing problem (VRP) while accounting for time. Sadati et al. 18 modeled an attacker–defender depot interdiction model. In a sequel, Sadati et al. 19 modeled a defender–attacker–defender trilevel program with a VRP in the lowest level. It represented defender protection of depots before the depot interdiction and operation, with competition over a composite objective function related to operating costs, travel costs, and unsatisfied demands.
Aside from a few works explicitly using time in network interdiction models as a measure of loss of efficiency on asset flow, our review of the literature identified no research that examines interdiction of multiple assets having relationships as in the underlying problem, i.e., wherein sequential servicing of demands by different asset types must occur in an order and within a limited duration of time. Moreover, where most previous studies explored arc-wise network interdiction to render arcs unusable, this research allows the use of the affected arcs with increased traversal times as a consequence.
1.2.2. Network interdiction models
Network interdiction models are prevalent in the literature regarding application and solution methods. 8 Bilevel network interdiction models come in the form of defender–attacker and attacker–defender models, where the actions of one party occur first, causing the second party to respond. The underlying problem studied herein could alternatively be categorized via either framework. For civil applications, interference with the network could be characterized as an attack, and the decision-maker operating on the network would be the defender. For military applications, the transit of multiple asset types over the network may be an attack by an adversary, and preliminary actions to slow travel would be defensive in nature. For simplicity of discussion, the remainder of this paper frames the problem as using only one such lens. Hereafter, we embrace the defender–attacker framework for its conceptual virtue, i.e., degrading an adversary’s ability to cause harm by deliberately slowing down their assets’ travel in subsets of the network. Thus, network interdiction is framed as a defensive action.
Network modeling in the form of defender–attacker often tries to prevent an attack or degradation of a system or at least minimize a metric of loss. For example, in research by Lei et al., 20 an attacker tries to destroy a subset of arcs on a network that will minimize the system’s source-to-sink flow by randomly interdicting an arc with a measure of uncertainty. The study investigates the defender’s choice to increase arc capacity to mitigate loss after the attacker’s plan has been decided. Risk-averse and risk-neutral behaviors of the attacker and defender are investigated. 20 Perea and Puerto 21 proposed a mathematical programming model that optimizes a network’s allocation of resources over an existing railway system to minimize the negative consequences of an attack. Not all defensive models focus on a physical attack nor degradation of the system. For example, Zokaee et al. 22 considered a humanitarian logistics network for disaster relief operations by modeling the shortages of relief commodities flowing through the system. The model investigates a three-level chain model of suppliers, distribution centers, and affected areas considered, seeking to maximize the satisfaction level of the affected population.
As intimated previously, some literature frames preliminary actions on a network followed by operations thereon as an attacker–defender framework. Insight into such attacker–defender models, and even the trilevel variant of attacker–defender–attacker models, reveals an advantage to the attacker every time. The defender is tasked with protecting an extensive network with limited assets to minimize disruption. In contrast, the attacker needs only to attack a subsection of the network. 23 Verter and Dasci 24 modeled the simultaneous optimization of plant locations with capacities on acquisition and technology selection decisions in a multi-commodity environment. Jouzdani et al. 25 combined asset location and network flow considerations by minimizing the cost of facility locations, traffic congestion, and transportation of milk and dairy products under uncertain conditions. The authors’ model utilized periods of demand uncertainty in a planning horizon to determine optimal facility location and production volumes. 25 Laan et al. 26 developed a zero-sum optimization model for the deployment of multiple assets for anti-submarine warfare, which required time dependencies.
1.2.3. Solution methods
Bilevel programming problems are challenging to solve; even simple linear bilevel programs are
Under certain circumstances, a bilevel program can be reformulated as a single-level math program and solved directly. Such cases occur when the lower-level problem is a convex optimization problem; reformulation of zero-sum games occurs by taking the dual of the lower-level problem, 9 and of non-zero-sum games by replacing the lower-level problem with its Karush–Kuhn–Tucker necessary optimality conditions. 7 These methods are likewise suitable for lower-level problems having integer-restricted variables, if certain conditions apply to the integer-relaxed variant (e.g. total unimodularity of a linear constraint matrix).
In the absence of such properties, bilevel programs with integer-restricted lower-level decision variables are more difficult to solve. If the upper-level decision variables are integer- or binary-restricted, some optimal approaches exist. Bard and Moore 34 converted a two-level problem into a single-level problem, iteratively solving it via a branch-and-bound technique. Branch-and-bound performance has improved by applying plane cutting techniques. 35 Complementary pivoting has also proven effective in finding global optimal solutions. 36
If the upper-level decision variables are not integer-restricted 37 or if they are but the problem is more challenging (e.g. nonlinear or large problem instances), a popular approach is to apply heuristics or metaheuristics to solve the upper-level problem while seeking the corresponding best solution(s) in the lower-level. These methods often include using trust-region methods 38 and penalty function methods. 39 Other techniques include simulated annealing (SA), 40 genetic algorithms,41,42 and particle swarm optimization, 43 as well as hybrid approaches that combine these techniques. 44
1.3. Statement of contributions
This paper makes two contributions to the network interdiction literature. First, it develops and validates a bilevel mixed-integer program for the problem of interest. A lower-level decision-maker routes assets of different types to sequentially visit demand nodes within limited duration time windows while minimizing the cumulative service times. In direct opposition, an upper-level decision-maker disrupts the network with actions to increase travel time on subsets of arcs, maximizing the minimum cumulative service times. Second, it proposes greedy and simulated annealing-based metaheuristic methodologies to find and improve feasible solutions to the Stackelberg model consistently.
Within the remainder of this paper, Section 2 presents the model and accompanying solution methodology. Section 3 illustrates the results of applying the solution method to a small, representative instance, scopes the computational experiments to test the relative efficacy and efficiency of alternative solution methods, reports the testing results, and discusses resulting insights. Thereafter, Section 4 concludes the research and suggests meaningful extensions.
2. Model formulation and solution methodology
2.1. Model formulation
Several assumptions are necessary to frame the model. First, the defender–attacker model is assumed to entail sequential decisions, wherein the defender interdicts the network, and the attacker subsequently routes assets of different types to service demands in a coordinated manner. Second, the attacker is aware of the defender’s interdiction strategy before routing assets. These two assumptions correspond to an extensive form game-theoretic framework (i.e. a Stackelberg game) with perfect information, and the latter allows us to consider the attacker’s best response to a given defender’s strategy. Third, the defender has complete information about the attacker’s asset routing and servicing problem. Such an assumption is appropriate as the defender has an excellent intelligence-gathering enterprise. (For the alternative modeling perspective supporting civil applications, this assumption is also appropriate when seeking to identify the most effective disruptions, i.e., the greatest network vulnerabilities.) This assumption is relevant because it allows the defender to consider the attacker’s best response to a given strategy and, in doing so, seek to identify the best interdiction strategy. Of note, because the defender seeks to maximize the cumulative service time of demands, which the attacker seeks to minimize, our bilevel programming model represents the interaction of a zero-sum, extensive form game-theoretic framework with complete and perfect information. 45
The following sets, parameters, and decision variables make up the bilevel programming model studied through this paper. The model consists of multiple asset types routed on a directed network to supply nodes from predetermined demand nodes. Different asset types are required to satisfy demand in a prearranged sequential order, and asset types are capable of traveling arcs at different speeds.
2.1.1. Sets
-
2.1.2. Parameters
2.1.3. Decision variables
Given this notation, we formulate the bilevel problem




















As indicated within the objective function (1), the defender and attacker, respectively, seek to maximize and minimize the cumulative time to collectively service the demands. Revisiting the motivating military application, the cumulative service time for each demand node is an appropriate performance metric of interest because the players are focused on the time at which a target is destroyed. For the civil application context, this timing indicates the full provision of needs to a demand, i.e., what matters to the citizens who pay taxes and vote for the elected officials who manage emergency relief systems.
Constraint (2) computes the arc travel times
For the attacker’s routing problem, constraint (5) enforces the conservation of flow for the movement of assets without requiring their return to respective origins. Constraint (6) applies a lifted variant of the MTZ subtour elimination constraints. Constraint (7) requires at least one asset
Constraints (8) and (9) calculate the time at which each asset visits nodes as it moves through the network. Within constraint (9), the term
Constraint (11) bounds
Finally, constraints (16)–(20) enforce the respective, appropriate restrictions on the decision variables.
As an aside, we note that Problem P has a convenient, alternative use. As formulated, it considers a defender seeking to delay an attacker via route-delaying interdictions at locations
2.2. Solution methodology
It is of merit to analyze the formulation of Problem P to identify an appropriate solution methodology. Bilevel programming problems are
The
Although the lower-level formulation in Problem P has binary-valued
For a given defender solution
An exhaustive enumeration of the upper-level feasible region is unwise. For
We propose three solution methods to search the upper-level feasible region to identify high-quality solutions with relative computational efficiency. As Table 1 indicates, these methods, respectively, consist of a greedy construction heuristic (GCH); GCH followed by simulated annealing (SA); and GCH followed by an enhanced variant of simulated annealing (eSA).
Solution methods examined.
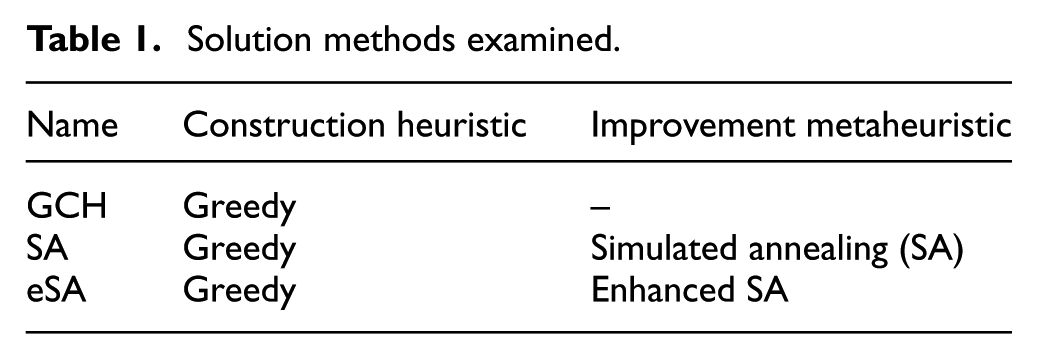
Whereas the first solution method entails only the identification of a feasible solution using GCH, the second solution method subsequently applies a simulated annealing metaheuristic. 54 We selected simulated annealing as a baseline metaheuristic because GCH provides a single solution upon which to improve. In contrast, population-based metaheuristics (e.g. genetic algorithms, 55 particle swarm optimization, 56 and ant colony optimization) 57 require more initial candidate solutions, and their generation would require the embrace of deliberately worse construction heuristics or random interdiction strategies, neither of which has conceptual appeal. Other single-solution metaheuristics are certainly available (e.g. Tabu search 58 and GRASP) 59 , and a consideration of their mechanisms informs the third solution method. Subsequent discussion details the components of each solution method and their implementation.
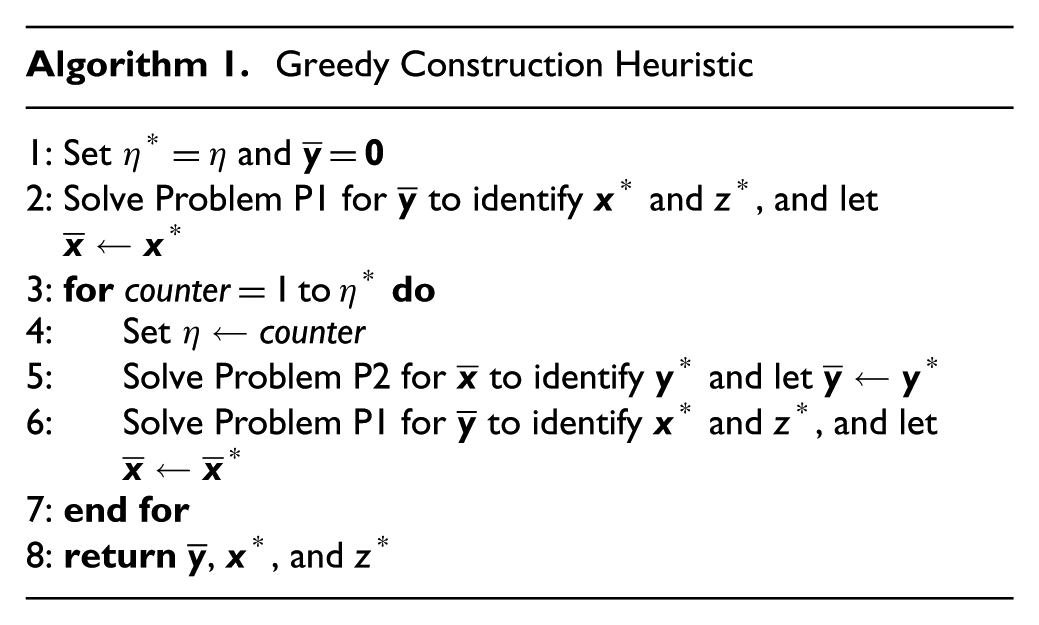
2.2.1. Greedy construction heuristic
GCH identifies a conceptually effective, feasible solution to Problem P. Whereas greedy heuristics entail no assurance of identifying an optimal solution, a logical series of choices when constructing a feasible solution will often yield a good solution. Given
Define
Define
Leveraging these definitions, Algorithm 1 presents GCH. Line 1 initializes the total number of disruptive actions
2.2.2. Simulated annealing metaheuristic
Originally developed by Kirkpatrick et al., 54 SA is a useful improvement metaheuristic for vehicle routing problems (e.g. Osman, 60 Van Breedam, 61 Chiang and Russell, 62 Vincent et al., 63 and Prihodko et al. 64 ) and, more specifically, for VRPs with fixed time windows (e.g. Laporte et al. 65 and Mohammadi et al. 66 ). Other interdiction models have explored the use of SA to achieve near optimal solutions for large scale models (e.g. Janjarassuk and Nakrachata-Amon, 67 Parsafard and Li 68 ). The SA framework has also proven effective at finding solutions to the latency location routing problem, 69 which minimizes the sum of arrival times to service demands.
Whereas a hill-climbing algorithm or descent method seeks only to improve solutions, the SA metaheuristic allows a move within a feasible region from a current solution to a solution with a worse objective function value. The goal of this allowance is to avoid becoming trapped in a local optimum that would otherwise preclude a broader search of the feasible region, thereby improving the likelihood of identifying a global optimum. Such a wariness of converging to a local-but-not-global optimum is warranted for nonconvex optimization problems, including mixed-integer linear programming problems like Problem P.
Each iteration of a conventional implementation of SA functions as follows. Given a feasible solution and a defined neighborhood of solutions, identify and evaluate a candidate solution in the neighborhood. If the candidate solution is feasible and has an improved objective function value, accept it as the new solution with certainty; otherwise, accept it as the new solution with some probability
SA Neighborhood Definition. Given a feasible interdiction strategy
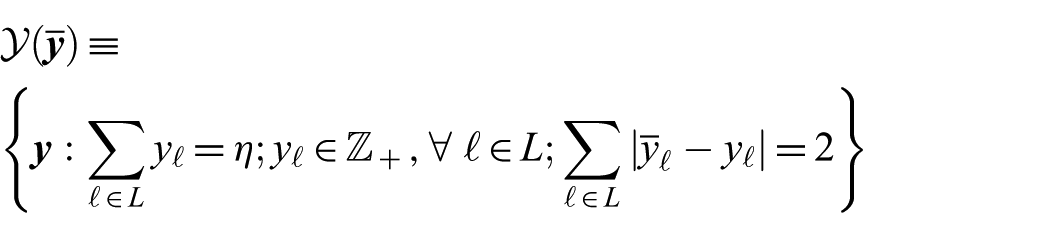
In practice, one can identify a candidate solution
Solving P1 for the candidate solution
SA Probability Function. The probability function defined in Equation (21) computes the likelihood

Of note,

Defining the temperature threshold and maximum iteration count used for alternative SA termination criteria as
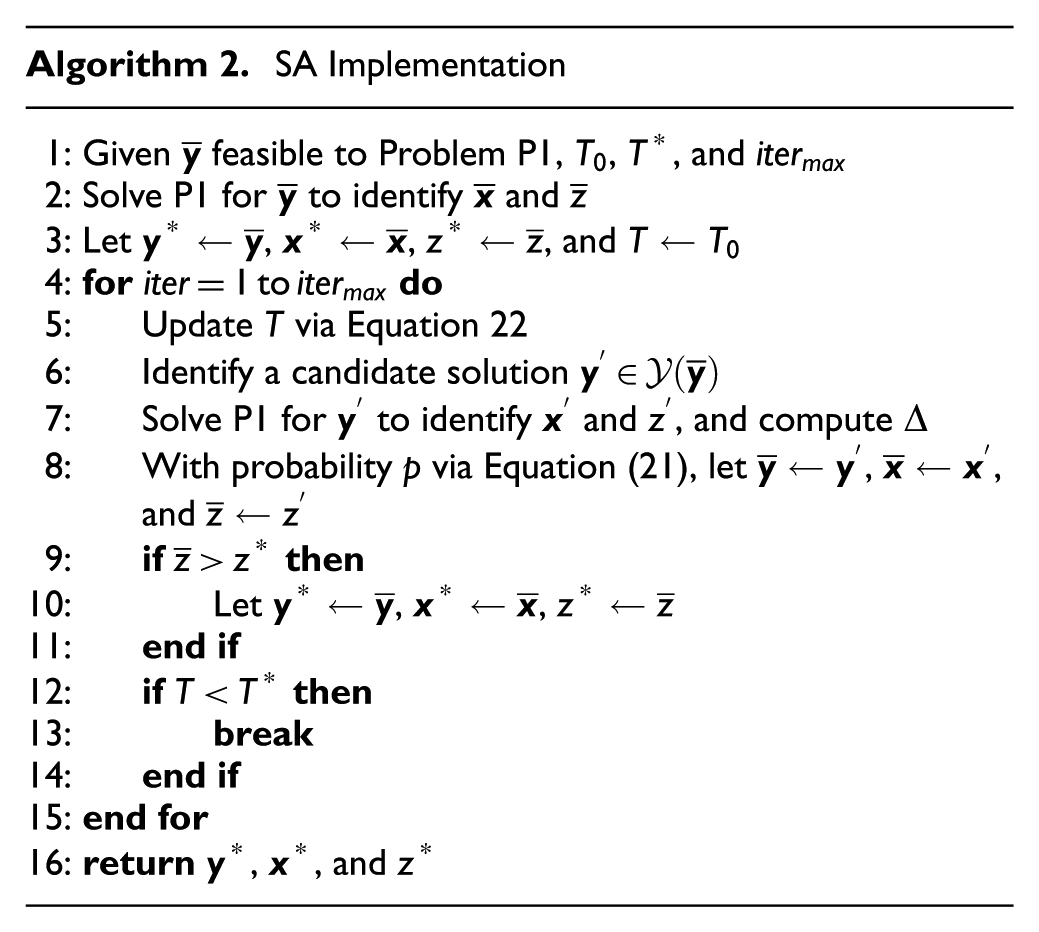
Within Algorithm 2, Line 1 recognizes the initial feasible solution, the initial temperature parameter, and the two alternative termination criteria. Line 2 identifies the best routing response for the interdiction strategy and the corresponding objective function value. Given an initial solution identified via GCH, Line 2 is not necessary, but we retain it to represent SA for alternative means to identify an initial feasible solution (e.g. a randomly generated interdiction strategy). Line 3 initializes the incumbent solutions and cooling temperature. Within Lines 4–15, SA identifies and evaluates at most
2.2.3. Enhanced simulated annealing metaheuristic
Within Algorithm 2, Line 6 incurs a notable computational expense. As previously discussed, Problem P1 is
Borrowing from the Tabu Search metaheuristic,
58
eSA maintains a bounded tabu list of the most recently examined interdiction solutions. If a candidate solution
With regard to generating a candidate solution in Line 6 of Algorithm 2, eSA discards the randomized mechanisms for moving a disruptive action to a new location, as discussed in Section 2.2.2. It instead embraces a conceptually greedy approach, seeking to move a (perceived) least effective disruptive action to a location where it would be most effective. Given a solution
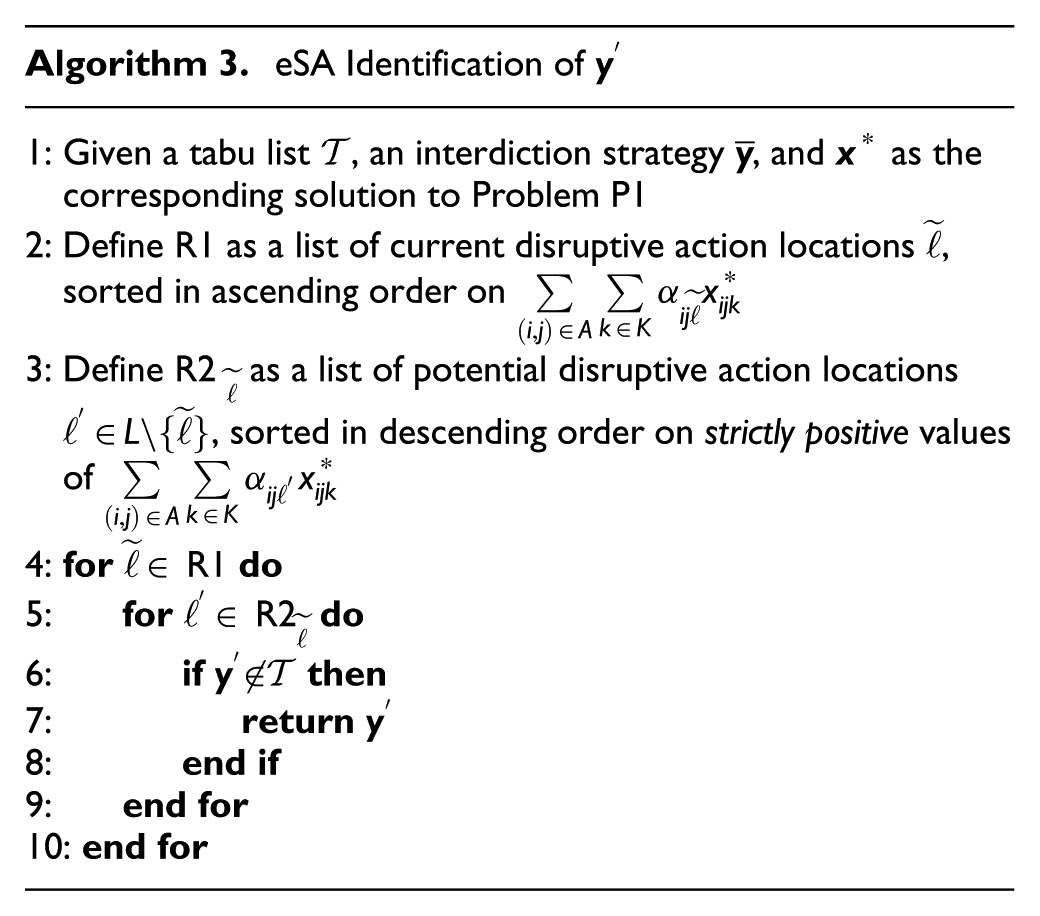
Within Algorithm 3, we seek to identify the pair of locations
Algorithm 3’s identification of
3. Testing, results, and analysis
For a network
3.1. Illustrative example
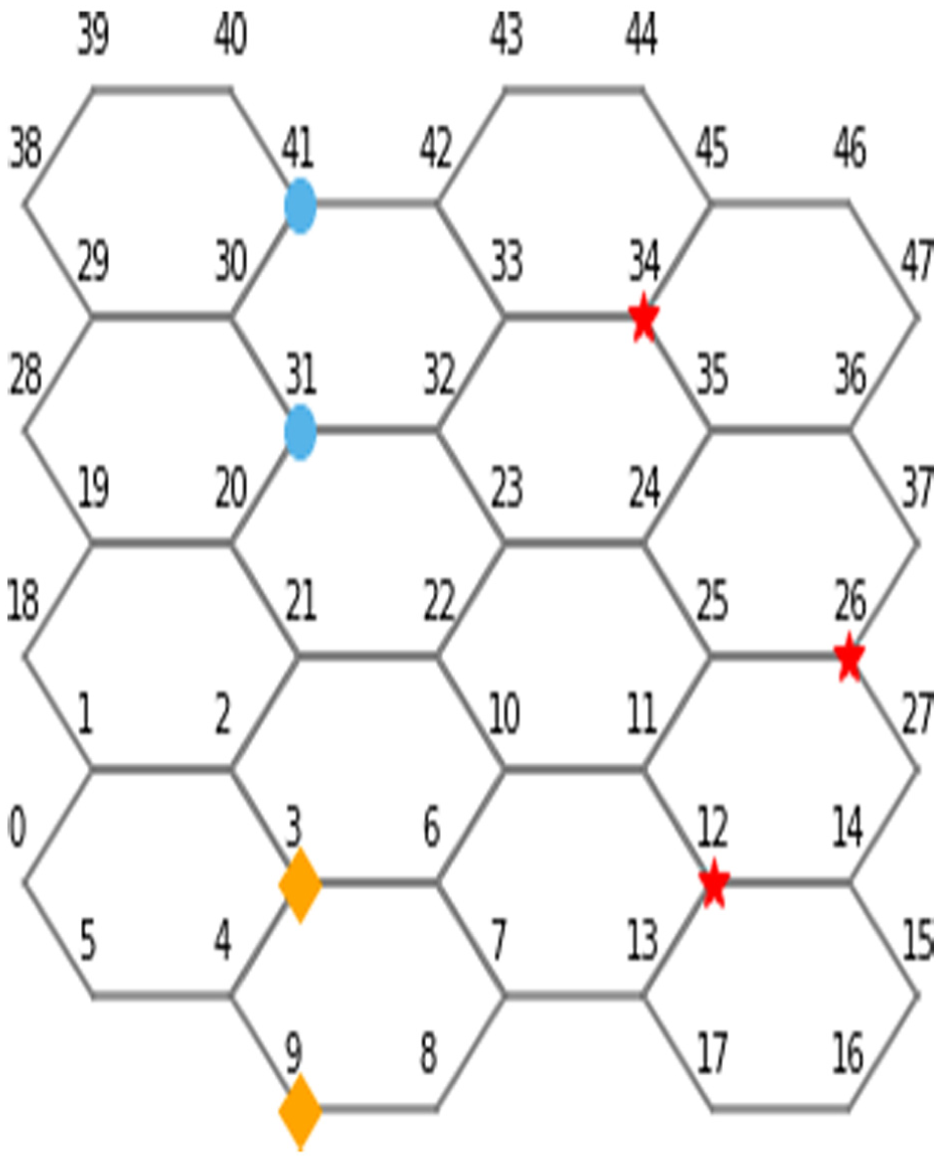
For the illustrative example, Figure 1 presents the hexagonal mesh with 16 regular hexagons (i.e.
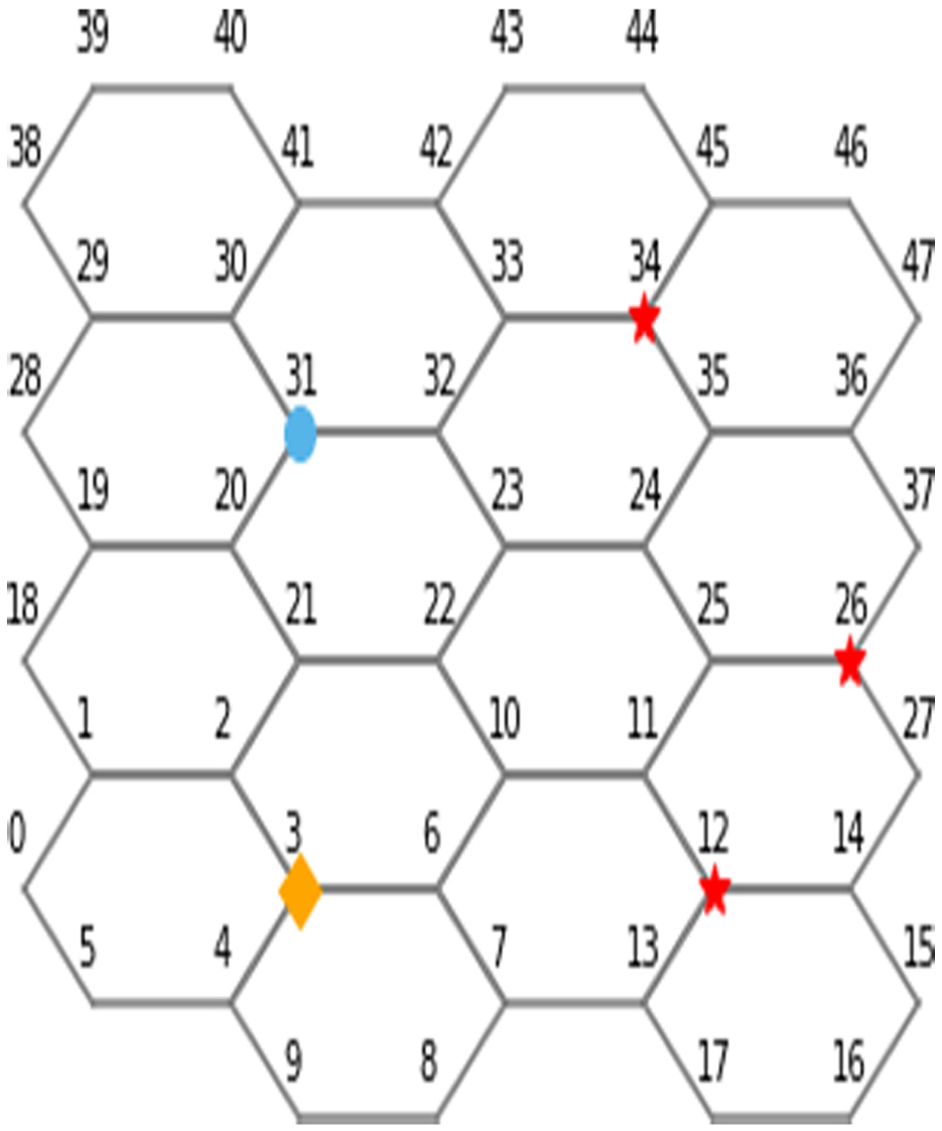
Illustrative example: Hexagonal mesh, initial asset locations, and demand node locations.
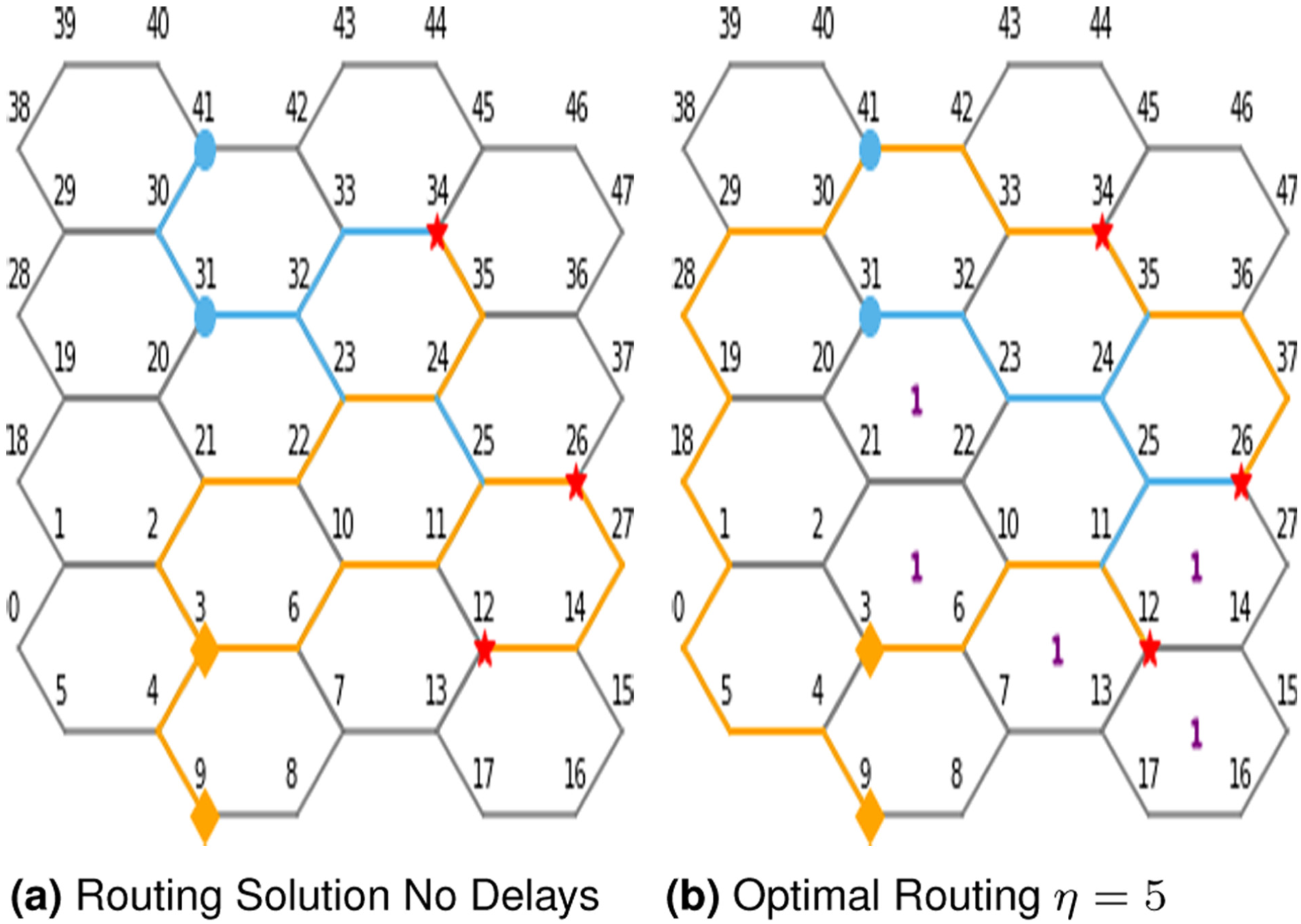
Figure 2(a) illustrates an optimal routing of the assets to service demands in the absence of delaying actions implemented by the defender (i.e.
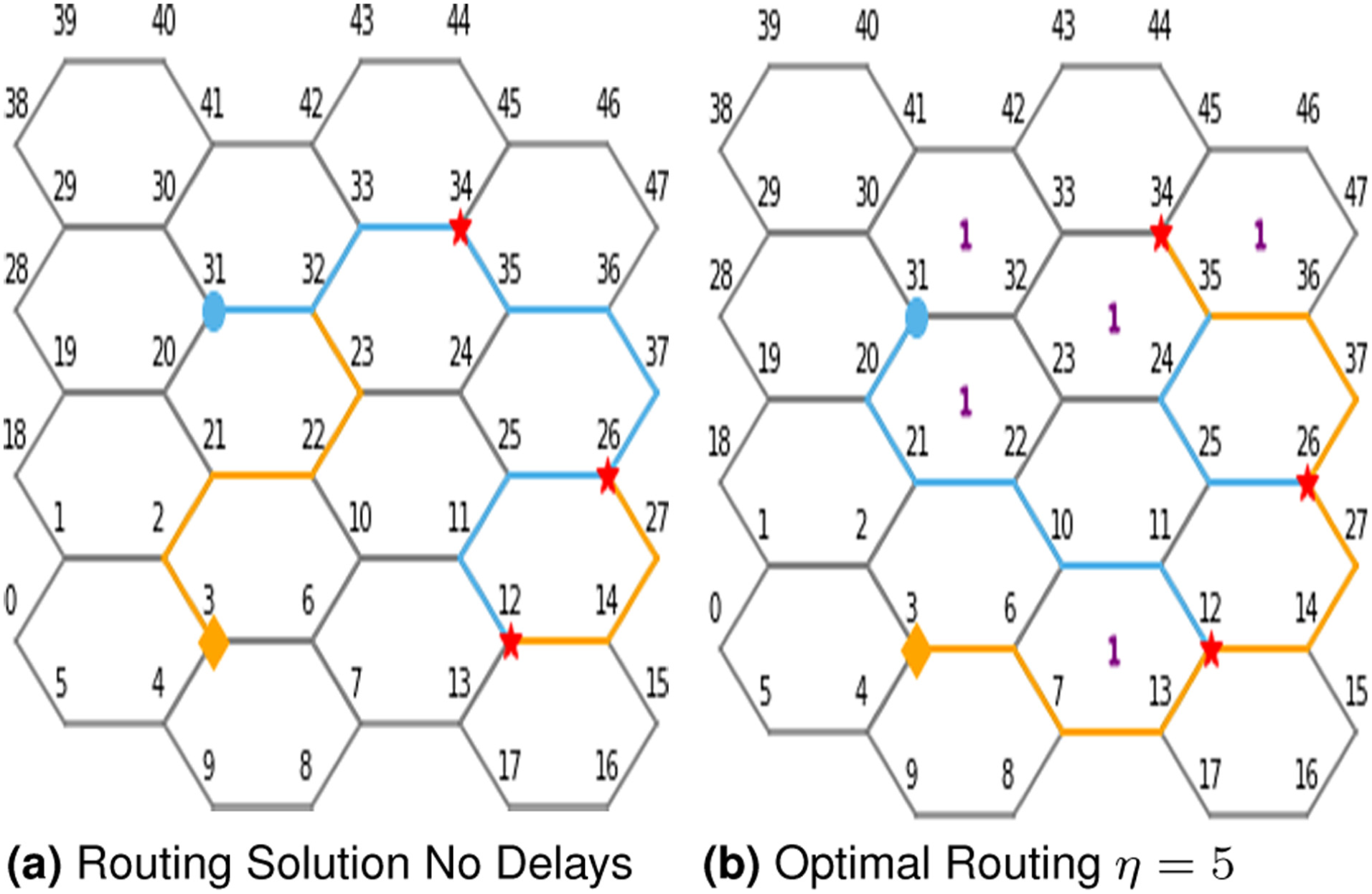
Example model execution. (a) Routing solution with no delays. (b) Optimal routing
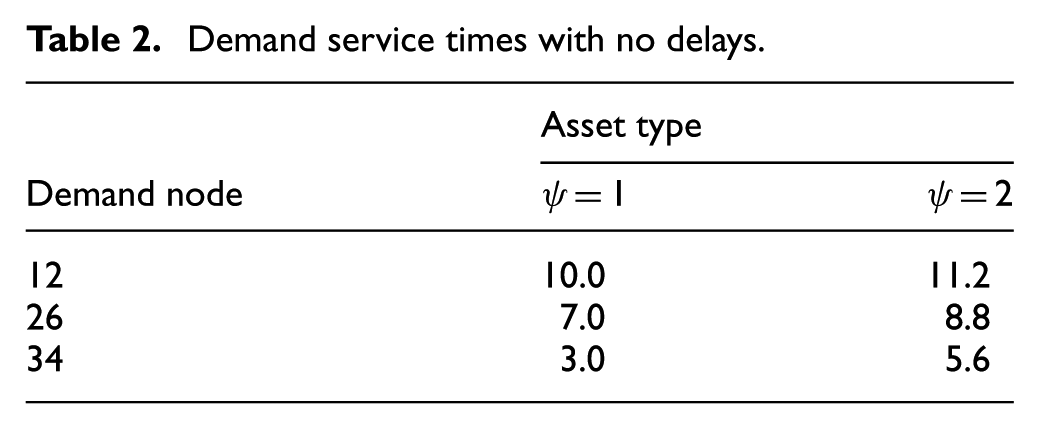
Accompanying the visual depictions in Figure 2(a) and (b), Tables 2 and 3 report the
Demand service times with no delays.
Demand service times with GCH-identified
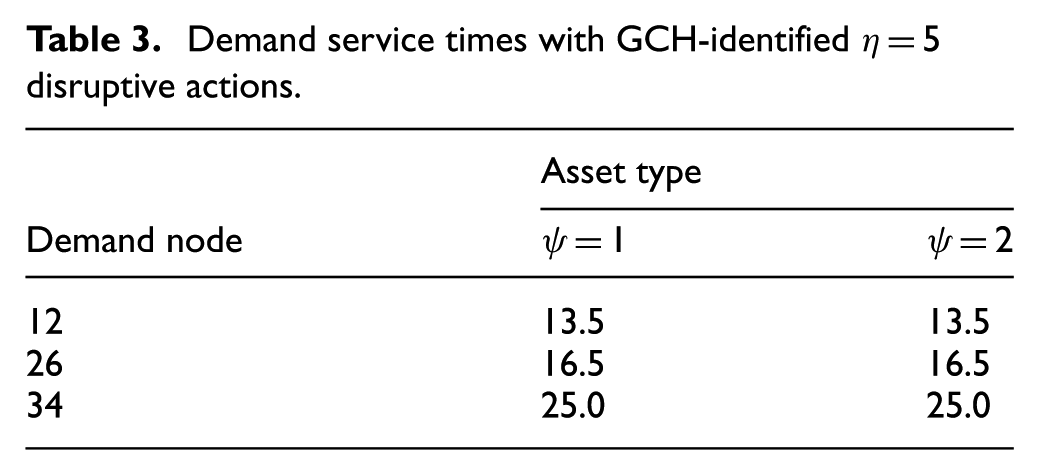
As an aside, there do exist alternative optima for the asset routing. The two paths traversing from Node 26 to Node 35 (i.e.
3.2. Parameter exploration
To evaluate the potential of both SA and eSA to improve upon the GCH-identified solution, testing considered alternative numbers of delaying strategies (
Values to explore.
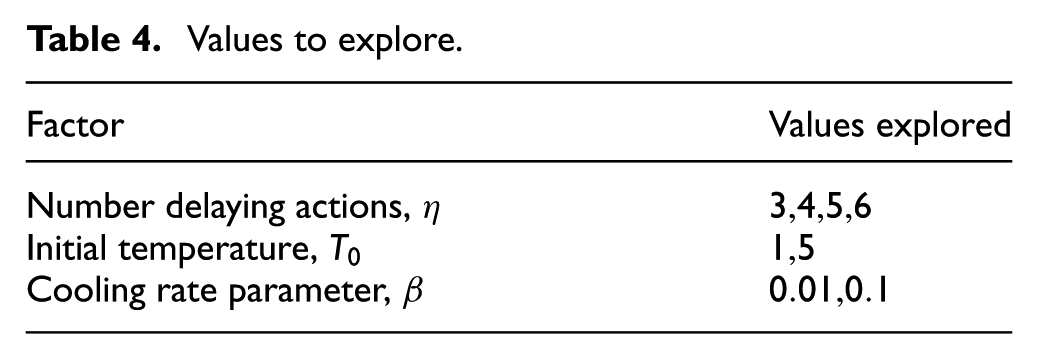
For the baseline instance depicted in Figure 2(a), testing examined both SA and eSA with a combination of the parameters in Table 4, initializing them with a GCH-identified solution having the same
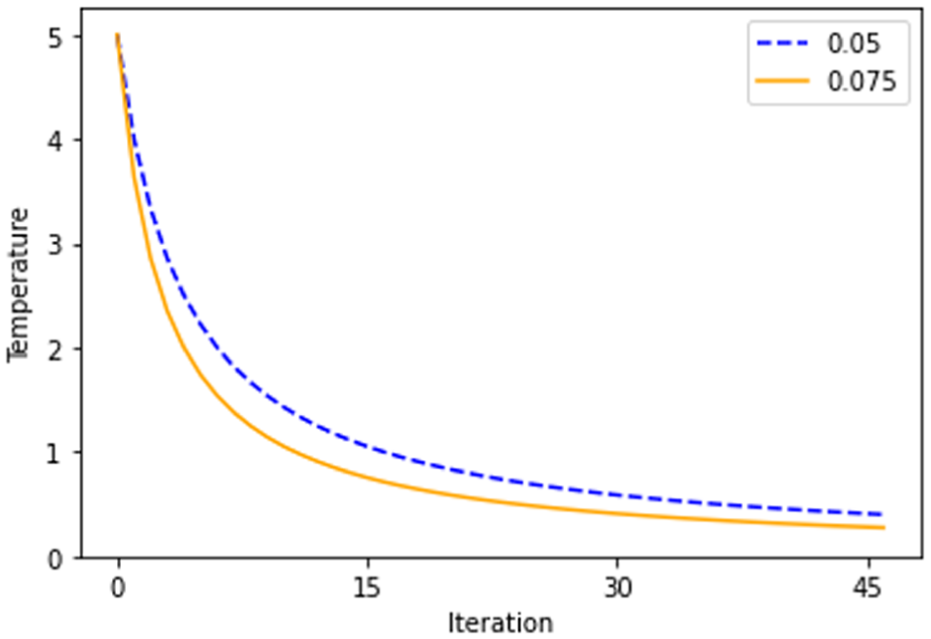
Figure 3 depicts four temperature update functions over the respective
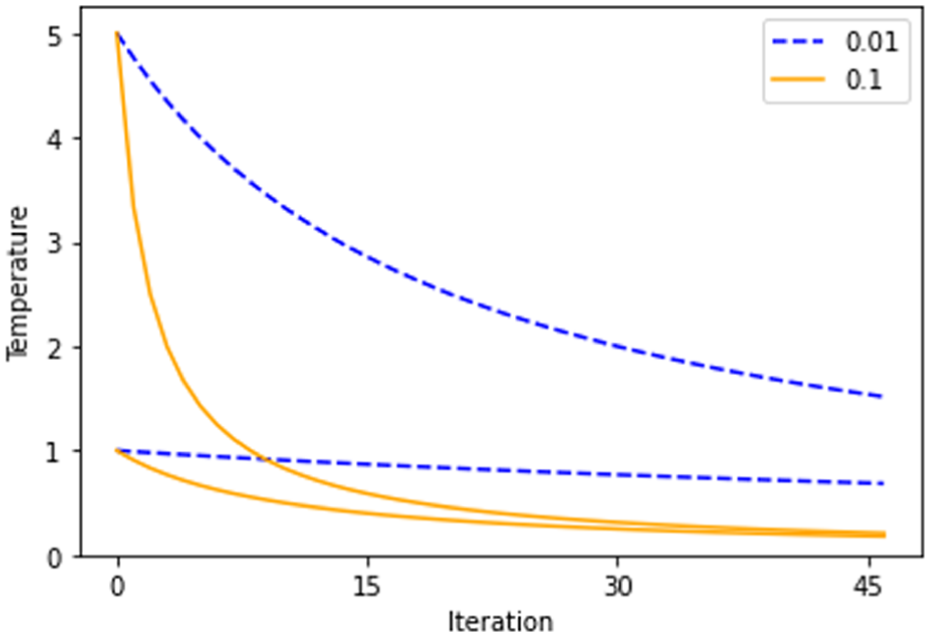
Annealing temperature as a function of
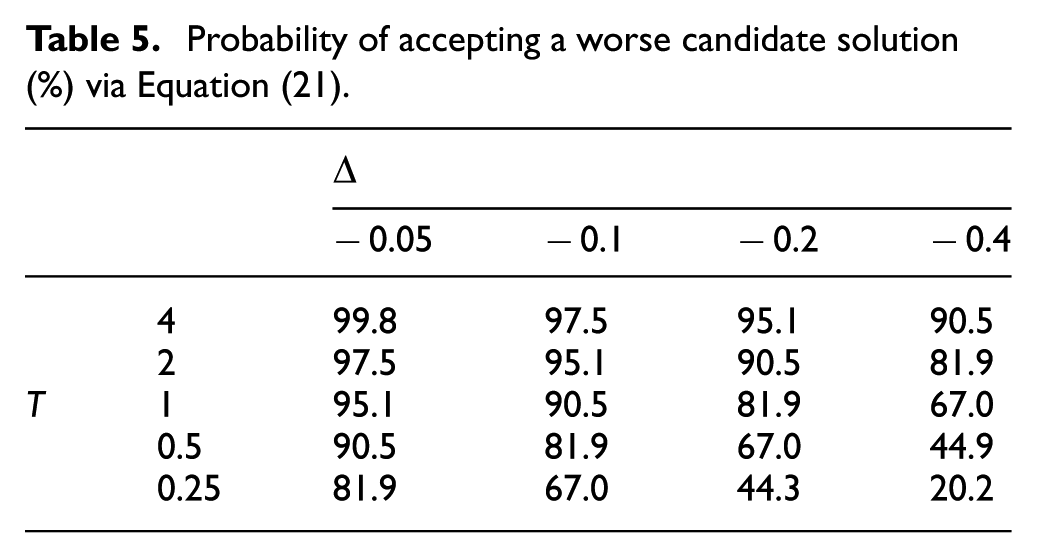
If a candidate solution improves the currently accepted solution, both the SA and eSA algorithms will accept it with certainty; otherwise, the probability of acceptance is determined by current temperature,
Probability of accepting a worse candidate solution (%) via Equation (21).
3.3. Comparative testing of solution methods
Table 6 reports the objective function value attained via GCH for each of the
Objective function values for solutions identified via the greedy construction heuristic.
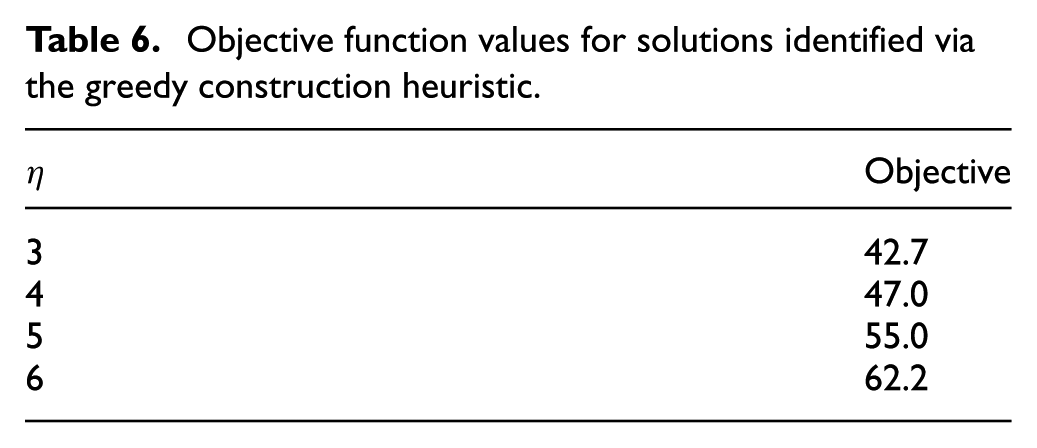
Table 7 presents the best objective function value found after 45 iterations of SA and eSA for each combination
Best objective function value after 45 iterations for the SA and eSA algorithms.
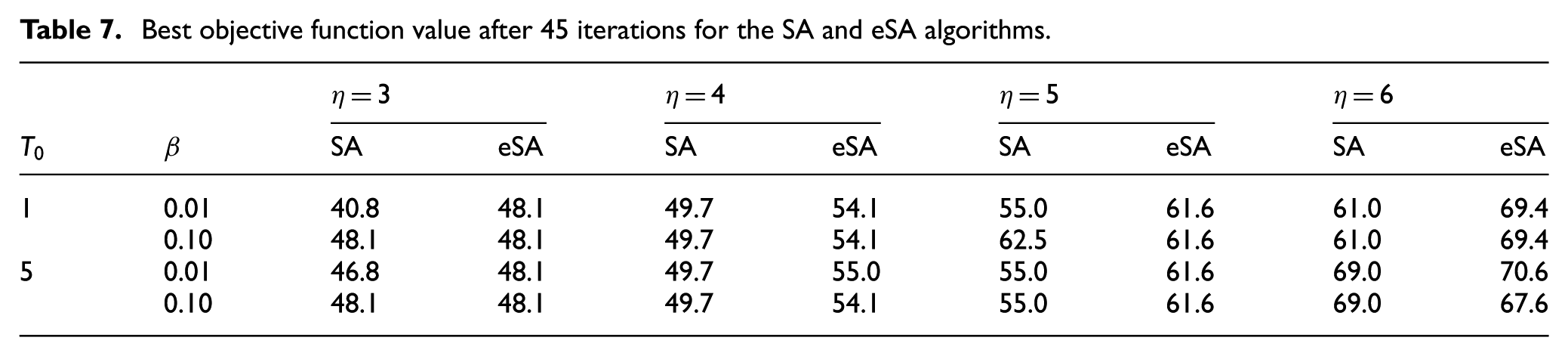
Whereas a higher initial temperature portends better outcomes, the effect of
Overall, these results compel an examination of whether the annealing aspect of the SA and eSA algorithms is effective. That is, for these instances, would SA or eSA perform better by either never accepting a worse candidate solution (i.e.
Best objective function value after 45 iterations for the SA and eSA algorithms in the absence of annealing, i.e., with fixed probability
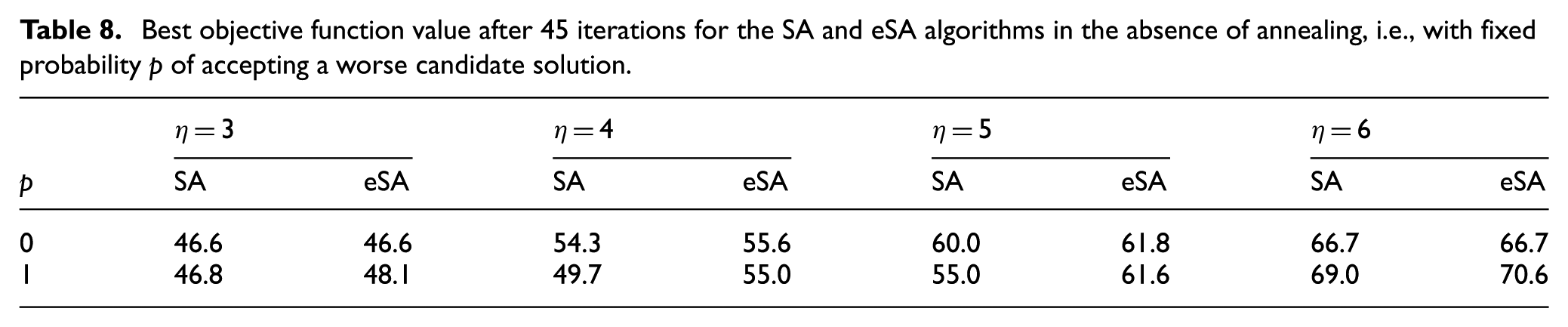
Within the results in Table 8, eSA performed as well or better than SA for each instance. However, neither never (
For the testing reported in Tables 7 and 8, Table 9 presents the relative performance of eSA and SA regarding the objective function value and the required algorithmic runtime. More specifically, it tabulates the percentage of instances for which eSA performed as well as or better than SA. The first row aggregates the results over all combinations of
Instances (%) for which eSA performed as well or better than SA.
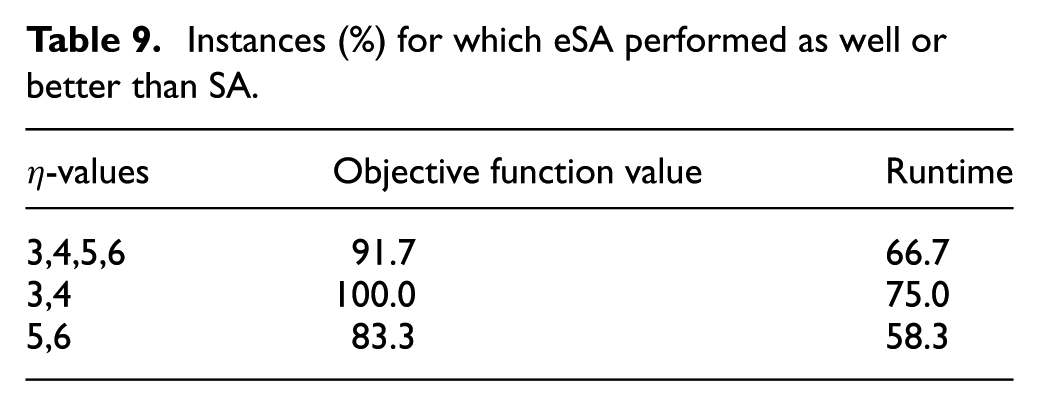
The eSA algorithm found equivalent or better solutions than SA for 91.7% of the instances of different
In addition, testing examined the relative performance of eSA and SA over five different starting seeds for pseudorandom number generation. Not reported in detail here, testing found that eSA always found the same or better solutions than SA, and it found them more consistently; eSA found the same best solution across all random seeds explored, whereas SA identified a distinctly different best solution for each random seed.
3.4. Selected excursional analyses
Additional testing examined the effects of the different values of
3.4.1. Sensitivity analysis for
-values
Testing results in Section 3.3 indicated the merit of having higher
Annealing temperature for
Table 10 presents the best objective function value identified by the respective SA and eSA algorithms after 45 iterations for the
Best objective function value after 45 iterations for the SA and eSA algorithms with

Based on the results in Table 10 and previous testing, we recommend the use of eSA with a higher
3.4.2. Additional assets for each asset type
Additional testing explored a modified instance having
Modified illustrative example: Hexagonal mesh, initial asset locations, and demand node locations.
Figure 6(a) and (b), respectively, presents the asset-routing solutions for no disruptive actions (
Example model execution: additional assets. (a) Routing solution, no delays. (b) Optimal routing
For each
Best objective function values identified via GCH and eSA after 45 iterations with
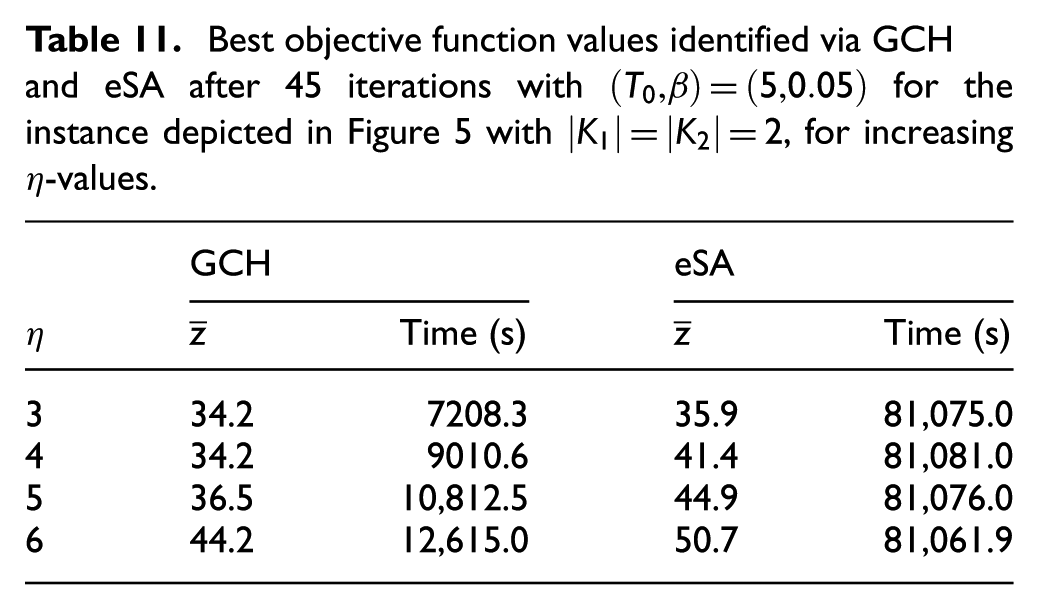
GCH managed smaller improvements as
This improvement required a 6- to 11-fold increase in runtime. For challenging problem instances, this ratio is foreseeable. The additional asset added to each asset type complicated the solver’s ability to reach optimality for Problem P1 instances, even with a 30-min runtime. Given the time limits, the maximum time to apply GCH for
Note that the eSA runtime is the runtime after it is initialized with the GCH-identified solution. Given 45 iterations with a 1800 time limit to solve each lower-level problem, the maximum eSA time is
Whereas results presented in Section 3.3 exhibited an average relative optimality gap less than 0.01% for lower-level problem instances, these results averaged 73.9%. Of note, such results do not indicate that the solutions to the lower-level problems are necessarily suboptimal; they demonstrate the solutions to be no worse than indicated, but they may be better. In general, they illustrate the
In general, eSA has merit if the planning time to identify disruptive actions allows enough time to use it. However, it is worth noting that eSA found the best improved objective within the first 15 iterations (
3.4.3. Additional asset type
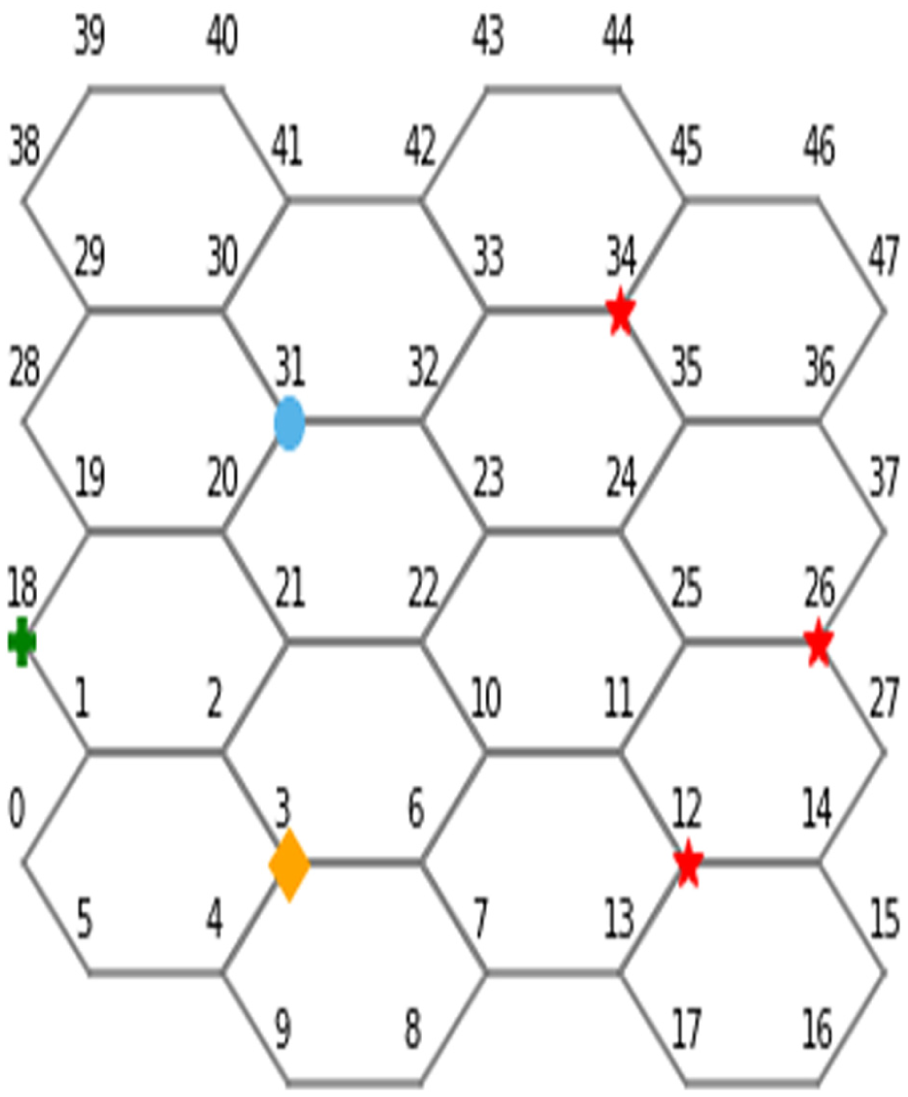
Illustrative example: three asset types.
Figure 8(a) and (b), respectively, presents the routing solutions for no disruptive actions (
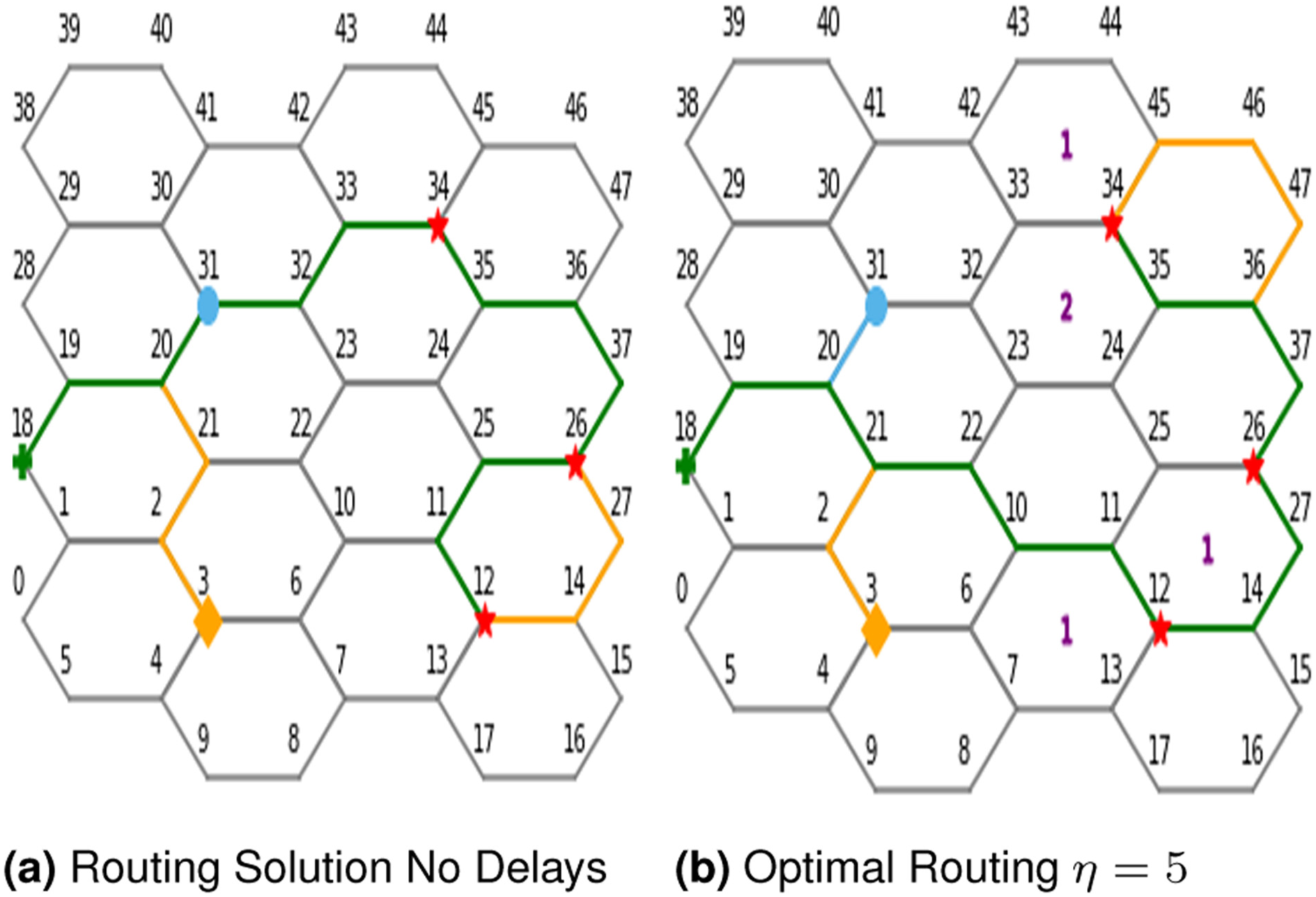
Example model execution
Table 12 reports the respective objective function values and runtimes for GCH and eSA, again after 45 iterations with
Best objective function values identified via GCH and eSA after 45 iterations with
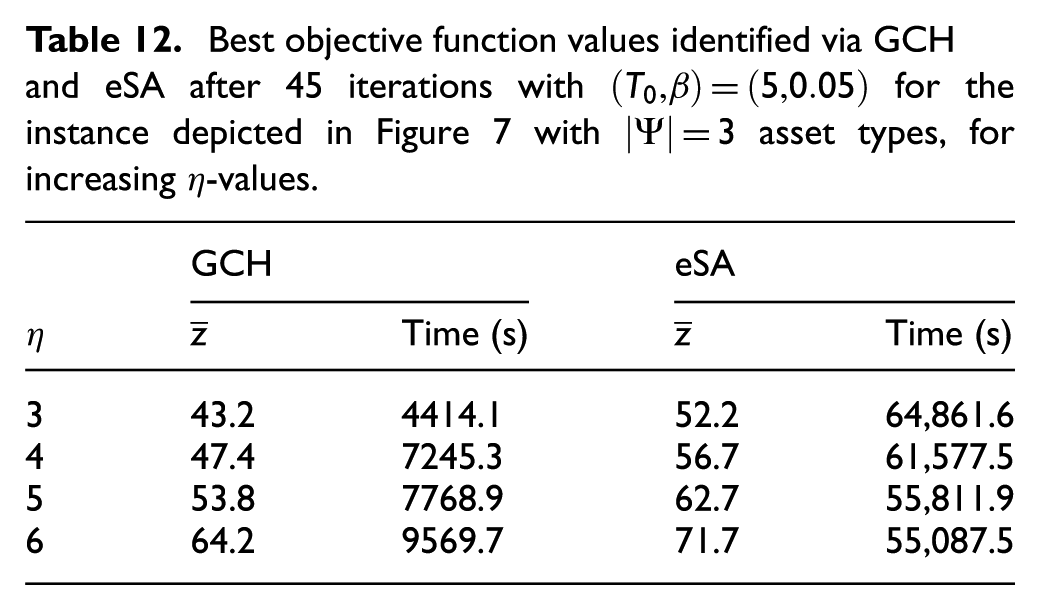
The trade-off between eSA and GCH vis-á-vis solution quality and algorithmic runtime merits discussion. With respect to solution quality, eSA improved upon GCH solutions by a minimum, average, and maximum of 11.7%, 17.3%, and 20.8%, respectively. However, the marginal improvement over GCH strictly declined with an increase in
Interestingly, this marginal decrease with increasing
In general, eSA did find improvement within the first 15 iterations; for only one third of the algorithmic runtimes reported in Table 12, eSA improved over GCH by 10.4%, 14.6%, 16.5%, and 3.3%, respectively, for
4. Conclusions and recommendations
For a subclass of vehicle routing in which multiple asset types are required to service demands in a predetermined sequential order over a contested network, this research formulated the problem as a bilevel program, wherein the lower-level problem routes different types of assets to satisfy demands while minimizing the cumulative service times. Simultaneously, the upper-level problem seeks to identify a strategy that imposes a bounded number of disruptive actions that slow down agent travel on subsets of the network, seeking to maximize the cumulative service time of demands.
This research set forth and evaluated three solution methods: a GCH, a SA metaheuristic, and an enhanced SA that leverages a priority-based candidate solution identification and a tabu list of previously considered solutions. Both simulated annealing-based methods improved upon GCH solutions over a range of problem and algorithmic parameters, with the latter technique doing so more consistently.
Additional testing showed that a larger number of assets of each type was computationally cumbersome, whereas an increased number of asset types was less so. In both excursions, eSA improved the initial solution GCH notably, and it did so within the first 15 iterations (7.5 h) of runtime.
A natural extension of this work would focus on improving the computational effort required to solve the lower-level problem for a fixed disruption strategy. Although outside the scope of this research, decomposition methods merit study. Within Problem P1, the routing of agents is almost separable, except for the sequencing of assets to service each demand within a bounded time window. Such a structure lends itself to subproblems and a restricted master problem, giving promise to improved tractability for these and larger instances, in turn reinforcing the general solution procedure for the bilevel program.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was partially sponsored by the US Transportation Command (USTRANSCOM).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Disclaimer
The views expressed in this article are those of the authors and do not reflect the official policy or position of the US Air Force, the Department of Defense, or the US Government.