
Abstract
A major challenge for sustainable agriculture is finding alternatives to herbicides, which contribute to biodiversity loss and health risks. While digitalization is often presented as the solution to “the weeding problem,” this article untangles how digitalization is changing human–machine–nature interactions in the case of digital weeding technology. Building on critical theory of technology and Science and Technology Studies (STS), we analyze the histories of these technologies and their grounded interactions with nature and humans. Our findings challenge dominant narratives of “Big AgTech” by revealing that digital weeding is largely driven by mid-sized family corporations and specialized startups, creating a distinct mechanical–digital hybridity. We demonstrate that “precision” is not a stable technical property but an emergent outcome of interactions between mechanical tools, nature's materiality, and local farming contexts. Furthermore, while these technologies may create new dependencies on proprietary software and mapping services, they simultaneously challenge findings on “digital Taylorism” by potentially improving work quality for tech-savvy employees. Moreover, we uncover affective dimensions of human–robot relations—farmers naming robots and treating them as animal-like co-workers—that shape technology adoption in ways overlooked by current literature. Ultimately, we argue that understanding agricultural digitalization requires moving beyond data-extractive models to account for the messy, affective, and ecological entanglements of working farms.
Keywords
Introduction
A decade ago, agriculture may have seemed an unlikely frontier for cutting-edge automation. Yet today's farms are increasingly equipped with some of the most sophisticated autonomous systems deployed outside of manufacturing, and robots navigate complex, changing environments in close interactions with farmers and farmworkers. This makes agriculture an excellent site for examining fundamental questions about digitalization that extend beyond the farm: How do humans develop trust, and even affective relationships with autonomous technologies in everyday work contexts? How does digitalization contribute to worker surveillance and labor control? How do ecological conditions enable or constrain what digital systems can accomplish? And whether and how digital technologies can contribute to more sustainable production practices? Understanding these dynamics in the messy, unpredictable environments of working farms becomes crucial not only for agriculture but also for broader debates about automation, labor futures, and everyday human–computer interactions (HCI).
Critical scholarship on precision agriculture has emphasized two seemingly divergent dynamics when it comes to the on-farm engagement with digital technologies. On one hand, political economy analyses document how digital technologies contribute to labor displacement and an increase in digital surveillance and control of farmworkers (Prause, 2021, 2025; Siegmann et al., 2024). Big AgTech companies sell precision agriculture technologies that threaten farmer autonomy through data extraction, algorithmic and AI farming recommendations, and technological lock-in (Bronson and Knezevic, 2016; Clapp, 2025; Miles, 2019). This echoes broader debates around corporate power, labor control, and surveillance through forms of digital Taylorism (Altenried, 2022; Zuboff, 2019). On the other hand, practice-oriented research demonstrates that agriculture remains a fundamentally embodied, situated activity where farmers actively shape their engagements with technologies, often in ways that diverge from corporate intentions (Finstad et al., 2021; Higgins et al., 2023; Rose et al., 2023; Yañez and Argüelles, 2025). Whether digital technologies can uphold their main selling point of increasing precision depends on algorithmic training data as much as local climatic and ecological conditions and farmers’ engagement with these technologies (Visser et al., 2021). These studies show digital technologies becoming entangled with farmer knowledge, sensory experience, and ecological dynamics in context-specific ways, creating diverse sociotechnical assemblages rather than uniform transformations.
Rather than treating these as competing narratives, we argue that understanding agricultural digitalization requires integrating structural analysis with attention to material practices and ecological entanglements. Thus, we examine how histories of corporate traditions of technological development become embedded in specific digital technological artifacts, and how these artifacts then mediate farmer–labor–nature relations in particular ways. This requires moving beyond treating “digital” or “precision agriculture” as a monolithic category to examine how specific technologies—with distinct material configurations, developmental histories, and design logics—shape different possibilities for practice. Where previous contributions have centered on farmers’ embodied knowledges to explain the outcomes of human–technology interactions (Velden et al., 2023), we take technology itself as our starting point, tracing how its material properties, design choices, and historical evolution shape the human–nature–technology interactions that emerge in practice.
Weeding proves particularly instructive as a case study for several reasons. First, it sits at the intersection of multiple technological trajectories and political-economic forces. Digital weeding technologies are developed not primarily by Big AgTech companies but by mid-sized family-owned machinery manufacturers and specialized robotics start-ups, suggesting alternative pathways in agricultural digitalization that the literature's focus on data extraction and platform capitalism tend to overlook, while the more practice oriented studies in the literature have not really engaged with the issue of digital weeding technologies (see e.g. Velden et al., 2023 on crop farming or Martin et al., 2022 and Finstad et al., 2021 on robotic milking systems). Second, weeding exemplifies how environmental politics and ecological dynamics shape technological development. Herbicide bans, regulatory pressures, evolving weed resistance, and the push toward organic agriculture create contexts in which mechanical weeding becomes strategically important, making digitalization of these tools a priority for manufacturers and farmers alike. Third, as a persistent agricultural challenge requiring interaction with living organisms (weeds) in dynamic environments, weeding offers ideal conditions for examining how technological precision is achieved (or not) through assemblages of digital systems, mechanical implements, ecological conditions, and farmer practices rather than through technical specifications alone.
Tensions over weed management now sit at the heart of environmental politics in agriculture (Argüelles and March, 2021; Cusworth and Lorimer, 2024). How we manage weeds over the next three decades will determine whether we can safeguard biodiversity in agrarian landscapes, protect farmworker health, reduce water pollution, and maintain livable rural communities (European Environmental Agency, 2023). Conventional wisdom holds that weeds compete with crops for light, space, nutrients, and water, and that removing them by hand is backbreaking labor. The agrochemical solution has been herbicides. However, industrial agriculture's intensive herbicide use has become a key contributor to biodiversity loss and water pollution (Wan et al., 2025). Many herbicide active substances have been banned for over two decades, beginning with Methyl Bromide in 2004 (Guthman, 2019). Glyphosate, the world's most widely used pesticide, faces regulatory struggles across multiple sites (Vicanne, 2023). Yet environmental regulations aren’t the only challenge: “superweeds” have evolved herbicide resistance, forcing farmers toward increasingly toxic alternatives (Bain et al., 2017).
In this context, digitalization is being promoted as the solution to “the weeding problem” and a pathway toward ecological transformation. The European Union's Green Deal and Farm-to-Fork strategies exemplify this approach, pursuing a “twin transition,” the entanglement of green and digital transformations, to achieve sustainable agri-food systems (Kovacic et al., 2024; Santarius et al., 2023). Major agribusiness companies like BASF and John Deere have invested heavily in smart spraying equipment. However, these technologies remain dependent on chemical herbicides and lack independent evidence of biodiversity benefits, while raising concerns about corporate control and data ownership (Bronson and Knezevic, 2016; Rotz et al., 2019).
An alternative technological pathway that has existed for centuries is mechanical weeding. While the rise of chemical pesticides relegated mechanical approaches to the organic agriculture niche for many decades. Both the organic sector and segments of conventional agriculture interested in reducing pesticide use are adopting a wide variety of mechanical weeding tools (Argüelles and March, 2023). This renewed interest from farmers, policymakers, and industries has catalyzed the application of digital solutions to mechanical weeding, which are now promoted as revolutionizing weed management. Weeding has emerged as one of the most promising applications for agricultural robotics that might actually contribute to greening agriculture (Lenain et al., 2021) while addressing genuine challenges farmers face daily.
With all this in mind, we ask: How is digitalization changing human–machine–nature interactions in the specific case of mechanical weeding in vegetable farming? Our argument unfolds in four parts. First, digital weeding represents an alternative pathway in agricultural digitalization, one less centered on data extraction than on mechanical–digital hybridity, developed primarily by traditional machinery manufacturers and specialized robotics start-ups rather than Big AgTech platforms. This complements dominant political economy narratives while revealing new forms of farmer-manufacturer dependency around software support and mapping services. Second, we demonstrate that “precision” in digital weeding is not a stable technical property but emerges through interactions of technological artifacts, ecological conditions, farm infrastructures, and farmer knowledge. This challenges techno-optimistic claims about revolutionary precision and adds to more data-centered arguments about imprecision (Visser et al., 2021), while revealing how nature's materiality continually exceeds technological control. Third, we show that human–robot relations in agricultural contexts involve an affective dimension rarely discussed in agricultural digitalization literature but central to the field of HCI. Fourth, we argue that unlike data extractive technologies, weeding robots, while replacing a part of the seasonal workforce, have the potential to increase the work quality of permanent tech-savvy employees on farms, thus challenging findings on digital Taylorism both inside and outside the agricultural sector (Altenried, 2022; Prause, 2021, 2025; Smith, 2024; Siegmann et al., 2024).
Bridging political economy and embodied practices in precision agriculture
A substantial body of critical scholarship has examined precision agriculture through the lens of political economy, documenting how digital technologies are reconfiguring power relations in agri-food systems. These analyses reveal that precision agriculture is not a neutral set of tools but rather embodies specific economic interests and governance logics that reshape who controls agricultural knowledge, decision-making, and value capture (Bronson and Knezevic, 2016; Carolan, 2017; Clapp, 2025; Rotz et al., 2019). Central to these concerns is the entry of venture capital and Big Tech companies (Sauvagerd et al., 2024) and the integration of new digital technologies for data and value extraction into the product portfolio of the traditional agri-food input producers like Bayer or John Deere (Bronson, 2022; Clapp, 2025; Prause et al., 2021). These technologies often come bundled with service contracts, data-sharing agreements, and technical dependencies that fundamentally alter the relationship between farmers and input suppliers, raising critical questions about farmer autonomy (Clapp, 2025; Hackfort et al., 2024). Some authors argue that farmers are partially transformed into digital laborers, generating data through their engagement with precision farming technologies and providing agri-tech companies with essentially free labor as well as new avenues for their own surveillance (Rotz et al., 2019; Stone, 2022).
Precision technologies are also reshaping agrarian labor relations (Rotz et al., 2019). Farmers adopt digital technologies in the hope of replacing farm labor (Carolan, 2020). Baur and Iles (2023) suggest the liberatory imaginary, where farming is freed from the needs of farm labor. Digital tools are also used to increase control over farmworkers and intensify labor processes and farmworker surveillance through digital Taylorist methods (Prause, 2021, 2025; Siegmann et al., 2024). However, as important as these structural analyses are, they sometimes present precision technologies as relatively uniform, disembodied, and placeless tools: black boxes that operate according to corporate logics regardless of local contexts (Velden et al., 2023). This tendency can obscure the messy realities of how technologies actually work (or fail to work) in diverse farming contexts and how farmers actively shape their engagements with digital tools.
A second, emerging body of work challenges deterministic and homogenous readings of precision agriculture by foregrounding the embodied, situated practices through which farmers engage with digital technologies. This scholarship demonstrates that agriculture remains a highly corporeal and sensorial practice in which farmers’ bodily experiences and their multiple connections with material and more-than-human elements are central to making farming work (Carolan, 2017; Ditzler and Driessen, 2022; Higgins et al., 2017; Legun and Burch, 2021; Velden et al., 2023). Rather than viewing precision technologies as external impositions that simply displace farmer knowledge or particular ways of farming, these studies reveal diverse forms of engagement. Rose et al. (2023) document how farmers partially adopt precision technologies, retrofit existing equipment, and improvise hybrid solutions that combine digital tools with conventional practices. Higgins et al. (2017, 2023) and Finstad et al. (2021) analyze precision agriculture as sociotechnical assemblages where technologies, farmers, farmer support networks, animals, crops, soils, weather, and economic pressures come together in contingent, context-specific ways. They argue that precision farming emerges through the provisional stabilization of heterogeneous elements rather than through the implementation of predetermined technical systems. These assemblages are never fully stable but require ongoing work to hold together, and they can be assembled differently depending on local conditions and farmer choices. Visser et al. (2021) suggest that digital technologies, even though they promise increased precision, are often inaccurate due to faulty sensors, algorithms trained on old data, or the way farmers use the technologies in practice. Velden et al. (2023) argue that digital technologies do not replace embodied knowledge but become entangled with it in complex ways. Farmers develop new forms of sensorial engagement with their fields through digital mediations, learning to “see” through sensors and data visualizations. As such, precision agriculture creates hybrid farmer–technology configurations where boundaries between human and machine become blurred. The “cyborg farmer” is neither fully autonomous nor entirely determined by technology but emerges through ongoing negotiations between human capabilities, technological affordances, and environmental conditions. Trust plays an important role in these configurations, crucially determining how farmers engage with digital technologies and how much of their decisions they base on data versus their more embodied knowledges (Legun et al., 2022; Yañez and Argüelles, 2025; Yañez et al., 2026). This strand of research aligns with broader calls in agri-food studies to attend to the lived experience on farms and the assembling of heterogeneous elements, human and non-human, technological and organic that constitute agricultural practice (Carolan, 2017). However, practice-oriented studies sometimes bracket questions of power and labor relations in favor of detailed ethnographic attention to local interactions.
Rather than treating these as competing perspectives, we argue that integrating insights from both critical political economy and practice-centered approaches offers a more precise understanding of technology–human–nature relations in digital farming, as it allows us to examine both the structural forces shaping agricultural digitalization and the situated, emergent practices through which digital weeding technologies are enacted on farms. This combination also allows for relevant insights into broader debates on changing labor relations in digital capitalism and HCI.
We do so by building on the critical theory of technology (Feenberg, 2002; Feenberg, 2017a, 2017b), which bridges more political economy-focused thinking on technologies pioneered by the Frankfurt School with early constructivist Science and Technology Studies (STS) approaches. Technologies here are crystallized strategies that reflect the interests and rationalities of dominant actors (e.g. corporations, technical experts, state agencies) who shape technological design (Feenberg, 2017a: 8). Technologies embody specific configurations of power not through determining outcomes but by making certain arrangements easier and others harder. Thus, design choices for digital farming technologies reflect corporate assumptions about “proper” farming while possibly foreclosing alternatives. Yet technologies are also sites of ongoing contestation. Technologies can be redesigned through user practices and social struggles, incorporating values and knowledge excluded from initial designs (Feenberg, 2017a). This “democratic rationalization” needs to be understood as taking place as part of a wider assemblage that includes the technological user, the technology, its local and wider economic, ecological, and social context, in our case: farmers, weeding technologies, agrarian structures, living and non-living nature.
This framework allows us to examine how corporate histories of technological development structure weeding technologies while remaining attentive to how farmers might appropriate, modify, or resist these technologies in the context of living and non-living nature. Rather than looking at digital technologies as abstract placeless tools, we study their different interactions with agriculture's materiality and sociality, their different embodied experiences, and their historic continuities.
Methods
Primary data for this analysis came from in-depth interviews with vegetable farmers, distributors, and developers of machinery carried out in Germany, Spain, and California on the adoption and workings of mechanical and digital weeding technologies. These regions have relatively important agricultural sectors, they are seeking to improve environmental standards, and in all three countries, farmers are experimenting with digital and non-digital forms of mechanical weeding. We acknowledge they may have different traditions in developing and adopting machinery, yet the objective was not to highlight regional differences. Indeed, the global market for weeding machinery operates across the Western world.
As our interest was in understanding what “the digital” means to weeding technology, we started by understanding the technologies themselves, both digital and non-digital, how they work, what they do, for what purpose, and the possible impact on farms. While doing that, we identified the main developers of weeding machinery that were available for commercial agriculture in those countries. We then contacted the companies and asked them for interviews. Farmers using digital technologies were contacted in Germany and California, while in Spain (where there seem to be very few farmers adopting digital weeding tools), we interviewed those using traditional mechanical tools.
We focus on digital weeding technologies that are used in vegetable production or row crops because weeding is commonly more challenging in this type of farming, both in conventional and organic agriculture (cereal is planted with higher density, avoiding the intra-row space). Moreover, conventional farming is, at least in the EU, facing severe restrictions on post-emergence herbicide application in vegetable production. Conventional farmers are therefore increasingly combining chemical and mechanical weeding methods. For organic farmers, mechanical tools have always been their primary weeding method.
From 2021 to 2023, we conducted in-depth interviews both online and in person with different actors involved in the development, implementation, and use of mechanical weeding tools (digital and non-digital): farmers (n = 22), farmworkers (n = 3), technology developers/manufacturers (n = 13), and distributors (n = 6). All farmworkers interviewed were permanently employed workers, with no migration histories; two of them were operating weeding robots, while one actively opposed the use of weeding robotics on the farm where she was employed. Farmers, with one exception, were all men between 30 and 50 years old, managing medium-sized vegetable farms (5–80 ha). The number of actors interviewed in each country is presented in Table 2 in Appendix.
We also reviewed information from developers and distributors operating in Europe and the United States (e.g. websites, brochures, technical information for machines, videos) as well as sectoral and general media covering the issue of digital weeding technologies. In addition, the authors engaged in observation and participant observation at events, machinery fairs (FIMA, Fruit Logistica, World FIRA, and other local ones in Germany and Spain), daily farm work at several farms in the three regions, as well as informal conversations with farmers. In all these events, we took field notes that we coded later.
In order to conduct data analysis, we fully transcribed our interviews and field notes and coded them in ATLAS.ti and MAXQDA. All data were transcribed in the original language, and excerpts of the coding were later translated into English. We coded abductively, where we started from some theoretical sensitivity from existing literature on digital technologies in agriculture and thus focused on our three different elements: technologies (e.g. imaginaries, material characteristics, functioning, histories), nature (e.g. crops, soil, farm structure, elevation), and humans (e.g. farmers’ experiences, workers engagements, values, knowledge, norms, etc.). We then inductively zoomed in on how these elements interact with one another. This approach was conducted as an exploratory case study into an area of digital technology use in agriculture that, we believe, does have different characteristics from the more data-intensive forms of digital agriculture that have been at the center of much of the current literature. It is therefore intended to sensitize the ongoing debates to complementary and sometimes different perspectives on precision, labor, and human–machine interactions, and AgTech company–farmer relations. The study was not designed for empirical representativeness for digital weeding machinery use in our case study contexts.
From hoe to robot: The histories of technological development around digital weeding
Weeding is the most tedious and repetitive task on farms. Traditionally, weeding was done manually with a hoe. Additionally, tilling, plowing, and crop rotation are preventive weeding methods that have been practiced for thousands of years. “Before the onset of chemical control for weeds, most of the work on the farm [in summer] was hoeing (…) Without mechanization, the size of a farmer's holding and yield was determined by how well (and how fast) a family could weed its land” (Ziska and Dukes, 2010: 1). Technological developments such as herbicides and mechanization drastically reduced the amount of labor needed for weeding, yet it is still considered the most challenging and labor-intensive element to manage when turning to organic farming. Integrated pest management (using insects to eat other insects) is widely adopted by farmers to avoid insecticides. Sulfur and copper, allowed in organic production, act as fungicides. If farmers want to avoid or reduce herbicides, the way is mechanization.
Mechanical methods work by disturbing the soil around the crops, therefore unrooting weeds and exposing them to air and sun so they die. Weeding in vegetable fields requires intra-row and inter-row hoeing. Inter-row means hoeing the space between crop rows, while intra-row requires hoeing between plants on each row. With horse implements and later tractor implements, it was possible to hoe inter-row. Since then, several mechanical weeding tools have been designed for intra-row weeding, such as tine harrows, finger weeders, or disc harrows. These are made of steel and provide different solutions—that is, patented designs—for mechanically uprooting the weed. Most of them allow for regulating pressure or intensity depending on crop size and soil conditions. A main drawback to mechanical weed control is the negative effects of deep ploughing and soil compaction carried out by heavy machinery.
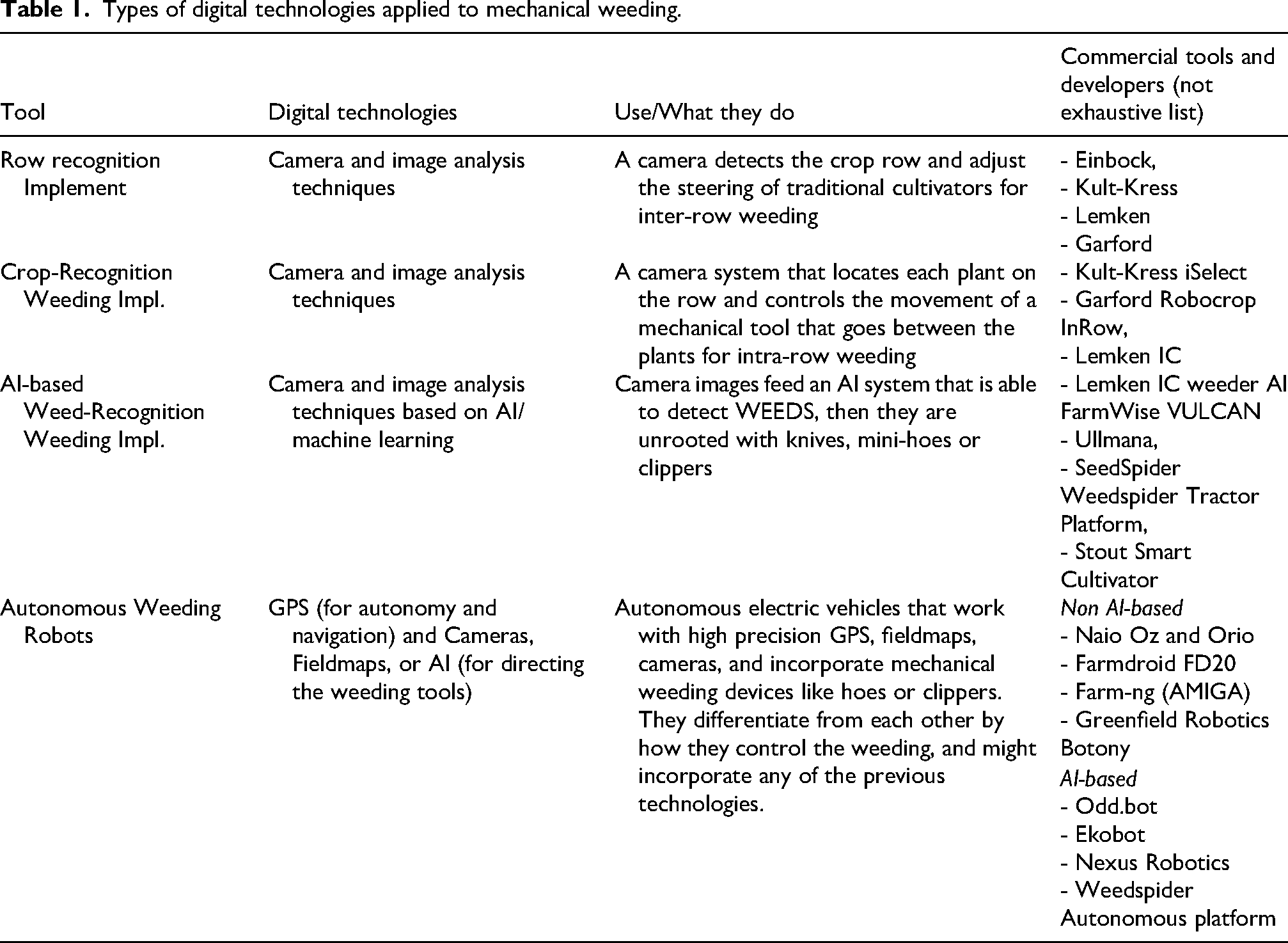
We have observed that digital weeding technologies rely on earlier technologies developed for mechanical weeding. Contemporary designs encode and build upon centuries of solutions to the problem of mechanical weed removal. Finger weeders, tine harrows, and cultivating knives persist as the actual mechanisms that contact and remove weeds, regardless of digital guidance systems (in the same way that precision sprayers still rely on pesticides). In that sense, the digitalization of weeding implements can be seen as a digital “upgrade” where three main technologies are applied to traditional mechanical weeders: row-recognition, crop-recognition, AI-based weed-recognition, and a fourth group, which are autonomous robotics that are based on one or more of the above digital technologies or work with seed maps. This upgrade relates mostly to weed-detecting technologies and increased precision in identifying and targeting the weed. The result is hybrid mechanical–digital weeding tools.
Row-recognition implements are composed of a camera that detects the crop row and adjusts the steering of traditional cultivators for inter-row weeding or blind intra-row weeding. Camera-guided steering implements are not specifically developed for weeding implements; they can also be used in sowing or planting machinery. They are sold as an addition to mechanical hoeing machines/cultivators by the traditional mechanical weeding companies.
Crop-recognition implements are also composed of a camera system. However, it not only detects the crop rows but also locates each plant on the row so that a mechanical tool can go between the plants for intra-row weeding. The cameras detect what looks like a crop after farmers have introduced some parameters, like the distance between plants or crop color.
In the case of AI-based weed-recognition implements, the camera images feed an AI system that is able to detect weeds instead of crops. It is different from the crop-recognition implements in that it recognizes the weeds that can take many different shapes and forms, while the crops are fairly homogenous. The camera recognizes the intra-row weeds and uproots these with hoes or knives (similar to the previous technologies) or pulls them out with clipper-shaped tools.
Weeding robots are autonomous electric vehicles that can perform mechanical weeding work. They can be a lighter and smaller solution, minimizing soil compaction and fitting in narrow beds. While the navigation system of all relies on GPS and field maps, the weeding is done in different ways. Some robots work without a camera. They work based on a field map and “know” where a row is. Other robots work on a combination of seeding and weeding. Here, robots save the exact location of every seed and, based on this, know exactly where each plant is located. There are also robots that rely on cameras for either weed or crop recognition. Thus, the way they use “the digital” for weeding can be different; what makes them into robots is their autonomy.
As the technologies rely on the long tradition of development of mechanical weeding implements, so do they on the corporate actors that have developed those for many decades. Most of the companies that make mechanical weeding implements are family-owned companies that started out as blacksmiths about two centuries ago in countries like Germany or the Netherlands. The “Smiths,” such as Kult-Kress, Treffler, Eïnbock, or Lemken, define themselves as weeding and hoeing experts and are now also at the forefront of experimenting with adding digital technologies to their already existing products. Robotic and AI-based weeding technologies are largely developed by start-ups. Unlike the “Smiths,” these “New kids on the block” are chiefly digital companies. Prominent examples in the EU are Naio, FarmDroid, or Ullmanna. In California “The New Kids on the Block” are highly connected to Silicon Valley (operating in the nearby Salinas Valley, but also connected in terms of background of their workers, or investment), such as the case of FarmWise or Farm-ng.
To sum up, we can see how digital weeding relies on the hybridity of mechanical and digital technology, at the level of the machine (i.e. components, design) and the corporate structure of the sector (traditional mechanical companies and agro-tech start-ups). In this case, technology development is driven by different corporate actors than the more data-extractive digital technologies, like farm management platforms and precision agriculture machinery, such as precision sprayers (Table 1).
Types of digital technologies applied to mechanical weeding.
Human–technology–nature interactions
Digital tech and nature: Disentangling precision weeding
Increased precision is the main promise of digital agricultural technologies (Visser et al., 2021). Precision in digital agriculture is mainly understood as the accuracy of data-based algorithmic forecasting, data-based yield maps, satellite remote sensing, or the measurements of sensors. On the ground, precision in digital weeding is a much more mechanical process: it refers to the ability of the weeding tool to get closer to the crop stem without damaging it. The closer the hoe or knife can get, the more tiny weeds are removed. Reflecting the digital-mechanical hybridity we find in digital weeding tools, the four digital technologies described above reflect different ways to achieve precision.
Row-recognition facilitates or automates steering, which allows for neater rows in seeding and inter-row weeding and thus less damage to crops. Users reported that this can indeed increase the precision of the weeding tools, and it also takes the pressure off farmers to have to very precisely steer their machines in both seeding and weeding, if they want to avoid damaging their crops (Field notes, robot day, community supported agriculture Speisegut, 25.05.2023).
Crop or weed recognition weeding implements take images that are processed through a detection algorithm trained to differentiate weeds from crops. Instead of a blind coverage of the field, the corresponding digitalized mechanical tools either pull out the weeds one by one, slowing down the process considerably, or use weeding knives to facilitate intra-row weeding. However, locating every single weed might be a “solution” for a problem that was already solved by the tine harrow or other mechanical systems working “blind,” especially when combined with the fairly simple digital tool of supported or automated steering. Even from distributors of weeding tools (both digital and non-digital), there is skepticism whether the “ultra-precision” that these AI tools are promising is really needed and to what extent it is an actual advantage over traditional mechanical methods. The efficacy [of AI-based implements] might be higher, but … does going from 85% to 95% removal justify that amount of investment?. (Interview, robot distributor, online, 18.10.23) These [crop recognition] machines are not yet appropriate for seeded crops. We are only at the beginning of a development where we try to work intra-row with seeded crops. (Bayrisches Landwirtschaftliches Wochenblatt 2021 https://www.youtube.com/watch?v = sAuUINRKG2k)
Furthermore, neither robotics nor the other digital implements do help to overcome some of the chief difficulties in weeding, such as the intersection of the weeding tools with irrigation tubes, bird nets, or rocks. Digital weeding technologies rely essentially on the same mechanical tools that have to date been used as weeding implements behind a tractor. That means they fail to remove weeds above a certain size and are helpless against weeds that reproduce underground. Efficient weeding, no matter how it is done, relies heavily on timing and thus on the farmer's knowledge about when to weed and what implements to use. Digital tools, even robots, rely on that knowledge. As one robot user stated at a sectorial fair: The challenge with the robots is that it does not know about environmental conditions. A farmer knows that only by looking at the field. (Testimony from a robot user at an agricultural robotics fair, Toulousse, 07.02.24, recorded as field notes)
How precision works and what benefit it has to farmers is thus a result of the entanglements between digital technology, crop type, crop size, landscape elements such as trees, farm infrastructure, the weeds, as well as farmers’ knowledge. Imprecision is a result of the distinct digital–mechanical hybridity of weeding technology and the interactions with local environmental conditions and farmers’ knowledge. Contrary to what the imaginary around digital technologies often portrays, precision is not an exact science or an unchangeable characteristic of digital technologies, but is highly dependent on timing, local infrastructures, and nature in all its appearances.
Digital tech and humans: Disentangling labor and farming practices in weeding
While we did not find major impacts on labor and everyday farming practices when digitalization was used to “upgrade” traditional mechanical tools, for example, row recognition, farmers who used weeding robots changed their practices considerably. Looking at the advertisement videos of robotic companies, one usually sees a robot gliding smoothly through a level, perfectly neat and straight field. However, farming realities are far messier than that. Robots require a different way of structuring and preparing the farm than other weeding implements do. They need a specific width of rows and enough space to turn at the end of each row. Robots that are not based on image recognition but on a combination of seeding and weeding also rely on prior designed field maps (i.e. virtual representation of the fields’ dimensions) to navigate within the farm (participatory observation, robot day, community supported agriculture Speisegut, 25.05.2023 recorded as field notes). For example, FarmDroid and Naio robots seed the crop along a pre-programmed row that is recorded in a field map. Depending on the type of robot, either the location of each seed is recorded (FarmDroid) or the location of the row (Naio). This then allows the robot to weed at a later stage (FarmDroid weeding around GPS-tracked seeds and Naio weeding “blind” as it uses traditional “blind” mechanical tools, such as tine harrows or finger weeders). In any case, these maps mean an additional step for the farmer that can take up to 4 h for a medium field (Interview, robot distributor, online, 18.10.23). In the case of Naio, the farmer is also not able to program the field maps autonomously. Instead, the farmer needs to send the data to the company that will then provide the field map. As one Naio user reported, this was a major source of stress for him, as seeding, like most agricultural activities, is weather-dependent, and sometimes he needs a map on short notice to be able to seed the next day. His lack of autonomy in this respect added a new source of stress and anxiety (Farmer and Naio Oz user during public debate at robot day, community supported agriculture Speisegut, 25.05.2023, recorded as field notes).
In addition, farmers usually do not have the ability to repair software errors themselves, and even if they have the knowledge, they usually lack the access. Without the possibility of external technical service or self-repairing, relations of dependence are created or re-made between farmers and developers. Phone hotlines are offered to provide support to farmers (e.g. Eïnbock RowGuard Hotline) and products sold, such as premium subscription that include remote monitoring of the robot (e.g. “Uptime Subscription” by FarmDroid). The dependence is increased by the need for software updates, especially on the AI-based tools (e.g. to improve AI models, to include different crop models, etc.) versus the simpler digital amendments added to traditional mechanical tools (e.g. row recognition). Robotics are thus deeply entangled with the set-up of farms and draw farmers into new relationships, in this case with employees at the robotic companies that produce the maps and provide support. This introduces new webs of dependencies in the farming process.
Farmers generally invest in autonomous weeding robots to spend less time on weeding. This can be their own time or often the time of their employees. FarmDroid's website, for example, displays several “customer stories” that relate to the difficulties for farmers to find manual laborers and how the purchase of a robot reduced their need for labor substantially (FarmDroid website, Customer Stories, last accessed 25.01.2026). Yet, inviting a robot to work in your field does not necessarily mean a complete replacement of an agricultural workforce. A FarmDroid user we interviewed said, she was able to reduce the manual labor needed for the weeding of her organic sugarbeets, but was unable to fully replace it with the robot, since the machine did not work precisely enough (Interview organic farmer and FarmDroid user, 08.07.2022, online).
Robot users also deal with frequent errors in using the robot, and a lot of time is taken up trying to fix these errors. The first designs of most commercial robots could not be left unattended at all since they stopped working regularly due to too safety-oriented designs. Up to 60% of the interventions required were from safety systems (Testimony from a robot manufacturer at an agricultural robotics fair, Toulousse, 08.02.24, recorded as field notes). The designs have become better since, but work stoppages due to perceived safety challenges and other issues remain frequent. Especially when work stoppages were related to software errors the farmers could not understand or had no access to, this was perceived as very frustrating (farm worker and Naio Oz user during public debate at, robot day, community supported agriculture Speisegut, 25.05.2023, recorded as field notes; Interview organic farmer and farmdroid user, 08.07.2022, online). Moreover, developers claim that robots can work at night, which means they can also send error codes during the night (e.g. when encountering a rock). This requires farmers and farmworkers to get to the field in the middle of the night if they want the robot to work 24/7 (field notes, robot day, community supported agriculture Speisegut, 25.05.2023). Thus, the common promise of labor saving is not straight-forward. Users tend to acknowledge much more than developers that this technology is still in the making: “Robotics is not magical” (Testimony from a robot user at an agricultural robotics fair, Toulousse, 07.02.24, recorded as field notes).
However, how robotics change farming practices not only relates to robots’ weeding performance, but also to the relationship and trust farmers and farmworkers build with the robot. Workers on a farm that produced high-value vegetables reported that they used the Naio Oz robot for seeding, however, they do not leave the robot to do this by itself. One member of the team constantly stays with the robot to supervise and react quickly if it makes a mistake. They also refused to use the robot for its main function, weeding, since they did not trust that the robot would not ruin the delicate vegetable plants (farmworker and Naio Oz user during public debate at, robot day, community supported agriculture Speisegut, 25.05.2023, recorded as field notes). Trust in robots has been a major issue across our interviews. “the client needs to understand what the robot does and how it does it in order to develop trust” (Interview, robot distributor, 19.04.2022). More tech-savvy farmers and farmworkers we talked to tended to trust the robots more and left the robots to work the fields without constantly monitoring them in person. While less tech-savvy farmers and workers perceived the robot as an unpredictable “black box,” with behavior they did not understand and did not have the competencies to change (Interview organic farmer and FarmDroid user, 08.07.2022, online; conversation with farmer, during public debate at, robot day, community supported agriculture Speisegut, 25.05.2023, recorded as field notes; conversation with farmer during public online debate hosted by Agrarbündnis, 22.09.2025, recorded as field notes).
The robot users we talked to do nonetheless see certain benefits with regard to the quality of work in agriculture. These machines are a lot quieter, and repairing the mechanical parts needs less manual force than working on the big tractors. And if they work well, they do replace a substantial amount of the hard manual labor of weeding (Interview organic farmer and FarmDroid user, 08.07.2022, online; Farmer and Naio Oz user during public debate at, robot day, community supported agriculture Speisegut, 25.05.2023, recorded as field notes). Permanent employees on farms were also described as having developed a new digital skillset, which allowed them to become the key “caretakers” of the robots and thus changed their tasks on farms considerably. “This (the use of robotics) only works because I have a few employees who really got into this digital tinkering. They love doing this, and now it is their main job on the farm” (conversation with farmer during public online debate hosted by Agrarbündnis, 22.09.2025, recorded as field notes). Robots were also described as more relatable than large agricultural machinery. They were often talked about as animal-like co-workers and unlike their weeding implements, farmers and farmworkers repeatedly named the robots. We encountered “Robi,” “Stefan,” “Gabriele,” or “Rubi” during our fieldwork (Interview, robot distributor, 19.04.2022; online; robot day, community supported agriculture Speisegut, 25.05.2023, recorded as field notes; Interview, robot developer, 13.12.2021). This points to a different emotional and work relationship with this particular technology, which is also reflected by robot developers. You have to work a lot with psychology, people are afraid of these things, and that's why we built ours to look very friendly, so that at least the first contact is possible. Sizes play a role, colors play a role, and as I said, it has to be very communicative, you have to have the feeling as an operator that I know at all times what is planning or what is doing. And it has to be easy for me to tell it what I want. (Interview, robot developer, 13.12.2021)
This points to the entanglement of trust, human knowledge, experiences, and emotions into human–technology relationships in the weeding process. Whether robotics can really reduce the time and work needed for weeding depends not only on the robots’ performance, but also on the way farmers and farmworkers engage with the machine. However, unlike the digital surveillance technologies described elsewhere as digital Taylorism on the farm, the case of digital weeding points to the potential that digital technologies can also enhance work quality in agriculture.
Discussion
Our analysis of digital weeding technologies offers new insights into several important debates. We structure the contribution around five specific issues. First, our findings complicate dominant narratives in the political economy literature that emphasize expanding corporate power of the major agri-food input producers and data extraction as the defining features of digitalization (Clapp, 2025; Hackfort et al., 2024; Prause et al., 2021). While these critical analyses provide essential insights into corporate forces reshaping agri-food systems through digital technologies, the case of digital weeding reveals alternative technological trajectories that diverge from platform-based, data-centric models. Digital weeding technologies represent what we might call a “mechanical–digital hybrid” pathway that shows path-dependency and gradual development of digital technologies in line with historical theory of technology arguments. The continuity between mechanical and digital weeding contradicts techno-optimistic narratives that present agricultural robotics as revolutionary departures.
This technology development path is dominated not by Big Tech and Big Ag firms but led by mid-sized, often family-owned machinery manufacturers (the “Smiths”) and specialized robotics start-ups (the “New Kids on the Block”). The “Smiths” operate according to different business models than the Big Ag corporations analyzed by Clapp (2025), Prause (2021), or Bronson (2022). They sell equipment rather than data services, and their value capture strategies center on hardware sales, service contracts, and incremental technological improvements rather than on extracting and commodifying farm data. We are not naïve to think that this scenario is totally independent from the Big Ag corporations’ influence (Fairbairn and Reisman, 2024), yet we see, for the mechanical weeding realm, a different digitalization pathway. Carolan (2022) distinguishes between “strong and weak data,” noting that not all platforms are based on the same data assemblages and can do very different things. Digital weeding exemplifies weak data approaches that use digital sensing for immediate mechanical actuation without necessarily generating extractable data streams, thus representing a different relationship between farmers and digital tech providers. Nevertheless, new dependencies are introduced through software support requirements and field mapping services (as with Naio's centralized mapping) that lock farmers into a relationship with the robotics providers.
Second, a major topic in the political economy debate around digital agriculture and digital capitalism more generally is labor relations. Against claims that digital technologies will replace farm labor, we found only partial displacement: robots reduced but didn’t eliminate manual weeding labor, and they created new forms of work around robot supervision, troubleshooting, and maintenance. Others have argued that digital technologies inherently intensify labor processes and control (Prause, 2021, 2025; Siegmann et al., 2024), yet we found more ambiguous dynamics: robots did reduce physically demanding hand-weeding, which users appreciated, but they also introduced new stresses around software dependencies and nighttime error alerts. Our findings support Prause’s (2021) and Nettle and Ingram's (2025) argument that agricultural automation doesn’t straightforwardly reduce labor but reconfigures it, shifting from direct production activities toward technology supervision and troubleshooting. Our case shows that robotics has the potential to enhance work quality and even workers’ autonomy, if they have a specific digital skill to manage the robot that the farm manager relies on, which also challenges broader assumptions about the increased control and surveillance of workers in digital capitalism (Altenried, 2022). Yet, the distributional implications of this reshaping are not politically neutral. The replacement of migrant workers (who perform manual weeding) with skilled employees and farmers, who remain necessary for robot supervision, represents a reconfiguration that could exacerbate existing inequalities in agricultural labor markets. This resonates with concerns raised by Rotz et al. (2019) about how agricultural automation may disproportionately affect the most precarious workers while concentrating benefits among farm owners and skilled employees.
Third, perhaps our most surprising findings concern the emotional and relational dimensions of human–robot interaction in agricultural contexts. Farmers and farmworkers naming robots, describing them as animal-like co-workers, and developing affective relationships with machines suggest dynamics that the agricultural digitalization literature has largely overlooked but that resonate strongly with research on human–robot interaction outside agriculture. The robot developer we interviewed explicitly discussed designing “friendly”-looking robots to facilitate positive first impressions. This aligns with findings from social robotics showing that robot appearance influences human emotional responses and willingness to interact (Fong et al., 2003). The “cyborg farmer” concept developed by Velden et al. (2023) captures the entanglements of farmers and digital technologies well, but focusing on the use of sensors, it falls short on addressing the emotive components that the work with autonomous machines can have. More than 15 years ago, Sherry Turkle (2011) already described the emotional bonds kids developed with their toy pet robots. Rather than “cyborg farmers,” we might see new relationships between farmers/farmworkers and robots evolve, where robots are referred to and emotionally treated in a similar way to farm animals. The relational and emotional dimensions we observed suggest a different pathway for human–robot collaboration than the “liberatory imaginary” (Baur and Iles, 2023) of robots as labor replacements. Rather than robots simply substituting human workers, our findings suggest possibilities for cooperative human–robot configurations where robots become integrated into farmer and farmworker identities and practices.
Finally, our analysis contributes to the emerging literature on embodied practices and technological assemblages in precision agriculture by demonstrating how “precision” itself is not a stable technical property but an emergent outcome of technology–human–nature entanglements. More fundamentally, our results challenge how precision itself is conceptualized in precision agriculture discourse. The literature has largely understood precision through the lens of data-driven input optimization, using sensors, maps, and big data analytics to vary fertilizer, pesticide, or irrigation applications spatially and temporally (Clapp and Ruder, 2020; Miles, 2019). Visser et al. (2021) uncover how uncertainties in big data can produce imprecision. We extend this critique by demonstrating that also in applications not based on big data analytics, but on the digital-mechanical hybridity of weeding technologies, precision is not a fixed technical capacity but emerges through assemblages. Following the works on assembling digital agriculture through practices and embodied knowledges of farmers (Velden et al., 2023), we can understand precision in digital weeding as co-produced through the mutual entanglement of technological affordances, ecological conditions, and farmer knowledges. A robot's capacity to weed “precisely” does not inhere in the machine but materializes (or fails to materialize) through interactions with slope gradients, soil moisture, rock distributions, irrigation infrastructure, weather conditions affecting sensor performance, and crucially, farmers’ embodied knowledge and their decisions about when to deploy the technology. Despite aspirations toward “farming without weeds” (as promoted on robotics company websites), nature's materiality continually exceeds technological control systems. This resonates with Visser et al.’s (2021) analysis of how precision agriculture attempts to make nature legible while simultaneously encountering nature's resistance to complete rationalization.
Last, our study demonstrates the value of integrating political economy and assemblage-based theoretical frameworks rather than treating them as competing alternatives. This integration is made possible by attending to technological specificity. The distinct developmental histories of particular artifacts, together with an understanding of these artifacts being part of human–nature–technology assemblages, provide an analytical bridge between political economy and practice-oriented scholarship. This specificity matters because policy and scholarly debates sometimes tend to treat digital agriculture generically and precision farming monolithically. Our findings suggest this obscures crucial differences with implications for regulation, farmer support, and equitable access.
Footnotes
Acknowledgements
We thank the editor and the three anonymous reviewers for their constructive comments. A preliminary version of this paper was discussed in a monthly workshop of the Science and Technology Studies of Food and Agriculture Network (STSFAN). The feedback from that discussion was key to building this article in its current form.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work contributes to the project DEMO (TED2021-132205A-I00), and to Lucia's Juan de la Cierva fellowship (IJC2020-045101-I) granted by the Spanish Ministry of Science, Innovation and Universities. This publication is part of the 2021 SGR 00975 project funded by the Department of Research and Universities of the Generalitat de Catalunya. In addition, this work was supported by the BMBF as part of the funding line “Bioeconomy as Societal Change” FKZ 031B0750.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Appendix
Table 2 shows the number of actors interviewed in each country.