
Abstract
An integrated algorithm to spectrally match two seed-recorded horizontal bi-directional ground motion components to a maximum-direction response spectrum (RotD100) while maintaining the radial spectral acceleration pattern (RadSAP) at target natural periods is presented. The algorithm is based on the complex-discrete-Fourier-transform (CDFT) and iterative manipulation of the seed-recorded bi-directional ground motions. Initially, a population of candidate bi-directional ground motion pairs is generated, and the candidate resulting in the minimum error in RadSAP is picked. Subsequently, the CDFT coefficients of the picked bi-directional ground motion near the target natural periods are rotated to modify the orientation angle, which contributes to the modification of RadSAP. Then, a double iterative method is introduced to modify the bi-directional ground motion after CDFT coefficients rotation to be spectral and envelope shape compatible in the frequency and time domain. In order to show the effectiveness of the proposed algorithm, two target response spectra are determined following the current ASCE/SEI 7-16 and CJJ 166-2011 specifications, and 10 bi-directional ground motions are selected based on the resemblance in response spectrum for each target spectrum. It is shown that with the proposed algorithm, the RotD100 response spectra estimated from the modified bi-directional ground motions closely match the smooth target RotD100 response spectrum, and the RadSAPs at these target natural periods show an improved match with the seed-recorded bi-directional ground motions than the previous version method. Furthermore, the waveforms of the results obtained using the proposed method are similar to that of the scaled seed records in terms of acceleration, velocity, and displacement. Thus, the generated bi-directional ground motions can be used for future seismic risk assessment of buildings considering the directionality effects.
Keywords
Introduction
The continuous improvement in the capability of modern computers has increased the importance and utility of dynamic analyses in designing new structures or evaluating the expected performance of existing structures. Therefore, the availability of accelerograms that meet specific requirements is a widespread concern, especially when dealing with designing or evaluation facilities of critical importance or structures incorporating non-conventional means of protection against seismic hazard (e.g. seismic isolation (Tan et al., 2023), energy dissipation devices (Shen et al., 2022, 2023), rocking piers (Zhou et al., 2022)). For this purpose, accelerograms whose response spectra are similar or envelope the target response spectrum are required. Spectral-compatible accelerograms have received great popularity in seismic design (Naeim and Marshall, 1995), and different spectral-compatible models have been proposed (e.g. Cacciola et al., 2004; Gasparini and Vanmarcke, 1976; Iyengar and Rao, 1979; Kaul, 1978; Zentner and Poirion, 2012). However, most existing response spectral matching techniques are for unidirectional ground motions. This seems to be no problem when it is assumed that the performance of the lateral-load-resistant structure can be decoupled in two orthogonal directions. In this case, a two-dimensional (2D) numerical model can be applied to analyze the seismic performance under unidirectional ground motions. However, there are undoubtedly structures that couple in two orthogonal directions, such as skewed or curved bridges. In this case, the usage of bi-direction ground motions is required.
Several simple measures have been proposed to simplify the intensity of bi-directional ground motions (e.g. Boore, 2010; Boore et al., 2006; Campbell and Bozorgnia, 2014; Chiou and Youngs, 2014; Power et al., 2008). The RotDpp was proposed by Boore (2010) as an alternative measure of horizontal components’ seismic intensity that represents any percentile consistently without computing geometric means that are also independent of the orientation of the recording sensors. RotD50, which provides a measure of median horizontal intensity, is selected as the measure of horizontal component seismic intensity in the NGA-West2 project (Bozorgnia et al., 2014). It is widely used as the target spectrum to generate bi-directional ground motions for seismic input (e.g. Fayaz et al., 2021; Fayaz and Zareian, 2021). Also, the latest generation of seismic maps in the United States is based on probabilistic seismic hazard analyses using this parameter (Petersen et al., 2020). However, since the spectral ordinates corresponding to the maximum component (i.e. RotD100) are substantially larger than the median intensity (i.e. RotD50 or GMRotI50; Huang et al., 2008; Poulos et al., 2022; Poulos and Miranda, 2022a), the values of the seismic design parameters of many codes are all defined in terms of RotD100 in the horizontal plane (e.g. ASCE/SEI 7-16, 2016; Federal Emergency Management Agency (FEMA) P-2082-1, 2020; International Building Code (IBC), 2018). The RotD100 is becoming a widely accepted intensity measure for bi-directional ground motions. Accordingly, several methods have been proposed to modify the seed-recorded bi-directional ground motions to be compatible with the target RotD100 response spectrum. Thangappa (2019) used “match and scale” to generate target RotD100 response spectrum compatible bi-directional ground motions by continuous wavelet transform (CWT). Montejo (2021) also used the CWT to combine the ground motions with the input wavelets. The computational efficiency of this method was improved by performing the wavelet decomposition and details construction through fast convolutions using the fast Fourier transform, which benefits from that convolution in the time domain is equivalent to multiplication in the frequency domain.
Recently, the importance of correctly reproducing the natural property of the seed-recorded bi-directional ground motions (e.g. peak ground acceleration (PGA), cumulative absolute velocity (CAV), and arias intensity (AI)) has been emphasized (Kwon and Elnashai, 2006; Li et al., 2017; Masi et al., 2011; Nanos and Elenas, 2006; Zentner and Poirion, 2012). However, little attention has been paid to the directionality difference between the modified and seed-recorded bi-directional ground motions. The normalized radial spectral acceleration pattern (RadSAP), which is defined as the radial response spectral value normalized by the maximum response spectral value (i.e. RotD100), and the orientation angle (OA) that the direction in which RotD100 takes place work together to show the directionality of bi-directional ground motions. These two parameters (RadSAP and OA) are influenced by the fault type and source geometry properties and are suitable refractors for showing the orientation variation property of bi-directional ground motions (Dwivedi et al., 2022). In a seismic analysis, the orthogonal bi-directional ground motions are usually applied in the major axes of the investigated structure. However, several studies demonstrate the inadequacy of seismic analysis to capture the “true” seismic demand when only one incidence angle is considered. Thus, researchers tend to evaluate the maximum seismic demand under bi-directional vibration by simultaneously applying orthogonal components along the X- and Y-axes, which are then gradually rotated around the Z-axis at an interval angle (Feng et al., 2018; Magliulo et al., 2014). Such a procedure is inevitable when the orientation variation property of bi-directional ground motions is unknown, which is time-consuming. While placing structures at orientation corresponding to the minimum RadSAP can safeguard their vulnerability from higher ground motions intensities (Dwivedi et al., 2022). Hence, it is better to maintain the realistic OA and the RadSAP with the seed-recorded bi-directional ground motions in their elastic spectral response (Grant, 2011). In this context, there is a need to propose a new method that can modify the seed-recorded bi-directional ground motions compatible with the target response spectrum while maintaining its OAs and the overall shape of RadSAPs.
In the open literature, only a few studies reported the property of RadSAP of bi-directional ground motions (Montejo, 2021; Poulos and Miranda, 2022b; Rivera-Figueroa and Montejo, 2021). The methods proposed by Thangappa (2019) and Montejo (2021) can generate RotD100 spectral-compatible bi-directional ground motions whose RadSAPs are not significantly affected. However, these methods do not explicitly try to preserve the OA and RadSAP. Nevertheless, as per the authors’ knowledge, no work has been conducted so far specifically on the development of a new method to maintain the OA and RadSAP with the seed-recorded bi-directional ground motions. Fortunately, the rotary spectral analysis (Chiba, 1985; Chiba and Kimura, 1970; Gonella, 1972; Walden, 2013), which is widely used in the study of the motion of the atmosphere and ocean as well as in the field of determining the spatial variation of seismic motions, provides a tool for tackling such an issue. Its theoretical basis is the complex-discrete-Fourier-transform (CDFT). And it is used to decompose the vector motions into a set of rotating ellipses at separate frequencies. Gonella (1972) used this method to investigate the coupling between wind and surface current in the Atlantic Ocean. Chiba and Kimura (1970) did the rotary spectral analyses using accelerogram data observed using a dense seismometer array to assess whether a new set of seismometers was in the correct position or not.
Recognizing the importance of OA and RadSAP in seismic analysis, it is necessary to maintain the OA and RadSAP after spectrally matched to the target RotD100 response spectrum. In other words, in addition to being spectral-compatible, the OA and RadSAP of seismic input should also be sought. In this article, a new algorithm is proposed to modify the seed-recorded bi-directional ground motions to be compatible with the target RotD100 response spectrum while maintaining its overall shape of RadSAPs at the target natural periods. First, a population of candidate bi-directional ground motion pairs is generated using the seed-recorded bi-directional ground motions. Then the greedy algorithm is adopted to pick the bi-directional ground motion pair producing the minimum error in RadSAP while compatible with the target RotD100 response spectrum. The picked bi-directional ground motion pair is treated as a complex signal using CDFT. The CDFT coefficients are modified to maintain the OAs with the seed-recorded bi-directional ground motion, which also contributes to the maintenance of the overall shape of RadSAPs. It is shown that this methodology can produce spectrally matched bi-directional ground motions to a target RotD100 response spectrum while maintaining its overall shape of RadSAPs at given target natural periods. It is the intent of this article not only to give a method that maintains the overall shape of RadSAPs at specified natural periods but also to make a preliminary exploration in the field of directionality of bi-directional ground motions.
Problem formulation
Orientation angle and radial spectral acceleration pattern
The intensity of horizontal earthquake ground motions varies with the orientation azimuth. Horizontal ground motions are almost always recorded in two orthogonal directions, represented by X and Y axes as shown in Figure 1a. And the two orthogonal ground motion components can be combined into a single acceleration time history corresponding to a specific orientation azimuth θ using the following equation:

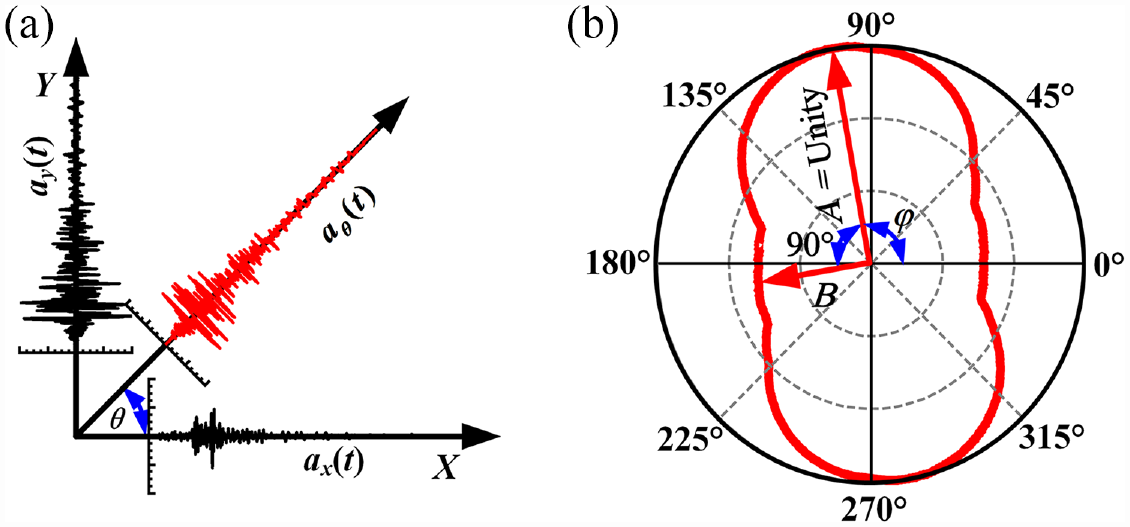
(a) Illustration for
Then the response at a specific period T for the single acceleration time history

where

After that, the RadSAP can be determined by normalizing

Figure 1b shows the plot of RadSAP with a natural period of 0.1 s of the example bi-directional ground motion of Figure 1a. In this work, the angle

Also, it has to be mentioned that the set of the two single time series
Previous version of the RotD100 response spectral matching technique
The CDFT can calculate the Fourier transform of two real-valued ground motion records of N discrete-time sample points simultaneously by assigning one record x(n) as the real part and the other record y(n) as the imaginary part of a complex-valued record z(n) (Bendat and Piersol, 2011). In the equation form, it is given by:

where i is the symbol of imaginary unit. CDFT of the record z(n) is given by Equation 7:

where

It is usually assumed that the first N/2 of the N CDFT coefficients

where
Previous version of the spectral matching technique.
The iterative process may be concluded when j reaches the maximum iteration number
Problems using the previous version of the spectral matching technique
The previous version of the spectral matching technique can modify the seed-recorded bi-directional ground motions to be compatible with the target RotD100 response spectrum. However, something undesired may happen. Two of these are the change of OA and RadSAP. The seed-recorded bi-directional ground motion in Figure 1a was spectrally matched to the target response spectrum using the previous version method. The comparison between the target and estimated response spectra before and after modification is shown in Figure 3a. It can be seen that the previous version method is effective in modifying the bi-directional ground motion to be spectral-compatible with the target spectrum regardless of the original RotD100 response spectrum. Figure 3b gives a comparison in RadSAP with a natural period of 0.1 s before and after spectral matching. It is found that the OA changes from
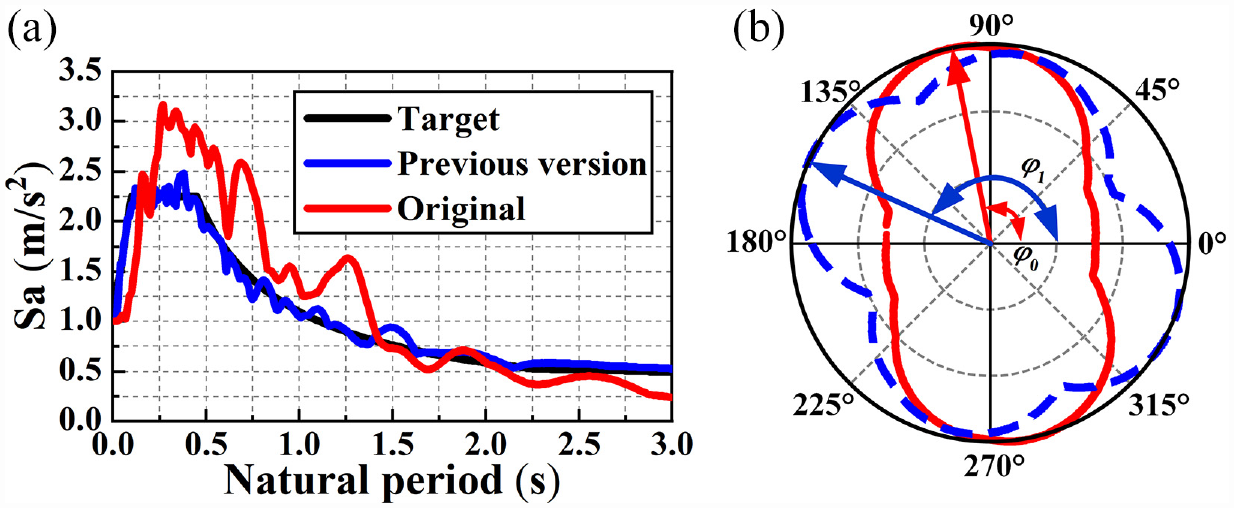
(a) Response spectra comparison and (b) illustration of RadSAPs with a period of vibration of 0.1 s.
In this study, the object is to minimize the error of RadSAP between the recorded and the modified spectral-compatible bi-directional ground motions at given target natural periods

where
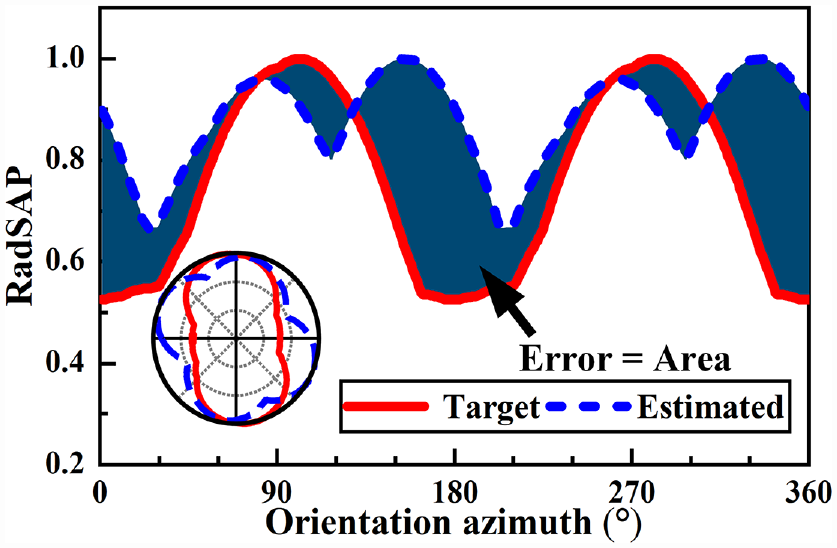
Definition of error.
Theoretical basis
Property of CDFT
The CDFT coefficient

where a and b are the real and imaginary parts of the Fourier coefficients of x(n) and y(n), respectively;

Note that the component of

where C+ and C− are the CDFT coefficients

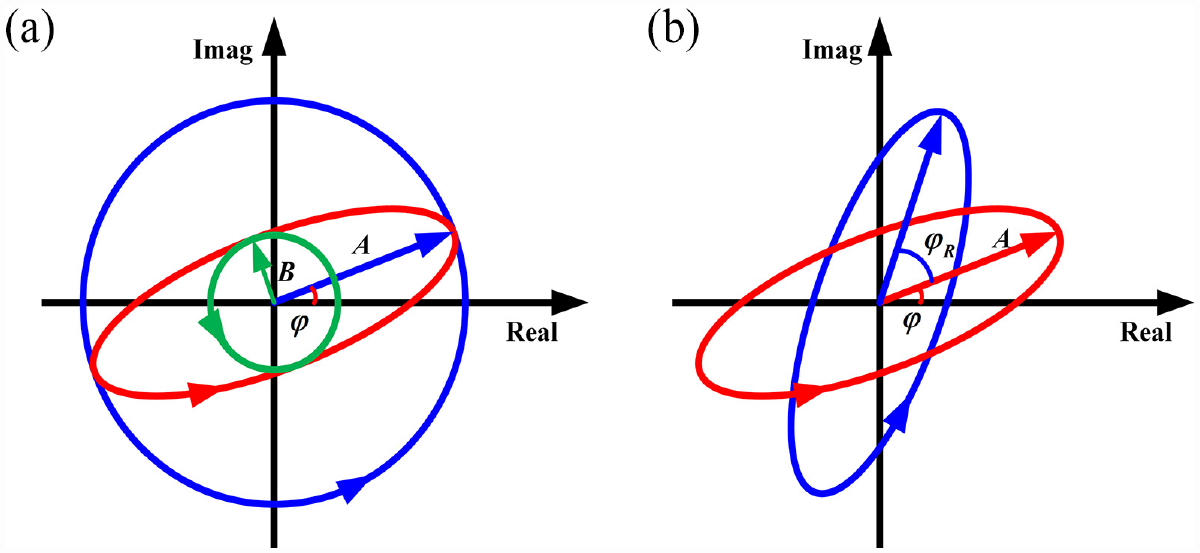
(a) Geometrical properties of the ellipse and (b) rotate the orientation azimuth of the ellipse by angle φR.
Furthermore, the orientation azimuth, the angle which the major axis of the ellipse makes with the real axis φ can be determined as:

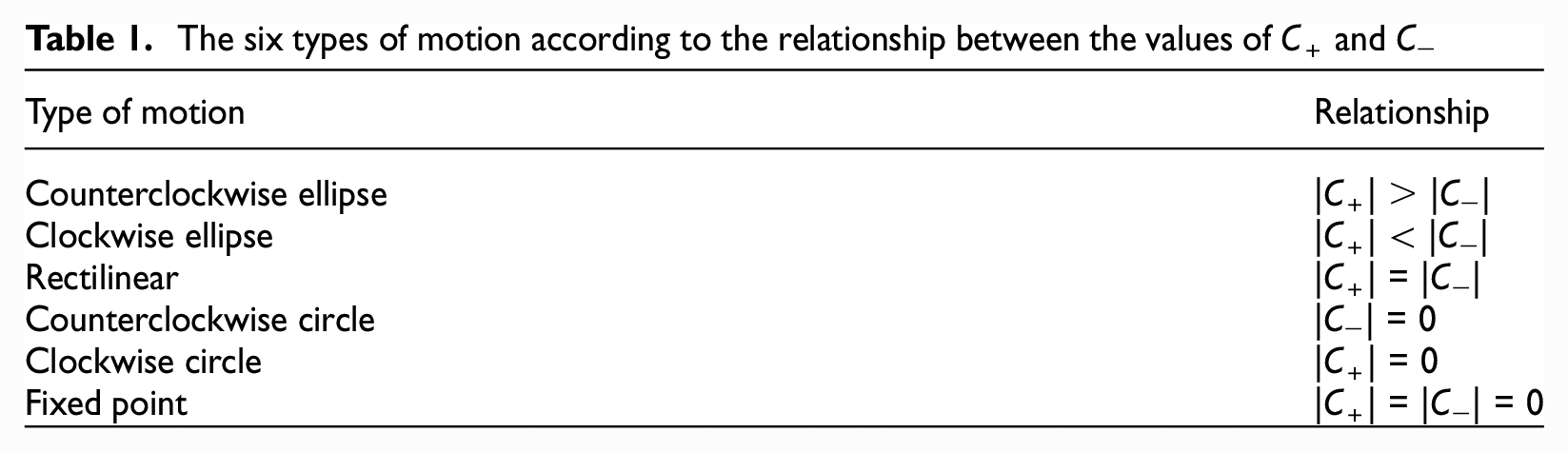
Given the values of C+ and C−, the six types of motion of the ellipse resulting from C+ and C− are given in Table 1.
The six types of motion according to the relationship between the values of C+ and C−
Rotate the orientation azimuth of ellipse by angle φR
If the ellipse is rotated by an angle φR, the relationship between the CDFT coefficients before and after rotation can be determined using the rotation matrix:

It is convenient to present the coordinates before rotation in the complex plane as:

Thus, the coordinates after rotation can be given by:

where E = C + + C−, F = C +–C−. Again, by presenting the coordinate after rotation in the complex plane, one obtains:

By comparing Equations 13 and 19, it is found that if the orientation of the ellipse is rotated counterclockwise by angle φR, one can multiply the CDFT coefficients before rotation by
This section is the foundation for the OA modification for the proposed algorithm. Considering a single-mass-two-degree-of-freedom (SMTDOF) system with a natural period

Envelope shape modification of ground motions with rotated CDFT coefficients
Previous studies find that the envelope shape of an earthquake motion has a close correlation with the distribution of phase differences (Ohsaki, 1979). And the phase information from observed records can be used to simulate ground motions with different types of source and propagation characteristics (Yamane and Nagahashi, 2008). However, in this study, the rotation of CDFT coefficients will change the phase difference in the bi-directional ground motions, resulting in a different envelope shape that may not be as realistic as the actual ground motions. The velocity and displacement time histories are obtained by single and double integration of accelerogram with respect to time once and twice, respectively. Therefore, the envelope shape of the accelerogram can affect the velocity and displacement time histories. For example, a more gradual acceleration can lead to a larger displacement time history compared to a sudden or impulsive acceleration. Thus, it is necessary to modify the envelope shape of the bi-directional ground motions with rotated CDFT coefficients. The simplified approach proposed by Li et al. (2017) for AI correction of unidirectional synthetic accelerograms is used for the bi-directional ground motions in this study. The energy distribution

Then, the multiple-times short-window moving average method is adopted to obtain a smoothed energy distribution

where j = 0, 1, …, and
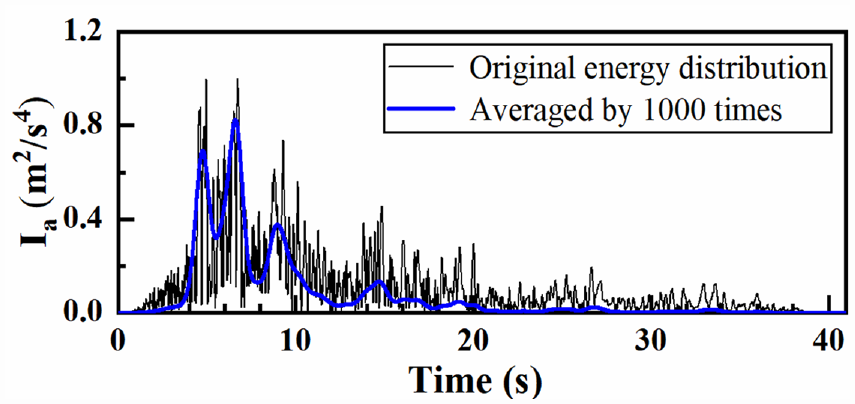
Example of the MSMA method.
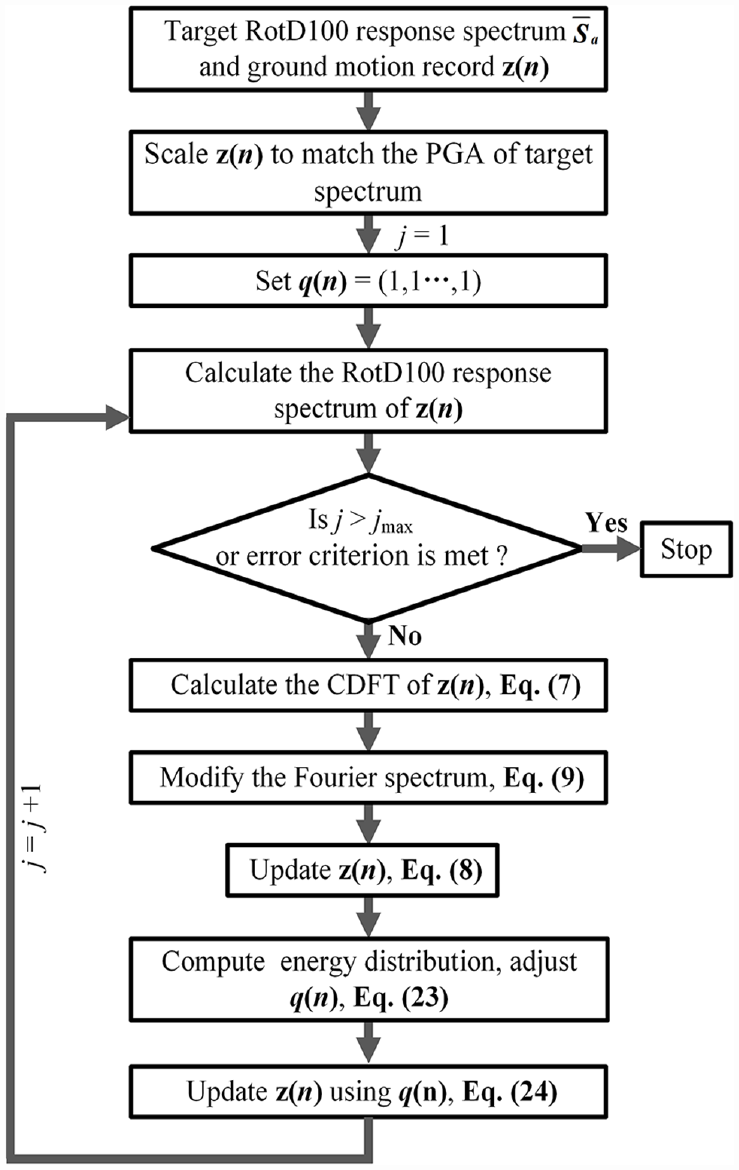
Similar to the response spectral matching technique, the envelope shape

where

This double iterative algorithm is illustrated in Figure 7 and is used for the picked candidate bi-directional ground motion in the following section to achieve spectral compatibility in the frequency domain and envelope shape compatibility in the time domain.
Algorithm to achieve spectral-compatible and envelope shape compatible for the picked candidate.
Candidates generation and greedy algorithm
Many methods can generate RotD100 spectral-compatible bi-directional ground motions, such as the combination of modulated sinusoidal waves and time-domain wavelet-based approach. However, these methods cannot guarantee the resemblance of the overall shape of RadSAP with the seed-recorded bi-directional ground motions. The method proposed by Montejo (2021) directly pursuing the match of RotD100 by simultaneously modifying both seed-recorded horizontal components does not significantly change the overall shape of RadSAP. Thus, the seed-recorded bi-directional ground motions are directly used to generate the population of candidate bi-directional ground motions. In order to generate the candidates, the normalized response spectrum (NRS) at each orientation azimuth is proposed. For each orientation azimuth θ, there is a single time series

Figure 8 shows an example of
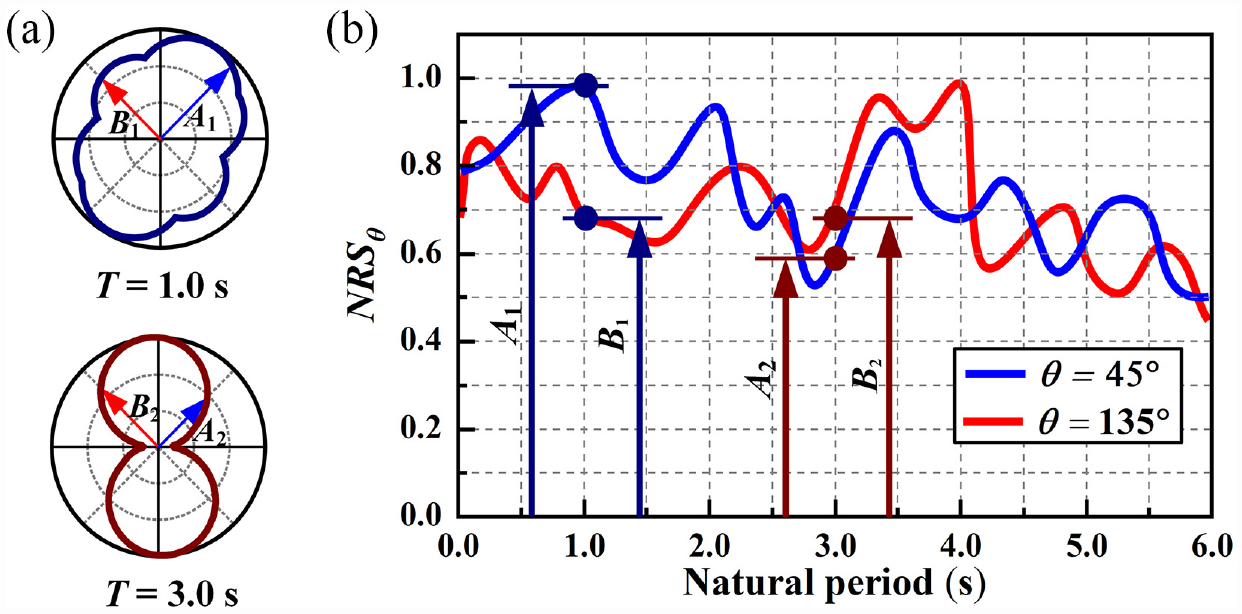
(a) RadSAPs at T = 1.0 s and T = 3.0 s and (b) normalized response spectrum at a given angle: θ = 45°, and 135°.
The target response spectrum pairs at each orientation azimuth θ can be determined by scaling the target RotD100 response spectrum using the normalized spectrum pair

Then, each component of the 90 bi-directional ground motion pairs defined in the previous section is spectrally matched with the corresponding target response spectrum using the real-valued Fourier transform at each orientation azimuth, separately. Obviously, this cannot guarantee that the estimated RotD100 response spectrum of the generated bi-directional ground motion pairs will match exactly the target RotD100 response spectrum. Nevertheless, this bi-directional ground motion pair can be appropriately modified to improve the agreement of its RotD100 response spectrum with the target using the previous version method. Figure 9 shows the flowchart to create the candidate bi-directional ground motion pairs. Attention is needed that because the bi-directional ground motion pairs are processed simultaneously, the range of θ becomes
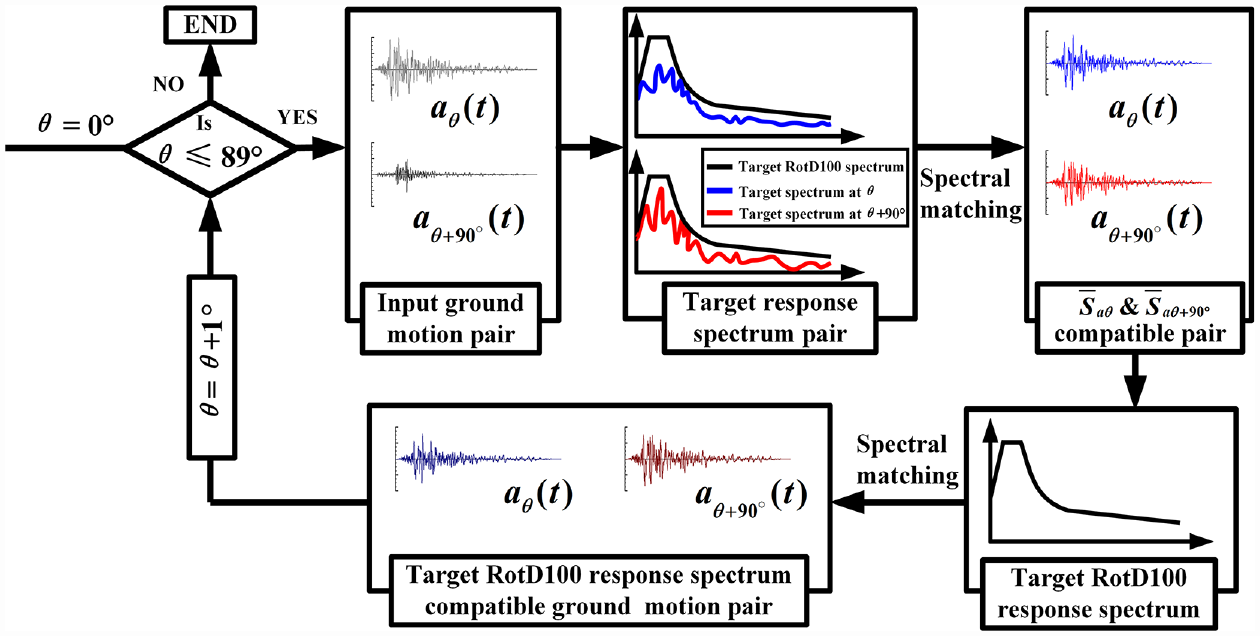
Flowchart of producing bi-directional ground motion pair candidates.
In the end, the greedy algorithm is used to pick the bi-directional ground motion candidate with the minimum error in RadSAPs. The greedy algorithm follows the problem-solving heuristic of making the locally optimal choice at each stage (Pieterse and Black, 2005). In many problems, a greedy strategy does not produce an optimal solution. However, a greedy heuristic can yield locally optimal solutions that approximate a globally optimal solution in a reasonable amount of time. Nevertheless, the greedy optimization technique was used by Jayaram et al. (2011) to improve the match between the target and the sample response spectrum mean and variance by replacing previously selected with that causing the best improvement. It was shown empirically that this selection algorithm could produce a set of ground motions whose response spectra have the target mean and variance. Due to the complexity of the problem, in the following section, the greedy algorithm is used to pick the bi-directional ground motion candidate with the minimum error in RadSAP.
The proposed algorithm
The objective of the proposed algorithm is to generate the bi-directional ground motion pair that is compatible with the target RotD100 response spectrum while having the minimum error in RadSAPs with the seed-recorded bi-directional ground motion at the target natural periods. This leads to a minimization problem which can be cast as:

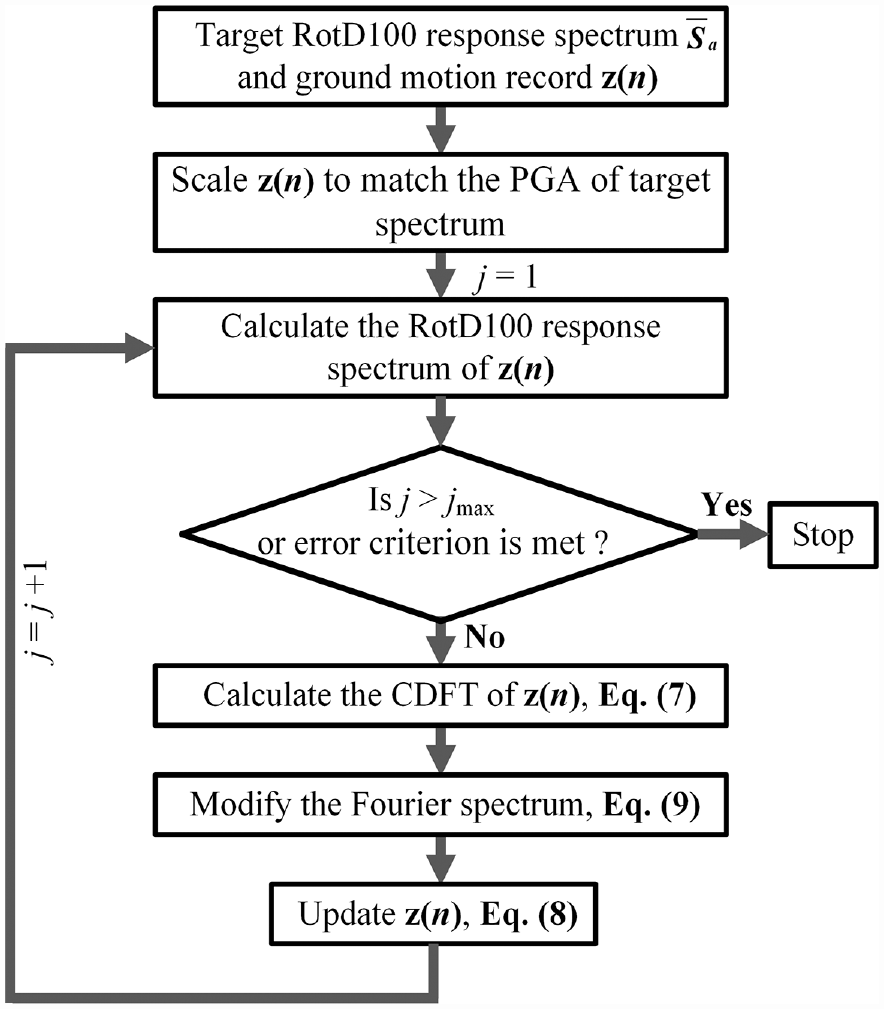
Based on the developed theoretical basis, the algorithm described below is proposed and illustrated in Figure 10.
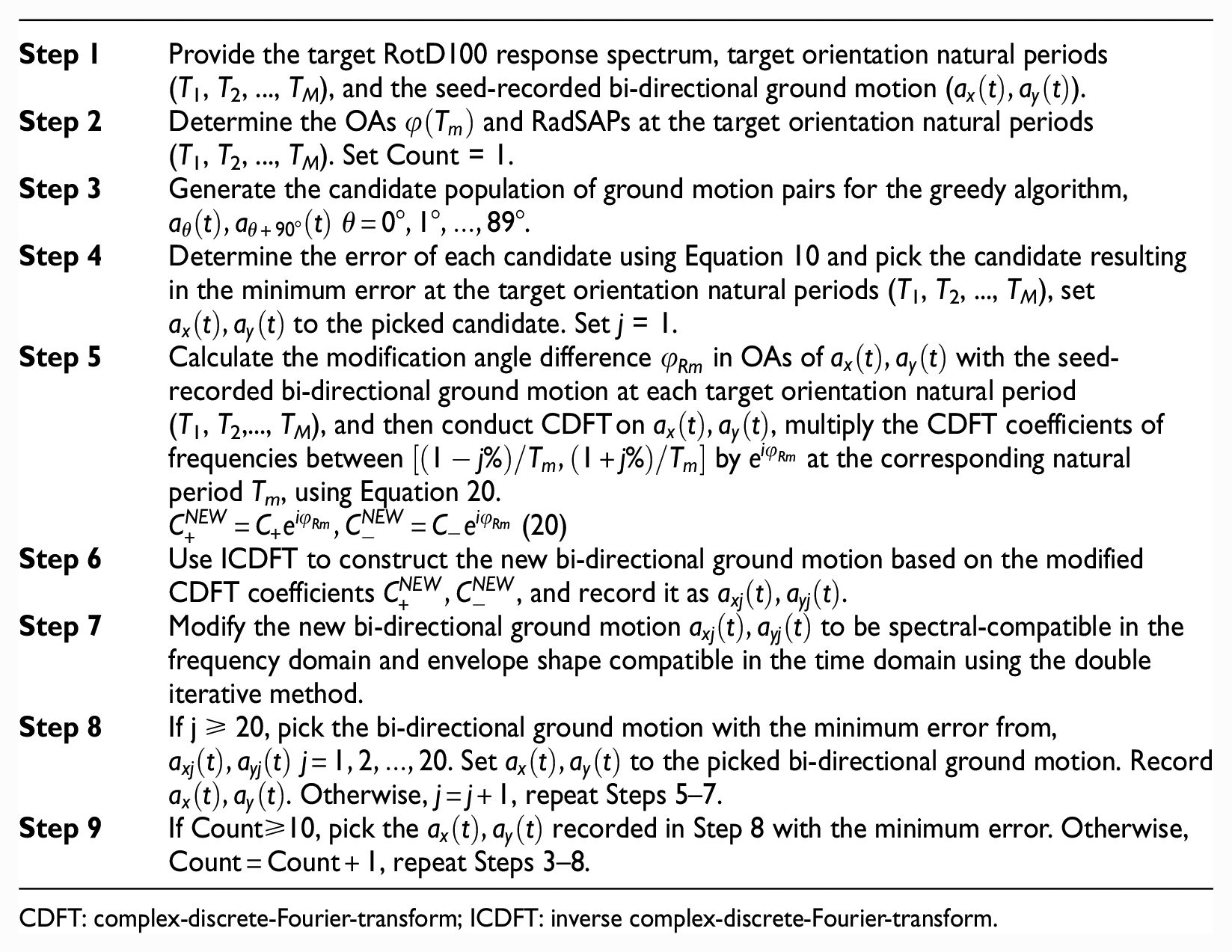
CDFT: complex-discrete-Fourier-transform; ICDFT: inverse complex-discrete-Fourier-transform.
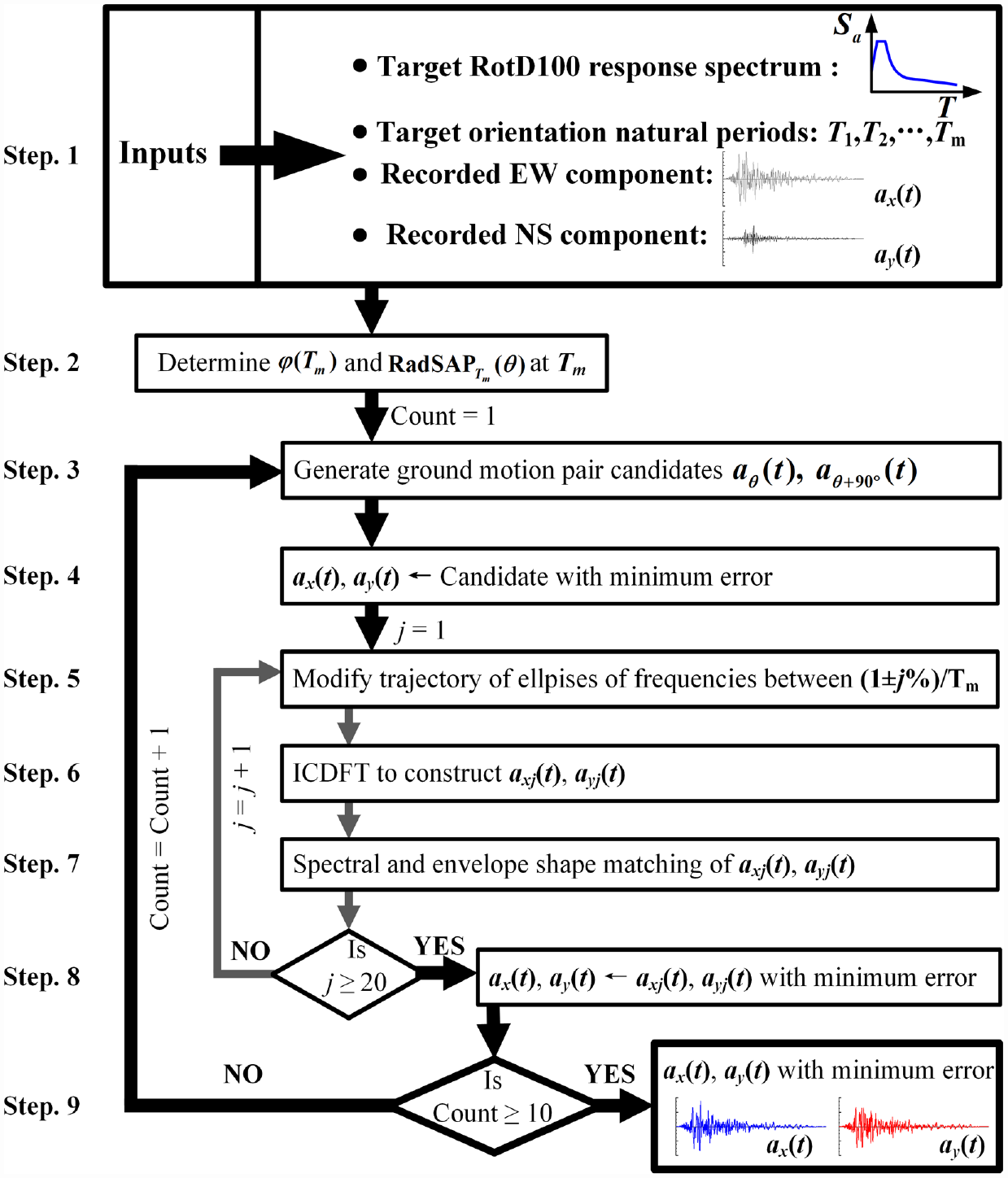
Illustration of the proposed algorithm.
In this algorithm, the CDFT is used to modify the picked bi-directional ground motion pair to be compatible with the target RotD100 response spectrum, and the rotation of CDFT coefficients is adopted to adjust the OA for each target natural period, which also contributes to the RadSAP modification. While the index j in the inner loop controls the frequency band of the CDFT coefficients near the target natural periods, ranging from ±1% to ±20%. The maximum frequency band of ±20% is a compromised choice due to the fact that the response of a SMTDOF will be mainly influenced by the excitations whose frequencies are close to that of the SMTDOF and the possible frequency band intersection if the target natural periods are set so that their associated frequencies are closer than 20% away from each other. While the index Count is set as 10 because it is found to be a sufficient number to produce an acceptable result. However, the iteration number can be increased to get a better solution. This, of course, comes at the expense of increased computational effort.
Numerical example
Target response spectrum and seed records
Two completely different response spectra are chosen as the target response spectra to produce bi-directional ground motions matching with the target RotD100 response spectra while having the minimum error of RadSAP with the seed records at the target natural periods
For the seed-recorded bi-directional ground motions, 10 pairs are selected from the Pacific Earthquake Engineering Research (PEER) Center NGA-West2 database based on the resemblance in response spectrum with the target CJJ and ASCE RotD100 response spectrum, respectively. Tables 2 and 3 summarize the main information of the selected records, including record sequence number (RSN), moment magnitude (Mw), mechanism, and distance (i.e. Joyner-Boore distance corresponding to the closet distance to the surface projection of an extended fault, Rjb). Figure 11 presents the RotD100 response spectra of the seed-recorded bi-directional ground motions together with the target CJJ and ASCE RotD100 response spectra. To have a better comparison, the seed-recorded bi-directional ground motions are scaled so that PGA is 1.0 m/s2 and 0.7 m/s2 for the CJJ and ASCE case, respectively. It can be seen that the original individual RotD100 response spectrum shows resemblance in the general shape and the mean value has a close match with the target RotD100 response spectrum.
List of seed-recorded bi-directional ground motions for target CJJ spectrum
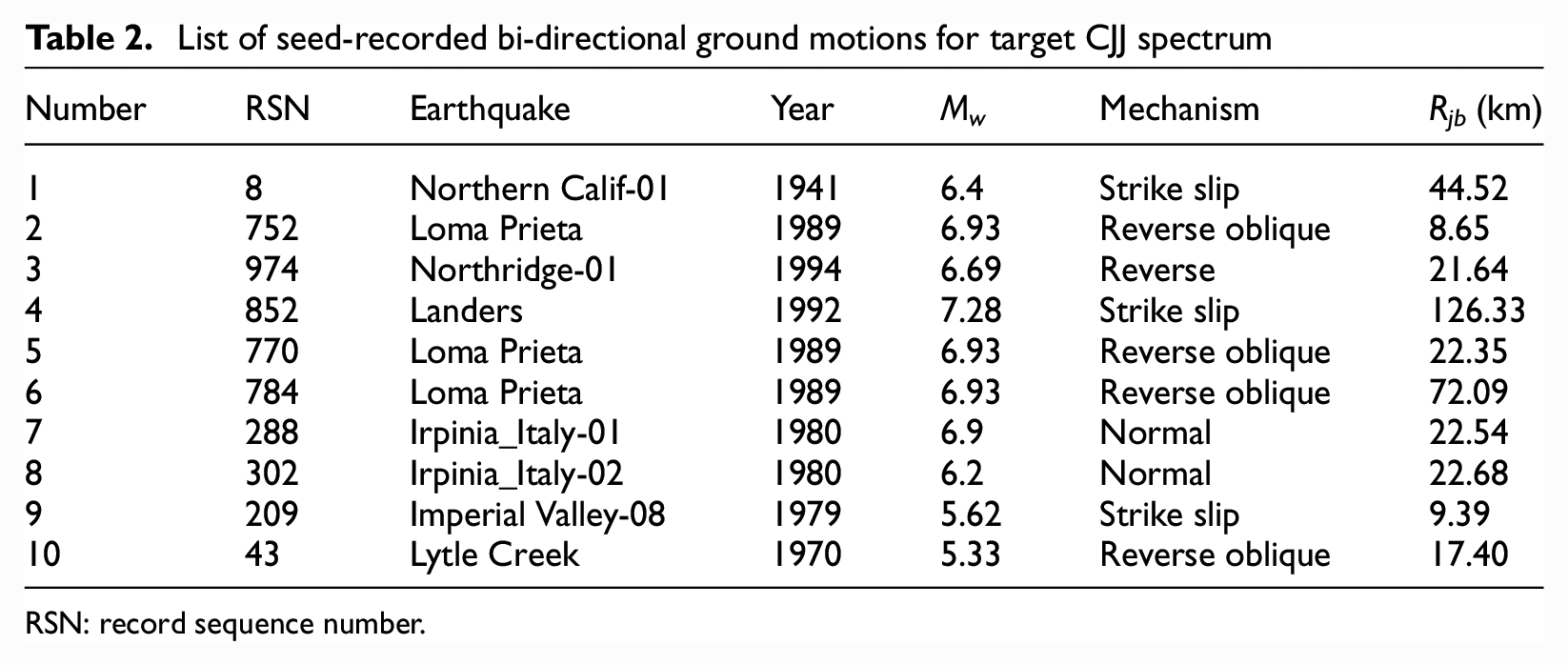
RSN: record sequence number.
List of seed-recorded bi-directional ground motions for target ASCE spectrum
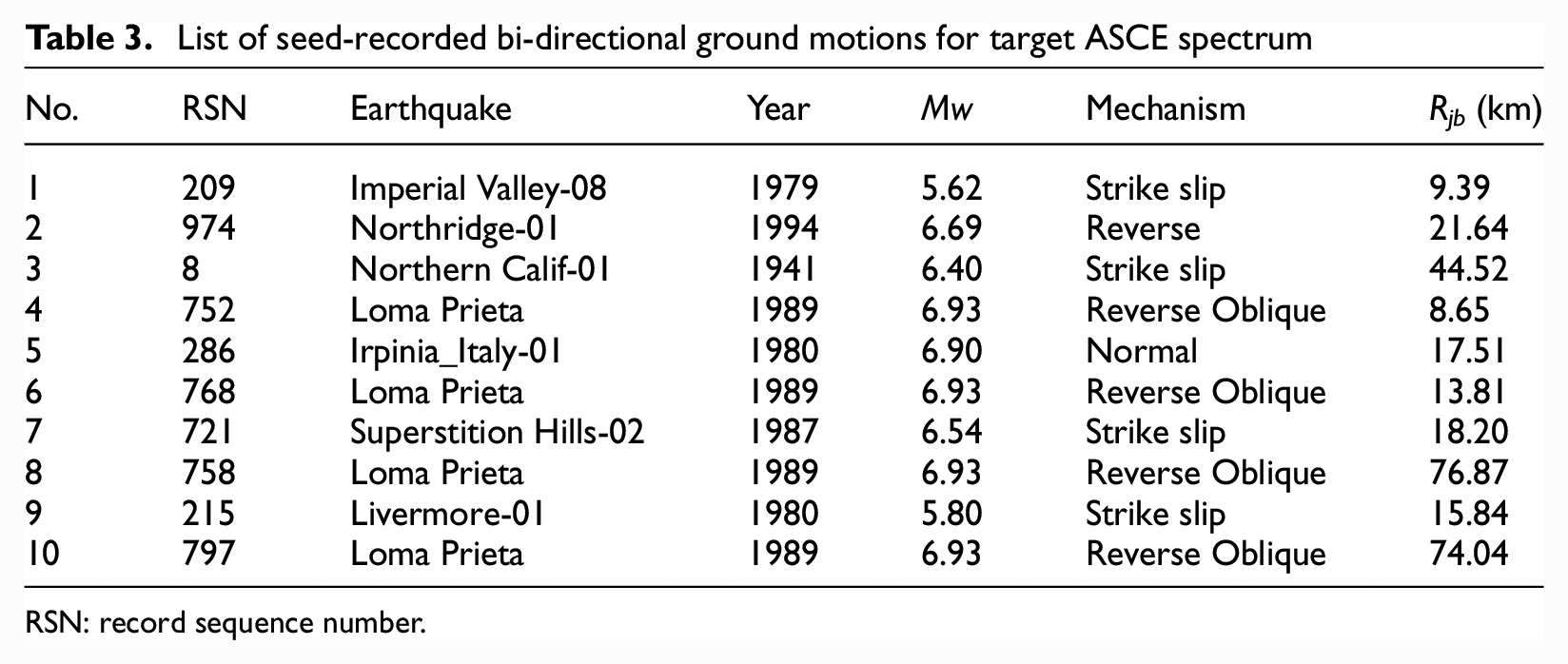
RSN: record sequence number.
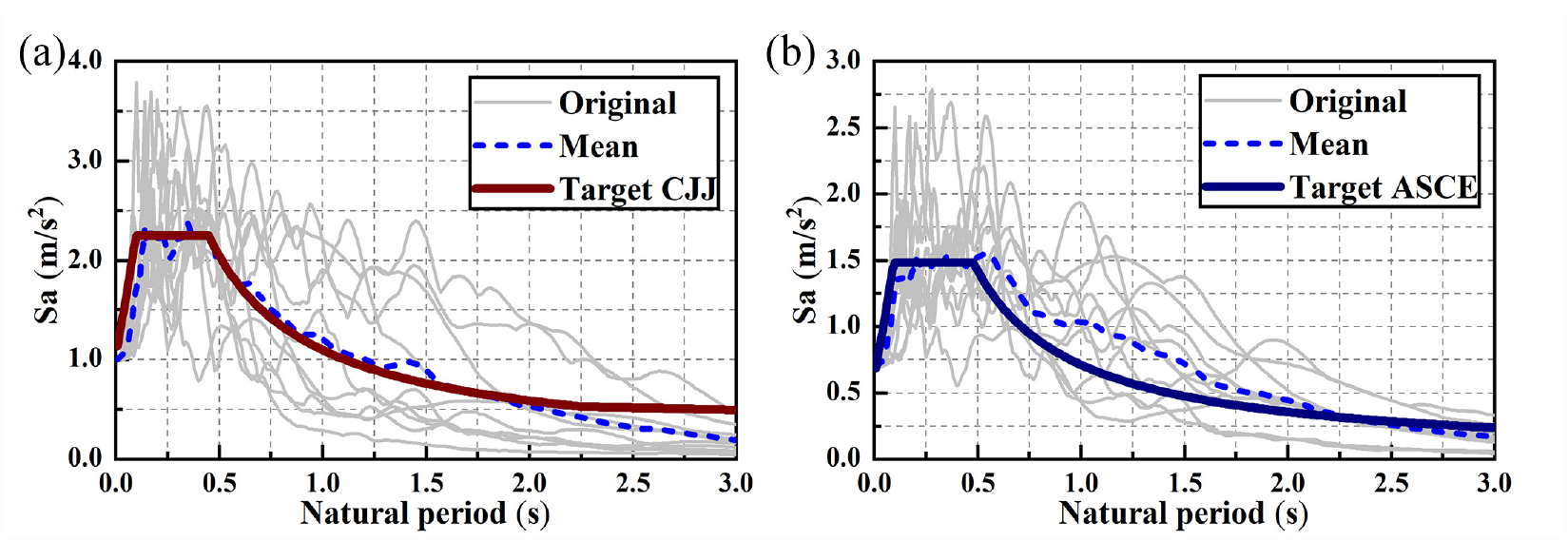
RotD100 response spectrum comparison (a) CJJ and (b) ASCE.
Results
In this section, eight periods are chosen as the target natural periods to show the capability of the proposed method to produce bi-directional ground motions that are compatible with the target RotD100 response spectrum while maintaining the resemblance in the overall shape of RadSAP. The eight periods are 0.01, 0.2, 0.5, 1.0, 1.5, 2.0, 2.5, and 3.0 s. A natural period of 0.01 s is chosen because its OA is almost the same as the maximum absolute resultant acceleration in the horizontal plane. The selected 20 bi-directional ground motions are modified to be compatible with the target CJJ and ASCE RotD100 response spectra. The comparison between the target and generated RotD100 response spectra using the proposed method is shown in Figure 12. It can be seen that the bi-directional ground motions generated using the proposed method are target RotD100 response spectrum compatible through their mean and individual values. This result indicates the effectiveness of spectral matching of the proposed method.
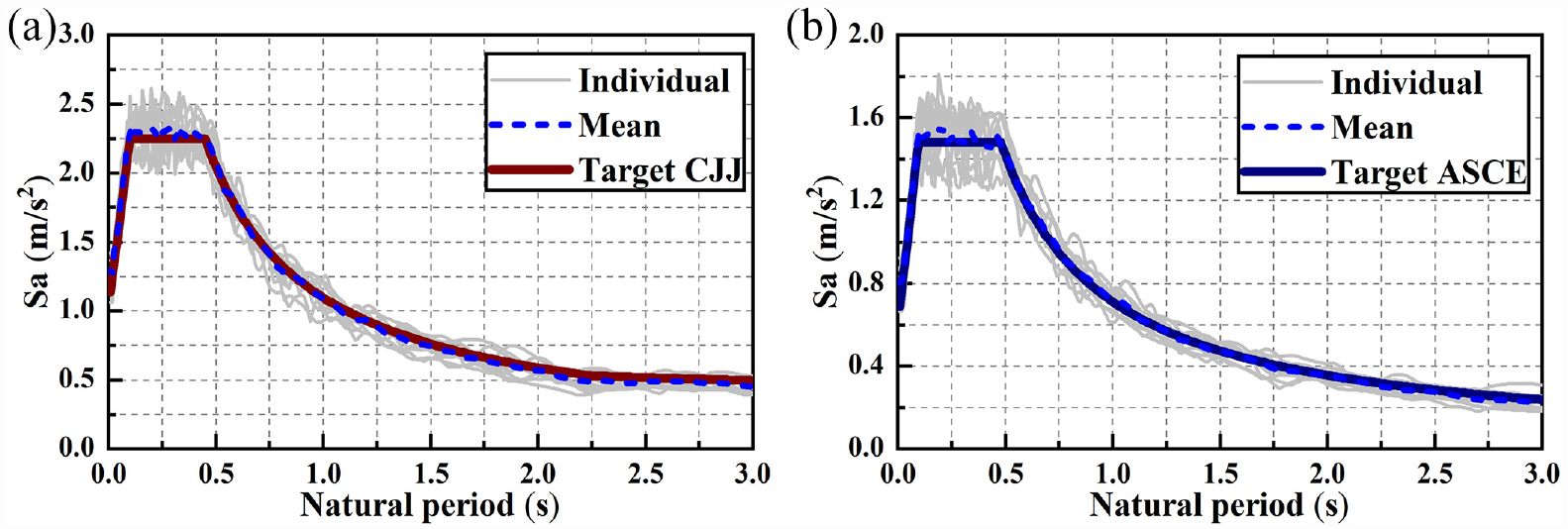
Comparison of the response spectra obtained using the proposed method (a) CJJ and (b) ASCE.
In the comparison of the overall shape of RadSAPs, it is found that the proposed method is effective in maintaining the similarity of RadSAP at target natural periods for the 20 bi-directional ground motions. For the sake of brevity, Figures 13 and 14 show two comparisons in the shape of RadSAPs at eight target natural periods between the original seed records and the bi-directional ground motions obtained using the previous version method and the proposed method for the CJJ and ASCE case, respectively. The seed bi-directional ground motions were recorded at the Northern Calif-01 earthquake of 1941 (No. 1, RSN 8 in Table 2) and the Imperial Valley-08 earthquake of 1979 (No. 1, RSN 209 in Table 3) for CJJ and ASCE case, respectively. It can be seen that the RadSAPs obtained using the previous version method (blue dashed line) showed a significant bias with the target seed-recorded bi-directional ground motion (black solid line). For the CJJ case, the shape of RadSAPs at natural periods of 0.01, 2.5, and 3.0 s substantially differs from the target. Also, the shape of RadSAPs at natural periods of 0.01, 0.2, 0.5, and 1.5 s deviates from the target for the ASCE case. The red solid line in Figures 13 and 14 shows the results obtained using the proposed method. As can be seen, there is a closer overall shape of RadSAPs match between the bi-directional ground motions obtained using the proposed method and the seed-recorded bi-directional ground motions. This result demonstrates the effectiveness of the proposed method in terms of the goodness-of-match of the overall shape of RadSAPs to that of the seed-recorded bi-directional ground motions.
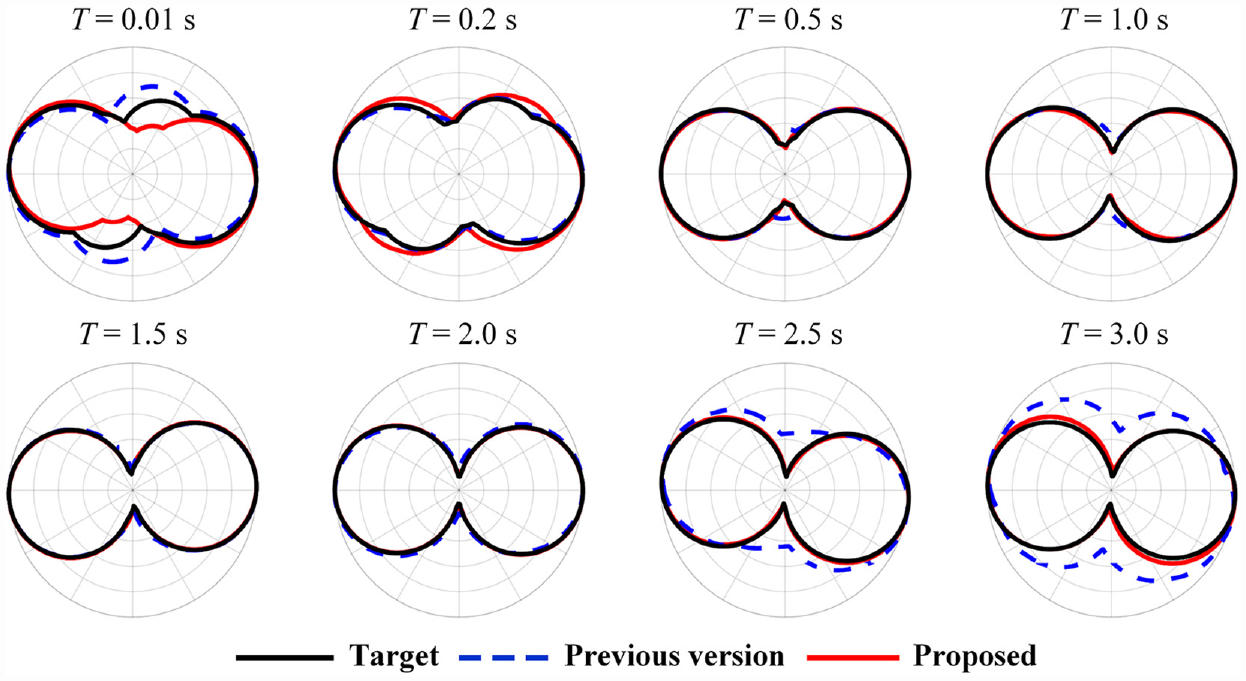
Comparison of RadSAPs for the target CJJ response spectrum (Northern Calif-01 earthquake of 1941, No. 1, RSN 8 in Table 2).
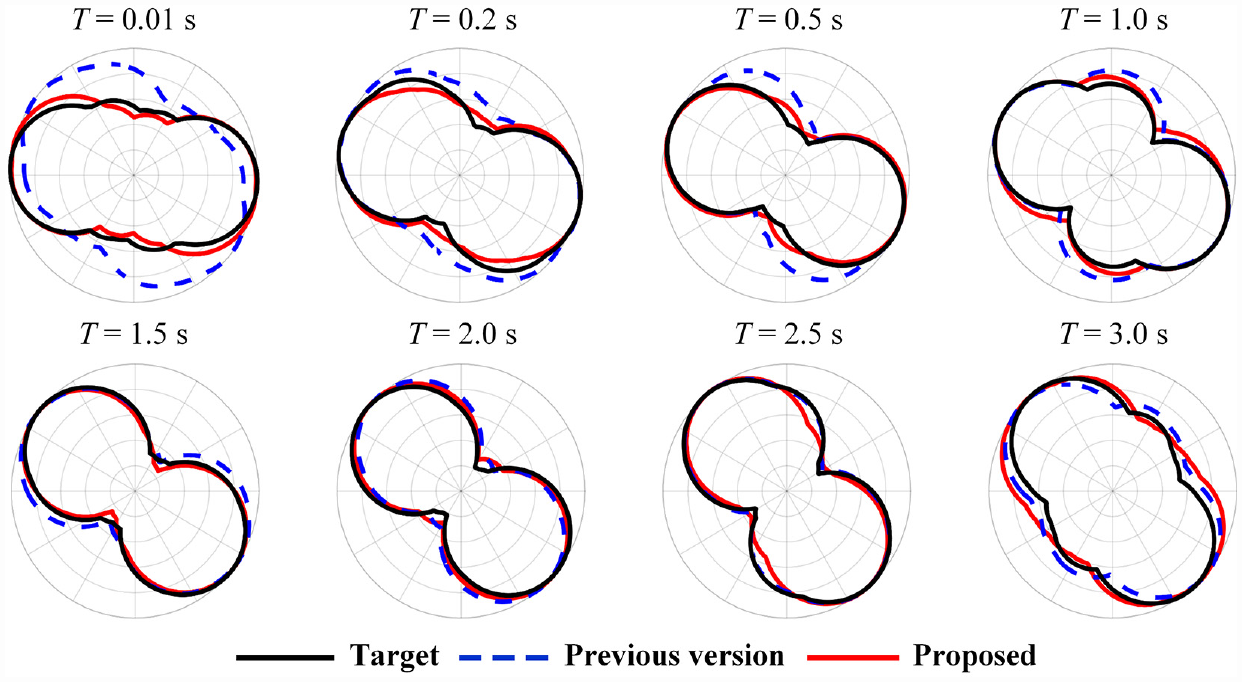
Comparison of RadSAPs for the target ASCE response spectrum (Imperial Valley-08 earthquake of 1979, No. 1, RSN 209 in Table 3).
Discussion
As mentioned above, the proposed algorithm rotates the CDFT coefficients near target natural periods. This will change the phase difference and result in an unrealistic envelope shape as compared to the observed accelerogram. Thus, the algorithm for modifying the envelope shape
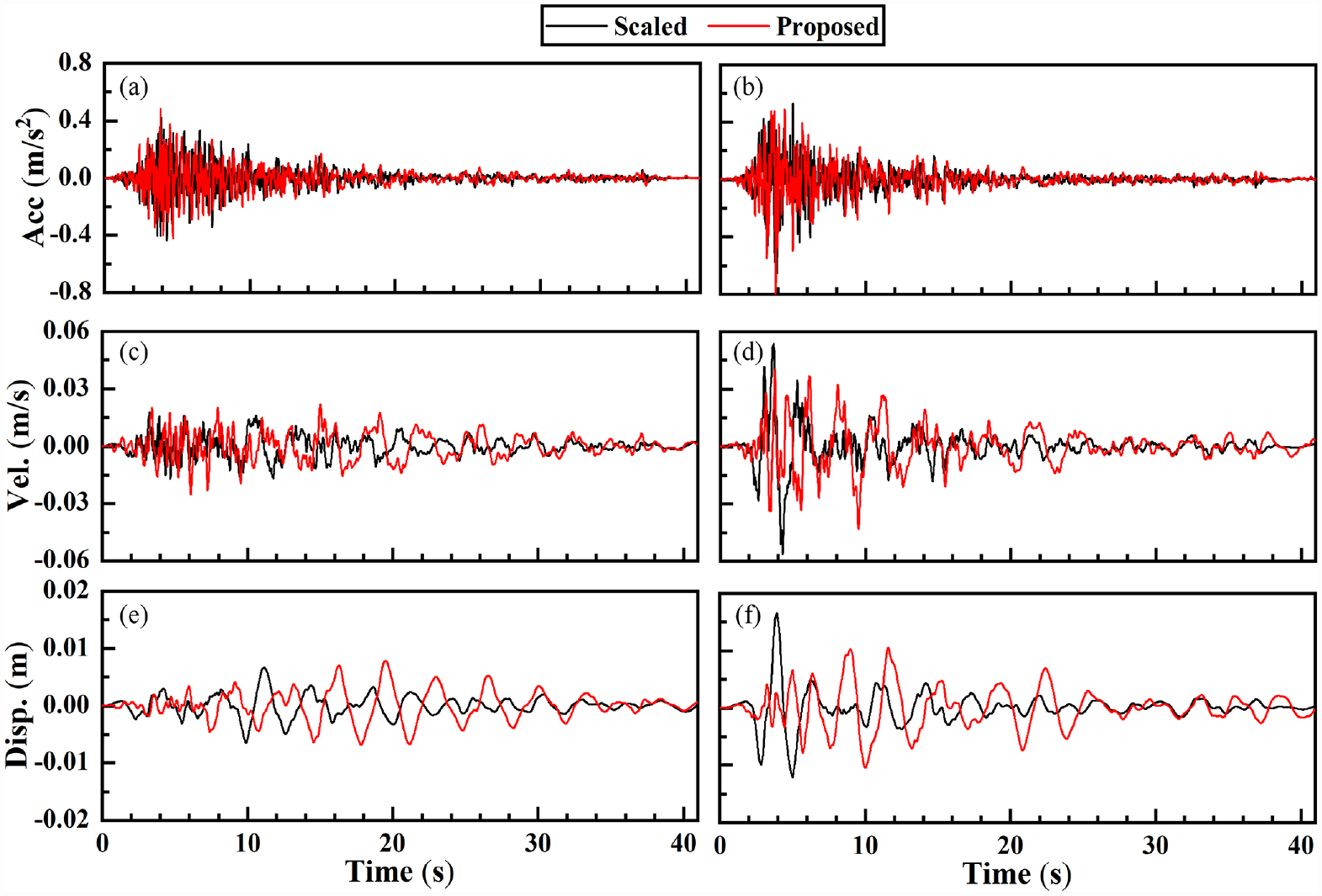
(a) and (b) acceleration, (c) and (d) velocity, (e) and (f) displacement time history for the scaled recorded bi-directional ground motion (No. 1, RSN 209 in Table 3) and the RotD100 spectral-compatible acceleration using the proposed method (each column corresponds to a different component).
Due to the iterative modification of the envelope shape of the picked candidate bi-directional ground motion, the AI is found to be improved as compared to the previous version method. Figure 16 shows the AI comparison among the scaled recorded bi-directional ground motion in Figure 15 (No. 1, RSN 209 in Table 3) and the results obtained using the previous version method and the proposed method. It is shown that the proposed method can generate bi-directional ground motion that follows closely with the target scaled record in terms of AI. For other seed-recorded bi-directional ground motions, similar results are obtained and are presented in the appendix.
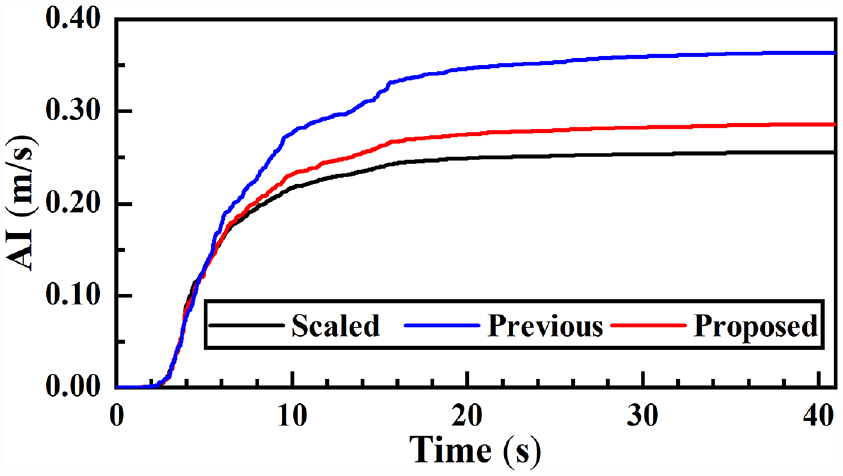
Arias intensity comparison for the scaled recorded bi-directional ground motion (No. 1, RSN 209 in Table 3) and the RotD100 spectral-compatible acceleration using the previous version and proposed method.
Conclusion
A new algorithm based on the CDFT and the greedy algorithm is proposed to modify the bi-directional ground motions to be spectrally matched with the target RotD100 response spectrum while maintaining its OA and overall shape of radial spectrum acceleration pattern (RadSAP) at the target natural periods in this article. The greedy algorithm is used to pick the best candidate that produces the minimum error in the overall shape of RadSAPs at target natural periods, while the CDFT coefficients of the picked candidate near the target natural periods are rotated to achieve an improved compatibility with the OAs. The rotation of CDFT coefficients also contributes to the modification of the overall shape of RadSAPs. In order to avoid the significant change in the envelope shape of the bi-directional ground motion after CDFT coefficients rotation, the algorithm for modifying the envelope shape
Although the proposed method seems to be capable of spectrally matching bi-directional ground motions to a target RotD100 spectrum while maintaining the RadSAPs at target natural periods, and the modified ground motions seem to be reasonable, there are some limitations in this method. The modification of envelope shape
The algorithm is implemented in MATLAB and a graphic user interface is now under development to facilitate the use of the software. The code can be accessed from the corresponding author upon reasonable request. The repository including the digital appendix to this study presenting the individual results for this work is available at: https://github.com/kensyuu18-zj/ES-RadSAP.
Footnotes
Acknowledgements
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors appreciate the financial support provided by the China Scholarship Council (Grant Number 202006260048).