
Abstract
Earthquakes with rupture forward directivity effects can produce high amplitude, pulse-like ground shaking, which imposes significantly greater seismic demands on buildings compared to non-pulse-like shaking of similar amplitude. Although theoretical frameworks exist for the incorporation of rupture directivity effects into probabilistic seismic hazard analysis (PSHA), the associated computational burden often makes it impractical for regional-scale studies in practice. Furthermore, many available models to estimate directivity are limited to the application to ruptures of limited geometrical complexity. In this study, we develop a deep learning–based model that provides adjustment terms (moment modifiers) for the mean and standard deviation of ground motion distributions near an earthquake rupture, as predicted by a ground motion model. Thereby the model depends on a chosen distribution of hypocenters along the fault, but not on individual hypocenter locations. Our model is trained on a synthetic dataset generated from an empirical directivity amplification model that includes a wide variety of earthquake ruptures, encompassing diverse seismic properties such as magnitude, dip angle, and faulting style, as well as geometrical complexities ranging from simple, planar ruptures to intricate, multi-segment, branching ruptures with step-overs and strike reversals. This enables our model to provide accurate moment modifiers for a broad spectrum of earthquake ruptures in PSHA and other applications like scenario-based estimates of shaking and loss. The final model can be easily integrated into existing seismic hazard frameworks, as demonstrated by an application in a complete PSHA calculation for Turkey. The results indicate that explicitly incorporating directivity effects can lead to significant changes in long period seismic hazard, and through the use of efficient moment modifier models based on deep learning it can be possible to expand the usage of directivity models in seismic hazard and risk analysis at large regional scales.
Introduction
The term rupture forward directivity describes the generation of high-amplitude ground motion with a short duration that can occur in the near-fault area of large earthquake ruptures. Such pulse-like ground motion is caused if an earthquake rupture propagates at a velocity close to the shear wave velocity of the surrounding medium, and if the direction of slip is aligned with the observation site (Somerville et al., 1997). Somerville (2003) has shown empirically that directivity affects only a narrow frequency band, where the peak period depends on the magnitude of the earthquake source. This empirical observation was moreover linked to physical properties such as the rise-time and the source dimensions, which generally increase with earthquake magnitude. Rupture forward directivity (directivity hereafter) has been observed for several earthquakes in the past, such as the 1992
Despite its relevance for engineering applications, explicit incorporation of directivity effects in ground motion modeling and probabilistic seismic hazard analysis (PSHA) has not yet become firmly established. Instead, it is typically captured implicitly during the regression stage of ground motion model (GMM) development, simply due to the fact that an often unspecified fraction of observations is affected by directivity. Because the pulse-like characteristics of directivity relevant to PSHA diminishes quickly beyond the near-field region, and because aleatory uncertainty is typically not treated distance dependent in most GMMs, this procedure leads to an underestimation of ground motion variability at short source-to-site distances and overestimation at greater distances (Abrahamson, 2000), and can fail to capture strong azimuthal variations in mean and variability that may occur in the near-fault region.
Although considerable efforts have been undertaken to overcome this issue via the explicit incorporation of directivity effects in ground motion modeling (summarized in Spudich et al., 2013), to date the GMM of Chiou and Youngs (2014) is the only one to include an explicit directivity term. As an alternative, directivity adjustment models, such as the one from Somerville et al. (1997), later updated in Abrahamson (2000), or Bayless et al. (2020) and Bayless et al. (2024), are inferred from ground motion residuals of directivity neutral GMMs in order to provide post hoc adjustments of GMM predictions. However, such directivity adjustment models usually depend on the exact hypocenter location on a rupture plane, such that an additional computational loop over various hypocenter locations would have to be added to PSHA calculation workflows. This full hypocenter randomization approach is realizable for earthquake source models of limited size and complexity, as shown by the implementation for the 2010 New Zealand National Seismic Hazard Model (NSHM) (Stirling et al., 2012) by Weatherill and Lilienkamp (2023), but the associated computational effort becomes disproportionally large for large scale PSHA calculations for state-of-the-art source models such as the one presented in Seebeck et al. (2023) and Van Dissen et al. (2022) for the 2022 New Zealand NSHM (Gerstenberger et al., 2022a, 2022b), or the Uniform California Earthquake Rupture Forecast version 3 (UCERF v.3) (Field et al., 2014; Page et al., 2014) as recently shown by the implementation of the full hypocenter randomization approach by Al Atik et al. (2023).
As an alternative to the full hypocenter randomization approach, Watson-Lamprey (2018) suggests to modify the moments of the probability distribution of ground motion that is predicted by a directivity neutral GMM (median and variance) with adjustment terms that account for the average directivity effect according to a predefined spatial distribution of hypocenter locations on a rupture plane. These so-called modifiers of moments are consequently hypocenter location independent and can therefore be incorporated with little computational effort in large-scale PSHA computations (Donahue et al., 2019).
To implement such a model, Watson-Lamprey (2018) suggests to fit empirical, closed-form equations to synthetically calculated moment modifiers. Although this approach is computationally efficient, a loss of accuracy compared to the synthetic moment modifiers is ascertained, which is caused by the relatively simple parametric form of the chosen equation. The severity of this issue is acceptable for the simple ruptures the model was calibrated with, and a certain stretch toward slightly more complex ruptures is also within reach as recently demonstrated by Withers et al. (2024b). However, the ascertained limitation in reproducing the finer details of the moment modifier fields in such cases raises doubts regarding the applicability of such a model to highly complex, branching multi-segment ruptures as they can occur in advanced source models. Kelly et al. (2022) and Withers et al. (2024a) are addressing this limitation following an approach in which they use a shallow artificial neural network (ANN) approach to predict point-wise values of moment modifiers for a wide range of rupture geometries and seismic properties from a subset of simple ruptures from UCERF v.3.
A similar approach was suggested by Weatherill and Lilienkamp (2023) who utilize a convolutional artificial neural network (ANN) to efficiently and accurately generate maps of moment modifiers for 3884 complex, multi-segment earthquake ruptures from the 2022 New Zealand NSHM. However, in this case the objective was to define a compact representation of the directivity fields specifically for the ruptures contained within the New Zealand NSHM. Therefore, the resulting model is not capable of generalizing to ruptures beyond those contained within the 2020 New Zealand NSHM rupture inventory.
The purpose of this study is to modify this ANN approach in order to derive a deep learning model that generalizes to a wide range of rupture geometries and seismic properties. Critically, to facilitate its use in PSHA the model takes as predictors parameters that are already adopted by existing ground motion models, and thus would not require the adaptation of the calculation software to compute new source and path parameters. Doing so can facilitate wider usage of the neural network model to different regions of the world and to different types of seismogenic fault source models. The study is organized as follows: In the next section, we will introduce the adapted modifier of moments approach, followed by a brief description of the generated synthetic data set. A detailed description of the model calibration procedure using the U-Net neural network architecture (Ronneberger et al., 2015) and some modeling results are presented thereafter. Subsequently we present a practical application of the derived model in a PSHA calculation for Turkey. We finalize the study with a brief discussion of the model performance and some advice for practical usage.
The modifier of moments approach
The modifier of moments approach (Watson-Lamprey, 2018) is a means of directly including directivity effects in the seismic hazard integral (Equation 1, Cornell, 1968), without the need for an additional integral to account for hypocenter location uncertainty, which would significantly increase computational demand (Donahue et al., 2019).

Here,
The term:

where

is typically solved using a GMM, which considers the logarithm of a ground motion intensity measure to be normally distributed with median
Data
The first step toward a universally applicable, ANN based modifier of moments model is the generation of a large and diverse synthetic data set. This data set must contain
In order to describe earthquake ruptures of various sizes, shapes, and complexities in a standardized way for usage in a deep learning model, we decided to format the predictive parameters for each rupture
To calculate the moment modifiers
According to the criteria for the selection of an appropriate directivity model suggested in Weatherill and Lilienkamp (2023), we select the Bayless et al. (2020) model to simulate the directivity amplification patterns for each hypocenter location. This model is particularly well suited for application to ruptures of increasing complexity, as the azimuthal component of the directivity predictor itself adopts the GC2 framework that aims to ensure a topologically continuous representation of fault normal and fault parallel distances even in cases where faults may contain topological discontinuities such as gaps or step-overs. This makes it computationally efficient and facilitates integration into many PSHA software codes where functions to calculate GC2 are already present. Bayless et al. (2020) is also calibrated using ground motions from observed earthquakes with complex multi-segment ruptures, complemented with data from physics-based simulations, meaning that complex ruptures are well represented in the underlying dataset. In a final step, we average over the
To enable the best possible generalization to arbitrary earthquake ruptures of the final model, we need to ensure that the training data set encompasses a large variety of different earthquake ruptures, both in terms of seismic properties such as magnitude, strike-angle, and dip-angle, but also in terms of geometrical complexity. To this end we include three different earthquake rupture forecasts (NZ—New Zealand Community Fault Model (Seebeck et al., 2023), TUR—Turkey Fault Model (Basili et al., 2024; Danciu et al., 2021), GEN—A generic inventory of simple planar ruptures) in the synthetic dataset.
The NZ model is characterized by a large amount of branching, multi-segment ruptures including complexities such as step-overs and reversals of dip direction between segments. Out of the 3884 ruptures in the inventory, we reject 227 due to issues with the calculation of
The TUR inventory is composed of multi-segment ruptures that are topologically simpler compared to those from the NZ model. These ruptures allow for changes in strike along length, but the dip and style-of-faulting are constant and the segments are connected only at the segment ends (i.e. without offsets and step-overs). The ruptures are generated from the ESHM20 fault source model (Basili et al., 2024), whose full ERF is modeled with a truncated Gutenberg-Richter distribution between
The purpose of including the GEN inventory is to ensure the functionality of the final model also for simple, planar ruptures that may occur in real-time applications such as ShakeMap. Since GEN is composed of single segment ruptures, we randomly split the 1600 ruptures into a training (1280) and a validation (320) set.
The distribution of ruptures according to Magnitude and dip angle
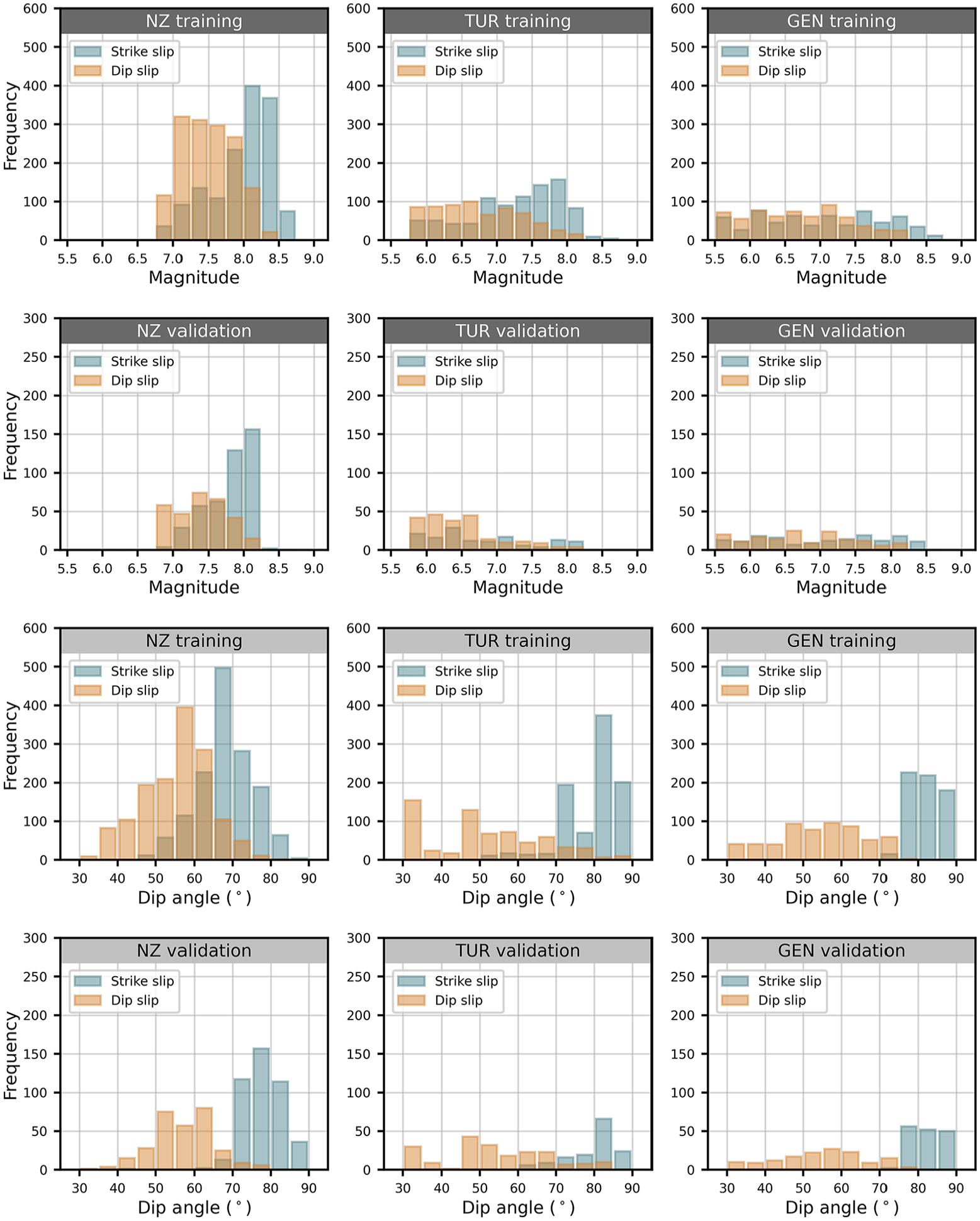
Distribution of the synthetic training and validation data sets with respect to magnitude, dip angle, and ERF. Lower bound magnitudes in NZ and TUR are determined by the fault models’ specific thresholds separating background from fault based seismicity. The lower bound magnitude of 5.5 for GEN was chosen to slightly extend our model’s applicability to lower magnitudes.
Deep learning–based modifier of moments implementation
The ability to grasp non-linear relations in data sets at great detail (e.g. Lecun et al., 2015), make deep learning an appealing candidate for the modeling of the complex, spatially variable patterns of moment modifiers. Classical deep learning, as implemented in this study, is a supervised machine learning method that dates back to the mid-twentieth century (McCulloch and Pitts, 1943; Rosenblatt, 1962; Rumelhart et al., 1986; Widrow and Hoff, 1960), where first attempts were made to design artificial neural networks, that is, model architectures that mimic the information processing workflows in the human brain (Bishop, 2006). One of deep learning’s most interesting key features is the fact that ANNs learn complex non-linear relations in data sets autonomously from the observation of pairs of predictive parameters and corresponding target parameters (in our case the representation of a rupture (predictive), and the corresponding moment modifiers (target)), such that the introduction of a priori knowledge via an inflexible, closed form equation becomes obsolete. However, due to the lack of a priori knowledge that could potentially constrain a model in case of data scarcity, a large set of data examples is required in order to train an ANN to the state where it can be utilized as a reliable predictive model. For a more thorough introduction to the field of deep learning we refer to the review of Lecun et al., (2015).
Deep learning has in recent years found various applications in seismology such as phase picking in seismic waveforms (Perol et al., 2018), fault detection in seismic images (Xiong et al., 2018), and ground motion modeling (Derras et al., 2014). Of particular interest is here the U-Net neural network architecture (Ronneberger et al., 2015), which operates on data in the shape of multi-channel images and is therefore a natural fit for the modeling of spatial data as demonstrated, for example, with the prediction of the strength of wireless communication signals in urban areas (Levie et al., 2020), or the prediction of spatially coherent maps of ground motion in the Kanto region (Lilienkamp et al., 2022). In this study, we employ the U-Net architecture to take the stack of maps describing an earthquake rupture
After initialization, the U-Net neural network is merely a collection of random coefficients. As a consequence, if a model output

This is implemented using backpropagation (Rumelhart et al., 1986) and the Adam optimization algorithm (Kingma and Ba, 2015). We decided to normalize the loss function due to the strong period dependence of the directivity amplitude, such that equal attention is placed on all periods. Here,
We tested nine different configurations of the training procedure, which are summarized in Table 1. We primarily varied the composition of the training data set in order to demonstrate the gain of using data from three different ERFs. For all configurations, we used the validation data set which is composed of ruptures from all three ERFs. For the configuration in which we use ruptures from all ERFs in the training set, we also tested the influence of the batch size hyperparameter.
U-Net training configurations. For all cases, the full validation data set from all three ERFs was used during training
Model performance evaluation
Initially, we evaluated the performance of the models across the nine configurations outlined in Table 1. For each model, we predicted moment modifiers for all samples in the validation data set and obtained the loss value w.r.t. the precalculated moment modifiers according to Equation 4. The cumulative distribution of loss values for each individual ERF is depicted in Figure 2. For the sake of clarity, we decided to present only the results obtained for a response period of
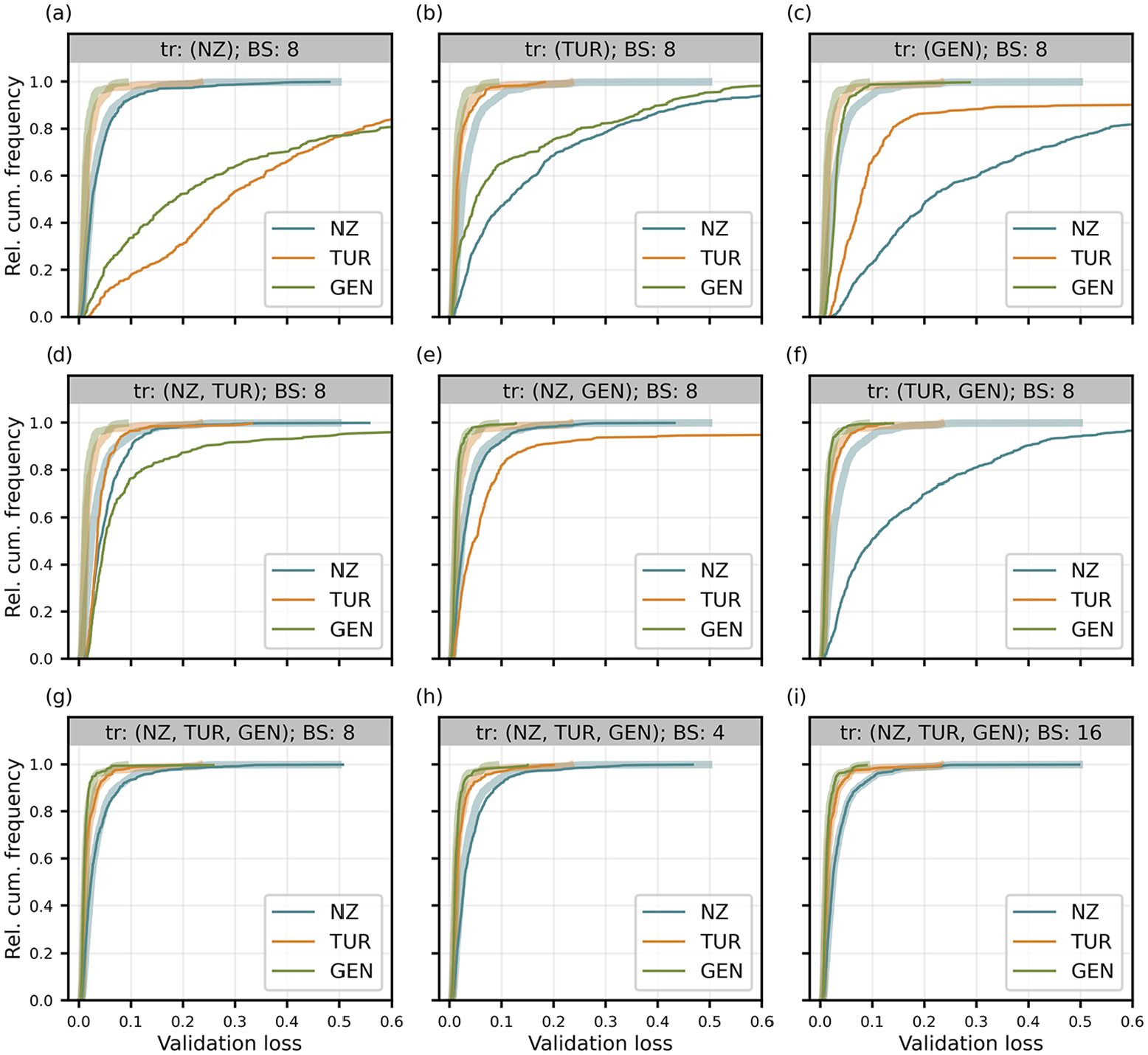
Comparison of model performances on validation samples for configurations given in Table 1 and at a response period of
Another significant observation is the considerable performance enhancement achieved by introducing a second ERF into the training set, evident in predicting ruptures from the third, still excluded ERF (Figure 2d to f). Notably, while this improvement is substantial in all cases, it is less pronounced for the most complex NZ ERF (compare Figure 2c and f). Comparing the performance gains resulting from the addition of a second ERF (e.g. Figure 2a and e) and the relatively smaller but still significant gains from using a third ERF (e.g. Figure 2e and i), led to the conclusion that training the U-Net model with ruptures from the three ERFs enables reasonable estimates of moment modifiers even for ruptures for previously unexplored ERFs. Although the influence of batch size was found to be mostly negligible, a slight advantage was observed with a batch size of 16 (model Mod9), hence further results shown in this study are obtained from this model.
To illustrate the model’s predictive capabilities and its ability to handle challenging scenarios, we present three example predictions from model Mod9 in Figure 3. These examples were selected at the 99th, 90th, and 80th percentiles of obtained validation loss values in order to demonstrate that even in demanding cases, the model’s estimates of moment modifiers remain reasonably accurate. In the example from NZ (99th percentile), a clear shift in the strongest positive mean directivity adjustment from north to south is observed, alongside a smaller-than-targeted estimate of variability. Conversely, in the TUR example (90th percentile), differences in mean moment modifiers are less systematic, with only slight underestimation of variability. Finally, for the GEN example (80th percentile), only a minor systematic difference in the mean modifier is evident in the eastern region affected by positive amplification, with no systematic underestimation of variability observed upon visual inspection.
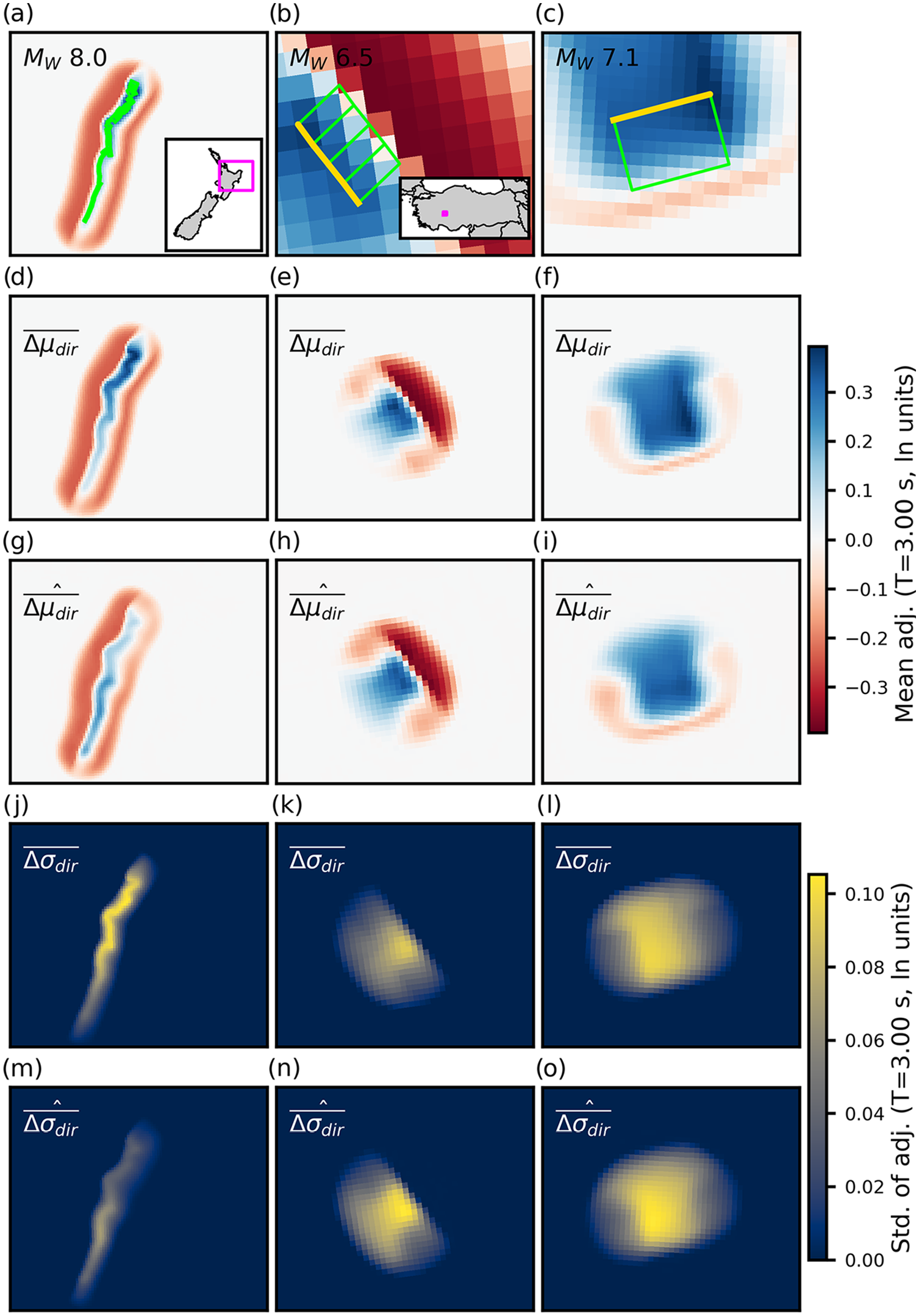
Comparison of precalculated moment modifiers (d–f; j–l) with the U-Net reproductions (g–i; m–o) for the validation ruptures presented in a–c. The loss values of 0.244 (left column), 0.057 (center column), and 0.035 (right column) are representative for the 99th, 90th, and 80th percentile of obtained validation losses, respectively. Yellow lines in (b) and (c) indicate the top of rupture.
To offer a more comprehensive assessment of the overall model performance, we conducted a residual analysis, the results of which are presented in Figure 4. Residuals were calculated pixel-wise for validation ruptures for
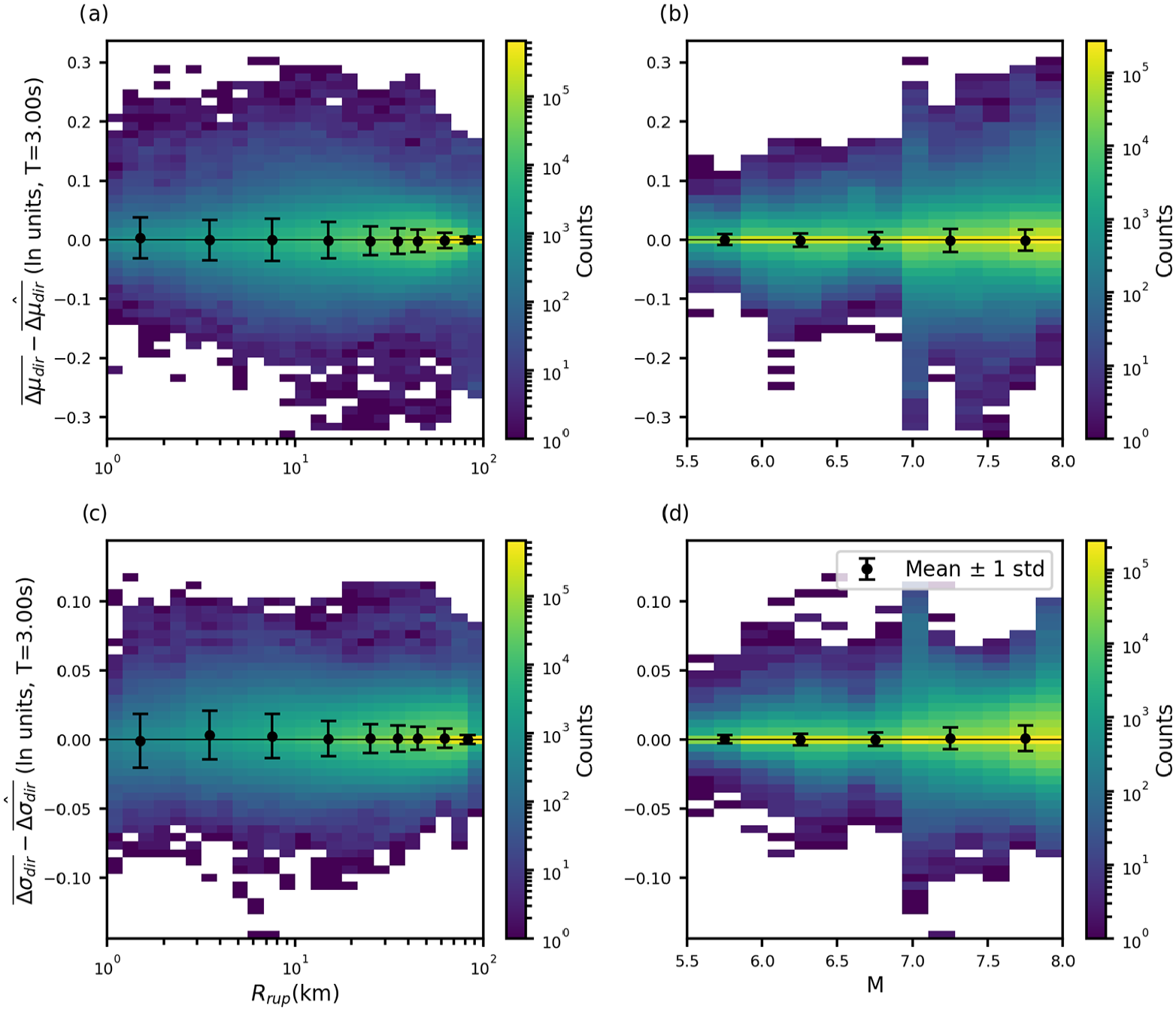
Distribution of pixel-wise model residuals from validation samples w.r.t.
The standard deviation of the residuals for both moment modifiers consistently decrease with increasing
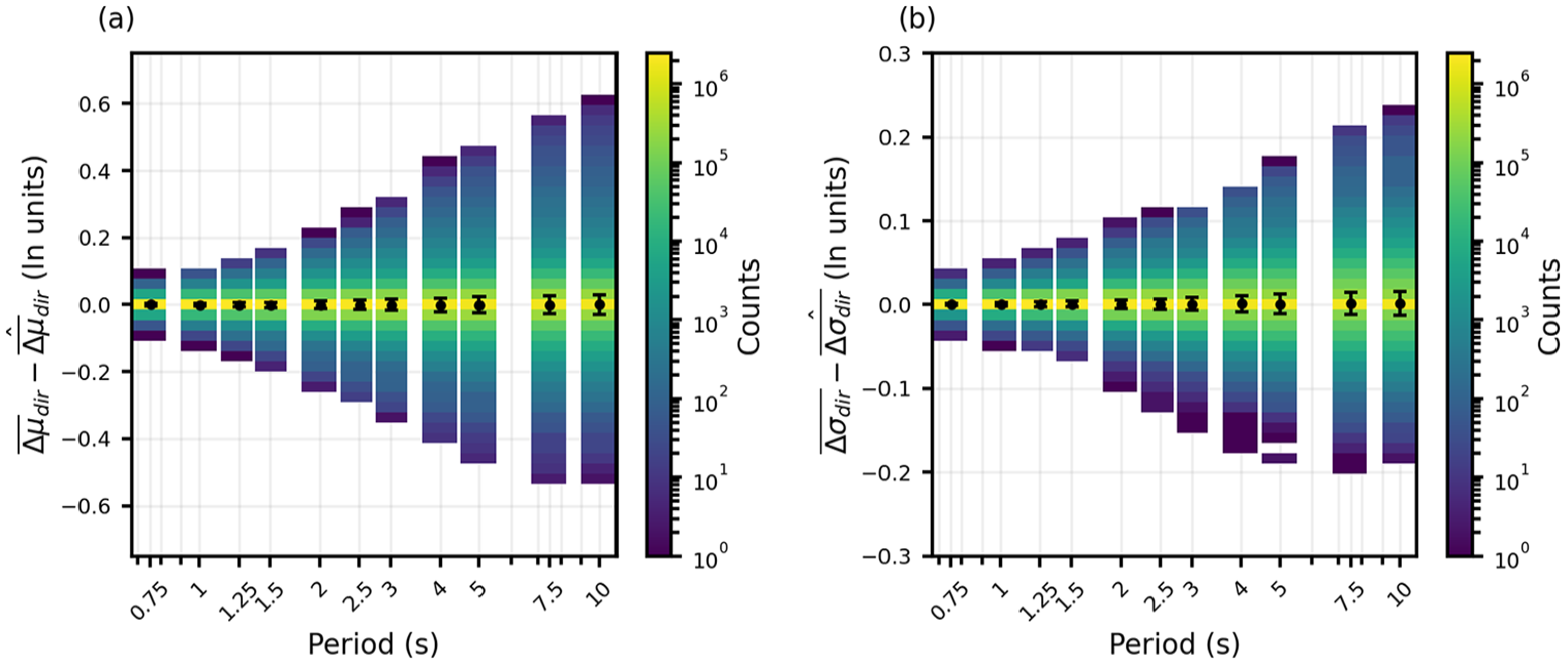
Distribution of pixel-wise model residuals from validation samples w.r.t. period
No discernible systematic trend with the dip angle of the rupture was identified. A detailed compilation of empirically determined biases and standard deviations depending on
A direct comparison of pixel-wise, precomputed and estimated values of moment modifiers for validation samples at a period of
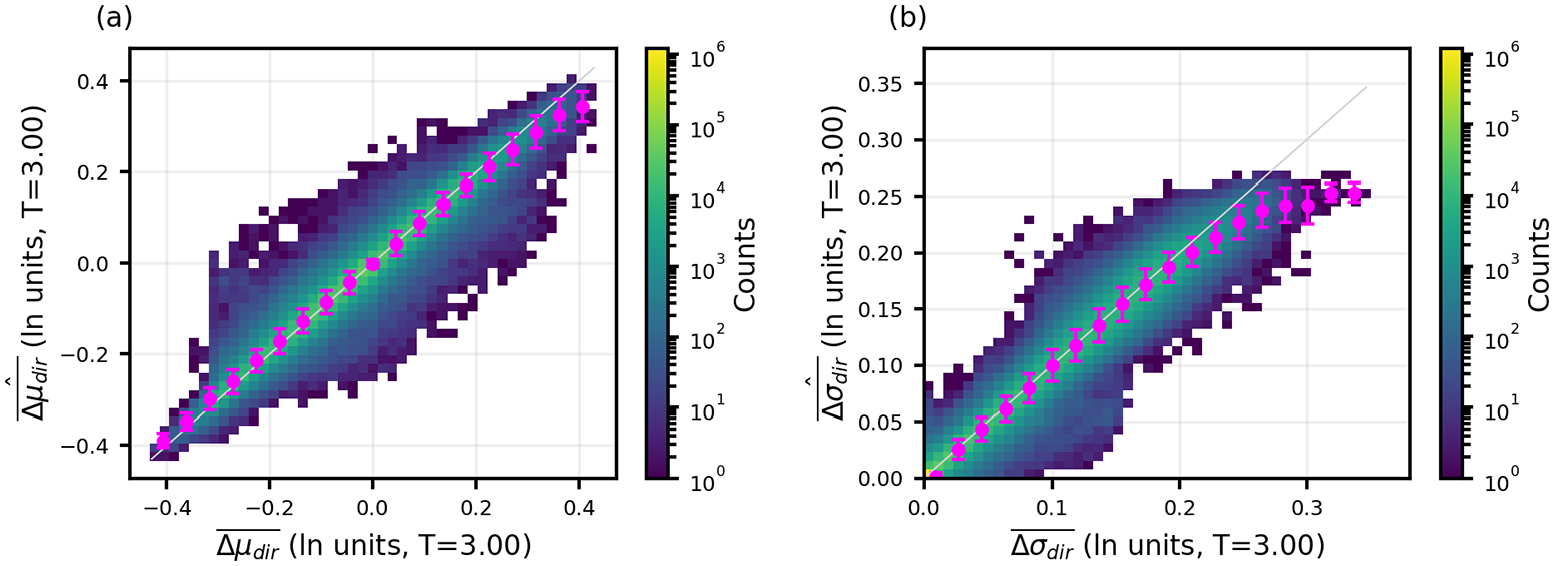
Pixelwise comparison of precalculated moment modifiers and model predictions for validation examples. Error bars indicate
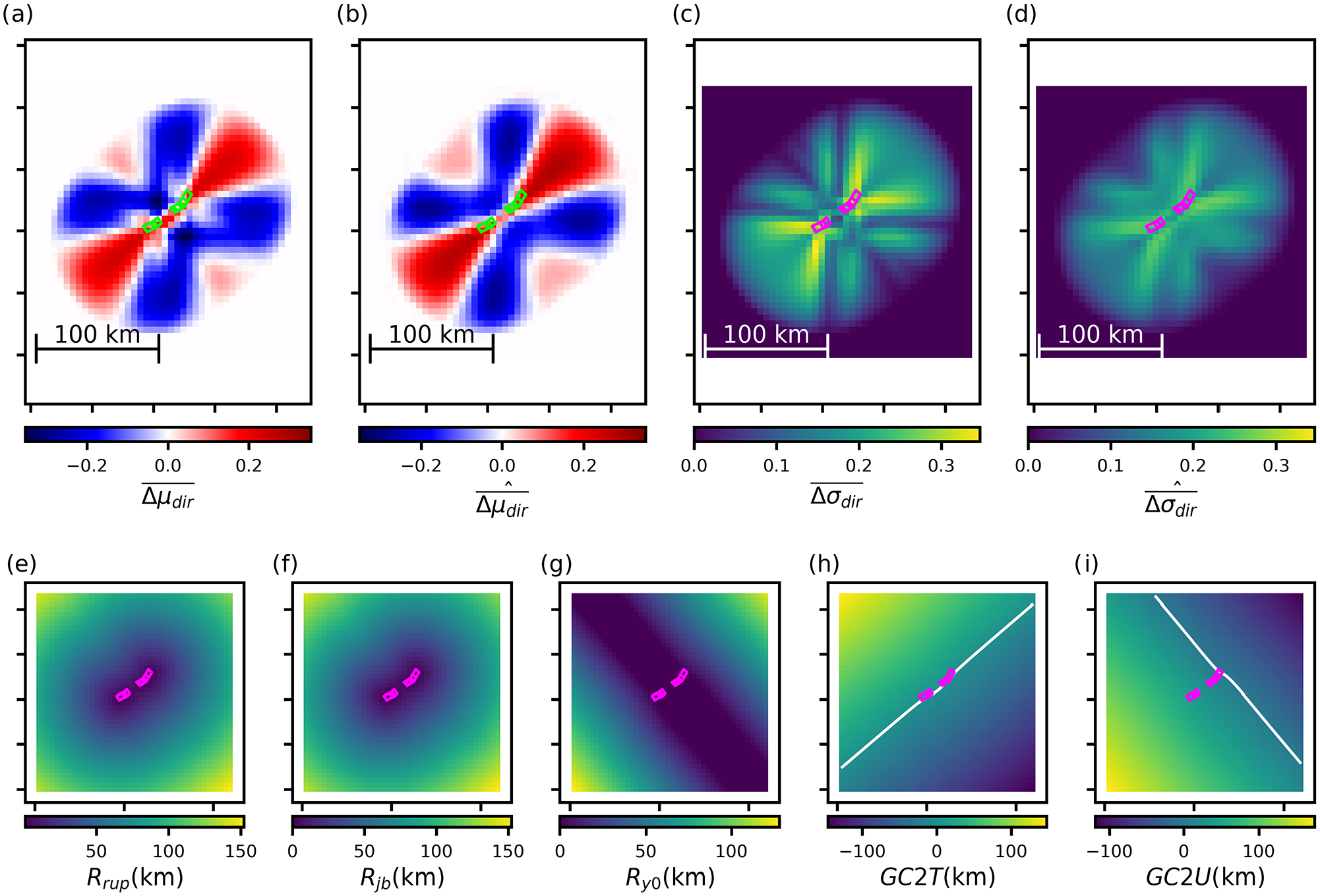
Example of a rupture from the NZ ERF (e–i) with exceptionally high values of
This
For the remaining two ruptures that generate comparably large exceptional values of
Implementation in PSHA
To demonstrate the application of the directivity model into probabilistic seismic hazard analysis, we consider the case of Turkey, and in particular the active fault sources contained within the recent 2020 European Seismic Hazard Model [ESHM20] (Basili et al., 2024; Danciu et al., 2024, 2021). A subset of this fault model formed part of the data set used to train the neural network, but in this case, we apply the resulting generalized directivity model to the complete set of ruptures generated by the fault source components of the model. The fault source model for ESHM20 is only one of the two source model logic tree branches used in the PSHA calculation, the other being a distributed seismicity (uniform area) source model. Furthermore, in the fault source model branches only earthquakes with
The Anatolian region provides a good case study for application for several reasons. First, the active fault source model contains faults with diverse styles of faulting, including long, fast-slipping strike-slip systems along the North and East Anatolian faults, extensional faulting in western Anatolia where the transform system gives way to backarc extension from the Hellenic subduction, and compressional faulting in eastern Turkey toward Lake Van and the Karliova Triple Junction. The geographical variation in style-of-faulting is shown in the upper map of Figure 8. Many of these fault systems are highly active, with rates of exceedance of
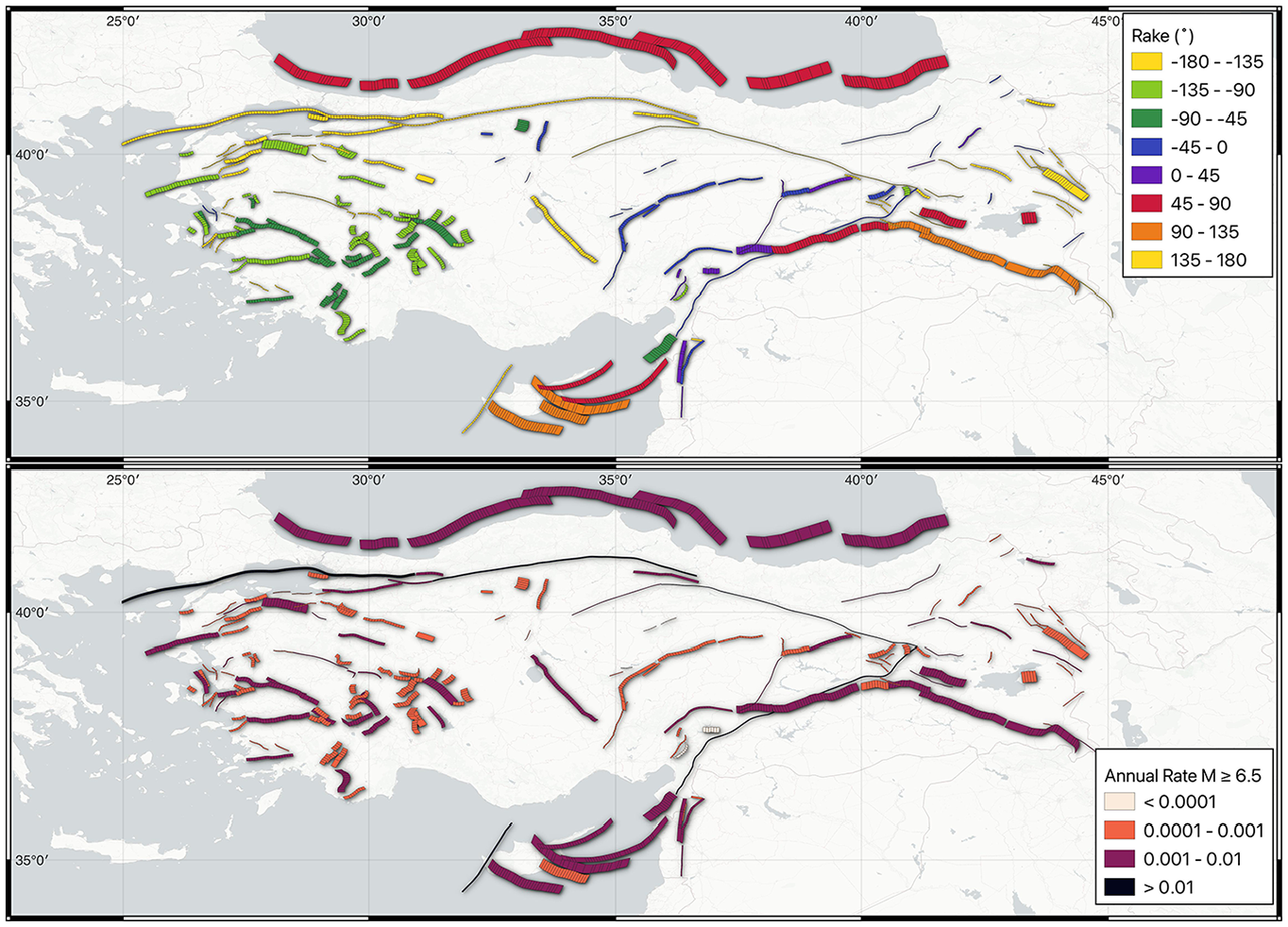
Active fault sources for Turkey extracted from the 2020 European Seismic Hazard Model with color scaled according to rake
In contrast to the ERF seismic hazard models developed for California and New Zealand using inversion (Field et al., 2014; Gerstenberger et al., 2022a), the ESHM20 adopts a floating rupture approach with earthquake recurrence described by a Gutenberg-Richter model truncated between a minimum and maximum magnitude. In this approach, each fault is described as a composite fault source with a fixed geometry and slip rate. Within the PSHA calculation, ruptures are generated for each magnitude considered within the magnitude frequency distribution using three-dimensional rupture surface whose area scales with earthquake size according to a specified magnitude frequency distribution, which in this case is Leonard (2014). If the rupture size is smaller than that of the entire composite fault source, the earthquake rupture forecast considers all the positions that the rupture can be placed uniformly within the fault surface given a specific stepping interval (5 km in this case). The rate of occurrence of that magnitude is split evenly between all of the possible corresponding ruptures can be distributed across the main fault surface. The composite fault sources represent model interpretations of the more complex geology, meaning that ruptures cannot contain offsets and/or step-overs but can change strike and, if necessary, dip along the rupture plane. This makes them more topologically simple than the inversion-based source ruptures seen in California and New Zealand. A total of 181 composite fault sources are considered in the model, covering Turkey, Cyprus and the Dead Sea transform. This results in 27,818 fault ruptures between
To assess the impact of directivity on the fault source PSHA for Turkey we run a complete probabilistic seismic hazard model for the highest weighted fault source branch of the model. For the ground motion model, ESHM20 adopts a scaled backbone logic tree, which considers the regionalized GMM of Kotha et al. (2020, 2022) as the backbone model and applies additional adjustments to describe epistemic uncertainty in source stress parameter and anelastic attenuation. For full details, see Weatherill et al. (2020) and Weatherill et al. (2024). As we are interested only in the relative change in seismic hazard given the inclusion of directivity for this illustrative application, we consider only the core backbone GMM, which is regionalized for application to Turkey, but do not consider all the possible branches of the scaled backbone logic tree. As the moment modifier model is based upon the directivity amplification model of Bayless et al. (2020), their corresponding reduction factors for the within-event variability of the ground motion model are implemented in this calculation to determine
The seismic hazard terms of the 3-s spectral acceleration,
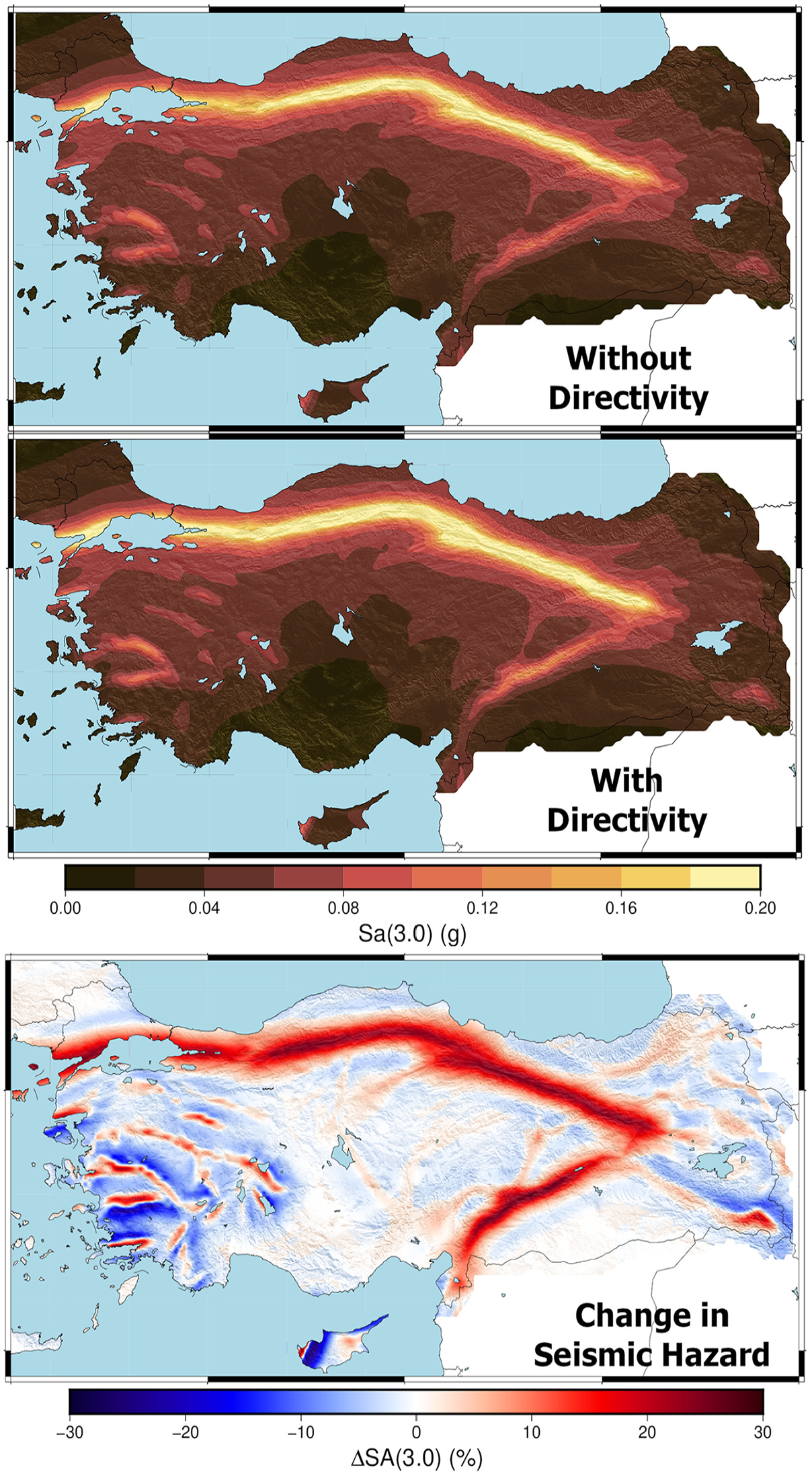
Stronger polarization of the changes in hazard are seen in the extensional regions of western Turkey rather than around the compressional faults in eastern Turkey, which seems at first counter-intuitive given that we would likely expect higher directivity amplification on reverse faults, as suggested by dynamic rupture simulations on dipping faults (Oglesby et al., 2000). This pattern in the change in seismic hazard is controlled by higher activity rate and density of faults in western Turkey and the fact that the underlying Bayless et al. (2020) directivity model on which the modifier of moments model is calibrated only distinguishes between strike-slip and dip-slip faults, and not between reverse and normal faults. As the NGA West 2 data set upon which the Bayless et al. (2020) model was fit contains a much greater proportion of reverse faulting ruptures than normal faulting, the patterns of amplification with respect to the up- and down-dip projections of the rupture in the moment modifier models will reflect more the reverse faulting case. The relevant point here is that the changes in seismic hazard around the extensional faults in western Turkey may be larger than we had expected given style of faulting, and may not necessarily be present to the same extent were one to use a directivity amplification model that distinguishes between reverse and normal dip-slip faults.
The example applications demonstrated that the neural network modifier of moments model can be applied to realistic fault-based seismic hazard models. The amplitude of the change in seismic hazard is, of course, dependent on spectral period, with peak changes on the order of ±3%–5% for
Although execution of the neural network modifier of moments model did increase the computational time of the calculation compared to the execution of the PSHA without directivity, the total running time was not prohibitive and remained considerably smaller than that of running a fully randomized hypocenter approach with this same underlying directivity model. The increased computational effort emerged from the need to calculate the distances measured required by the U-Net at the U-Net reference grid sites in addition to those required by the selected GMM at the hazard calculation target sites, and then from interpolating the moment modifiers from the U-Net reference grid to the target sites. The exact increase in calculation time and computational resources will likely vary from one software to another, and potentially from one calculation configuration to another, depending on the efficiency of the implementation of these additional steps. It should also be noted that other directivity models such as Chiou and Youngs (2014) and Bayless et al. (2024) require racetrack centering in forward application, a process that increases computational costs for application of directivity in PSHA at scale. In light of this, the computational benefit to cost ratio of using neural network based moment modifier models will likely increase when using other directivity models that require racetrack centering.
Discussion
In the “Model performance evaluation” section, we identified few ruptures for which certain combinations of the chosen hypocenter distributions, the sampled hypocenter locations, and the rupture geometries lead to exceptionally large values of the precalculated
This perspective fundamentally differs from the overfitting approach presented in (Weatherill and Lilienkamp, 2023), where the ANN model was forced to adapt as closely as possible to every individual precalculated moment modifier for every rupture. Ultimately, it is the decision of the modeler to assess to which degree the underlying dataset is to be trusted versus how much emphasis is put on maximizing the ability to generalize to novel ruptures at the cost of missing some of the finer, though potentially artificial, details in the synthetic data set.
Considering the initial purpose of the model developed in this study as a globally applicable model, we focus on the fact that even if the U-Net encounters ruptures with unfamiliar geometrical features, which is very likely to happen when applied to ruptures outside the ERFs considered in this study, it is still capable of providing amplification patterns that agree on the large scale very well with the manually calculated moment modifiers, and that the discrepancies are only revealed in the finer nuances. This property might lead to distorted estimates of the seismic hazard at few sites that are located in the small affected areas, and the hazard of which is largely dominated by this one particular rupture.
We consider our model Mod9 to be applicable to ruptures from the NZ and TUR ERFs, as well as simple planar ruptures with the following ranges of magnitudes and dip angles
-1050 km
-1094 km
Although the magnitude range in our training set is actually larger than the one suggested here, we emphasize that
The grid spacing of 5 km for both the predictive parameters and the moment modifiers was chosen to achieve a good compromise between demonstrating the capability of our model to grasp the spatial patterns of the moment modifiers and limiting the computational effort of generating the synthetic data set and training the ANN model. We note that if the number and variety of earthquake ruptures in the synthetic data set is too small, this rather coarse resolution might pose a certain limitation in resolving the spatial moment modifier patterns in the very near field, especially for small magnitude ruptures. The question of whether the resolution of the grid spacing in the U-Net has a significant impact on the uncertainty of the moment modifiers is a relevant one for seismic hazard analysis. We attempt to quantify this in an experiment comparing the calculated moment modifiers for a subset of ruptures on a higher resolution (2 km × 2 km) grid with the predicted moment modifiers from the original 5 km × 5 km U-Net interpolated to the finer grid (as would be the means of implementation in a PSHA software). The details of the experiment and the results are shown in supplemental material S7, but the key finding is that the additional error that comes from using the coarser grid U-Net to predict the finer scale distributions was on the order of around 0.0003 natural log units. While we do not discount the possibility that there may be specific source and site configurations under which the resolution mat be more relevant, for the majority of cases we do not expect this error to have a significant impact on the seismic hazard calculations.
Several assumptions were made during the preparation of the synthetic data set that should be kept in mind when applying the model in practice. Most notably, the model predictions are highly influenced by the choice of the Bayless et al. (2020) directivity model, the fixed number of considered hypocenters per rupture, the assumed distributions of hypocenter locations and, as a consequence, the assumption of equal probability for bilateral and unilateral rupture propagation for strike-slip ruptures. We consider these assumptions reasonable for the development a globally applicable average model, however, we also note that on regional scale, more skewed distributions might better represent the regional characteristics where a preference for a particular rupture direction may be identified. For example, both theoretical considerations (Shi and Ben-Zion, 2006) and empirical evidence (Türker et al., 2022) hint toward preferred directions of rupture propagation along the North Anatolian fault zone close to Istanbul, which contradicts the previously mentioned assumptions. Moreover, a constant density of hypocenters along earthquake ruptures might be a worthwhile option to explore contrary to a fixed number of hypocenters per rupture. The specific form of such an alternative hypocenter distribution and the manner in which it would be calibrated given the available seismological data for a region remain an open question for the engineering seismological community to answer. We emphasize at this point that changing any of the assumptions mentioned above, requires the generation of an entirely new data set and the training of a new neural network. Considering the application of neural network based modifier of moments models in PSHA, where directivity is deemed important for the application in question we suggest to introduce additional branches into existing backbone models, such that both the consideration of directivity effects as such, but also the epistemic uncertainty of the underlying assumptions can be incorporated properly in the seismic hazard.
Summary and conclusions
In this study, we have developed a neural network–based model that takes as input the representation of an earthquake rupture and provides as output maps of modifiers for the moments of the ground motion distribution predicted by a ground motion model to account for directivity effects in the vicinity of the rupture. For training, we used a synthetic data set incorporating ruptures and corresponding precalculated moment modifiers from three different source models. The model operates on fixed sized areas of 1280 km × 1280 km at a cell size of (5 km)2. We find that the model yields good estimates of moment modifiers not only for simple planar ruptures, but also for more complex, branching ruptures with step-overs. Among several assumptions, the choice of symmetric hypocenter distributions and the choice of using the Bayless et al. (2020) directivity model for the generation of the synthetic data set has a direct influence on the predicted moment modifiers, which should be considered when applying the model in practice. From the validation of the model with earthquake ruptures that were not used during training we noticed a moderate variability of model performance, especially in explaining small scale details, that can be partially related to imperfections in the underlying synthetic data set. From the small number of affected ruptures, and the still reasonable model predictions on the large scale we conclude, however, that this variability does not critically affect the results of seismic hazard computations utilizing our model. Therefore we consider our model applicable to earthquake ruptures in PSHA, scenario hazard and risk analysis and possibly other applications on a global scale, as long as the seismic properties and the geometric complexity are comparable to those in the used training set. To confirm this finding, we successfully applied our model in a PSHA calculation for Turkey, using an experimental branch of the OpenQuake software. Considerable changes in the seismic hazard at the 475-year return period for
Supplemental Material
sj-pdf-1-eqs-10.1177_87552930251340668 – Supplemental material for Efficient incorporation of rupture directivity into probabilistic seismic hazard analysis using a deep learning–based approach
Supplemental material, sj-pdf-1-eqs-10.1177_87552930251340668 for Efficient incorporation of rupture directivity into probabilistic seismic hazard analysis using a deep learning–based approach by Henning Lilienkamp and Graeme Weatherill in Earthquake Spectra
Footnotes
Acknowledgements
The authors want to thank Jeff Bayless, Kyle Withers, Brian Chiou, Brian Kelly, and Paul Somerville for stimulating discussions, reviews, and valuable feedback on the research. In addition, the authors want to thank Fabrice Cotton for feedback and review of the original manuscript. This work utilized high-performance computing resources made possible by funding from the Ministry of Science, Research and Culture of the State of Brandenburg (MWFK) and are operated by the IT Services and Operations unit of the Helmholtz Centre Potsdam. Chat-GPT v.4o (![]() /) was used to rephrase some paragraphs to make them more easily accessible to the audience.
/) was used to rephrase some paragraphs to make them more easily accessible to the audience.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: We acknowledge support by the European Union’s Horizon 2020 Research and Innovation Programme (DT-GEO Grant 101058129).
Data and resources
Computation of the seismic hazard is undertaken using a customized version of OpenQuake (Pagani et al., 2014). The OpenQuake-compatible implementation of the Bayless et al. (2020) directivity model was verified and tested against code provided by the authors available at https://www.jeff-bayless.com/papers/. Maps shown in this article were constructed using QGIS available at https://qgis.org, Generic Mapping Tools (GMT v.6) available at https://www.generic-mapping-tools.org/, and Basemap (v.1.4.1) available at https://matplotlib.org/basemap/stable/. Topography and bathymetry shown in the maps is taken from the 2023 Gridded Bathymetric Dataset produced by the General Bathymetric Chart of the Oceans (GEBCO Bathymetric Compilation Group, 2023). Neural network training, inference, and optimization was implemented with Tensorflow (Abadi et al., 2015), whereas all other data analyses utilized the multiple tools from the Scientific Python ecosystem (Numpy, Scipy, Pandas, GeoPandas, Matplotlib, etc.) available at https://numfocus.org/. Some figures were designed with Inkscape available at https://inkscape.org/de/. The seismic source models utilized in this study are available via http://hazard.efehr.org/en/Documentation/specific-hazard-models/europe/eshm2020-overview/eshm20-seismogenic-sources/ (European Seismic Hazard Model 2020) and https://www.gns.cri.nz/research-projects/new-zealand-community-fault-model/ (New Zealand Community Fault Model). All websites were accessed last on 24 June 2024. The python codes developed within the scope of this study are available via Zenodo: https://doi.org/10.5281/zenodo.15118499. The final calibrated model from this study (model Mod9) is available for usage via pypi: ![]() /. The supplemental material to this article contains: S1—A figure and text illustrating the generation of moment modifiers, S2—Figures and text describing the training/validation data split using multidimensional scaling. S3—Text, figures, and tables with details regarding the U-Net architecture and training procedure. S4—The same figures presented in section “Model performance evaluation” for additional response periods. S5—Tables describing the model uncertainties obtained from misfits on validation samples. S6—A random selection of pairs of precalculated and reproduced moment modifiers from the validation data set. S7—Exploration of U-Net resolution uncertainty and impact. The synthetic data set utilized for training our model is reproducible with the information given in this manuscript. Due to its enormous size, the authors decided not to host it on a public repository. If needed, the authors are happy to provide additional information on the data generation workflow.
/. The supplemental material to this article contains: S1—A figure and text illustrating the generation of moment modifiers, S2—Figures and text describing the training/validation data split using multidimensional scaling. S3—Text, figures, and tables with details regarding the U-Net architecture and training procedure. S4—The same figures presented in section “Model performance evaluation” for additional response periods. S5—Tables describing the model uncertainties obtained from misfits on validation samples. S6—A random selection of pairs of precalculated and reproduced moment modifiers from the validation data set. S7—Exploration of U-Net resolution uncertainty and impact. The synthetic data set utilized for training our model is reproducible with the information given in this manuscript. Due to its enormous size, the authors decided not to host it on a public repository. If needed, the authors are happy to provide additional information on the data generation workflow.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.