
Abstract
This paper proposes a new multi-resource multi-stage mine production timetabling problem for optimising the open-pit drilling, blasting and excavating operations under equipment capacity constraints. The flow process is analysed based on the real-life data from an Australian iron ore mine site. The objective of the model is to maximise the throughput and minimise the total idle times of equipment at each stage. The following comprehensive mining attributes and constraints are considered: types of equipment; operating capacities of equipment; ready times of equipment; speeds of equipment; block-sequence-dependent movement times; equipment-assignment-dependent operational times; etc. The model also provides the availability and usage of equipment units at multiple operational stages such as drilling, blasting and excavating stages. The problem is formulated by mixed integer programming and solved by ILOG-CPLEX optimiser. The proposed model is validated with extensive computational experiments to improve mine production efficiency at the operational level.
Keywords
Introduction
Mining activities have been carried out by humans for millennia. Nowadays, mining activities take place all over the world and become a major source of a country's natural wealth, especially for Australia. Mining methods are mainly divided into two groups: open-pit/surface mining and underground mining. In underground mining, the mineral is able to be accessed and hauled to the surface through a network of tunnels. In comparison, open-pit mining method is implemented when deposits of minerals are found near the surface or where mine structure is inappropriate for tunnelling. This paper analyse the short-term open-pit mine production process including drilling, blasting and excavating stages.
In open-pit mining, the initial optimisation problem type at the strategic level, called mine design planning (MDP), aims to provide the optimal answer for the question, that is, what to be mined or what is the ultimate pit contour that yields the maximum total value based on the estimated geological information. By drilling in different locations during the process of mine exploration, samples of material are collected to estimate the distribution of mineral grades. To design a pit, the entire orebody is subdivided into block units and the value of each block unit is estimated by geostatistic information. Slope requirements (i.e., precedence relationship among block units) are regarded as the important constraints and must be satisfied in the MDP model. Subject to slope requirements, the common objective of MDP is to determine the ultimate pit contour that maximise the total value of a pit at the strategic level. As pioneers, Lerchs and Grossmann (1965) presented the methodology known as the Lerchs–Grossmann approach to the mining community. Caccetta and Giannini (1988) proposed several mathematical theorems in order to improve the Lerchs–Grossmann approach. Underwood and Tolwinski (1998) developed a dual simplex approach to solve the integer-linear-programming (ILP) model of MDP. Hochbaum and Chen (2000) presented a detailed study of the push-relabel network flow algorithm to solve MDP. Recently, some of extended MDP problems were investigated. For example, Epstein et al. (2012) extended the long-term open-pit MDP model to design an underground and open-pit sharing copper deposit by a capacitated multi-commodity network flow formulation. Asad and Dimitrakopoulos (2013) implemented a parametric maximum flow algorithm to solve an extend MDP problem with uncertain supply and demand. Nowadays, the basic MDP problem has been well defined and computationally tractable to be solved even for the very large MDP instances in today's computer technology. Owing to its simplicity and usefulness, the strategic-level 2D or/and 3D block models as well as Lerchs–Grossmann approach with its subsequent extensions and improvements have been extensively implemented in most off-the-shelf commercial mining software packages such as XPAC by Runge Pincock Minacro (2014), Vulcan by Maptek (2014), Datamine by CAE Mining (2014) and Gemcom by Whittle (2014).
After the determination of the ultimate pit contour, the next important optimisation problem type at the tactical level is called mine block sequencing (MBS). In the literature, it was also termed open-pit block sequencing (OPBS), precedence-constrained open-pit production scheduling (PCOPS) or constrained pit limit (CPIT) in the mining literature. However, the key binary decision variable in these problems is commonly defined as whether a block unit is selected to be mined in a time period or not. For convenience, we use the term ‘MBS’ to call this tactical-level problem throughout the paper. The basic MBS problem aims to decide which block units should be extracted over certain mid-term time periods so that the total net present value is maximised under the complicated precedence relationship of an ore deposit. In each time period, many additional constraints (such as the targets of destinations such as crushers, mill plants, waste dump points and stockpiles; blending with grade control; capacities of mining equipment; etc.) are usually considered in the extended MBS models. In the literature, the following important papers in leading OR journals dealt with basic MBS and its variants. Caccetta and Hill (2003) proposed a general mixed-integer-programming (MIP) model and a branch-and-cut algorithm with LP relaxation to solve MBS. Boland, Dumitrescu, Froyland and Gleixner (2009) developed a LP-based relaxation approach to solve large-size MBS instances. Bley, Boland, Fricke and Froyland (2010) relaxed this MIP formulation by adding inequalities derived by combining the precedence and production constraints. Ramazan (2007) proposed a method to aggregate a subset of block units as branched trees, which are able to reduce number of integer variables and number of constraints required within the MIP formulation. Many researchers indicated that solving the MBS–MIP model is computationally intractable for large-size instances, thus leading to the development of numerous heuristic algorithms. Kumral and Dowd (2005) developed a simulated annealing metaheuristic combined with Lagrangian relaxation. Ferland, Amaya and Djuimo (2007) modelled the MBS problem as a resource-constrained project scheduling problem, which was solved by a particle swam optimisation algorithm. Myburgh and Deb (2010) reported an application of evolutionary algorithm for solving MBS. Cullenbine, Wood and Newman (2011) recently developed a sliding-time-window heuristic for MBS. Chicoisne et al. (2012) developed an efficient heuristic algorithm based on decomposition and topological sorting techniques for solving MBS. Lamghari and Dimitrakopoulos (2012) presented a tabu search metaheuristic to solve the MBS problem with the consideration of metal uncertainty. Espinoza, Goycoolea, Moreno and Newman (2013) presented a library (i.e., benchmark data and results of varied-size instances) of open-pit mining problems including MDP and MBS (also called CPIT or PCPSP) to the mining community. Alonso-Ayuso et al. (2014) developed a stochastic MBS model with considering the uncertainty of ore prices, which was solved by transforming the stochastic representation into a mixed deterministic equivalent model. Lambert, Brickey, Newman and Eurek (2014) concluded a valuable tutorial of typical MBS (also called OPBS or CPIT) mathematical formulation models shown in the literature. Mousavi, Kozan and Liu (2014) developed a more comprehensive MBS model with the consideration of additional practical constraints such as capacities of excavators, grade control, blending, inventory levels of stockpiles, and rehandling and holding costs of stockpiles. Shishvan and Sattarvand (2015) developed an Ant Colony Optimisation (ACO) metaheuristic to solve an extended MBS-type problem applied in a Copper-Gold mine.
After the determination of block units to be mined over mid-term periods, mining practitioners need to know the answer of such an operational-level question, that is, how and when mining equipment at various operational stages (e.g., Drills, MPUs and Excavators) should be allocated to perform the detailed operations (e.g., Drilling, Blasting and Excavating) over a short time interval (Liu and Kozan 2012a, 2012b). This operational-level question is answered by a new short-term multi-stage mine production timetabling model in this paper. According to recent comprehensive literature review (Newman, Rubio and Weintraub 2010; Kozan and Liu 2011) on the applications of Operations Research approaches to mining industry, multi-resource multi-stage scheduling methodologies are rarely applied to mining optimisation in the mining literature (Kozan, Liu and Wolff 2013). According to our recent visits to Australian mines, we observed that mining practitioners would like to maximise the utilisation of their critical mining equipment units at various operational stages by implementing the optimum timetable, owing to the need of avoiding unnecessary downtimes and accounting for the availability at all times. In mining community, there are some commercial mine production scheduling software such as XACT by Runge Pincock Minacro (2014), MineMax Scheduler by MineMax (2014), MineSched by Geovia (2014) and Deswik Scheduler by Deswik (2014). As far as we know, they are still lack of advanced optimisation approach to obtain the optimal multi-stage timetable in open-pit mining. For example, in our visits to Australian iron mine sites, we also observed that the timetable of excavators are manually generated for the excavating stage by scheduling engineers and just displayed by graphic interfaces of XACT software. Using the sequence of tactical-level block units over mid-term periods (i.e., regarded as the given due dates of block units) by MBS, a multi-stage mine production timetabling (MMPT) model is developed to optimise multi-stage operational-level timetable with multiple resource units, i.e., how and when the mining equipment will be allocated to the selected block units to perform the mining tasks at various operational stages over a shorter time interval. In a sense, this paper fills this gap to extend the boundary of the development of more advanced scheduling methodology at the operational level.
Mathematical programming
The MMPS problem is defined according to the flow process of short-term mine production processing stages under a real-life mining project. This flow process is analysed based on observations, historical data and feedbacks from an Australian ore mine site. In the block model at strategic exploration, a ‘block unit’ is regarded as the smallest element with 10 m in width, 10 m in length, and 15 m in height. At the operational level, a set of several same-grade block units on the same bench in the same pit are aggregated to be mined at the same production rate. In this paper, such an aggregation of block units is defined as a ‘mining job’ in our MMPS model. The main purpose of such an aggregation is to provide enough working area for one equipment unit in open-pit mining process owing to the necessary swing angles and the positioning space. For example, a typical open-pit excavator's working range is over 40 m and provides about 60 mt nominal payload capacity (CAE Mining 2014). Each mining job should be processed in terms of a given processing route of ‘operational stages’ such as drilling, blasting and excavating and by the allocation of specific mining equipment units. In the drilling stage, the block units in each mining job are drilled by drills in order to collect the samples for blasting, which are sent to laboratories for checking ore properties such as ingredients and density. The sampling results are used to determine blasting patterns for achieving a good fragmentation after blasting. Mobile Processing Units (MPUs) provide exploding equipment and blasting service at the blasting stage. At the excavating stage, blasted block units are extracted by excavators (shovels or front-end-loaders).
According to the above analysis, the following model is formulated to optimise open-pit drilling, blasting and excavating operations for maximising throughput and reducing the idle time of equipment units at each stage.
Indices and parameters
number of mining jobs in an operational time horizon. index of a mining job indexed from 1, i = 1, …, I; i = 0 is a dummy mining job. The dummy job has zero quantity in volume, surface and drilling metres, which is used to complete the constraint of sequence-dependent movement time for determining virtual movement distances of the first/last mining jobs. number of operational stages. index of an operational stage from 0, k = 0, …, K (1. number of equipment units used at stage k. index of an equipment unit at stage k indexed from 0, lk = 0,…,Lk(1. ready time of mining job i. due date of mining job i. weighting factor associated the tardiness of mining job i setup time of mining job i by equipment unit lk at stage k workload for mining job i at stage k operating capacity of resource unit lk at stage k distance between mining job i and mining job i, in which i′ should be the immediate predecessor of mining job i speed of the a constant large value ,
, ,
, ,
, equipment unit at stage k from mining job i′ to mining job i, which may be asymmetric due to up-slope or down-slope
equipment unit at stage k from mining job i′ to mining job i, which may be asymmetric due to up-slope or down-slope
Decision variables
Cik completion time of mining job i at stage k; 0 ≤ Cik ≤ U, I = 0, …, I; k = 0,…,K–1

 equipment unit is allocated to mining job i at stage k; 0, otherwise;
equipment unit is allocated to mining job i at stage k; 0, otherwise; 
 immediate sequencing variable which equals 1, if mining job i′ just precedes mining job i on the
immediate sequencing variable which equals 1, if mining job i′ just precedes mining job i on the  equipment unit at stage k; 0, otherwise;
equipment unit at stage k; 0, otherwise; 
The following multi-stage mine production timetabling model is formulated to optimise multi-stage operational-level timetable with multiple resource units:
Objective

Subject to



 of the allocated equipment unit (indexed lk) to this mining job as well as its corresponding setup time and processing time
of the allocated equipment unit (indexed lk) to this mining job as well as its corresponding setup time and processing time  at stage k
at stage k





Case study
The proposed mathematical formulation model has been solved by commercial MIP optimiser (e.g., IBM ILOG-CPLEX 12.4 for academic use). The proposed approach has been applied to a case study based on the data collected from an iron ore mine site in Australian, for the purpose of maximising the throughput of short-term open-pit mine production process through several operational stages.
Owing to confidentiality agreement, values are relatively modified and only some parts of the case study data are given in Table 1.
Input data of 54 mining jobs*
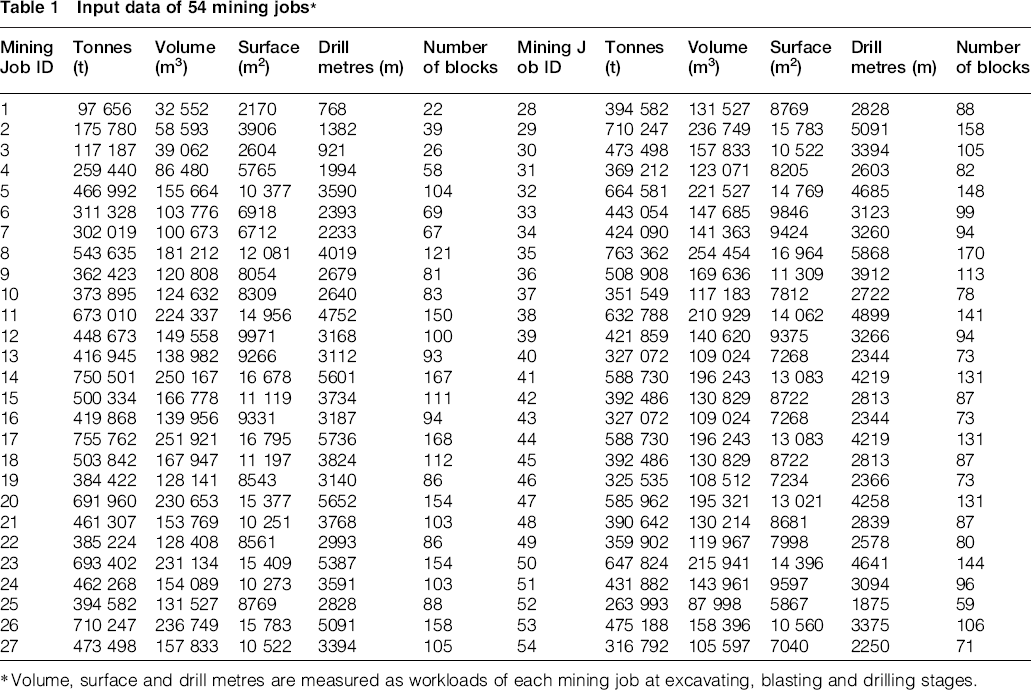
Volume, surface and drill metres are measured as workloads of each mining job at excavating, blasting and drilling stages.
In this case study, 54 mining jobs will be scheduled in an expected 18-week operational scheduling horizon. Note that a mining job is an aggregated set of block units each of which has the identical size with 10 m in width, 10 m in length, 15 m in height, about 100 m2 in surface and about 1500 m3. If a block unit is high-grade ore with the density of 3 t/m3, then this block unit's tonnage is about 4500 t. For example in Table 1, mining job 1 has 32 552 m3 and 2170 m2 on surface, which means that it consists of about 22 block units. Each mining job will be processed consecutively through drilling; blasting and excavating stage. The critical equipment type at drilling stage is drill equipment with two units in this case study. The average blast-hole-drilling rate of a drill is 50 m/h at this mine site. At blasting stage, the critical resource type is MPU with two units. Owing to the safety requirements for subsequent marking, the blasted block units, this mine site does not allow personnel or equipment on a blast about 12 h. The processing time of a blasting operation actually contains operational times of several tasks including sampling, explosive adding, exploding, clearing and marking. The critical resource type at excavating stage is excavator (shovel or front-end-loaders) with 5 U and the production rate of an excavator unit is 1200 m3/h on average. Based on the above data, the processing times of each mining job are determined by the size (drilling meter, surface, volume) of each mining job and the operating capacity of an allocated equipment unit at each stage.
Results
The MMPS MIP model of this case study is solved by IBM ILOG-CPLEX 12.4 with the time limit of 36 000 s and thus a good feasible mine production timetable that synchronises drilling, blasting and excavating operations of each mining job is obtained and presented in detail in Table 2. IBM ILOG-CPLEX (a commercial MIP optimiser) can indicate whether the proposed MIP model is solved or not as well as the MIP solution's relative optimality gap. The constraints are satisfied by evaluating the values of key variables in the model, that is, whether only an equipment unit at each stage is assigned only to a mining job at a time; and whether each pair of mining jobs has only one directed immediate sequencing relationship on the assigned equipment unit at each stage. The obtained timetable shown in Table 2 is constructed according to the values of completion times Cik, equipment-assignment variables  , sequencing variables
, sequencing variables  obtained by ILOG-CPLEX.
obtained by ILOG-CPLEX.
An operational-level mine production timetable of 54 mining jobs*
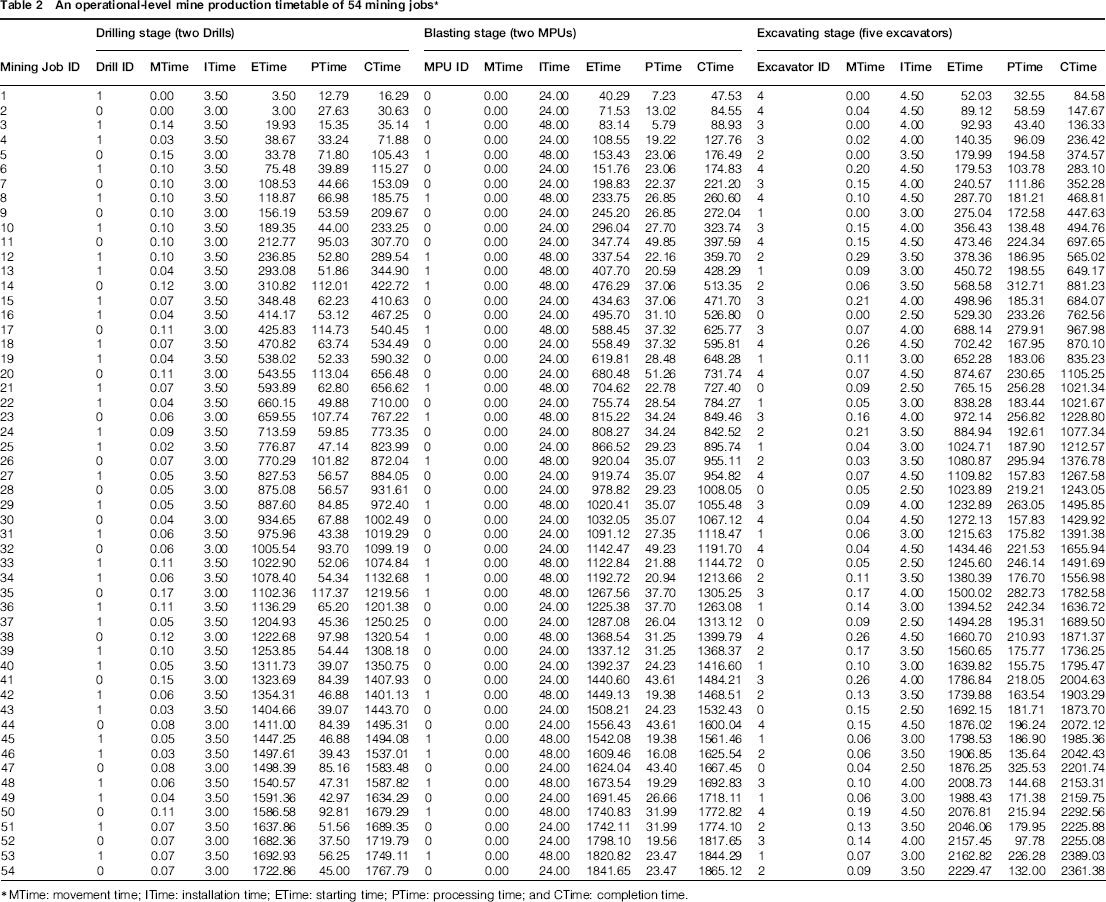
MTime: movement time; ITime: installation time; ETime: starting time; PTime: processing time; and CTime: completion time.
Conclusion
This paper is a pioneer work to optimise short-term mine production operations due to the fact that most mining optimisation papers dealt with long-term mine design planning at the strategic level and mid-term mine block sequencing at the tactical level. In this sense, it is innovative to model a short-term operational-level mine production timetabling process as a multi-resource multi-stage scheduling problem.
In this paper, such a complicated operational multi-resource multi-stage mine production timetabling problem is defined and then mathematically formulated by mixed integer programming. The proposed MIP model can be solved by IBM ILOG-CPLEX optimiser. A numerical case study is given for illustrating and validating the proposed timetabling methodology with a practical implementation based on real-life mining data. As a result of the application of the proposed methodology, mining practitioners can maximise the mining productivity and the utilisation of mining equipment through multiple processing stages.
For the direction of future research, a hybrid metaheuristic algorithm based on an extended disjunctive graph will be developed to solve the proposed multi-resource multi-stage mine production timetabling problem in a more efficient way.
Acknowledgement
The authors would like to acknowledge the support of CRC ORE, established and supported by the Australian Government's Cooperative Research Centres Programme.