
Abstract
Earthquake-resistant design guidelines commonly prescribe that when conducting seismic response analyses: (i) a minimum of three ground motions can be used; (ii) if less than seven ground motions are considered, the maximum of the responses should be used in design; and (iii) if seven or more ground motions are considered the average of the responses should be used in design. Such guidelines attempt to predict the mean seismic response from a limited number of analyses, but are based on judgment without a sound, yet pragmatic, theoretical basis. This paper presents a rational approach for determining design seismic demands based on the results of seismic response analyses. The proposed method uses the 84th percentile of the distribution of the sample mean seismic demand as the design seismic demand. This approach takes into account: (i) the number of ground motions considered; (ii) how the ground motions are selected and scaled; and (iii) the differing variability in estimating different types of seismic response parameters. A simple analytic function gives a ratio which, when multiplied by the mean response obtained from the seismic response analyses, gives the value to be used in design, thus making the proposed approach suitable for routine design implementation.
Introduction
The consistent determination of design seismic demands on structures and other engineered facilities via seismic response analyses requires the consistent development and implementation of: (i) “target” ground motion intensity measures and/or seismic response spectra for ground motion selection; (ii) consistent selection of ground motion records in accordance with this “target”; and (iii) consistent interpretation of the results of the seismic response analysis using the selected ground motions for seismic design. This manuscript deals solely with the latter of the above three points, but it must be made clear that without the former two, consistent seismic design via the use of seismic response analyses cannot be achieved.
Variability in seismic response analyses using different input ground motions which match some predetermined “target” intensity measure (e.g., spectral acceleration response spectra) occurs because both the system response and input ground motion are significantly more complex than the simple “target” intensity measure upon which the ground motions are selected. Just as uncertainties are explicitly accounted for in probabilistic seismic hazard analysis (PSHA; Cornell 1968, SSHAC 1997), from which “target” ground motion intensity measures and design response spectra are commonly obtained, uncertainties also need to be considered in seismic response. In rigorous performance assessments, this “record-to-record variability” in seismic response as well as many other uncertainties are typically explicitly accounted for (Cornell et al. 2000). Conversely, in less rigorous assessments, the aim is typically to use seismic response analysis results to obtain a deterministic measure of seismic demand for the design and/or simple verification of different components in the system.
Modern seismic design guidelines recognize the variability in seismic demands estimated using seismic response analysis with different input ground motions. Typically such guidelines (e.g., Eurocode 8, Part 1 (CEN 2003), FEMA 368 2001, ASCE 7-05 2006, ASCE 4-98 2000, NZS1170.5 2004) state one or more of the following points in the presence of this variability: (i) a minimum of three ground motions should be considered; (ii) if less than seven ground motions are considered then the maximum response should be considered; and (iii) if seven or more records are considered, the average demand may be adopted. Clearly the above guidelines, which are based on engineering judgement, seek to estimate (sometimes conservatively) the mean seismic demand, despite the fact that this mean seismic demand is estimated from a limited number of plausible ground motions.
The above guidelines have however several important deficiencies in their use in engineering design: (i) they address variability in seismic response in a deterministic manner and as a result it is not clear, for example, what is the likelihood that the maximum of three seismic response analyses is smaller than the “true” mean seismic response; (ii) they provide no explicit incentive for conducting larger (i.e., greater than seven) numbers of seismic response analyses, something which is now routinely possible considering the time to conduct analysis versus the time to develop and validate a seismic response model; (iii) they do not directly provide any motivation for reducing uncertainty in seismic response analyses by careful ground motion selection (Baker et al. 2006, Bradley et al. 2009a, Hancock et al. 2008); and (iv) they do not account for the fact that some measures of seismic response are significantly more sensitive to the input ground motion than others (i.e., have a higher variability; e.g., Hancock et al. 2008).
This manuscript presents a simple method for determination of seismic demands based on the distribution of the sample mean of the seismic response analyses. Firstly, the unknown likelihood in the conventional approach, that the maximum of three seismic response analyses is less than the “true” seismic demand, is examined. Secondly, the proposed methodology based on the distribution of the sample mean is discussed and it is explained how it accounts for the four aforementioned deficiencies of the current approach. A simple analytic expression is then derived which can be used to obtain the design seismic demand by combining it with the estimated mean seismic demand.
Estimation of the Mean Seismic Demand
As previously mentioned, design guidelines are interpreted to focus on the estimation of the average seismic demand (Baker et al. 2006, Hancock et al. 2008, Watson-Lamprey 2006). There are three such measures of “average” which are used in earthquake engineering: the arithmetic mean, the geometric mean and the median. Hancock et al. (2008) mention that based on presentations by, and discussions with, U.S. code drafters, it is clear that the arithmetic mean is the intended definition of “average” used. For this reason, the term “average seismic response” or “mean seismic response” in the remainder of this manuscript refers to the arithmetic mean seismic response. It should also be noted that for any given set of observations (which have positive skewness) the arithmetic mean will always be larger than the geometric mean.
Another premise in the analysis conducted in this manuscript is that variability in seismic demand due to different input ground motions can be represented by a lognormal distribution. This assumption has been widely demonstrated to be statistically justified, for example in Shome and Cornell (1999),Aslani and Miranda (2005), Mander et al. (2007), and Bradley et al. (2009b), among others. The lognormal distribution is also desirable in that it is completely defined by its first two moments, μlnX and

If a limited number of ground motions are considered (from a potentially infinite number of plausible motions) in seismic response analyses, then the estimation of the mean seismic demand based on this limited number of analyses is uncertain. Figure 1a illustrates a lognormal probability density of some measure of seismic demand, denoted as X. Also shown are values of X obtained from seven seismic response analyses (denoted as “random realisations” in Figure 1a. From these seven realisations of X the sample mean of X can be computed, as an approximation of the true mean of X (which in general is unknown, but is 0.02 in this example), as shown in Figure 1b. By repeating such computations for different sets of seven realisations the probability mass function of the sample mean in Figure 1b can be obtained. For the particular realisation shown in Figure 1, it is observed that the sample mean is smaller than the “true” mean of X.
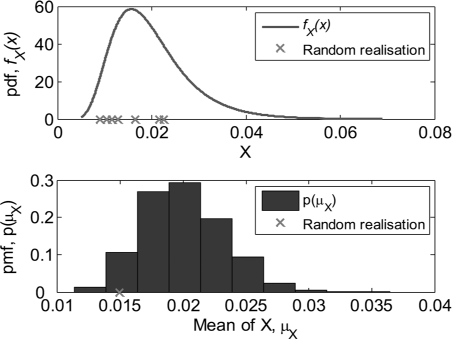
Illustration of the uncertainty in the prediction of the sample mean of X: (a) probability density function (pdf) of X and random realizations; and (b) probability mass function (pmf) of the sample mean of X and one realization.
In order to understand the factors influencing the distribution of the arithmetic sample mean of X (where X is a lognormal random variable), a similar problem for which an analytical solution is possible is considered. In the case of estimating the sample mean of lnX, where X has a lognormal distribution with known variance,
In the case of determining the distribution of the arithmetic sample mean of X (which has a lognormal distribution), as is the case of interest here, no simple analytic solution is possible, although several approximations have been attempted (Lam et al. 2006, Lord 2006). Thus in the remainder of this manuscript Monte Carlo simulation, similar to that discussed with reference to Figure 1 is adopted. The analytical result presented in the previous paragraph is used to understand the variation in parameters that is necessary in the Monte Carlo simulations.
Distribution of the Maximum of Three Response Analyses
As previously mentioned, many seismic design guidelines specify that the seismic demands on a system can be estimated based on the maximum of as little as three seismic response analyses. In this section, the ratio of the maximum of three seismic response analyses to the “true” mean seismic demand is investigated.
Monte Carlo simulation was used to examine the distribution of the maximum of three seismic response analyses as follows: (1) given a seismic demand measure, X, with prescribed lognormal mean and standard deviation, μlnX and σlnX, respectively, generate a sample of three random realisations, xi1,xi2,xi3; (2) take the maximum of these random realisations and divide by the mean (μX), i.e., Ri=max(xi1,xi2,xi3)/μX; (3) repeat steps (1) and (2) Nsim number of times; and (4) with the Nsim Ri values form an empirical cumulative distribution function (CDF) of Ri.
A value of Ri < 1 represents the case of interest here in which the maximum seismic demand from three seismic response analyses is less than the “true” mean seismic demand, μX. Also, because of the normalisation by μX in the definition of Ri it can be shown that Ri is independent of μX. Therefore one needs only to examine the effect of the lognormal standard deviation, σlnX, on Ri. Figure 2 illustrates the empirical CDFs of Ri for various values of σlnX. The empirical CDFs shown were obtained based on Nsim = 50,000 Monte Carlo simulations. It can be seen that, as would be expected, the distribution of Ri is a function of σlnX. Furthermore, the cumulative probability of Ri < 1 is also a function of σlnX. That is, the probability of the maximum of three seismic response values being less than the “true” mean seismic response depends on the lognormal standard deviation of the response measure. For a lognormal standard deviation range of σlnX = 0.2–0.8, Figure 2 illustrates that this probability ranges from 0.15–0.28. Thus, over this reasonable range of σlnX the probability of the maximum of three seismic response analysis results being less than the underlying mean varies by a factor of 2. If one examines a “very uncertain” seismic demand measure then the probability of Ri < 1 increases further. For example, in the case of column fatigue damage, which Hancock et al. (2008) find for one application has σlnX = 1.232, the probability of Ri < 1 is approximately 0.4 (i.e., a 40% chance that even the maximum of three samples is less than the true mean).
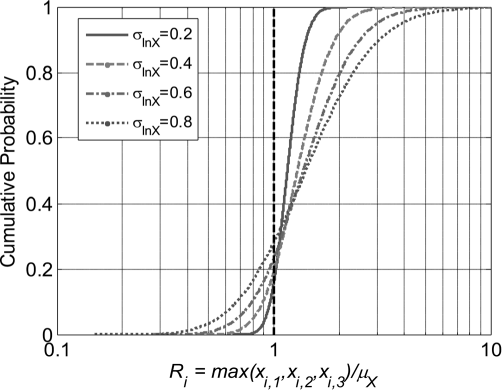
Distribution of the ratio of the maximum of three random realisations to the arithmetic mean of a lognormal distribution for various lognormal standard deviations.
Clearly such a variable probability of Ri < 1 is undesirable and is a shortcoming of the current design prescriptions. The method for determination of seismic demands via seismic response analysis proposed in the following section, by definition, has a fixed probability that the design seismic demand is less the “true” mean value.
Determination of Seismic Demand Values Using the Distribution of the Sample Mean
It is proposed here that the distribution of the sample mean obtained from the results of seismic response analyses be used to determine the design seismic demand. This proposal is based on the fact that, as previously mentioned, current code guidelines are oriented toward the prediction of the mean seismic demand. It is further proposed that the 84th percentile of the distribution of the sample mean is used as the design seismic demand. Why the 84th percentile in particular? The use of the 84th percentile of a distribution has frequently been used to obtain deterministic design values in related topics such as seismic hazard analysis. Also, while it is by no means a reason for adopting the 84th percentile, it is noted that such a proposal gives a constant 16% probability of the design seismic demand being less than the true mean seismic demand. This probability of exceedance is comparable to the 15%-28% observed in Figure 2, relating to the maximum of three responses. Thus, it is envisaged that the use of a larger percentile (e.g., the 95th percentile) would be overly conservative relative to current approaches.
The proposal of using the 84th percentile of the sample mean as the design seismic demand has several repercussions. These repercussions are examined in detail in this section, however they are immediately stated here in response to the limitations of conventional seismic design guidelines discussed in the introduction:
i) The method is based on probability theory. Hence, there is a known likelihood of the true mean being above the design value (equal to 16% if the 84th percentile is adopted as proposed herein). ii) As shown in Equation 4 and Figure 3 to follow, the standard deviation of the distribution of the sample mean reduces (and hence so does the ratio of the 84th percentile relative to the “true” mean) as the number of ground motions used in seismic response analyses increases. As a result there is a clear benefit of performing additional seismic response analyses.
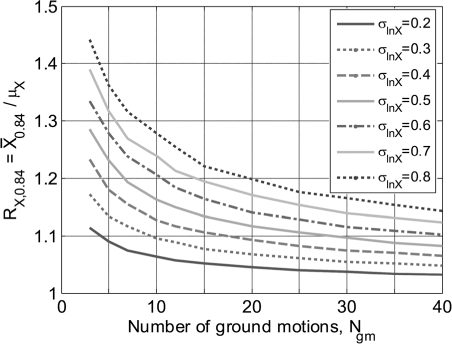
Ratio of the 84th percentile of the distribution of the sample mean to the underlying true (i.e., population) mean as a function of the lognormal standard deviation and number of ground motions considered. iii) As shown in Equation 4 and Figure 3, the ratio of the 84th percentile of the sample mean to the “true” mean reduces with reducing uncertainty in the results of seismic response analyses. There is therefore a clear benefit of reducing uncertainty in the results of seismic response analyses via “careful” ground motion selection (e.g., Baker et al. 2006, Bradley et al. 2009a, Hancock et al. 2008). iv) The influence of uncertainty in the results of seismic response analyses on the ratio of the 84th percentile of the sample mean to the “true” mean, RX,0.84, also means that the proposed method accounts for the fact that some seismic response measures are more uncertain than others (e.g., Hancock et al. 2008).
84TH PERCENTILE SAMPLE MEAN DISTRIBUTION RATIO
To illustrate the implications of the procedure described above Monte Carlo simulation was used. Based on the theoretical distribution of the sample mean of lnX previously discussed, the influential parameters in defining the distribution of the sample mean of X are: μX and σlnX (which uniquely define the lognormal distribution of X) and the number of ground motions (i.e., independent observations), Ngm. In order to reduce the number of influential parameters the variable RX,0.84, defined as the ratio of the 84th percentile of the distribution of the sample mean (denoted as X¯0.84) divided by μX itself, i.e., RX,0.84=X¯0.84/μX was examined. It was verified by Monte Carlo simulations that RX,0.84 is independent of the value of μX.
The Monte Carlo procedure to investigate the dependence of RX,0.84 on σlnX and Ngm was therefore: (1) given μX, σlnX and assuming a lognormal distribution, generate Ngm random values Xi,1,…,Xi,Ngm and determine the sample mean, X¯ i ; (2) repeat step (1) Nsim times and form an empirical CDF of X¯ i from which the 84th percentile, X¯0.84, can be identified and divided by μX to obtain RX,0.84; (3) repeat steps (1) and (2) for all σlnX, Ngm values of interest.
Figure 3 illustrates the results of the Monte Carlo simulation procedure described above (Nsim = 50,000) to determine RX,0.84 over the range 0.2 ≤ σlnX ≤ 0.8 and 3 ≤ Ngm ≤ 40. It can be seen that, as one would expect, the variable RX,0.84 increases with increasing σlnX and reduces with increasing Ngm.
Uncertainty in the Sample Standard Deviation
The use of Figure 3 to determine RX,0.84 requires a value of σlnX to be specified. However, in practice the exact value of σlnX is not known, and must be estimated from the sample standard deviation, slnX. Given that that quotient,
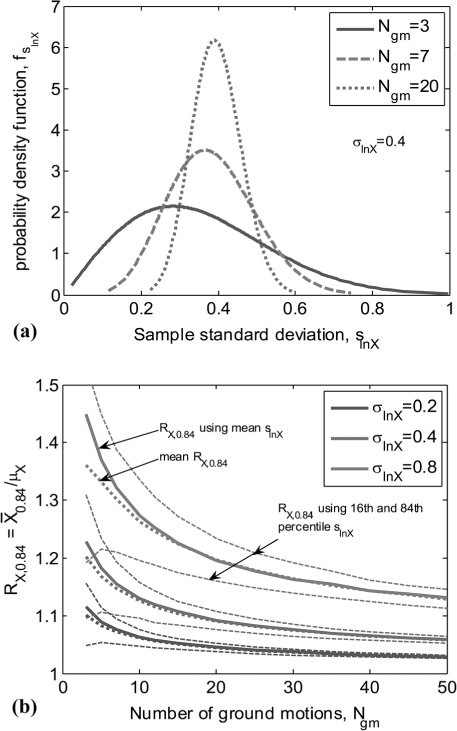
(a) The distribution of the sample standard deviation for various numbers of ground motions records; and (b) the effect of uncertainty in the sample standard deviation on the ratio of the 84th percentile of the distribution of the sample mean to the underlying true (i.e., population) mean.
Figure 4b illustrates the effect of the uncertainty in slnX on the computed value of RX,0.84 for σlnX = 0.2, 0.4, and 0.8. For each value of σlnX, RX,0.84 was computed using (i) the mean value of slnX (i.e., Figure 3); (ii) the 16th and 84th percentiles of slnX; and (iii) the mean value of RX,0.84 obtained by numerically evaluating the integral:

Approximation of RX,0.84 BY SIMPLE PARAMETRIC EQUATIONS
To make the results discussed in the previous sections more easily applied in a design environment it is desirable to have a mathematical expression of the mean of RX,0.84 as a function of slnX and Ngm. In order to provide theoretical robustness of such an expression use is made of the theoretical solution of the distribution of the sample mean of lnX when σlnX is known (not the sample mean of X for unknown σlnX that is considered here). As previously mentioned, the distribution of
Based on the analytical expression of RlnX,0.84 given in Equation 3, a similar functional form for the mean value of RX,0.84 was sought. It was found that the following equation provides an adequate compromise between accuracy and simplicity:

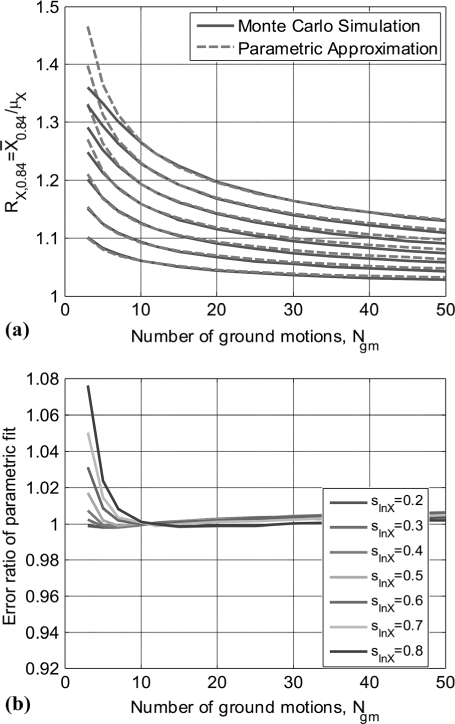
Accuracy of the parametric fit given by Equation 4: (a) plotted against the mean value of RX,0.84 from the Monte Carlo simulations; and (b) the error ratio compared with Monte Carlo simulation.
Procedure to Obtain Design Seismic Demands
Using the results and discussion in the previous sections the proposed procedure for determination of design seismic demands in a serial fashion is.
Step 1: Based on a pre-determined Ngm ground motion records perform Ngm seismic response analyses using the numerical model of the system. Step 2: From the Ngm seismic response analyses obtain the values of one or more seismic demand parameters of interest, (i.e., X1,…,XN
gm
for each response parameter of interest). Compute the arithmetic sample mean, X¯, and lognormal standard deviation, Step 3: Compute RX,0.84 as given by Equation 4 and then obtain the design seismic demand from Equation 7:



It should be noted that Equations 5 and 6 are “built-in” functions in most programs used in a engineering design environment. For example, “AVERAGE()” and “STDEV()” are the Microsoft Excel functions used for executing Equations 5 and 6. Therefore the three steps outlined above require the same amount of effort as determination of the maximum and average values which are required by the aforementioned design guidelines.
Conclusions
This paper has presented a rational, probability-based approach for determining design seismic demands based on the results of seismic response analyses. The proposed method uses the 84th percentile of the distribution of the sample mean as the design seismic demand. The method therefore takes into account: (i) the number of ground motions considered; (ii) how the ground motions are selected and scaled; and (iii) the differing variability in estimating different types of seismic response parameters. A simple three-step procedure was explained by which the design seismic demand can be obtained using the proposed approach, thus making it suitable for routine design implementation.