
Abstract
Intuitionistic fuzzy transform is an approximate method based on the intuitionistic fuzzy partition. To begin with, a novel definition of intuitionistic fuzzy partition is given, and the properties of triangular intuitionistic fuzzy partition are also given. Secondly, the method of intuitionistic fuzzy transform is introduced, which transforms a continuous function into two gravity vectors according to the membership and non-membership functions that based on intuitionistic fuzzy partition. Some fundamental properties of intuitionistic fuzzy partition are surveyed. Thirdly, the method of inverse intuitionistic fuzzy transform is established by using the previous gravity vectors corresponding to the intuitionistic fuzzy partition. The results show that the approximate function of the original one can be rebuilt by the membership and non-membership functions respectively. even a hybrid approximate function can be rebuilt by both the membership and non-membership functions. Finally, some elementary properties of the inverse intuitionistic fuzzy transform are studied and the method is illustrated by a specific example.
Keywords
Introduction
Since the fuzzy set was first proposed by Zadeh [29] in 1965, fuzzy modeling, as the resulting methodology of fuzzy set, became a very effective and flexible technique for the solution of complex practical application. Among which, fuzzy transform (F-transform) is the most popular one and has attracted considerable attention in the fuzzy theory community. F-transform has solved many problems such as data analysis [7, 21], images processing [18, 24] and differential equations solving [13, 14], et al.
F-transform was proposed by Perfilieva in [16, 17]. It was an operator which transforms a continuous function on an interval [a, b] into a n-dimensional vector by taking advantage of fuzzy partition. It offers a new setting to obtain fine approximation of functions of single and multiple variables. On the contrary, an inverse F-transform(i-F-transform) converts a n-dimensional vector into a new continuous function which approximates the original one. The advantage of i-F-transform is that the approximate function is more simple and easy to compute than the original one. The membership degree plays a key role in both F-transform and i-F-transform, especially for fuzzy number, which is a special case of fuzzy set [6, 9].
Because of the complexity of data and the ambiguity of human mind, it is difficult to make use of a membership degree function to characterize the accurate membership degrees in the classical fuzzy set theory. As an extension of Zadeh’s fuzzy set, Atanassov introduced the concept of intuitionistic fuzzy set (IFS) in [1–3]. IFS fully reflects the ambiguity of things. IFS may express more abundant and flexible information as compared with the fuzzy set [28]. For example, it can express support, objection, and hesitation in reality. Up to now, the studies of IFS have attracted great attention and have been applied to various fields, such as clustering analysis, decision making, medical diagnosis, pattern recognition, and so on.
Nevertheless, there is no literature to discuss the method of intuitionistic fuzzy transform as far as we know. The question is how to establish the intuitionistic fuzzy transform. For this reason, the main purpose of this paper is to establish the direct and inverse intuitionistic fuzzy transform by IFS theory. Thus, the advantage of IFS in dealing with uncertain and vague information, allows us to obtain the more powerful approximate function which can substitute the original one.
The paper is organized as follows. In Section 2, we remind necessary basic concepts of intuitionistic fuzzy set, triangular intuitionistic fuzzy number, intuitionistic fuzzy partition and their fundamental properties. In Section 3, motivated by earlier research, we propose the intuitionistic fuzzy transform and study some basic properties of it. In Section 4, we present the inverse intuitionistic fuzzy transform. Finally, we draw the conclusions and give a specific example to illustrate our method.
Preliminaries
In this section, we give a brief review of some preliminaries.
Intuitionistic fuzzy set, intuitionistic fuzzy number and triangular intuitionistic fuzzy number
To begin with, we introduce some basic notions related to IFSs.
Intuitionistic fuzzy set was extended naturally from fuzzy set by adding an additional non-membership degree, which may express more abundant and flexible information as compared with the fuzzy set.
As a extension of fuzzy numbers, an intuitionistic fuzzy number (IFN) is easier to deal with the fuzzy and the uncertain information. Recently, the researches on IFNs have received a little attention and several definitions of IFNs and ranking methods have been proposed [5, 27]. For the purpose of describing fuzzy information, the results can be expressed by some special forms of IFNs, such as triangular intuitionistic fuzzy numbers(TIFNs), trapezoidal intuitionistic fuzzy numbers(TrIFNs).
The triangular fuzzy number(TFN) was first introduced by Dubois and Prade [9]. The concept of a TIFN is defined in a similar way as follows:
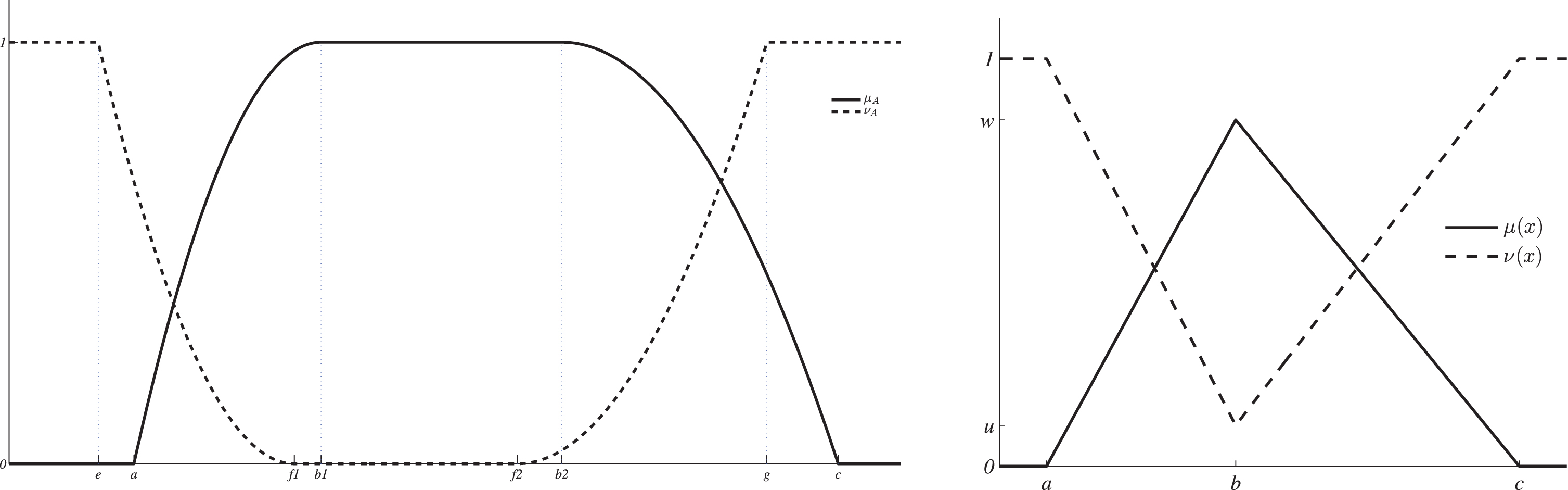
An IFN and a TIFN 〈 (a, b, c) ; w, u〉.
In this paper, we denote a TIFN by A = 〈 (a, b, c) ; w, u〉, where w represents the maximum degree of membership and u represents the minimum degree of non-membership such that satisfied 0 ≤ w, u ≤ 1 and 0 ≤ w + u ≤ 1.
Intuitionistic fuzzy partition (IF-Partition) plays a vital role in both direct and inverse intuitionistic fuzzy transform(i-IF-transform). Being similar to the definition of IF-Partition in [25, 26], we give another novel one as follows:
μ
k
, ν
k
: [a, b] → [0, 1]; μ
k
(x) and ν
k
(x) are continuous functions on [0, 1]; μ
k
(x) , k = 2, …, n, strictly increases on [xk-1, x
k
] and strictly decreases on [x
k
, xk+1]. ν
k
(x) , k = 2, …, n, strictly decreases on [xk-1, x
k
] and strictly increases on [x
k
, xk+1];
| {k|μ
k
(x) + ν
k
(x) ≤1, x ∈ [a, b]} |≤1(i.e., there is at most one IFS such μ
k
(x) + ν
k
(x) ≤1).
For the rest of this paper,
Let us consider an example of TIF-Partition on [a, b].
If k = 1, then
If k = 2, 3, …, n − 1
If k = n, then
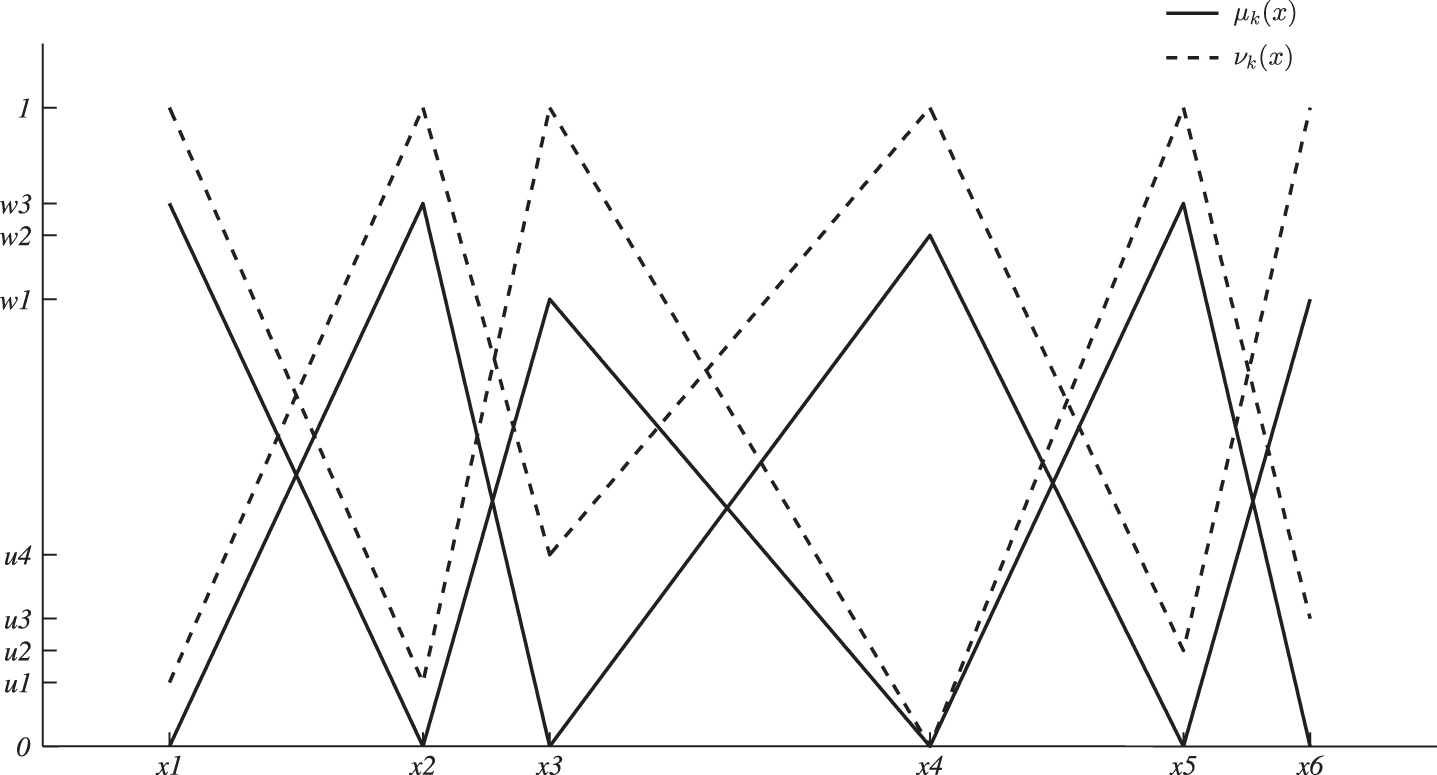
TIF-Partition on [a, b].
Fig. 2 shows a non-uniform TIF-Partition on [a, b].
On the other hand, according to Equations (5) and (6) and Theorem (2.1), we obtain
Therefore, the proof is completed by comparing the above formulas.□
μ
k
(x
k
− x) = μ
k
(x
k
+ x) , ν
k
(x
k
− x) = ν
k
(x
k
+ x), ∀x ∈ [0, h] , k = 1, …, n; μ
k
(x) = μk+1 (x + h) , ν
k
(x) = νk+1 (x + h), ∀x ∈ [x
k
, xk+1] , k = 1, 2, …, n − 1.
For the rest of this paper,
In this section, we introduce the method of intuitionistic fuzzy transform (IF-transform), which transforms a continuous function f on [a, b] into two sets of n-dimensional gravity vectors, corresponding to the membership and non-membership.
IF-transform
It is worth noticing that IF-transform establishes a correspondence between a set of continuous functions on an interval of real numbers and the set of n-dimensional (real) vectors.
The k-th element of
The k-th element of
In contrast to IF-transform, the method of inverse intuitionistic fuzzy transform (i-IF-transform) turns the two sets of gravity vectors into an approximate functions of the original function f.
The IF-transform converts a continuous function f on [a, b] with the IF-Partition
If α = 0, then If α = 1, then
Generally speaking, due to the loss of information, it results in that μ
k
(x) + ν
k
(x) notequiv1 in IF-Partition
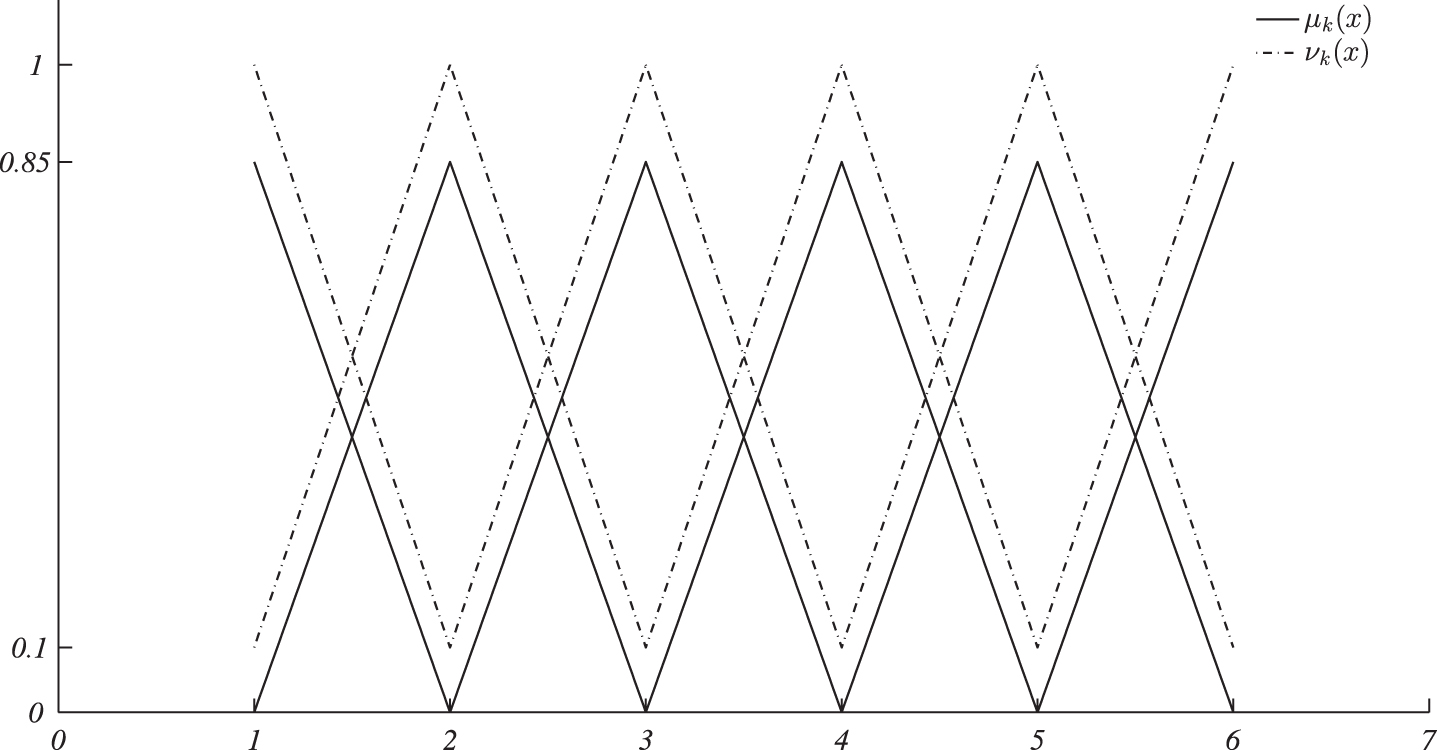
UTIF-Partition of [1, 6] when n = 6, w = 0.85, u = 0.10
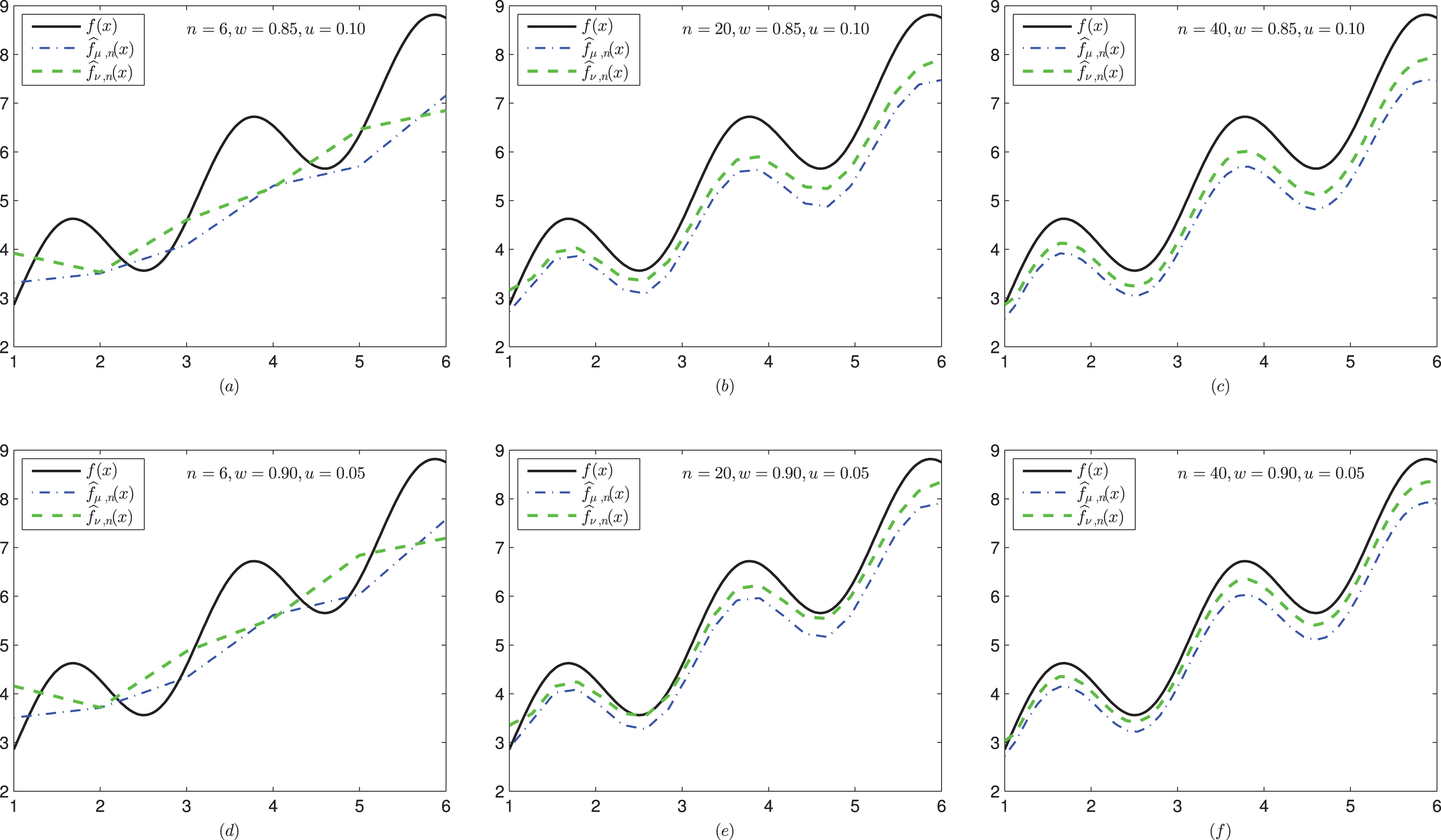
Two i-IF-transforms with respect to n = 6, 20, 40, respectively.
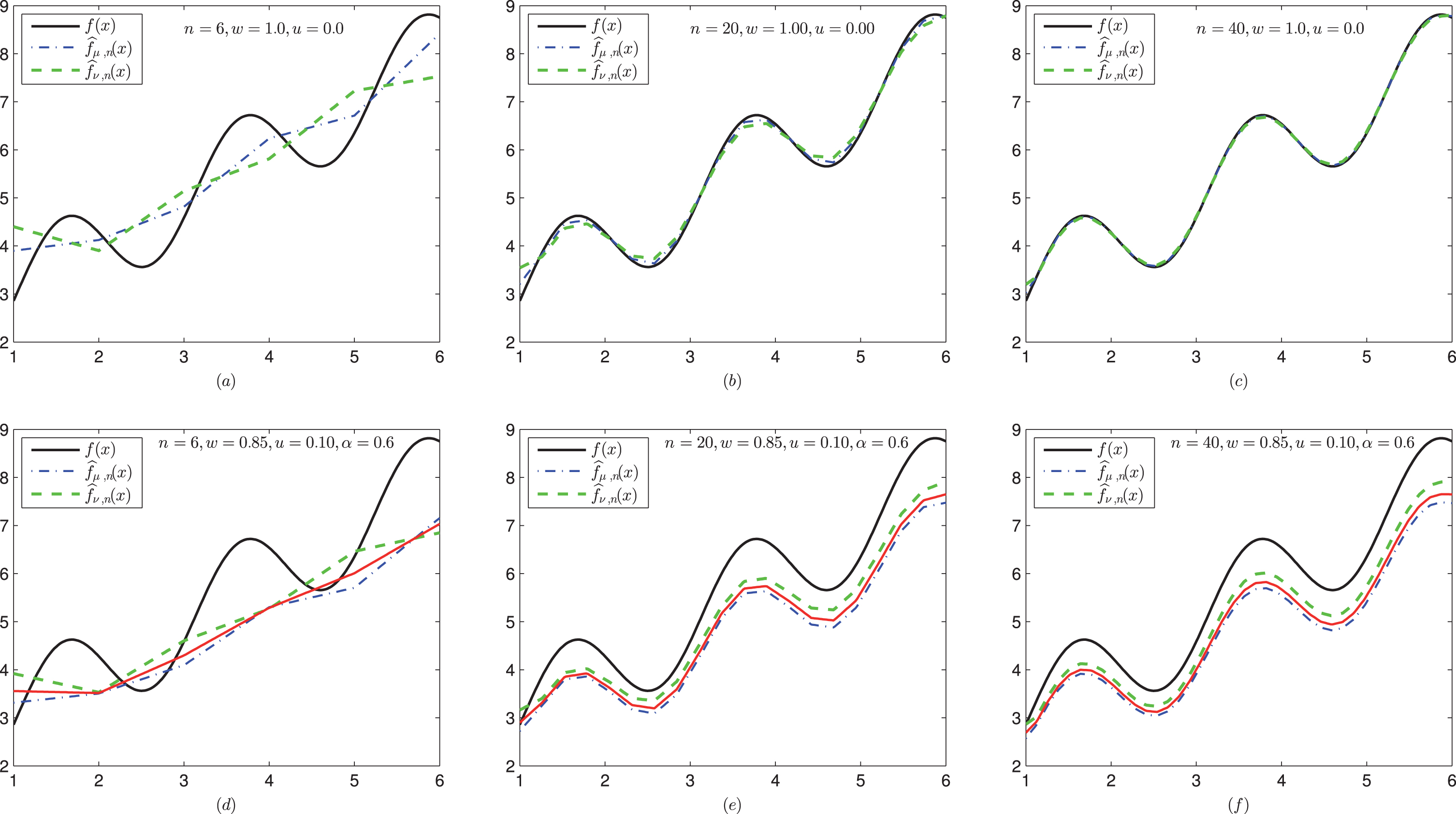
The i-IF-transform with respect to n = 6, 20, 40, respectively and α-hybrid (α = 0.6) i-IF-transform.
Fig. 4 (a) , (b) and (c) show the i-IF-transform
Fig. 5 (a) , (b) and (c) show the special case that w = 1 and u = 0 with respect to n = 6, 20 and 40, respectively.
Fig. 5 (d) , (e) and (f) show that 0.6-hybrid i-IF-transform (red line) when the motive force α = 0.6, w = 0.85 and u = 0.10 with respect to n = 6, 20 and 40, respectively.
When the maximum membership w of TIFN increases, it is notice that i-IF-transform effect is better than the small one. The inverse IF-transform practically coincides with the original function f (x) when n = 40.
The following properties are the fundamentals of the i-IF-transform setting.
On the other hand,
In this paper, to begin with, we introduce a novel definition of IF-Partition. And we discuss some properties of TIF-Partition even including the special case, i.e., of UTIF-Partition. Secondly, we propose the method of IF-transform, which based on the membership and non-membership function related to the UTIF-Partition