In this article, we study some concepts related to q-rung orthopair fuzzy soft sets (q-ROFS sets), together with their algebraic structure. We present operations on q-ROFSSs and their specific properties and elaborate them with real-life examples and tabular representations to develop influx of linguistic variables based on q-rung orthopair fuzzy soft (q-ROFS) information. We present an application of q-ROFS sets to multi-criteria group decision-making (MCGDM) process related to the university choice, accompanied by algorithm and flowchart. We develop q-ROFS TOPSIS method and q-ROFS VIKOR method as extensions of TOPSIS (a technique for ordering preference through the ideal solution) and VIKOR (Vlse Kriterijumska Optimizacija Kompromisno Resenje), respectively. Finally, we tackle a problem of construction business utilizing q-ROFS TOPSIS and q-ROFS VIKOR methods.
Mathematical modeling on real world problems often involve multi-attribute, multi-polar information, uncertainties, hesitancy and vagueness. Fuzzy sets introduced by Zadeh [58], soft set introduced by Molodtsov [29] and rough sets introduced by Pawlak [31] are strong mathematical models for solving many problems in social sciences, engineering, artificial intelligence, computational intelligence, image processing and medical diagnosis. Zadeh [58] initiated the idea of fuzzy sets by means of membership function as an extension of characteristic function associated with traditional crisp set. Atanassov [10] established the idea of intuitionistic fuzzy sets as an extension of fuzzy set by introducing the concepts of membership and non-membership grades along with the restriction that sum of these two grades must not exceed unity. Atanassov [12] portrayed geometrical elucidation of the elements of intuitionistic fuzzy entities. Molodtsov [29] originated the notion of a new kind of sets conventionally known as soft sets, as a mathematical model for sorting out uncertainties by means of parameterizations. Topological structure on these sets have many applications to group decision making problems. Soft topology was introduced by Bashir and Sabir [2], Cagman et al. [13], Hazra et al. [27], Roy and Samanta [50], Shabir and Naz [51], and Varol et al. [53]. Aygunoglu et al. [1] introduced fuzzy soft topological spaces. Riaz and Masooma [37] and Zorlutuna and Atmaca [65] introduced fuzzy parametrized fuzzy soft topology (FPFS-topology). Osmanoglu and Tokat [30] and Li and Cui [28] introduced intuitionistic fuzzy soft topology (IFS-topology). Riaz et al. [41] introduced Hesitant fuzzy soft topology and its applications to multi-attribute group decision-making (MAGDM).
Yager [54–56] introduced Pythagorean fuzzy set as an extension of Atanassov’s intuitionistic fuzzy set and presented Pythagorean membership grades with applications to the multi-criteria decision making (MCDM). Ali [9] presented another view on q-rung orthopair fuzzy sets. Recently, Riaz et al. [45] presented a robust q-rung orthopair fuzzy information aggregation using Einstein operations with application to sustainable energy planning decision management.
Fuzzy sets, Pythagorean fuzzy sets, soft sets, rough sets, neutrosophic sets and their hybrid structures have been studied by many researchers including Akram et al. [3–6], Eraslan and Karaaslan [16], Feng et al. [17, 18], Garg [20, 21], Hashmi et al. [22], Hashmi and Riaz [23], Kumar and Garg [24], Naeem et al. [25, 26], Peng and Yang [32], Peng and Selvachandran [34], Peng and Liu [36], Riaz et al. [38–41], Riaz and Hashmi [42–44], Riaz and Tehrim [46–49], Tehrim and Riaz [52], Zhang and Xu [59], Zhan et al. [60–62], Zhang and Zhan [63], and Zhang et al. [64].
The goal of paper is to introduce q-rung orthopair fuzzy soft sets and q-rung orthopair fuzzy soft topology. The existing intuitionistic fuzzy sets and Pythagorean fuzzy sets fail to handle the uncertain information when the sum of membership degree (μP) and non-membership degree (νP) corresponding to an alternative (ρ) is larger than 1 (μP (ρ) + νP (ρ) >1) as well as the sum of squares of these degrees is larger than 1 (). A q-rung orthopair fuzzy set (q-ROFS) has the ability to deal with such problems. The eminent characteristic of q-ROFS is that the degree of membership (μP) and degree of non-membership (νP) satisfy the condition , so the space of uncertain information they can describe is broader. Moreover, in order to make this model more powerful with addition of parametrization, we propose the idea of q-rung orhtopair fuzzy soft set (q-ROFSS) as a hybrid model of q-rung orthopair fuzzy set and soft set. A q-ROFSS and q-ROFS topology provide a large number of applications to the multi-criteria group decision making (MCGDM) in a comprehensive way.
Rest of the paper is organized as follows. In Section 2, some rudiments of fuzzy set, soft set, IFS, PFS and q-ROFS are given. In Section 3, the concept of q-rung orthopair fuzzy soft set (q-ROFSS) is introduced. In Section 4, the construction of q-rung orthopair fuzzy topology is expressed. Meanwhile, many topological properties and their illustrative examples are presented. Separation axioms, regular space and normal space in the context of q-rung orthopair fuzzy topology are defined. In Section 5, q-ROFSS based choice value method for MCGDM is developed. An application of the proposed method for the optimum results in school education systems is presented. In Section 6, a robust extension of TOPSIS approach with q-ROFS topology is elaborated for money investment. Finally, in Section 7, the conclusion of this research work is summarized.
Preliminaries
In this section, we briefly review some basic concepts including fuzzy set, soft set, intuitionistic fuzzy set, Pythagorean fuzzy set and q-rung orthopair fuzzy sets that are very helpful in analysis of rest of the paper.
Definition 2.1. [58] Let X be a crisp set and μA : X → [0, 1] be the membership function. Then the fuzzy set is an object of the form,
the value μA (ρ) denotes the membership degree of ρ to the fuzzy set A.
Definition 2.2. [10, 11] An intuitionistic fuzzy set (IFS) over the universe X is an object of the form,
where the mappings and map elements of X to the unit closed interval [0, 1] with the restriction that . The values and denote the membership degree and non-membership degree, respectively.
Definition 2.3. [29] Let X to be a crisp set and E be the set of attributes or parameters. Let A ⊆ E, then the soft can be defined as
where ψ : A → P (X) be the set-valued mapping. The pair (ψ, A) can be shortly written ψA.
Definition 2.4. [54–56] A Pythagorean Fuzzy Set (PFS) is an object of the form,
where μP and νP are mappings from X to the unit closed interval [0, 1] with the restriction that . The pair (μp (ρ) , νp (ρ) ) is known as Pythagorean Fuzzy Number (PFN).
Yager [57] introduced the idea of q-rung orthopair fuzzy set (q-ROFS) as an extension of both IFS and PFS.
Definition 2.5. [57] Let X be the universal set, a q-rung orthopair fuzzy set (q-ROF set) is defined as,
where μR (ϱ) ∈ [0, 1] and νR (ϱ) ∈ [0, 1] represent the degree of membership and degree of non membership of ϱ ∈ R that fulfil the requirement
for ϱ ∈ R and q > 2. In general,
is known as the degree of hesitancy for ϱ to R.
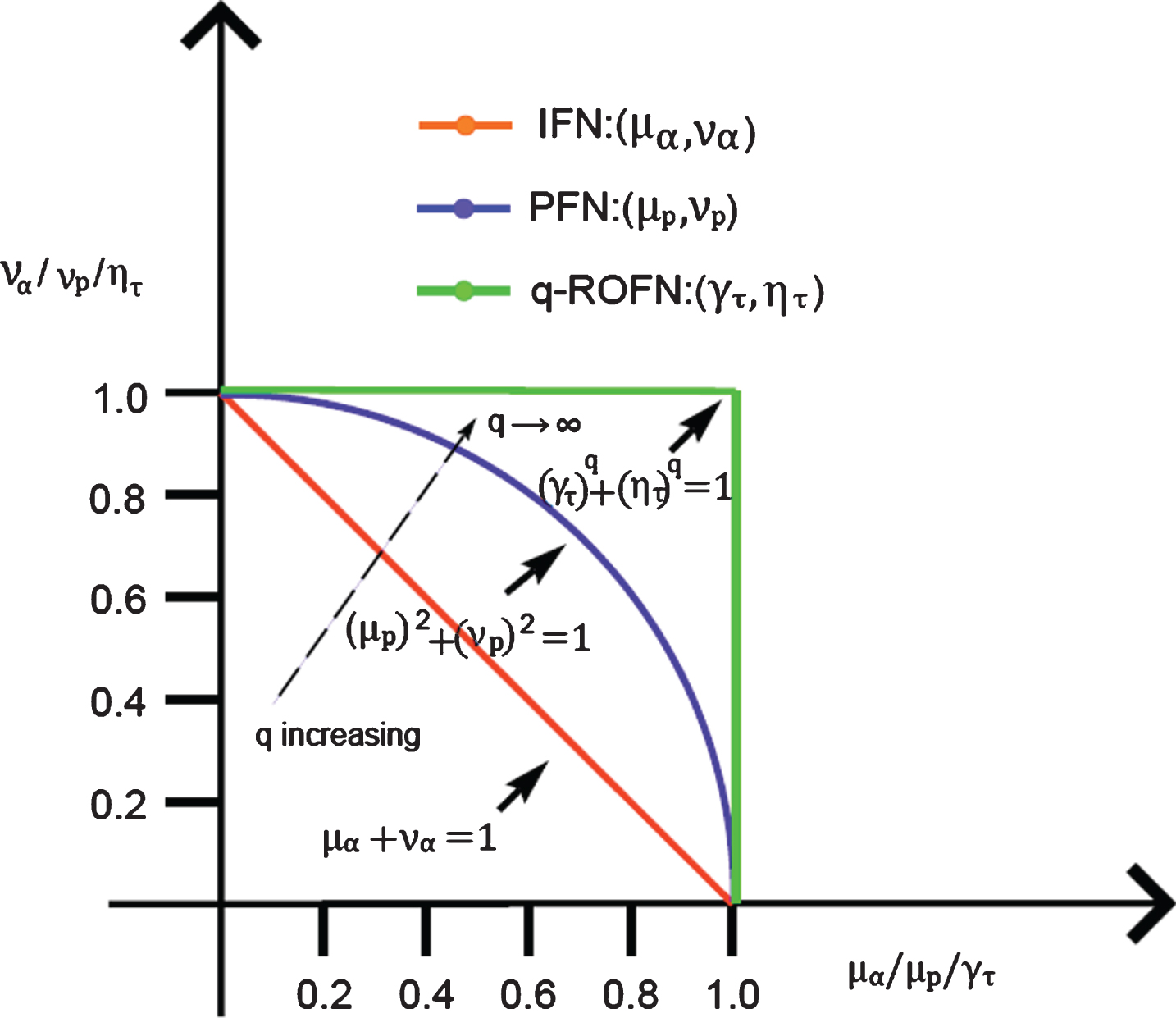
To make it more simple ℵ = (μℵ, νℵ), with 0 ≤ μℵ (ϱ) q + μℵ (ϱ) q ≤ 1, ϱ ∈ R, q > 2, is said to be a q-rung orthopair fuzzy number (q-ROFN). A q-ROFN can be regarded as different kinds of fuzzy numbers with the help of different values of q. When q = 1 it becomes intuitionistic fuzzy number (IFN) and when q = 2 it becomes Pythagorean fuzzy number (PFN). We observe that IFNs and PFNs are special cases of q-ROFNs. The space for IFN, PFN, q-ROFN is shown in Fig. 1.
Space for IFN (μα, να), PFN (μp, νp) & q-ROFN (μτ, ντ). The green line in this figure may be considered as dotted line.
q-Rung orthopair fuzzy soft sets
In this section, we introduce the novel concept of q-rung orthopair fuzzy soft set (q-ROFSS) as a hybrid model of q-rung orthopair fuzzy set and soft set. We introduce some elementary operations on q-rung orthopair fuzzy soft sets and their related results.
Definition 3.1. Let X be the universal set and E be the set of attributes. Assume further that A ⊆ E and qROFX represents the class of all q-rung orthopair fuzzy subsets over X and κ : A → qROFX be a mapping. A q-rung orthopair fuzzy soft set (q-ROFSS) on X is represented by (κ, A) or κA and defined by
-9.7ptwhere μκA : X → [0, 1] and νκA : X → [0, 1] describe maps called membership map and non-membership map, respectively. Specifically, μκA (ϱ) denotes the grade of membership and νκA (ϱ) represents grade of non-membership of the alternative ϱ ∈ X to the set (κ, A) having the quality that sum of the qth power of these grades must not exceed unity.
For each parameter e, the value κ (e) expresses κ (e)-approximate point.
Tabular array of q-ROFSS κA
κA
e1
e2
⋯
en
ρ1
(μ11, ν11)
(μ12, ν12)
⋯
(μ1n, ν1n)
ρ2
(μ21, ν21)
(μ22, ν22)
⋯
(μ2n, ν2n)
⋮
⋮
⋮
⋱
⋮
ρm
(μm1, νm1)
(μm2, νm2)
⋯
(μmn, νmn)
The multitude of every q-ROFSS over X taken from E is known as q-ROFS class and is denoted as q - ROFS (X, E).
Let us take μij = μκA (ej) (ϱi) and νij = νκA (ej) (ϱi) where i and j run, respectively, from 1 to m and from 1 to n. Thus the q-ROFSS κA may be written in tabular form as cited in Table 1:
The corresponding matrix form is
The matrix shown above is known as q-rung orthopair fuzzy soft matrix or simply q-ROFS matrix.
Definition 3.2. We consider and be q-rung orthopair fuzzy soft sets (q-ROFSSs) on X. We say that is q-ROFS subset of i.e. , if
A1 ⊆ A2, and
κ(1) (e) is q-ROFS subset of κ(2) (e) for all e ∈ A1.
It’s more important that may not require that each element of must be in , as we must have in classical set theory.
Definition 3.3. We consider (κ1, A1) and (κ2, A2) be q-ROFSSs over X. Then the union of these sets may be discussed as where A = A1 ∪ A2 and for all e ∈ A,
where κ1 (e) ∪ κ2 (e) is the union of two q-ROFSSs.
Definition 3.4. The intersection of two q-ROFSSs (κ1, A1) and (κ2, A2) is also a q-ROFSS , where A = A1 ∩ A2 ≠ φ and κ (e) = κ1 (e) ∩ κ2 (e) for all e ∈ A.
Definition 3.5. The difference (κ, A) of two q-ROFSSs (κ1, A1) and (κ2, A2) over X is defined by (κ, e) = (κ1, e) \ (κ2, e) ; ∀ e ∈ E and is discussed as . Hence,
Definition 3.6. The complement of a q-ROFSS (κ, A) is a map κc : A → q - ROFSX given by κc (e) = [κ (e)] c, for all e ∈ A. We can defined it as (κ, A) c or it may also by (κc, A). Thus, if
thus
for every e ∈ A.
4) The difference of (κ1, A1) and (κ2, A2) is 0.96 } , {ζ6, 0.34, 0.49 }) , (e3, {ζ2, 0.61, 0.82 } , {ζ6, 0.71, 0.55})}
We can easily digest these notions with the help of q-ROFS matrices as given below:
Definition 3.8. A q-ROFSS (κ, E) upon X is known as null q-ROFSS, written as κφ or Φ, if ∀ e ∈ E we have , where express null q-rung orthopair fuzzy set. So,
Definition 3.9. A q-ROFSS (κ, E) upon X is known as absolute q-ROFSS, represented by , if . Here denotes absolute q-rung orthopair fuzzy soft set. Thus,
Definition 3.10. A q-rung orthopair fuzzy soft set q-ROFSS (κ, A) is called q-rung orthopair fuzzy soft point (q-ROFS-point), expressed as ϑκ, if for the element ϑ ∈ A we have
κ (ϑ) ≠ κφ, and
κ (ϑ′) = κφ, for all ϑ′ ∈ A - {ϑ}.
Definition 3.11. A q-ROFS point ϑκ is said to be in q-ROFSS (κ1, A) i.e. if ϑ ∈ A ⇒ κ (ϑ) ⊆ κ1 (ϑ).
Example 3.12. Let X = {c, m, t} and A = {ϑ1, ϑ2}, then
and
are two distinct q-ROFS points contained in the following q-ROFSS
It is to be noted that . i.e. a q-rung orthopair fuzzy soft set (q-FOFSS) is union of its q-rung orthopair fuzzy soft (q-ROFS) points.
It is worth mentioning that any q-ROFS point (assume) is said to be a singleton subset of q-ROFSS κA as it has a parameter and its κ-approximate element.
q-rung orthopair fuzzy soft topology
In this section, the notion of q-rung orthopair fuzzy soft topology (q-ROFS topology) based on on q-ROFSSs is defined. Certain properties of q-ROFS topology are expressed and their related results are well proved.
Definition 4.1. Let q - ROFS (X, E) be a set of all the q-ROFS subsets of the absolute q-ROFSS . For A, B ⊆ E, a sub collection of q - ROFS (X, E) is called q-rung orthopair fuzzy soft topology (q-ROFS topology) on if it satisfy these axioms:
,
then ,
If , then .
The doublet or 2-tuples or simply is called q-ROFS topological space. The members of are known as q-ROFS open sets and their complements are known as q-ROFS closed sets.
Definition 4.2. Assume that is a q-ROFS topology. For some Y ⊆ X equipped with E as set of parameters, is a q-ROFS topology on Y whose q-ROFS open sets are , where κA are q-ROFS open sets of , κB are q-ROFS open sets of and is absolute q-ROFSS on Y. Then is taken as the q-ROFS subspace of . It can be written as
Example 4.3. Let
be the universe and E = {ei : i = 1, 2, ⋯ , 4} be the collection of decision variables. Take two sub collections A = {e1, e2} and B = {e1, e2, e3} of E. Assume that
Then,
is a q-ROFS topology on X.
Now, absolute q-ROFSS on Y = {ϱ2, ϱ3} ⊆ X is
Since
so
is a q-ROFS sub-topology of .
Definition 4.4. Let be a q-ROFS topological space and .
The interior of κA is q-ROFS union of all q-ROFS open subsets of κA. Then is the greatest q-ROFS open subset of κA.
The closure of κA is the q-ROFS intersection of all q-ROFS closed supersets of κA. Further, is the smallest q-ROFS closed superset of κA.
The boundary or frontierFr (κA) of κA is defined as
The exteriorExt (κA) of κA is defined as
These notions can be discussed with the help of this example.
Example 4.5. Consider X = {ϱ1, ϱ2} a universe set with A = {e1, e2} ∈ E is the gathering of characteristics. If
then the collection of q-ROFS subsets of is a q-ROFS topology. The elements of are now q-ROFS open sets. Its related closed q-ROFSS s are
Let’s take the q-ROFSS
such that
The q-ROFS interior of κA is
The q-ROFS closure of κA is
Now,
Hence q-ROFS frontier of κA is
Finally, the q-ROFS exterior of κA is
Theorem 4.6.Let be a q-ROFS top. space and , then
, and
.
Theorem 4.7.Let be a q-ROFS top. space and , then .
Proof. By using the definition,
□
Definition 4.8. We are taking X a crisp set having E as the gathering of attributes then q - ROFS (X, E) and are termed as discrete and indiscrete q-ROFS topologies conformably. Concentrate that is the biggest whereas is the smallest q-ROFS topology on .
Remark. The intersection of two q-ROFS topology is always a q-ROFS topology but their union may not be q-ROFS topology. The following example illustrate this idea.
Example 4.9. Let X = {ϱ1, ϱ2} be the universal set and E = {ei : i = 1 . . . .4} be the assembly of characteristics. Let A = {e1, e2} , B = {e3, e4} ⊆ E in correspondence to q-ROFSSs
then
and
are q-ROFS topologies on X but
is not q-ROFS topology.
Definition 4.10. If we consider and be q-ROFS topological spaces and then is known as weaker or coarser than and is said to as stronger or finer than . In both cases and are said to be comparable.
Example 4.11. We consider X = {ϱ1, ϱ2} the universal set and E = {e1, e2, e3} be the set of attributes with A = {e1, e2} ⊂ E. Consider q-ROFSS s
It is clear now that and are two q-ROFS topologies. Since so is weaker than .
Remark. It is evident that"law of excluded middle" and "law of contradiction" existing in crisp set theory are not applicable in IFSSs and PFSSs. This property may be verified in q-ROFSS theory due to this few results in q-ROFS topology differ from classical topology. Here is some evidence in the favor of our wording.
Example 4.12. Let X = {ϱ1, ϱ2, ϱ3} be a universal set and E = {ei : i = 1, 2, 3, 4} be a class of characteristics with A = {e1, e2} ⊆ E. Now consider
Obviously
does not form a q-ROFS topology on X as neither nor .
Definition 4.13. Let be a q-ROFS topological space. Then is a -basis for if for each , there exists such that .
Example 4.14. We consider X = {ϱ1, ϱ2} the universal set and E = {e1, e2} be characteristics’ set with A ⊆ E, by taking q-ROFSS s
This set
provide a q-ROFS basis for the q-ROFS topology .
Theorem 4.15.If β is a q-ROFS basis for then, for each e ∈ E, βe = {κ (e) : κE ∈ β} serves as a q-ROFS basis for the q-ROFS topology .
Proof. Let κ(1) (e) ∈ τ (e) for some . Since β is a q-ROFS basis for so,by def. there is β′ ∈ β such that and hence , where . □
Theorem 4.16.Let be a q-ROFS topological space. A collectionis a q-ROFS basis for if and only if for any q-ROFSS κU and any q-ROFS point ςκ ∈ κU, there is a κBα ∈ β such that .
Proof. Let β be a q-ROFS basis for . Now for every q-ROFS open set κU of , there are q-ROFS sets κBγ, such that . Therefor, for any , we have a Bγ such that
On the other hand, we consider that for every q-ROFS open set κU and ςκ ∈ κU, we have κB in β such that . Then
so that
which is union of q-ROFSSs in β. □
q-ROFS separation axioms
Definition 4.17. A q-ROFS topological space is said to be a q-ROFS T0-space if for each pair of different q-ROFS points there is an q-ROFS open set κA which contain only one of the q-ROFS points.
Example 4.18. Each discrete q-ROFS topological space is a q-ROFS T0-space because there is an open set which have but not .
Remark. The property of being a q-ROFS T0-space is a q-ROFS topological property i.e. every subspace of a q-ROFS T0-space is q-ROFS T0-space.
Definition 4.19. A q-ROFS topological space is said to be a q-ROFS T1-space if for any two q-ROFS points of , there exists two q-ROFS open sets κC and κD such that , and , .
Example 4.20. Each discrete q-ROFS topological space is a q-ROFS T1-space. If and are 2 different q-ROFS points in , then we have q-ROFS open sets and such that whereas .
Theorem 4.21.The following statements for a q-ROFS topological space are equivalent.
is a q-ROFS T1-space.
Each q-ROFS singleton subset of is q-ROFS closed.
Proof. its very simple to do. □
Remark. The property of being a q-ROFS T1-space is a q-ROFS topological property i.e. every subspace of a q-ROFS T1-space is q-ROFS T1-space.
Definition 4.22. A q-ROFS space is is said to be q-ROFS T2-space or q-ROFS Hausdorff space if for any two different q-ROFS points and of , there exist two q-ROFS open sets κC and κD s.t. , and .
Example 4.23. We take a discrete q-ROFS topological space . If and be two different q-ROFS points in , so obviously and are disjoint q-ROFS open sets, s. t. and . Hence is a q-ROFS T2-space.
Theorem 4.24.A q-ROFS topological space is a q-ROFS T2-space iff for two different q-ROFS points and , there we have q-ROFS closed sets κC1 and κC2 s. t. , , , and .
Proof. We consider that be a q-ROFS T2-space and also and be two different q-ROFS points of . Now, with the help of definition, there will exist two q-ROFS open sets κU1 and κU2 such that , , , and . But then, and , . , .
On the other hand, we consider that for any two different q-ROFS points , we have q-ROFS closed sets κC1 and κC2 s. t. , , , and . So {κC1} c and {κC2} c are q-ROFS open sets such that , , , and . Thus, is a q-ROFS T2-space. □
Remark. A q-ROFS T2-space satisfies the hereditary property i.e. every subspace of a q-ROFS T2-space is q-ROFS T2-space.
Definition 4.25. A q-ROFS topological space is said to be a q-ROFS regular space if for any q-ROFS closed set κA and any q-ROFS point ςκ ∉ κA, ∃ q-ROFS open sets κC and κD such that and , where φE is the null q-rung orthopair fuzzy soft set.
Definition 4.26. A q-ROFS topological space is said to be a q-ROFS T3-space if it is both q-ROFS regular and q-ROFS T1-space.
Definition 4.27. A q-ROFS topological space is known as a q-ROFS normal space if there are two q-ROFS closed disjoint subsets κA and κB of , ∃ two q-ROFS open sets κC and κD such that , and . A q-ROFS normal T1-space is said to be a q-ROFS T4-space.
Theorem 4.28.Each q-ROFS T4-space is q-ROFS regular, that is every q-ROFS normal T1-space is q-ROFS regular.
Proof. We consider that be a q-ROFS T4-topological space. We say that ςκ be a q-ROFS point in . Now using Theorem 4.21 {ςκ} is a closed q-ROFSS in . We suppose that κA is a closed q-ROFSS does not contain ςκ. As is q-ROFS normal, so we have an open q-ROFSS namely κU, κV s.t.
so that
Hence is a q-ROFS regular. □
MCGDM with choice value method under q-rung orthopair fuzzy soft sets
This section gives multi-criteria group decision making (MCGDM) to rank the alternative from high preference to low preference. In MCGDM the alternatives are evaluated by a group of decision makers (DMs) in the presence of multiple criterion to choose the best alternative from a set of feasible alternatives under a particular situation. Although there exist numerous aggregation methods, in the current context we propose weighted choice values method under q-ROFSSs in order to calculate the final decision because they are a keystone in well-established mechanisms from the soft sets and fuzzy sets literature. Meanwhile, we now develop respective algorithm for problems that are characterized by q-rung orthopair fuzzy soft sets.
Algorithm 1. Choice Value MethodStep 1: Input X = {ϱi : i = 1, 2, ⋯ , n} as a set of objects and E = {ei : i = 1, 2, ⋯ , k} as a set of attributes. Then compute the q-rung orthopair fuzzy soft sets.
Step 2: Compute the corresponding q-ROFS matrix.
Step 3: Assign weights to each attribute.
Step 4: Compute the matrix of choice values using .
Step 5: Compute the score value for each ϱi by using score function S = μq - νq.
Step 6: The ϱi for which s (ϱi) is maximum is the desired alternative.
Step 7: In case of a tie, compute the values of accuracy function a (ϱi).
Step 8: The ϱi for which a (ϱi) is maximum is the requisite choice.
Selection of school education system
The selection of the best school education system for children in a newly established housing society is always a difficult task. Since each individuals has different priorities when searching for a school. The teaching staff of the school is something that is very important to gain quality education. There are a number of factors to take into consideration for selecting the best school education system, whether we are looking for a great building, learning environment and communication skills, effective teaching methods, economical fee structure and carrier counseling.
Example 5.1. Let X = {ϱi : i = 1, 2, ⋯ , 6} be the set of well known school education systems existing in the city. In order to get the best school education system in the society, the board of housing society consider E = {ei : i = 1, 2, ⋯ , 7} as set of attributes, where
By viewing the track record of the education school systems in the city, the board of housing society prepares q-rung orthopair fuzzy soft information as given in Table 2.
q-ROFSS information
κE
e1
e2
e3
e4
e5
e6
e7
ϱ1
(0.73,0.26)
(0.80,0.34)
(0.83,0.22)
(0.65,0.11)
(0.82,0.30)
(0.82,0.34)
(0.78,0.28)
ϱ2
(0.70,0.30)
(0.73,0.47)
(0.77,0.31)
(0.61,0.28)
(0.75,0.37)
(0.64,0.45)
(0.71,0.33)
ϱ3
(0.65,0.38)
(0.59,0.54)
(0,65,0.40)
(0.59,0.33)
(0.67,0.44)
(0.61,0.59)
(0.67,0.44)
ϱ4
(0.61,0.46)
(0.48,0.60)
(0.60,0.43)
(0.49,0.41)
(0.60,0.55)
(0.59,0.62)
(0.62,0.55)
ϱ5
(0.54,0.58)
(0.39,0.67)
(0.53,0.58)
(0.45,0.56)
(0.58,0.66)
(0.50,0.68)
(0.60,0.59)
ϱ6
(0.46,0.61)
(0.33,0.71)
(0.22,0.69)
(0.38,0.74)
(0.52,0.72)
(0.46,0.75)
(0.53,0.71)
The corresponding q-ROFS matrix is
Next, the weights are assigned to each parameter as follows.
The sum of the weights is ΣW (ei) =4.16. Then the weight vector is given by,
Thus, the q-ROFS matrix for choice values is
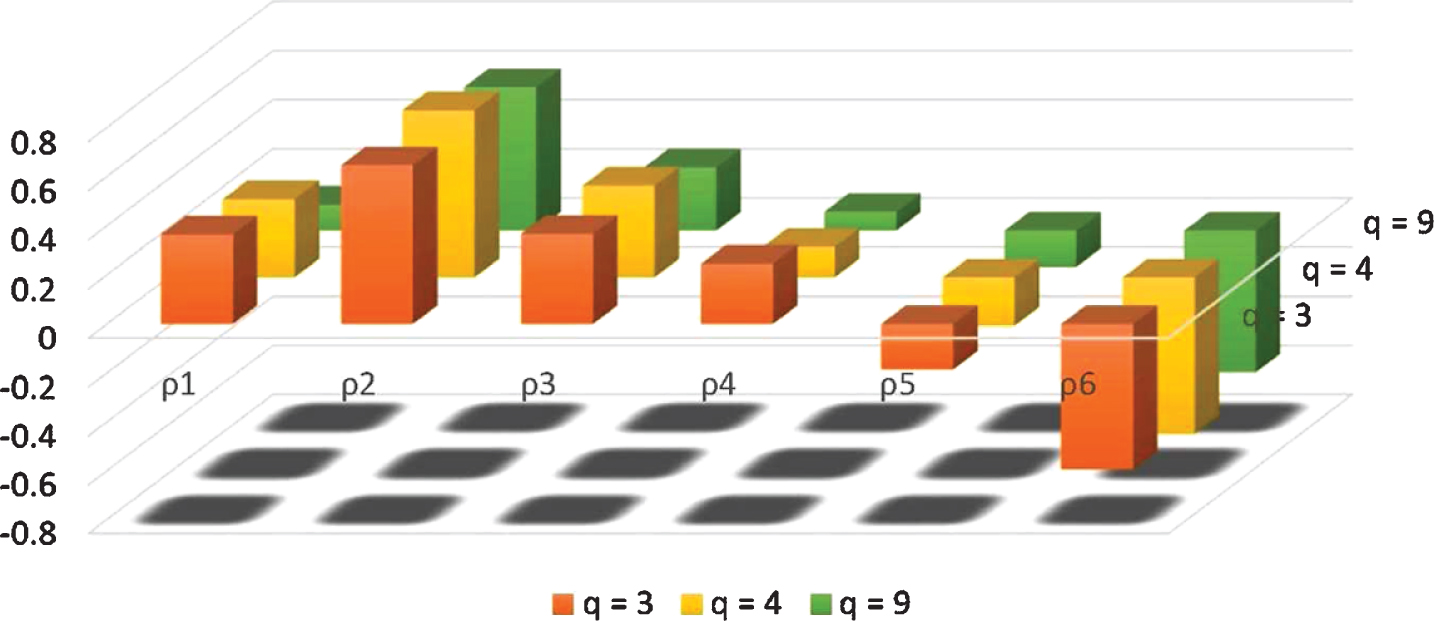
The score values with q = 3, q = 4 and q = 9 are demonstrated in Table 3.
Table 3 demonstrates the final ranking as follows
From the final ranking it is clear that the first preference is ϱ2. The rankings of schools for different values of q chosen is depicted in the Fig. 2.
Ranking of alternatives for different values of q.
Score values for alternatives with q = 3, q = 4 and q = 9
X
S = μ3 - ν3
S = μ4 - ν4
S = μ9 - ν9
Ranking
ϱ1
0.3643
0.3177
0.1062
3
ϱ2
0.6456
0.6798
0.5846
1
ϱ3
0.3663
0.3732
0.2574
2
ϱ4
0.2458
0.1238
0.0773
4
ϱ5
-0.1845
-0.1967
-0.1474
5
ϱ6
-0.5939
-0.6381
-0.5766
6
The proposed Algorithm 1 is used in the environment of q-ROFS information for the selection of school education systems and the results are compared as indicated in the Table 6 listing the results of final ranking of seven alternatives.
Comparison analysis of final ranking with existing methods using Algorithm 1
q-ROFS topology is a new approach towards uncertainty in this approach a set of objects, a set of attributes and a team of decision makers (DMs) are considered. The opinion of each DM is expressed by a q-ROFS open set. Additionally, to find the unanimous decision, the q-ROFS topology is constructed with the help of these q-ROFS open sets which describe the opinion of DMs. This is a robust MCGDM approach in addition to other existing MCGDM approaches. The linguistic terms for deciding alternatives are given in Table 5.
Linguistic terms for deciding alternatives
Linguistic terms
Fuzzy weights
Highly valuable (HV)
0.90
Much valuable (MV)
0.75
Valuable (V)
0.55
Less valuable (LV)
0.30
Least valuable (LtV)
0.15
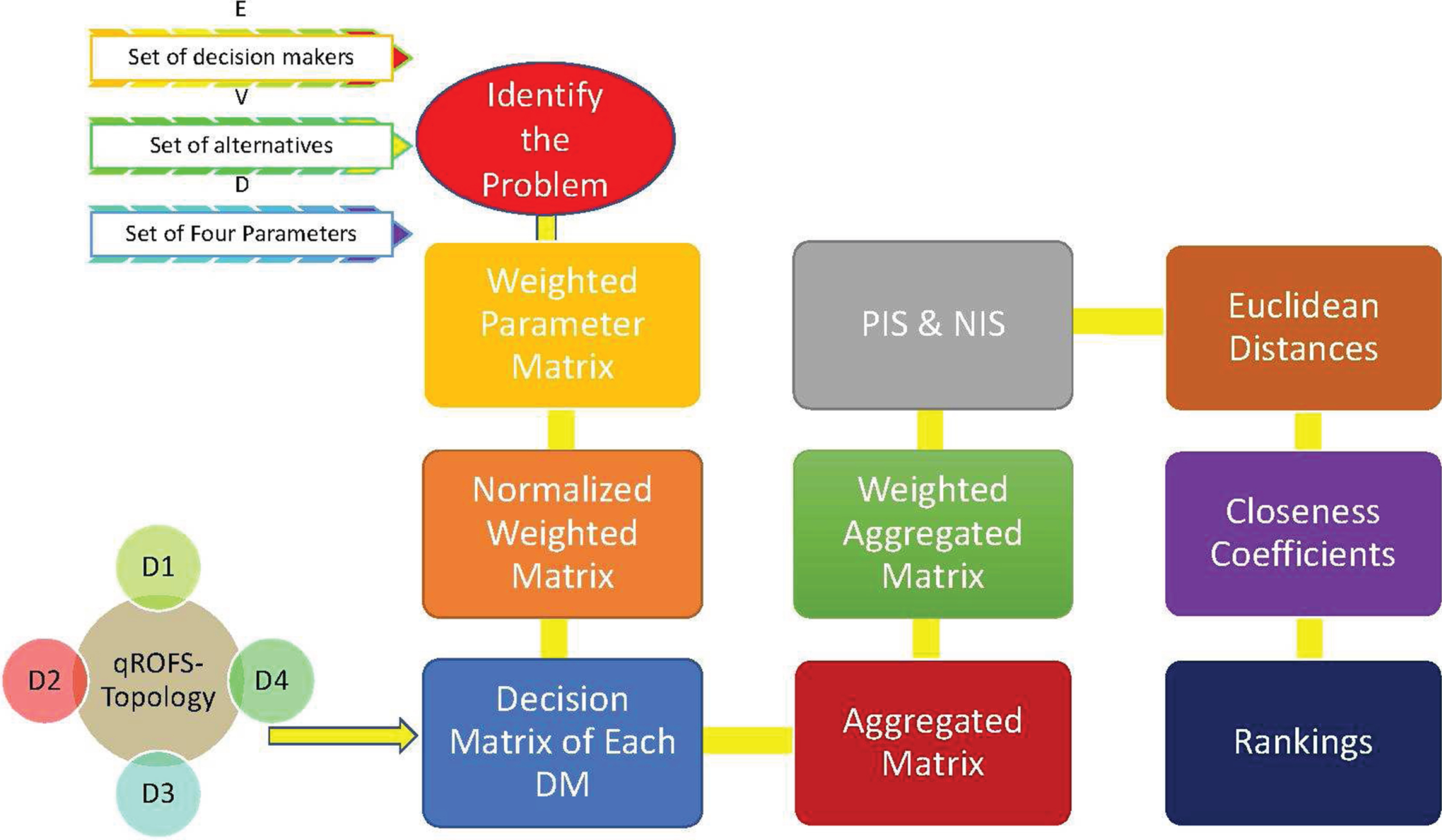
Algorithm 2. Extension of TOPSIS to q-ROFS Topology
Step 1: Identifying the problem. Assume that is the set of decision makers, is the objects and P = {pi : i ∈ NI} is the set of parameters/criterion.
Step 2: By selecting the linguistic terms from Table 5, constructing weighted parameter matrix as
where wij is the weight assigned by the expert to the alternative by considering linguistic variables as given (for example) in Table 5.
Step 3: Construct normalized weighted matrix
where and obtaining the weighted vector , where and . Notice that represents sum of weights of ith row in the matrix cited at step 2 above.
Step 4: Construct q-ROFS decision matrix
where is a q-ROFS element, for ith decision maker so that Di makes q-ROFS topolgy for each i. Then obtain the aggregating matrix
Step 5: Obtain the weighted q-ROFS decision matrix
where .
Step 6: In general, two sorts of criteria are thought of in daily life decision making which are named benefit (D1) and the cost (D2). In order to obtain q-ROFS valued positive ideal solution (q-ROFSV-PIS) and q-ROFS valued negative ideal solution (q-ROFSV-NIS), we employ in order
and
-3ptwhere ∨ stands for q-ROFS union and ∧ represents q-ROFS intersection.
Step 7: Compute q-ROFS Euclidean distances of each alternative from q-ROFSV-PIS and q-ROFSV-NIS, respectively, utilizing
Step 8: The closeness coefficient of each alternative with ideal solution by making use of /.
Step 9: Rank the alternatives in decreasing (or increasing) order to get the preference order of the alternatives.
The picture of procedural steps of Algorithm 2 is shown in Fig. 3.
The picture of Algorithm 2.
Numerical example
Assume that a firm plans to invest some money in stock exchange by purchasing some shares from anyone of four best companies. We compute the ranking methodology by using TOPSIS method based on q-ROFS topology.
Step 1: Let be the set four companies for money investment, P = {pi : i = 1, 2, 3, 4}, be the set of parameters/attributes. Let D = {Di : i = 1, 2, 3, 4} be the set of decision makers.
Step 2: Choose linguistic terms from Table 5, construct weighted parameter matrix
where wij is the weight adjusted by the board of governors of the society. Di (row-wise) to each parameter pj (column-wise).
Step 3: The normalized weighted matrix is
and hence the weighted vector is .
Step 4: The q-ROFS decision matrix Di of each member is placed, in which alternatives are expressed row-wise and parameters are expressed column-wise such that the aggregate of all Di’s makes a q-ROFS topology. We consider the following matrices
Hence, the aggregated decision matrix comes out to be
Step 5: The weighted q-ROFS decision matrix
where .
Step 6: Here, we have to calculate q-ROFS valued positive ideal solution (q-ROFSV-PIS) and q-ROFS valued negative ideal solution (q-ROFSV-NIS). As our benefit is with the good selection of an institution which provides better education at reasonable price.
and
Step 7: The q-ROFS Euclidean distances of each alternative from q-ROFSV-PIS and q-ROFSV-NIS, respectively, are computed as
and
Step 8: The closeness coefficient of each alternative with ideal solution is computed as
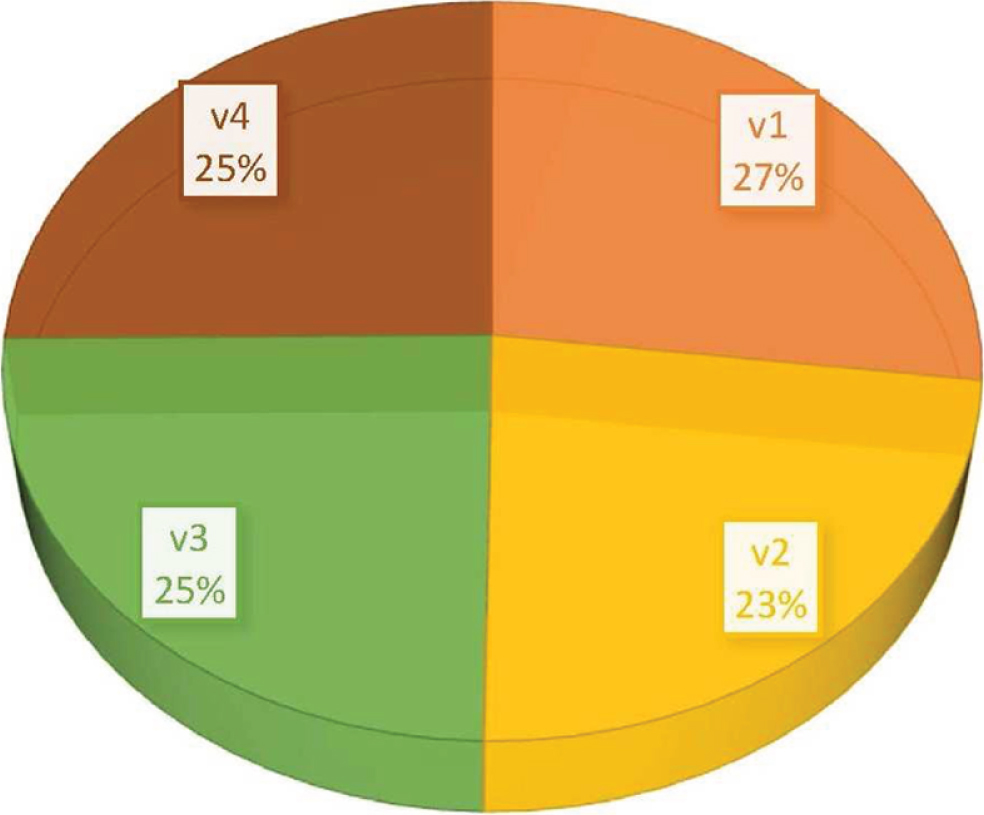
Step 9: The preference order of the alternatives, therefore, is given by
The final ranking is portrayed in Fig. 4.
3D Pie chart of ranking.
Comparison analysis of final ranking with existing methods using Algorithm 2
As we see that, rank of is maximum, so the optimal alternative is . The remaining alternative are also very close to the optimal alternative. The best possible ranking of feasible alternatives is computed by proposed MCGDM method. The proposed Algorithm 2 is used in the environment of q-ROFS topology based TOPSIS for the ranking of alternatives and the results are compared with some existing decision making methods as indicated in the Table 6 listing the optimal alternative.
Conclusion
Multi-criteria group decision making (MCGDM) has been intensively studied by numerous researchers. The techniques developed for this task mainly depend on the type of decision problem under consideration. Most of the real-life situations are uncertain, imperfect, imprecise and vague. The existing models of fuzzy sets, intuitionistic fuzzy sets, Pythagorean fuzzy sets, q-rung orthopair fuzzy sets are very helpful in solving real world problems under uncertainty. Nevertheless, all these notions have some limitations imposed on the membership and non-membership grades. In this paper, the concept of q-rung orthopair fuzzy soft set (q-ROFSS) as a hybrid model of q-rung orthopair fuzzy set and soft set is introduced. Some elementary operations on q-rung orthopair fuzzy soft sets and their key properties are defined. The idea of q-rung orthopair fuzzy soft topology (q-ROFS topology) on q-rung orthopair fuzzy soft set (q-ROFSS) is presented. Certain topological properties like basis, subspace, interior, closure and boundary of a q-ROFSS are given. Separation axioms, regular spaces and normal spaces in the context of q-ROFS topology are studied. Additionally, the choice value method based on q-ROFSs and extension of TOPSIS (Technique for Order Preference by Similarity to Ideal Solution) to q-ROFS topology for multi-criteria group decision making (MCGDM) are developed. An application of q-ROFS information to the MCGDM by using choice value method for the optimum results in school education systems is given. The ranking of companies for money investment is presented by using TOPSIS method with q-ROFS topology. The comparison analysis of proposed approaches with some existing MCGDM approaches are given to illustrate the feasibility and validity of the proposed approaches.
Footnotes
Acknowledgment
The authors are highly thankful to the Editor-in-chief and the referees for their valuable comments and suggestions for improving the quality of our paper.
References
1.
AygunogluA., CetkinV. and AygunH., An introduction to fuzzy soft topological spaces, Hacettepe Journal of Mathematics and Statistics43(2) (2014), 193–204.
2.
AhmadB. and HussainS., On some structures of soft topology, Mathematical Sciences6(64) (2012), 1–7.
3.
AkramM. and AliG., Hybrid models for decision.making based on rough Pythagorean fuzzy bipolar soft infor-mation, Granular Computing5(1) (2020), 1–15.
4.
AkramM. and ArshadM., A Novel Trapezoidal Bipolar Fuzzy TOPSIS Method for Group Decision-Making, Group Decision and Negotiation28(3) (2019), 565–584.
5.
AkramM. and AdeelA., Novel TOPSIS method for group decision-making based on hesitant m-polar fuzzy model, Journal of Intelligent & Fuzzy Systems37(6) (2019), 8077–8096.
6.
AkramM. and HabibA., q-rung picture fuzzy graphs: a creative view on regularity with applications, Journal of Applied Mathematics and Computing61(1-2) (2019), 235–280.
7.
AliM.I., FengF., LiuX.Y., MinW.K. and ShabirM., On some new operations in soft set theory, Computers and Mathematics with Applications57 (2009), 1547–1553.
8.
AliM.I., A note on soft sets, rough soft sets and fuzzy soft sets, Applied Soft Computing11 (2011), 3329–3332.
9.
AliM.I., Another view on q-rung orthopair fuzzy sets, International Journal of Intelligent Systems33 (2018), 2139–2153.
10.
AtanassovK., Intuitionistic fuzzy sets, in: V. Sgurev, Ed., VII ITKRs Session, Sofia, June 1983 (Central Sci. and Techn. Library, Bulg. Academy of Sciences, 1984).
11.
AtanassovK.T., Intuitionistic fuzzy sets, Fuzzy Sets and Systems20 (1986), 87–96.
12.
AtanassovK.T., Geometrical Interpretation of the elements of yhe intuitionistic fuzzy objects, International Journal of Bioautomation20(S1) (2016), S27–S42.
13.
ÇağmanN., KarataşS. and EnginogluS., Soft topology, Computers and Mathematics with Applications62 (2011), 351–358.
14.
ÇağmanN., EnginogluS. and ÇitakF., Fuzzy soft set theory and its applications, Iranian Journal of Fuzzy Systems8(8) (2011), 137–147.
15.
ÇağmanN., ÇitakF. and EnginogluS., FP-soft set theory and its applications, Annals of Fuzzy Mathematics and Informatics2(2) (2011), 219–226.
16.
EraslanS. and KaraaslanF., A group decision making method based on TOPSIS under fuzzy soft environment, Journal of New Theory3 (2015), 30–40.
17.
FengF., JunY.B., LiuX. and LiL., An adjustable approach to fuzzy soft set based decision making, Journal of Computational and Applied Mathematics234(1) (2010), 10–20.
18.
FengF., LiC., DavvazB. and AliM.I., Soft sets combined with fuzzy sets and rough sets, a tentative approach, Soft Computing14(9) (2010), 899–911.
19.
GuleriaA. and BajajR.K., On Pythagorean fuzzy soft matrices, operations and their applications in decision making and medical diagnosis, Soft Computing (2018), doi.org/10.1007/s00500-018-3419-z
20.
GargH., A new generalized Pythagorean fuzzy information aggregation using Einstein operations and its application to decision making, International Journal of Intelligent Systems31(9) (2018), 886–920.
21.
GargH., Generalized Pythagorean Fuzzy Geometric Aggregation Operators Using Einstein t-Norm and t-Conorm for Multicriteria Decision-Making Process, International Journal of Intelligent Systems32(16) (2017), 597–630.
22.
HashmiM.R., RiazM. and SmarandacheF., m-polar neutrosophic topology with applications to multi-criteria decision-making in medical diagnosis and clustering analysis, International Journal of Fuzzy Systems22(1) (2020), 273–292.
23.
HashmiM.R. and RiazM., A novel approach to censuses process by using Pythagorean m-polar fuzzy Dombi’s aggregation operators, Journal of Intelligent & Fuzzy Systems38(2) (2020), 1977–1995.
24.
KumarK. and GargH., TOPSIS method based on the connection number of set pair analysis under interval- valued intuitionistic fuzzy set environment, Computational and Applied Mathematics37(2) (2018), 1319–1329.
25.
NaeemK., RiazM., PengX.D. and AfzalD., Pythagorean fuzzy soft MCGDM methods based on TOPSIS, VIKOR and aggregation operators, Journal of Intelligent & Fuzzy Systems37(5) (2019), 6937–6957.
26.
NaeemK., RiazM. and AfzalD., Pythagorean m-polar fuzzy sets and TOPSIS method for the selection of advertisement mode, Journal of Intelligent & Fuzzy Systems37(6) (2019), 8441–8458.
27.
HazraH., MajumdarP. and SamantaS.K., Soft Topology, Fuzzy Information Engineering (1) (2012), 105–115. doi: 10.1007/s12543-012-0104-2
28.
LiZ. and CuiR., On the topological structure of intuitionistic fuzzy soft sets, Annals of Fuzzy Mathematics and Informatics5(1) (2013), 229–239.
29.
MolodtsovD., Soft set theory-first results, Computers and Mathematics with Applications37 (1999), 19–31.
30.
OsmanogluI. and TokatD., On intuitionistic fuzzy soft topology, Gen Math Notes19(2) (2013), 59–70.
31.
PawlakZ., Rough sets, International Journal of Computer & Information Sciences11 (1982), 341–356.
32.
PengX.D. and YangY., Some results for Pythagorean fuzzy sets, International Journal of Intelligent Systems30(11) (2015), 1133–1160.
33.
PengX.D., YuanH.Y. and YangY., Pythagorean fuzzy information measures and their applications, International Journal of Intelligent Systems32(10) (2017), 991–1029.
34.
PengX.D. and SelvachandranG., Pythagorean fuzzy set: state of the art and future directions, Artificial Intelligence Review52 (2019), 1873–1927.
35.
PengX.D., YangY.Y., SongJ. and JiangY., Pythagorean fuzzy soft set and its application, Computer Engineering41(7) (2015), 224–229.
36.
PengX.D. and LiuL., Information measures for q-rung orthopair fuzzy sets, International Journal of Intelligent Systems34(8) (2019), 1795–1834.
37.
RiazM. and HashmiM.R., Fuzzy parameterized fuzzy soft topology with applications, Annals of Fuzzy Mathematics and Informatics13(5) (2017), 593–613.
38.
RiazM., ÇağmanN., ZareefI. and AslamM., N-soft topology and its applications to multi-criteria group decision making, Journal of Intelligent & Fuzzy Systems36(6) (2019), 6521–6536.
39.
RiazM., SmarandacheF., FirdousA. and FakharA., On soft rough topology with multi-attribute group decision making, Mathematics7(67) (2019), 1–18.
40.
RiazM., DavvazB., FirdousA. and FakharA., Novel concepts of soft rough set topology with applications, Journal of Intelligent & Fuzzy Systems36(4) (2019), 3579–3590.
41.
RiazM., DavvazB., FakharA. and FirdousA., Hesitant fuzzy soft topology and its applications to multiattribute group decision-making, Soft Computing (2020), DOI:10.1007/s00500-020-04938-0
42.
RiazM. and HashmiM.R., MAGDM for agribusiness in the environment of various cubic m-polar fuzzy averaging aggregation operators, Journal of Intelligent & Fuzzy Systems37(3) (2019), 3671–3691.
43.
RiazM. and HashmiM.R., Linear Diophantine fuzzy set and its applications towards multi-attribute decision making problems, Journal of Intelligent & Fuzzy Systems37(4) (2019), 5417–5439.
44.
RiazM. and HashmiM.R., Soft rough Pythagorean m-polar fuzzy sets and Pythagorean m-polar fuzzy soft rough sets with application to decision-making, Computational and Applied Mathematics39(1) (2020), 1–36.
45.
RiazM., SalabunW., FaridH.M.A., AliN. and WatróbskiJ., A robust q-rung orthopair fuzzy information aggregation using Einstein operations with application to sustainable energy planning decision management, Energies13(9) (2020), 1–40.
46.
RiazM. and TehrimS.T., Cubic bipolar fuzzy ordered weighted geometric aggregation operators and their application using internal and external cubic bipolar fuzzy data, Computational & Applied Mathematics38(2) (2019), 1–25.
47.
RiazM. and TehrimS.T., Multi-attribute group decision making based cubic bipolar fuzzy information using averaging aggregation operators, Journal of Intelligent & Fuzzy Systems37(2) (2019), 2473–2494.
48.
RiazM. and TehrimS.T., Bipolar fuzzy soft mappings with application to bipolar disorder, International Journal of Biomathematics12(7) (2019), 1–31.
49.
RiazM. and TehrimS.T., Cubic bipolar fuzzy set with application to multi-criteria group decision making using geometric aggregation operators, Soft Computing (2020), DOI. 10.1007/s00500-020-04927-3
50.
RoyS. and SamantaT.K., A note on a soft topological space, Punjab University Journal of Mathematics46(1) (2014), 19–24.
51.
ShabirM. and NazM., On soft topological spaces, Computers and Mathematics with Applications61 (2011), 1786–1799.
52.
TehrimS.T. and RiazM., A novel extension of TOPSIS to MCGDM with bipolar neutrosophic soft topology, Journal of Intelligent & Fuzzy Systems37(4) (2019), 5531–5549.
53.
VarolB.P., ShostakA. and AygunH., A new approach to soft topology, Hacettepe Journal of Mathematics and Statistics41(5) (2012), 731–741.
54.
YagerR.R., Pythagorean fuzzy subsets, IFSA World Congress and NAFIPS Annual Meeting 2013 Joint, Edmonton, Canada, IEEE (2013), 57–61.
55.
YagerR.R. and AbbasovA.M., Pythagorean membership grades, complex numbers, and decision making, International Journal of Intelligent Systems28(5) (2013), 436–452.
56.
YagerR.R., Pythagorean membership grades in multi-criteria decision making, IEEE Transactions on Fuzzy Systems22(4) (2014), 958–965.
ZadehL.A., Fuzzy sets, Information Control8 (1965), 338–356.
59.
ZhangX.L. and XuZ.S., Extension of TOPSIS to multiple criteria decision making with Pythagorean fuzzy sets, International Journal of Intelligent Systems29 (2014), 1061–1078.
60.
ZhanJ., LiuQ. and HerawanT., A novel soft rough set: soft rough hemirings and its multicriteria group decision making, Applied Soft Computing54 (2017), 393–402.
61.
ZhanJ., AliM.I. and MehmoodN., On a novel uncertain soft set model: Z-soft fuzzy rough set model and corresponding decision making methods, Applied Soft Computing56 (2017), 446–457.
62.
ZhanJ. and AlcantudJ.C.R., A novel type of soft rough covering and its application to multicriteria group decision making, Artificial Intelligence Review52 (2019), 2381–2410.
63.
ZhangL. and ZhanJ., Fuzzy soft β-covering based fuzzy rough sets and corresponding decision-making applications, International Journal of Machine Learning and Cybernatics10 (2019), 1487–1502.
64.
ZhangL., ZhanJ. and AlcantudJ.C.R., Novel classes of fuzzy soft β-coverings-based fuzzy rough sets with applications to multi-criteria fuzzy group decision making, Soft Computing23 (2019), 5327–5351.
65.
ZorlutunaI. and AtmacaS., Fuzzy parameterized fuzzy soft topology, New Trends in Mathematical Sciences4(1) (2016), 142–152.