This paper aims to construct a finite impulse response (FIR) based fault estimator for a class of linear discrete time-varying systems (LDTV) with multiplicative noise. Drawing support of intensive stochastic analyses and matrix manipulations, a novel performance index is proposed such that the fault estimation error is minimized in stochastic sense. A necessary and sufficient condition is established to guarantee the existence of the FIR-based fault estimator with satisfied estimation accuracy. The optimal gain of the desired fault estimator is calculated in an analytical way by minimizing the aforementioned performance index. Several examples are presented to demonstrate the effectiveness and superiority of the proposed methods.
Initiated from the pioneering work of Beard and Jones in the early 1970s, model-based fault diagnosis methods have already made remarkable achievements since then, and numerous research outcomes have been recorded in the recent literatures, for example, Frank (1990); Ding (2008); Yin et al. (2017); Zaytoon and Lafortune (2013); Yin and Zhu (2015); and Gao et al. (2015), as well as the references therein. More recently, due to the complex/harsh work environments, model uncertainties have to be taken into account in the course of system analysis/synthesis, shifting the focuses on robust model-based fault diagnosis fields. The connotation behinds these methods relevant to robust fault diagnosis applications, is either to construct a fault indicator to generate residual that is sensitive to specific faults and robust to the uninterested informations simultaneously, or to design a fault estimator that shows fault amplitude and type appropriately under various of unexpected external inputs or mismatched terms, see, for example, Zhou et al. (2018); Abbasi and Poshtan (2018); Li et al. (2018a); Zhao et al. (2018); Wei et al. (2017); and Shokouhi-Nejad et al. (2019) for some recent research efforts.
Multiplicative noise is widely used to represent model uncertainty in state space representation and plays a significant role in many practical engineering fields, such like aerospace, machinery, chemical reaction, communication and so forth. Moreover, in response to the rapidly growing demand for dependability and reliability of safe-critical industrial systems, only providing an alarm is insufficient when the systems operate abnormally. Accurate size and shape of the fault are further needed for the subsequent task of fault compensation or fault-tolerant control. Naturally, fault estimation, helping reconstruct the fault signals, has stirred much research interest, such as Li and Zhong (2011); Chu et al. (2013); Jiang and Fang (2014); Yue et al. (2016); Fang and Jiang (2011). It is very often the case that, owing to a variety of factors such as temperature, changes of the operating point, as well as normal wear and tear of components, the time-varying and nonlinear behaviors are ubiquitous in practice (Dong et al., 2016; Zhong et al., 2018). It is thus theoretically important and practically significant to devote more efforts to robust fault estimation problems for linear discrete time-varying (LDTV) systems with multiplicative noise. We refer to Li and Zhou (2009); Zhong et al. (2016); Li et al. (2018b); Shen et al. (2015) and references therein for the latest developments about the related topics.
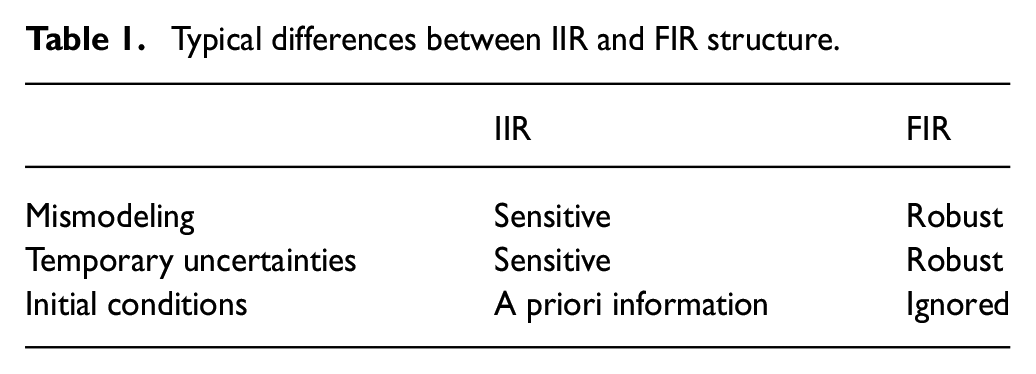
It is noteworthy that, an infinite impulse response (IIR) structure, which contains all measured outputs with equaling weighting from initial time zero to the current time instant, is commonly utilized to tackle with fault estimation problems for dynamic systems in most existing literatures. Having said that, due to the limitation of the current modeling techniques, it is difficult to find a perfect model matching the actual process completely. Moreover, even if the process is represented in state space accurately, it may undergo unpredictable changes during its long time operation, which may just emerge in a short time, such as jumps in frequency, phase, and velocity. Consequently, the concerned plant not only consists of inevitably inherent mismodeling (explicit uncertainties) but also some temporary uncertainties (implicit uncertainties) (Shmaliy et al., 2017b; Zhao et al., 2017).Worse still, collecting accurate initial values is a cost efficiently, time consuming and impractical process (Zhao and Huang, 2017). Eventually, the aforementioned mismatching (dynamic basis and estimated errors) will accumulate continuously in such recursive structures, which are typically not tolerated in real-world applications (Shmaliy et al., 2017a). On account of these structural disadvantages, it may be sensible to select finite impulse response (FIR) filter, discarding all the past measurements outside the most recent time interval, as an efficient substitute of IIR in handling the fault estimation problems for systems with stochastic uncertainty (Jazwinski, 1968, 1970). Attributed to the batch form structure of FIR, not only does it not require a priori information about the initial state, but also it guarantee sufficient robustness to mismodeling compared with IIR (Dan and Shmaliy, 2013; Cho and Kim, 2008; Kwon et al., 1999). The major differences between IIR and FIR can be briefly concluded as shown in Table 1.
Typical differences between IIR and FIR structure.
IIR
FIR
Mismodeling
Sensitive
Robust
Temporary uncertainties
Sensitive
Robust
Initial conditions
A priori information
Ignored
With respect to the diverse applications of FIR, some literatures are available over the past years. On one hand, the traditional parity space method, characterized by the sliding window, can be regarded as a special form of FIR structure based algorithm to some extent. Among the application related to this topic, Zhong et al. (2010) propose a parity space-based fault estimator design algorithm, where the addressed performance index, conditions for the existence of the estimator and the analytic solution of optimal parity matrix are provided simultaneously. However, this method is only applicable to the deterministic time-varying systems. In addition, although the fault detection problem for networked control systems subject to random packet dropout is dealt with by the parity space method in Wang et al. (2009), the performance index chosen by Wang et al. (2009) may lose its high robustness to model uncertainties for LDTV systems with multiplicative noise. On the other hand, very recently, borrowing from the schemes of FIR, state estimation has been attached high importance for the past few decades, such as Ahn et al. (2016); Kwon et al. (2002); Zhao et al. (2015); and Pak et al. (2015), but leaving less attention paid to fault diagnosis applications. Despite the fact that fault estimation problems for a group of systems with additive noise has been investigated in Zhao and Huang (2017) and Graton et al. (2014), fault estimation issues for LDTV systems with multiplicative noise are receiving insufficient attentions in the open literatures.
Motivated by the aforementioned observations, we will spare no efforts to propose a novel FIR based algorithm to achieve the fault estimation purpose for LDTV systems with multiplicative noise. The contributions of this work have three folds:
(1): A novel performance index, aiming at minimizing the fault estimation error via FIR filter, is presented.
(2): A sufficient and necessary condition for the existence of the designed FIR filter is derived.
(3):An analytical form rather than a numerical one of the optimal filter gain matrix is obtained.
Notation: The notation used here is fairly standard except where otherwise stated. denotes the -dimensional Euclidean space. means the expectation of the stochastic variable . The notation , where are real symmetric matrix, means that is positive definite. and represent the transpose and inverse of the respectively. denotes the identity matrix of compatible dimensions. ⊗ and denote the Kronecker product and the vectorization function respectively.
Problem formulation
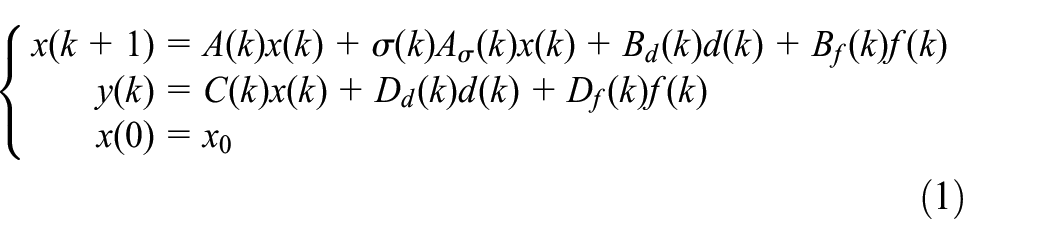
Consider the following LDTV system with multiplicative noise
where , , and denote the state vector, output vector, external disturbance and the fault signal to be estimated respectively of system (1). , , , , , , are all known time-varying matrices with appropriate dimensions. is the unknown initial state. is a standard random scalar white noise sequence with zero mean that satisfies
where is the Kronecker delta function.
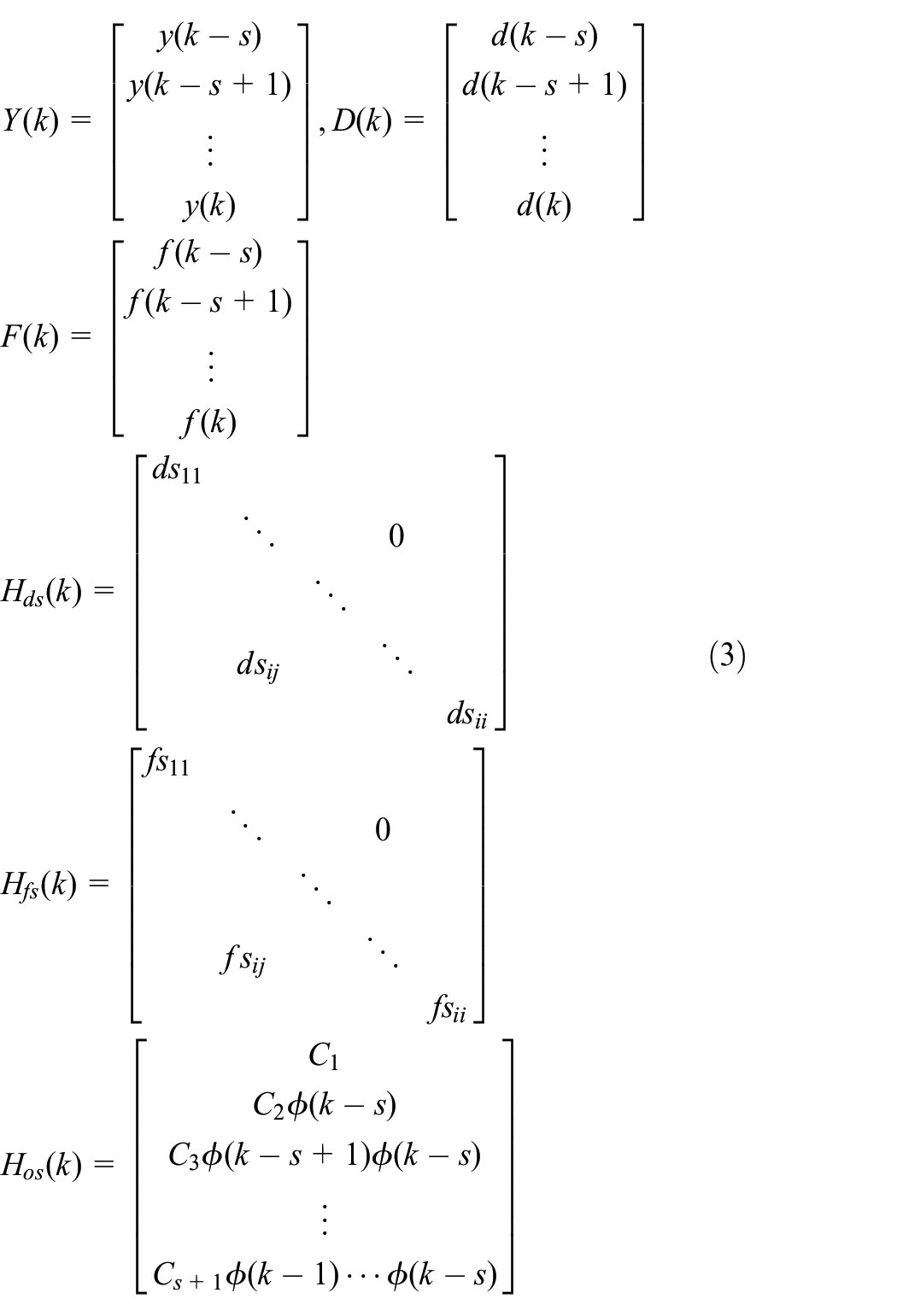
The core of this paper is to employ FIR filter to reconstruct the fault signal for systems (1) within the sliding window . Under the influence of and model uncertainties , the extended output vector , conditioned on the history of measurements received within a fixed-length is expressed as follows
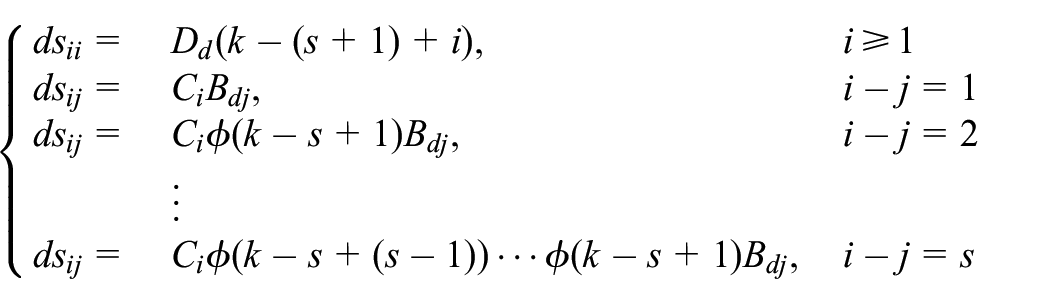
where specific expression of , , , , , are denoted as
with
Owing to the fact that can be constructed in the similar way with , just replacing and with and respectively within , its expression is not repeated here.
Under the hypothesis that all the process data within the fixed time interval are available, the residual dynamics (estimated fault signal) is established
where is the estimation provided by the filter and is the filter gain to be designed.
Different from the deterministic situation concerned in Zhong et al. (2010), no matter how to select , a perfect decoupling between and is not possible due to the existence of random matrix . However, it can be observed that, sustains the effects only by the fault informations prior to the concerned time interval, i.e. from (1). Nothing else than this fact, it is reasonable to regard as the disinterested informations together with during the fault estimation process. Subsequently, the estimation error at the current time instant can be defined as
with
Here, is a weighting matrix, which can be set as
for the purpose of delivering an optimal estimation of from .
Obviously, it is necessary to make as small as possible in stochastic sense for the sake of more convening estimation result. Consequently, a natural choice is to select as the performance index.
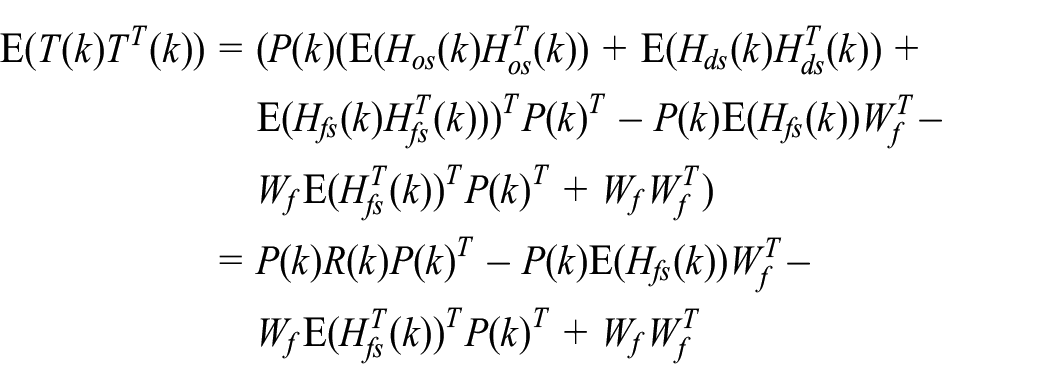
It is not difficult to see that
Taking the trace of the scalar on the right side of (8) and utilizing the fact that the trace and expectation operators of the matrix are commutative in the calculation order, equation (8) can be rewritten as
Note that, there will be holds for any matrix . In view of this, we can get that
It should be pointed out that will be affected by , while will suffer influence from . In this way, there is no crossing term of between and . Combining with the mutually uncorrelated property of , equation (9) can be partitioned as
Seeing the fact that if is a Hermite positive semidefinite matrix, while is a Hermite matrix, then it will be
As a result, we have that
Subsequently, considering the fact that there is no design freedom in , it is reasonable to search the minimum of to improve the accuracy of fault estimation combining (10) and (11) rather than directly minimizing .
Thus, the purpose of the considered issue is formulated as to solve the minimization problem of described as follows.
Problem 1: For system (1), given all the concerned measured outputs , associating with (6), find the optimal filter gain such that
Remark 1: Throughout this paper, different choice of weighting matrix serves as different estimation purpose.
Specifically, in fact, what we mentioned earlier in (7) is a simple special case and without lose generality, can be chosen as
where are nonnegative integer subject to . In this format, it will deliver an optimal estimation of . Furthermore, if is selected as
will indicate the change of fault signal at each time instant and average value over the time interval .
Main results
In this section, we will provide solution to Problem 1 step by step.
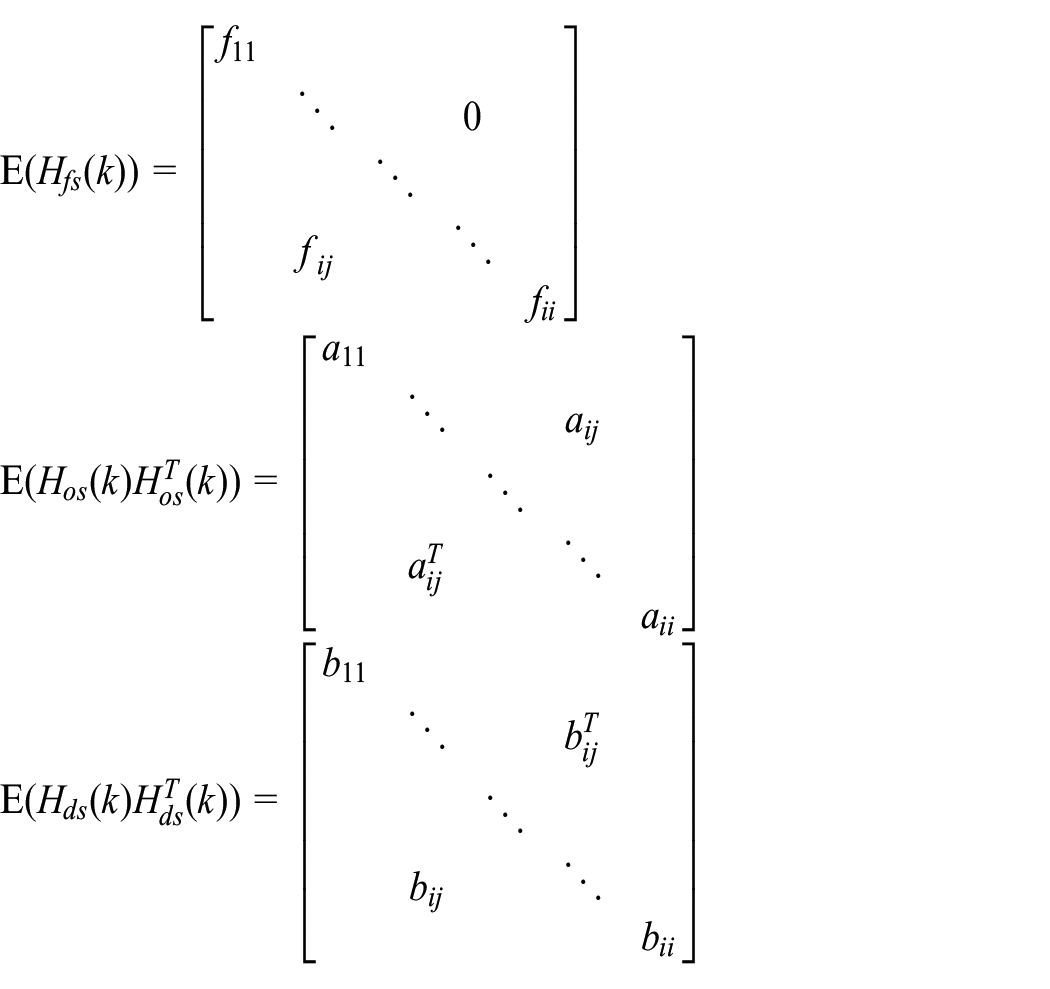
Noticing that, can be rewritten in details as
where
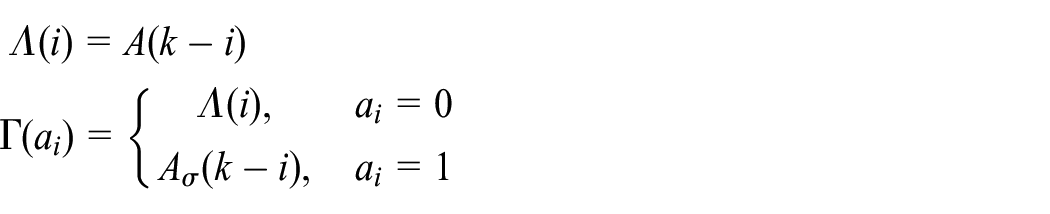
The key step to work out the expression of is to obtain . For the sake of simplifying notations, we define
Consequently, , and are summarized in the following theorem.
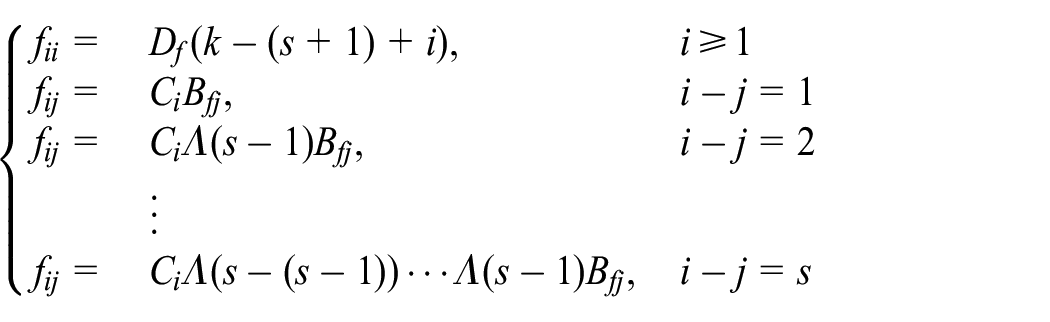
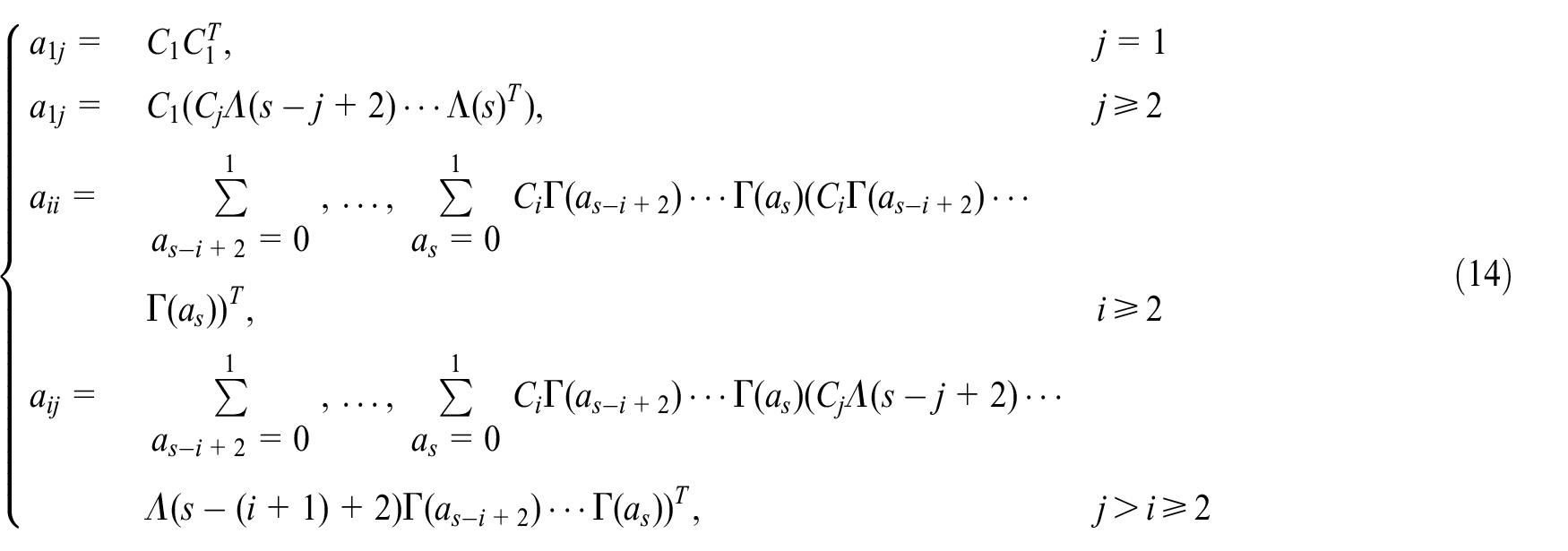
Theorem 1: For systems (1), matrix , and can be calculated as follows
where
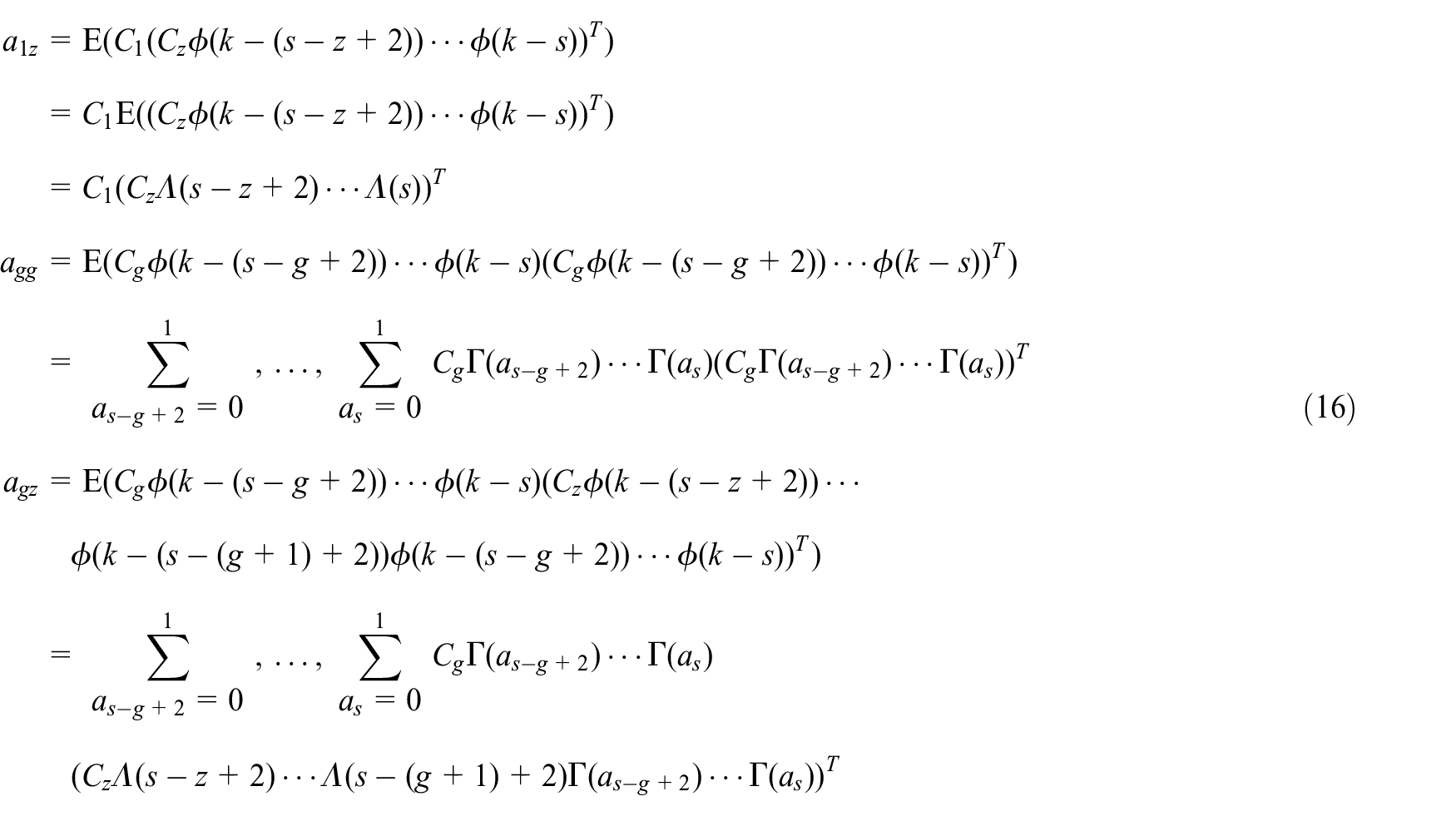
Proof: Firstly, it is easy to prove that , , satisfy the equation (14) respectively.
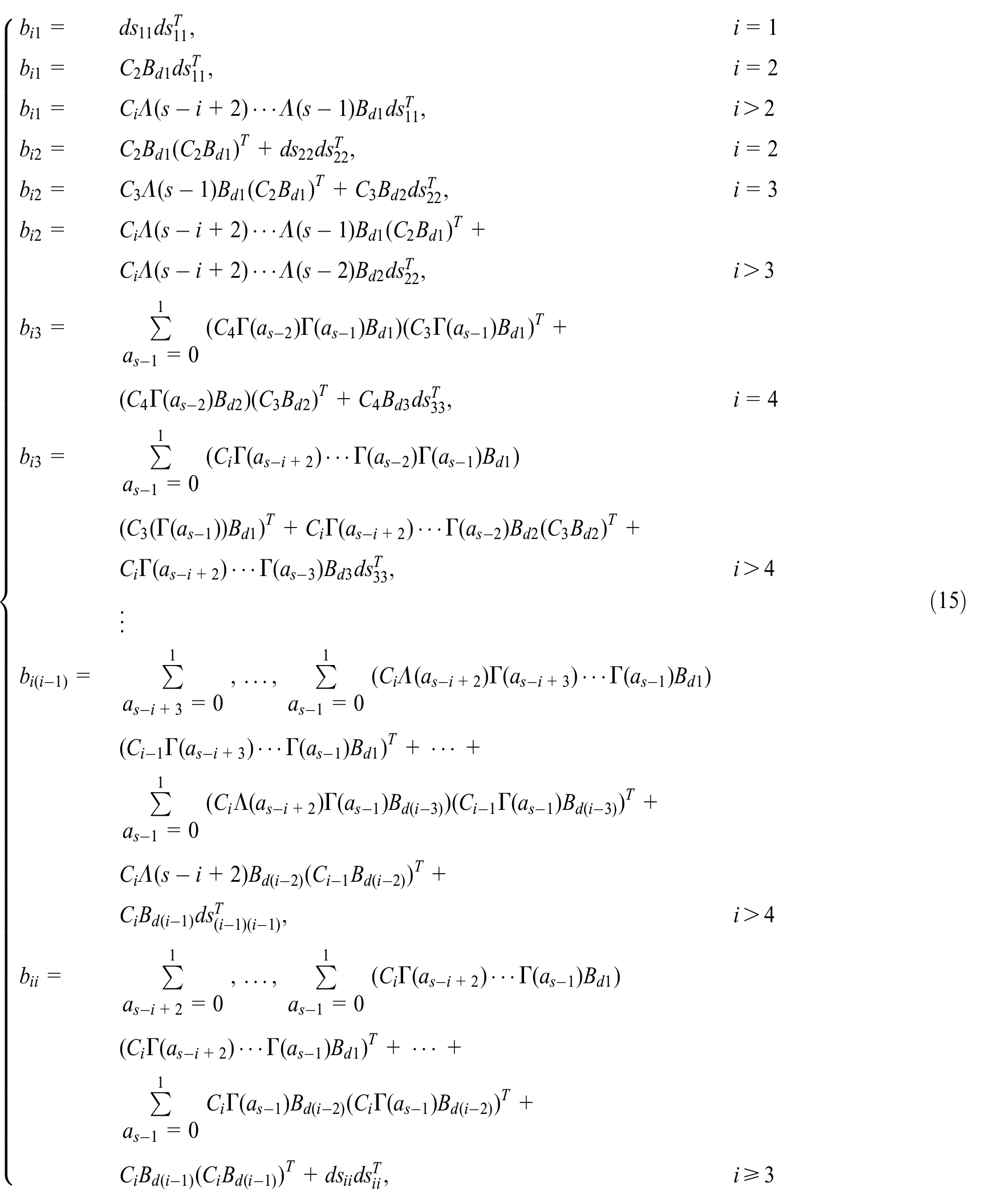
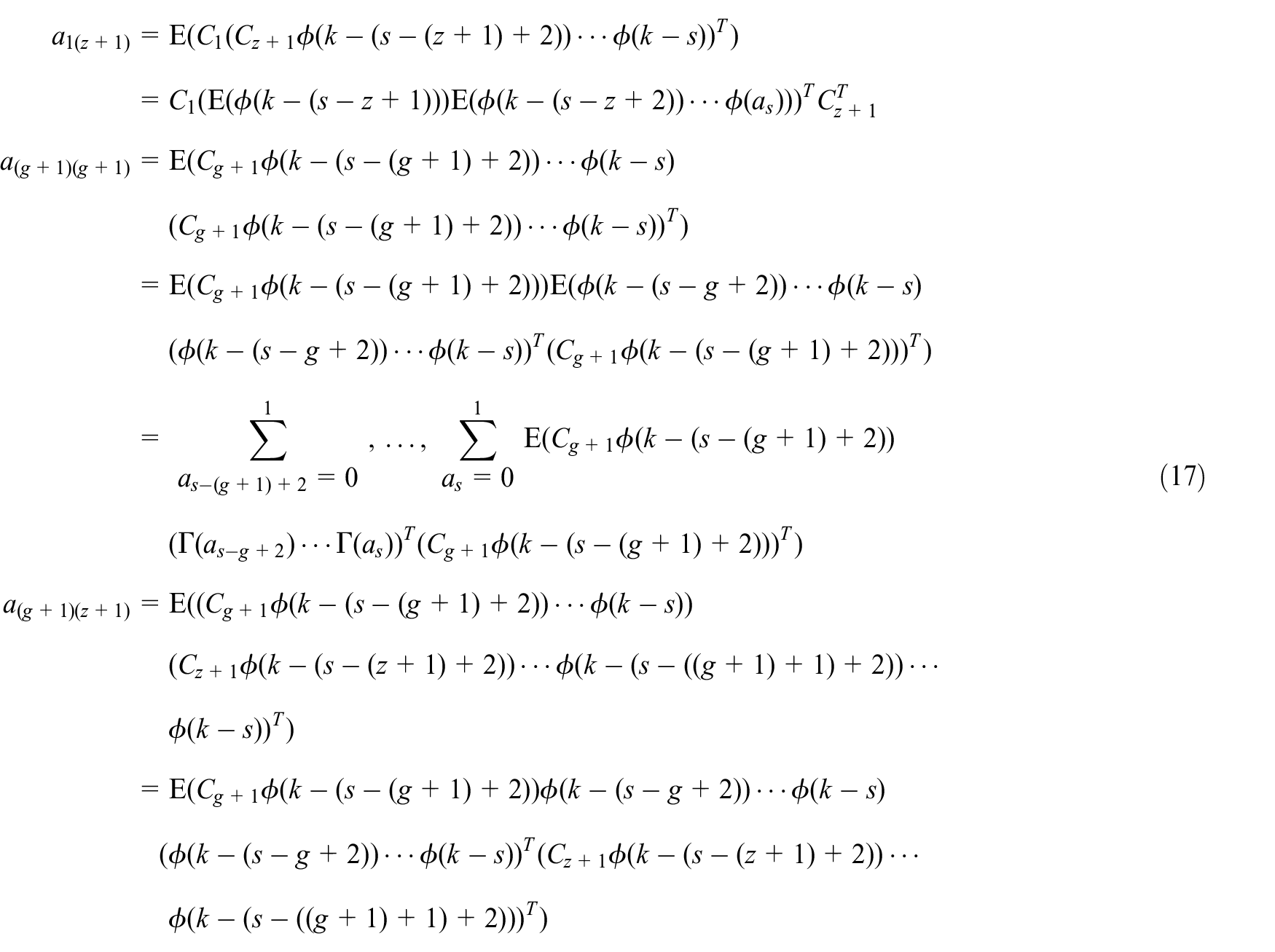
Furthermore, provided that , , , satisfy the formula (14), that is
the expressions corresponding to turn out to be as follows
Due to the existence of and its statistical property, we have that
which shows that , , satisfy the equations we presented in (14) as well.
In addition, it is evident that can be derived following (3) by replacing with , where corresponding proof details are omitted here. This completes the proof.
Following the same line above, we can directly obtain by replacing and with and respectively in matrix .
Lemma 1: Provided that is continuous, matrix is the only stationary point of if and only if it satisfies
Here, and refer to Gradient and Hessian matrix of , respectively.
In what follows, we give the main result of this paper.
Theorem 2: For systems (1), if in (13) is positive definite, the optimal filter gain can be selected as
to achieve the purpose of optimal fault estimation, where matrix , and can be obtained directly according to Theorem 1.
Proof: According to Lemma 1, if the existence condition is met, the minimum solution for can be derived by solving the first order differential equation
Furthermore, it can easily get
Suppose now that is positive definite, we can draw a conclusion that corresponding minimum solution must exist and is derived as (19). This completes the proof.
The complete FIR filter-based design algorithm for realizing optimal fault estimation of system (1) can be concisely summarized as follows.
Algorithm 1: (On-line implementation of fault estimation based on FIR filter)
Step 1: Give a known window length and , obtain in (3).
Step 2: Using the Theorem 1, obtain , and . Following the Theorem 2, calculate .
Step 3: If , applying the Theorem 2, obtain ;
If , end.
Step 4: Increase and go to Step 1.
Remark 2: In order to guarantee the existence of optimal gain , should be positive definite at each time instant following Theorem 2. One can observe that, if is of full row rank almost surely, is positive definite almost surely, which will infer that is positive definite such that . To ensure the lower triangular matrix is of full row rank, one condition is with full row rank for all , which is a general assumption according to Li and Zhou (2009) and Zhong et al. (2016). In case that does not meet the requirement of positive definite, we can take a sufficient small positive real number to construct
as a substitution of the original such that the proposed algorithm gives a suboptimal solution to the concerned problem.
Illustrative examples
In this section, several examples will be considered to illustrate the validity and superiority of our proposed method.
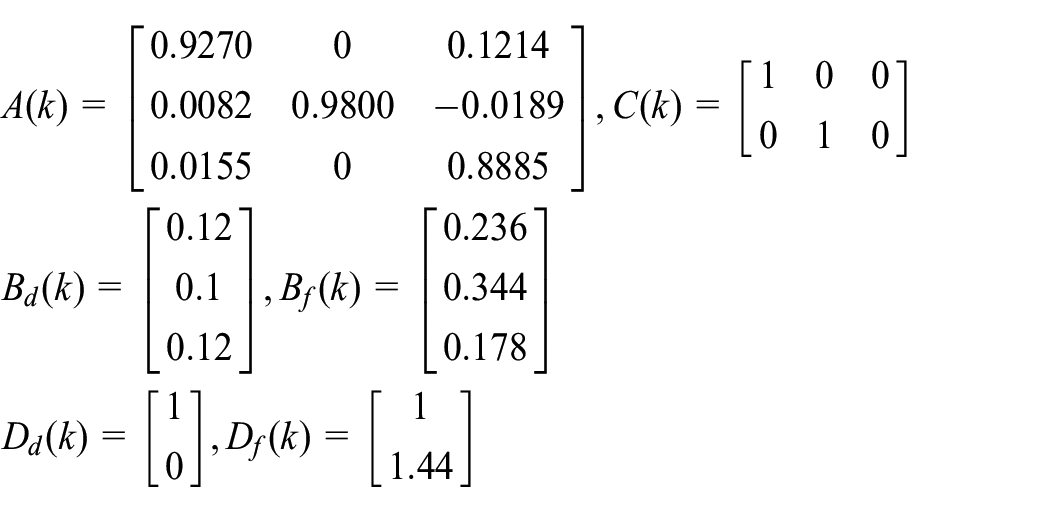
Example 1: The following F-404 aircraft engine system described in Li and Sun (2015) with parameter matrices is adopted as
where the initial state is a random vector with appropriate dimension.
Due to its complex/harsh work environments, we introduce a set of white Gaussian noise , mutually uncorrelated to the initial state , to represent the inevitably model uncertainties within its mathematical model, where corresponding coefficient matrix in system (1) is set as
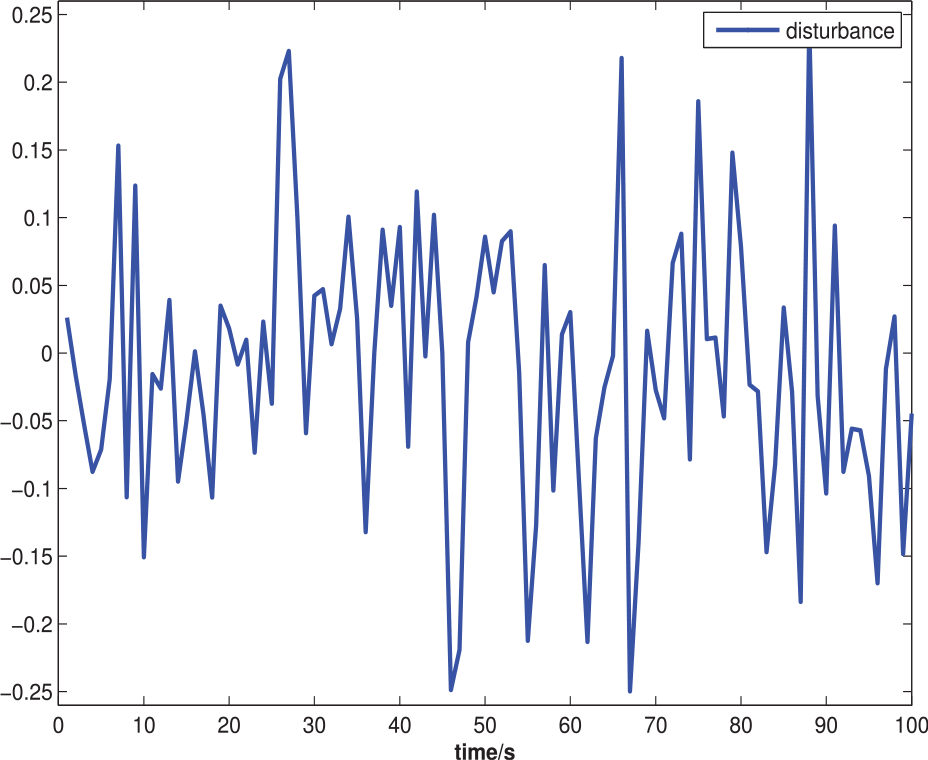
Virtually all aircraft engine systems are disturbed by uncontrolled external forces to some extent, such as wind gusts, gravity gradients, structural vibrations, or sensor and actuator noise, the unknown exogenous disturbance we considered is shown in Figure 1.
The disturbance.
Assume a sine-wave signal , described in the following way, occurs in the considered system.
Let and recalling that the effect resulted by sensor fault is reflected in the output signal directly in time, while actuator fault has one-step delay phenomenon from (1), we thus divide the engineering-oriented example into sensor fault (Case 1) and actuator case (Case 2) to achieve different fault estimation purpose by choosing without loss generality.
Case 1: Let as zero matrix and the weighting matrix is chosen as
for the purpose of observing .
Case 2: Let as zero matrix and the weighting matrix is chosen as
for the purpose of observing .
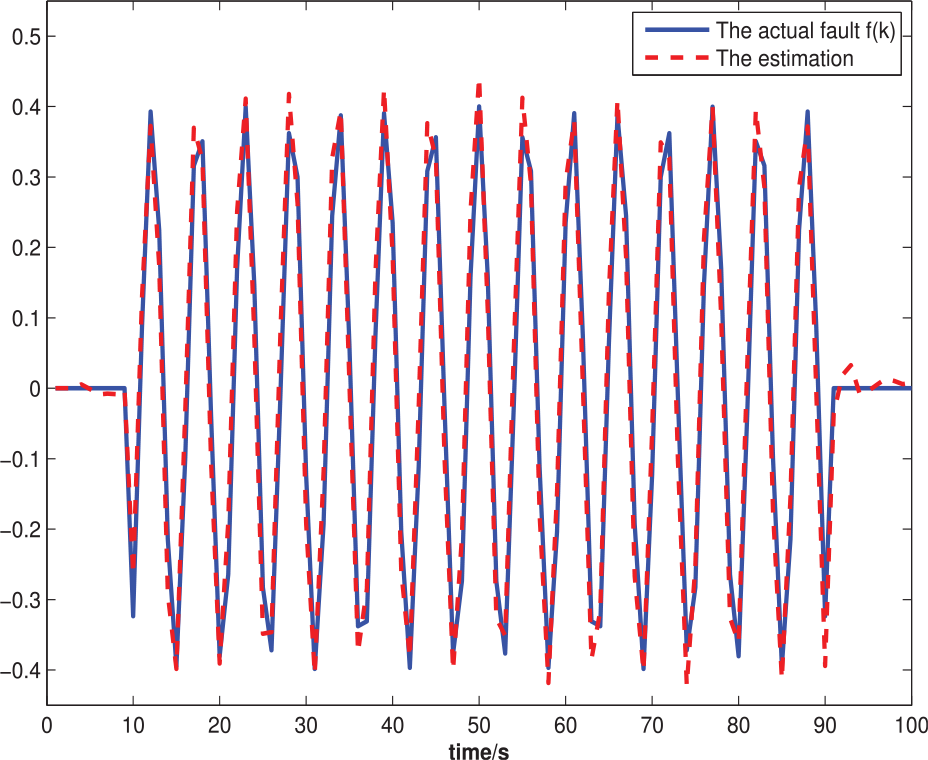
By applying Theorem 2, the fault and its corresponding generated estimation of the above two cases are shown in Figures 2 and 3, respectively.
The sensor fault and the corresponding estimation.
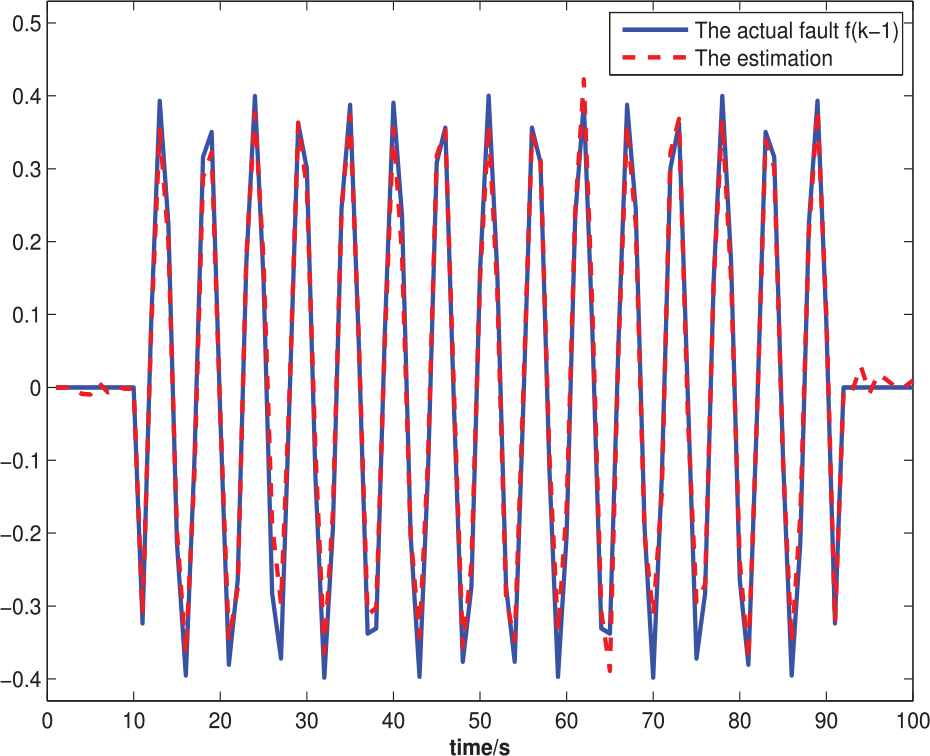
The actuator fault and the corresponding estimation.
It can be concluded that our estimation signal can track the behavior of the fault signals in a desired manner in the presence of stochastic uncertainty.
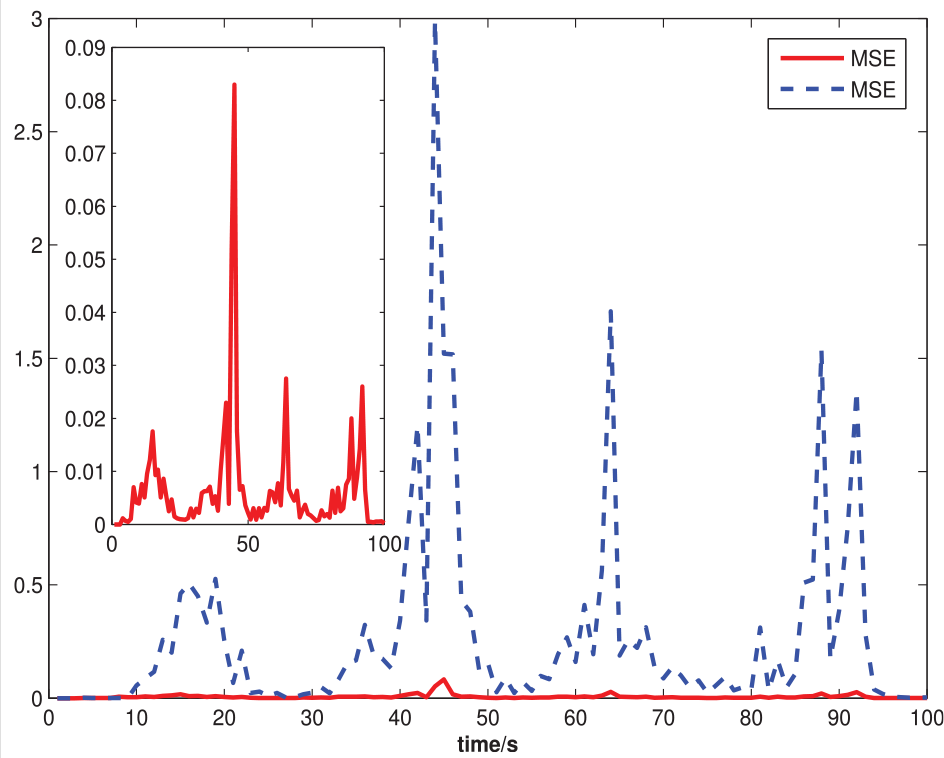
Apart from the potential practical application shown in the Example 1, we compare with an IIR structure based algorithm proposed by Li and Zhong (2011) (Example 2.1) and parity space method proposed in Zhong et al. (2010) (Example 2.2) to illustrate our superiority respectively below.
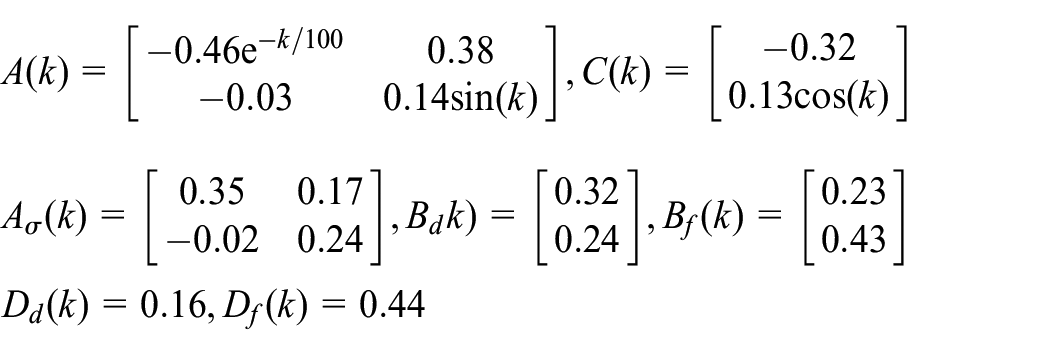
Example 2.1: Consider a LDTV system with multiplicative noise described by (1) with the following parameters
All the other settings are the same as Case 1 in Example 1, except that the fault signal is selected as
Subsequently, mean square error (MSE) is used as an evaluation index to quantify how many improvements our method have been made. In combination with the already declared symbols, we definite MSE in the following way
where is the true fault value of simulation, is the corresponding fault estimation value, is the total number of simulations.
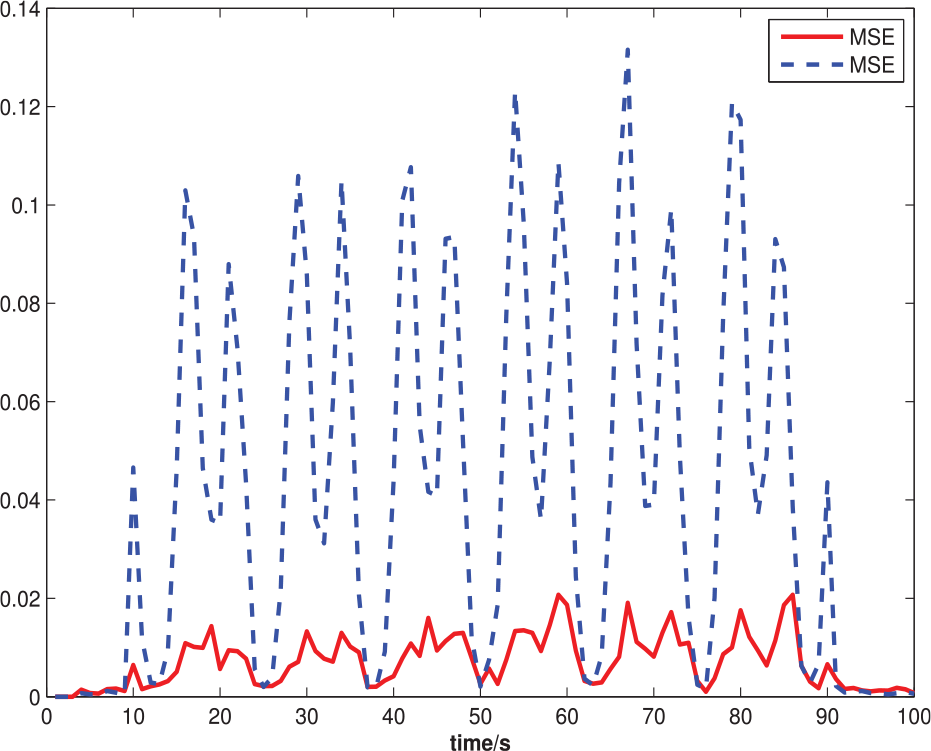
In this example, we set and the MSE of each time instant of Li and Zhong (2011) and ours are calculated respectively following (22) under the same condition within the time interval , whose results are shown in the Figure 4, where the dashed line and the solid line represent the MSE of the algorithm proposed by Li and Zhong (2011) and our algorithm, respectively.
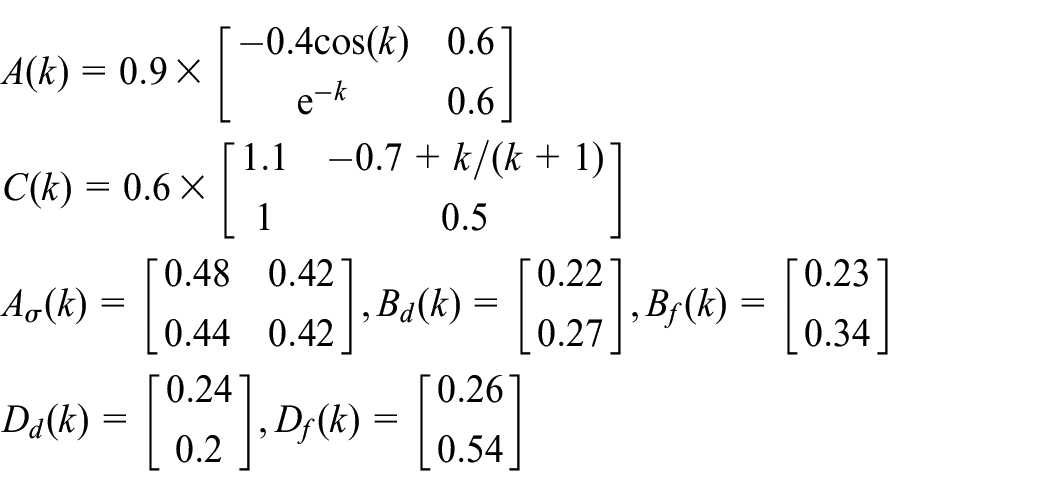
Example 2.2: Suppose the considered system takes the following coefficients
We assume the following fault signal occurs in the system (1) and all the other settings are the same as Case 1 in Example 1.
By artificially ignoring the multiplicative noise terms, we apply the method proposed in Zhong et al. (2010) to obtain the estimation and calculate the MSE at each time instant following (22). Subsequently, following the Theorem 2 and associating with (22), we derive our results in MSE and a corresponding comparing profile is derived in Figure 5, where the dashed line and the solid line represent the MSE of the algorithm proposed by Zhong et al. (2010) and our algorithm, respectively.
It can be concluded from Example 2.1 and 2.2 that the proposed algorithm provide higher fault estimation accuracy for LDTV systems in the presence of stochastic uncertainties.
Conclusion
In this study, a FIR filter based fault estimation problem for LDTV systems with multiplicative noise has been investigated. For the sake of satisfactory fault estimation error, a novel performance index has been proposed with the assistance of intensive stochastic analyses and matrix manipulations. In order to guarantee the existence of the filter, a necessary and sufficient condition has been established. It has been shown that, the deduced optimal solution to the aforementioned minimization problem renders an analytical optimal filer gain available. Effectiveness and superiority of our proposed method have been illustrated via several examples.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported in part by the National Natural Science Foundation of China under Grant Nos. 61973135, 61773242 and 61633014, the Shandong Provincial Key R&D Program, China, under Grant No. 2018GGX104025, and the project ZR2017QF007 and ZR2018MF021 supported by Shandong Provincial Natural Science Foundation.
ORCID iD
Yueyang Li
References
1.
AbbasiAPoshtanJ (2018) An unknown input observer-based decentralized fault detection and isolation for a class of large-scale interconnected nonlinear systems. Transactions of the Institute of Measurement and Control40(8): 2599–2606.
2.
AhnCKShiPBasinMV (2016) Deadbeat dissipative FIR filtering. IEEE Transactions on Circuits & Systems63-I(8): 1210–1221.
3.
ChoSYKimBD (2008) Adaptive IIR/FIR fusion filter and its application to the INS/GPS integrated system. Automatica44(8): 2040–2047.
4.
ChuDSTengZJZhangL (2013) Actuator fault detection and estimation algorithm for a class of system with multiplicative noise. Periodical of Ocean University of China43(6): 93–97.
5.
DanSShmaliyYS (2013) Unified forms for Kalman and finite impulse response filtering and smoothing. Automatica49(6): 1892–1899.
6.
DingSX (2008) Model-based Fault Diagnosis Techniques: Design Schemes, Algorithms, and Tools. Berlin Heidelberg: Springer.
7.
DongHLWangZDDingSX, et al. (2016) On estimation of randomly occurring faults for a class of nonlinear time-varying systems with fading channels. IEEE Transactions on Automatic Control61(2): 479–484.
8.
FangHJJiangS (2011) State and fault simultaneous estimation for nonlinear networked system with random packet dropout and time delay. In: Proceedings of the 30th Chinese Control Conference, Yantai, China, 22–24 July 2011, pp. 4555–4559.
9.
FrankPM (1990) Fault diagnosis in dynamic systems using analytical and knowledge-based redundancy: A survey and some new results. Automatica26(3): 459–474.
10.
GaoZWCecatiCDingSX (2015) A survey of fault diagnosis and fault-tolerant techniques-part I: Fault diagnosis with model-based and signal-based approaches. IEEE Transactions on Industrial Electronics62(6): 3757–3767.
11.
GratonGKratzFFantiniJ (2014) Finite memory observers for linear time-varying systems: Theory and diagnosis applications. Journal of the Franklin Institute351(2): 785–810.
JazwinskiAH (1970) Stochastic Processes and Filtering Theory. New York: Academic.
14.
JiangSFangHJ (2014) Fault estimation for nonlinear networked systems with time-varying delay and random packet dropout. Asian Journal of Control16(1): 126–137.
15.
KwonWHKimPSHanSH (2002) A receding horizon unbiased FIR filter for discrete-time state space models. Automatica38(3): 545–551.
16.
KwonWHKimPSParkPG (1999) A receding horizon Kalman FIR filter for linear continuous-time systems. IEEE Transactions on Automatic Control44(11): 2115–2120.
17.
LiXBZhouKM (2009) A time domain approach to robust fault detection of linear time-varying systems. Automatica45(1): 94–102.
18.
LiXHKarimiHRWangYY, et al. (2018a) Robust fault estimation and fault-tolerant control for Markovian jump systems with general uncertain transition rates. Journal of the Franklin Institute355(8): 3508–3540.
19.
LiXYSunSL (2015) filtering for networked linear systems with multiple packet dropouts and random delays. Digital Signal Processing46(C): 59–67.
20.
LiYYZhongMY (2011) Fault detection filter design for linear discrete time-varying systems with multiplicative noise. Journal of Systems Engineering and Electronics22(6): 982–990.
21.
LiYYKarimiHRZhongMY, et al. (2018b) Fault detection for linear discrete time-varying systems with multiplicative noise: The finite-horizon case. IEEE Transactions on Circuits & Systems65-I(10): 3492–3505.
22.
NocedalJWrightSJ (1999) Numerical Optimization. New York: Springer.
23.
PakJMAhnCKShmaliyYS, et al. (2015) Improving reliability of particle filter-based localization in wireless sensor networks via hybrid particle/FIR filtering. IEEE Transactions on Industrial Informatics11(5): 1089–1098.
24.
ShenBWangZDDongHL, et al. (2015) Finite-horizon distributed fault estimation for time-varying systems in sensor networks: A Krein-space approach. Ifac Papersonline48(21): 48–53.
25.
ShmaliyYSKhanSHZhaoSY, et al. (2017a) General unbiased FIR filter with applications to GPS-based steering of oscillator frequency. IEEE Transactions on Control Systems Technology25(3): 1141–1148.
26.
ShmaliyYSZhaoSYAhnCK (2017b) Unbiased finite impluse response filtering: An iterative alternative to kalman filtering ignoring noise and initial conditions. IEEE Control Systems37(5): 70–89.
27.
Shokouhi-NejadHGhiasiARBadamchizadehMAPezeshkiS (2019) simultaneous fault detection and control for continuous-time linear switched delay systems under asynchronous switching. Transactions of the Institute of Measurement and Control41(1): 263–275.
28.
WangYQHaoYDingSX, et al. (2009) Residual generation and evaluation of networked control systems subject to random packet dropout. Automatica45(10): 2427–2434.
29.
WeiYLQiuJBKarimiHR (2017) Reliable output feedback control of discrete-time fuzzy affine systems with actuator faults. IEEE Transactions on Circuits & Systems64-I(1): 170–181.
30.
YinSZhuXP (2015) Intelligent particle filter and its application to fault detection of nonlinear system. IEEE Transactions on Industrial Electronics62(6): 3852–3861.
31.
YinSGaoHJQiuJB, et al. (2017) Descriptor reduced-order sliding mode observers design for switched systems with sensor and actuator faults. Automatica76: 282–292.
32.
YueSHuJChenDY, et al. (2016) Recursive approach to networked fault estimation with packet dropouts and randomly occurring uncertainties. Neurocomputing214(C): 340–349.
33.
ZaytoonJLafortuneS (2013) Overview of fault diagnosis methods for discrete event systems. Annual Reviews in Control37(2): 308–320.
34.
ZhaoDDingSXWangYQ, et al. (2018) Krein-space based robust fault estimation for two-dimensional uncertain linear discrete time-varying systems. Systems & Control Letters115: 41–47.
35.
ZhaoSYHuangB (2017) Iterative residual generator for fault detection with linear time-invariant state–space models. IEEE Transactions on Automatic Control62(10): 5422–5428.
36.
ZhaoSYShmaliyYSHuangB, et al. (2015) Minimum variance unbiased FIR filter for discrete time-variant systems. Automatica53(C): 355–361.
37.
ZhaoSYShmaliyYSShiP, et al. (2017) Fusion Kalman/UFIR filter for state estimation with uncertain parameters and noise statistics. IEEE Transactions on Industrial Electronics64(4): 3075–3083.
38.
ZhongMYDingSXHanQL, et al. (2010) Parity space-based fault estimation for linear discrete time-varying systems. IEEE Transactions on Automatic Control55(7): 1726–1731.
39.
ZhongMYDingSXZhouDH (2016) A new scheme of fault detection for linear discrete time-varying systems. IEEE Transactions on Automatic Control61(9): 2597–2602.
40.
ZhongMYXueTDingSX (2018) A survey on model-based fault diagnosis for linear discrete time-varying systems. Neurocomputing306: 51–60.
41.
ZhouDHJiHQHeX, et al. (2018) Fault detection and isolation of the brake cylinder system for electric multiple units. IEEE Transactions on Control Systems Technology26(5): 1744–1757.