
Abstract
This paper presents a combination of both the Takagi–Sugeno–Kang fuzzy controller and the advantage of reinforcement learning for the reduction in the effect of external disturbances and system uncertainties. A neural network is used for the implementation of a critic network; the parameters are updated using the Lyapunov criteria for avoiding local minima problems. The fewer learning parameters used helps online tuning of the controller by the critic network based on the reward function. MATLAB/Simulink is used for simulation of the proposed system under different conditions in the investigation of the performance of the proposed controller. The actor parameters are updated based on the change in the reward function error and a control function. Five different conditions, namely, no-load condition, sudden load-torque changes, system parameter uncertainty, sudden phase interruption, and the impact of noise have been studied. The proposed method was found to meet the high-speed response with the tracking error of ±2.23% for the tracking reference trajectory and tracking error of ±2.5% under constant load-torque disturbance. The test results were compared with two benchmark controllers for the verification of the effectiveness of the proposed controller. Simulation results showed the proposed method providing an adaptive and precise speed response. Therefore, it is suitable for non-linear and uncertain applications.
Keywords
Introduction
Most of the mechanical systems and industrial plants make extensive use of proportional–integral–derivative (PID) controllers due to this simple structure. However, they suffer from problems arising from the purpose of vague and non-linear systems, systems that suffer from uncertainties, and highly complex systems (Acarnley, 2002). The open-loop control method utilizes a train of pulses generated by a power driver, in which speed and shaft position information has not been used. This method introduces large peak overshoot, torque ripple problems, and resonance that degrade the performance of the system (Daouda et al., 2017). Therefore, high precision applications need a closed-loop method (Butcher et al., 2014). The performance of the non-linear systems was effectively improved by the use of various feedback control methods. For example, the linearization feedback method was used in the linearization of the dynamics of the non-linear system around its operating point (Le et al., 2017). Although this method is better than the open-loop scheme, it endures from the lack of adaptation for different operating points. This non-adaptive problem was solved by the use of a self-tuning adaptive strategy (Chellaswamy et al., 2017). This approach is not suitable for practical implementation due to the requirement of a large amount of floating-point computations. A microstepping-based closed-loop scheme has been introduced by Gaan et al. (2018) for avoiding vibrations at high-speed operation and resonance at low speeds.
Fuzzy logic, convolutional neural network (CNN), and learning techniques have been used for the control of non-linear systems. These techniques provide the ability to handle uncertainty and learning various behaviors of the non-linear systems (Prasanth and Pavalarajan, 2019; Tozune et al., 2007). The improvement in tracking characteristics and the transient dynamics of the system offer a reduction in disturbance and torque ripples (Rubaai and Kotaru, 2001). El-Nagar and El-Bardini (2017) have proposed a type-2 fuzzy controller based on the rule-based system. General schemes were introduced to design a proportional–integral (PI) and proportional–derivative (PD) controllers for the achievement of the desired transient response. Kumbasar and Hagras (2014) proposed a bang-big crunch optimization method for optimization of the predecessor parameters of the membership function (MF). The researchers applied ant-colony optimizations, genetic algorithm, and particle swarm optimization (PSO) for designing optimal type-2 fuzzy logic controllers (Castillo and Melin, 2012). Cortes-Rios et al. (2014) have proposed evolutionary algorithms for tuning the type-1 or type-2 fuzzy systems. Lyapunov’s theory-based adaptive type-2 fuzzy logic controller was proposed for increase in the performance of a permanent magnet synchronous machine (Chaoui et al., 2017). Bernal et al. (2019) have suggested galactic swarm optimization for increasing the performance of an autonomous mobile robot.
Optimization and learning techniques find extensive use in intelligent controllers for improving the performance of the system under environmental disturbance and uncertainties. Various optimization techniques such as evolutionary algorithm (Peignier et al., 2019), genetic algorithm (Wang et al., 2019), ant-colony optimization (Dorigo and Stützle, 2019), PSO (Ding et al., 2014), and other optimization techniques (Kohila et al., 2019) were combined with fuzzy logic systems. In particular, the Takagi–Sugeno–Kang (TSK) type fuzzy logic systems were integrated with these optimization techniques. Alternatively, model-free techniques were found to work in the principle of reward and the punishment besides the notion of knowledge from the gathered experience. Reinforcement learning algorithm (RLA) was used for getting a good control in non-linear dynamic systems (Nagayoshi et al., 2012). RLA is a key strategy used to learn the choice of an optimal action to build an autonomous system. A neural network was used for representation of the critical element; the adaption was done through the reward function (Liang et al., 2020). RLA has another element called actor that carries out approximation of the control policy of the system. The actor–critic learning method has a separate memory structure. An artificial neural network is used for the implementation of the actor and critic elements. The author did do any testing with the algorithm under sudden disturbance and uncertainty conditions. Performance of a model-free intelligent controller based on an emotional learning algorithm has been proposed by Yazdani et al. (2018). The experimental results showed the capability for handling uncertainty under different conditions of the hybrid stepper motor (HSM). A 16-bit microcontroller used for the development of a fuzzy logic controller for four-phase variable reluctance stepper motor showed distinct advantages over conventional control methods. Effective arrangement of the inference rule and the MF was seen providing satisfactory results. Despite providing good result, it suffered due to oscillation and overshoot (Auday et al., 2018).
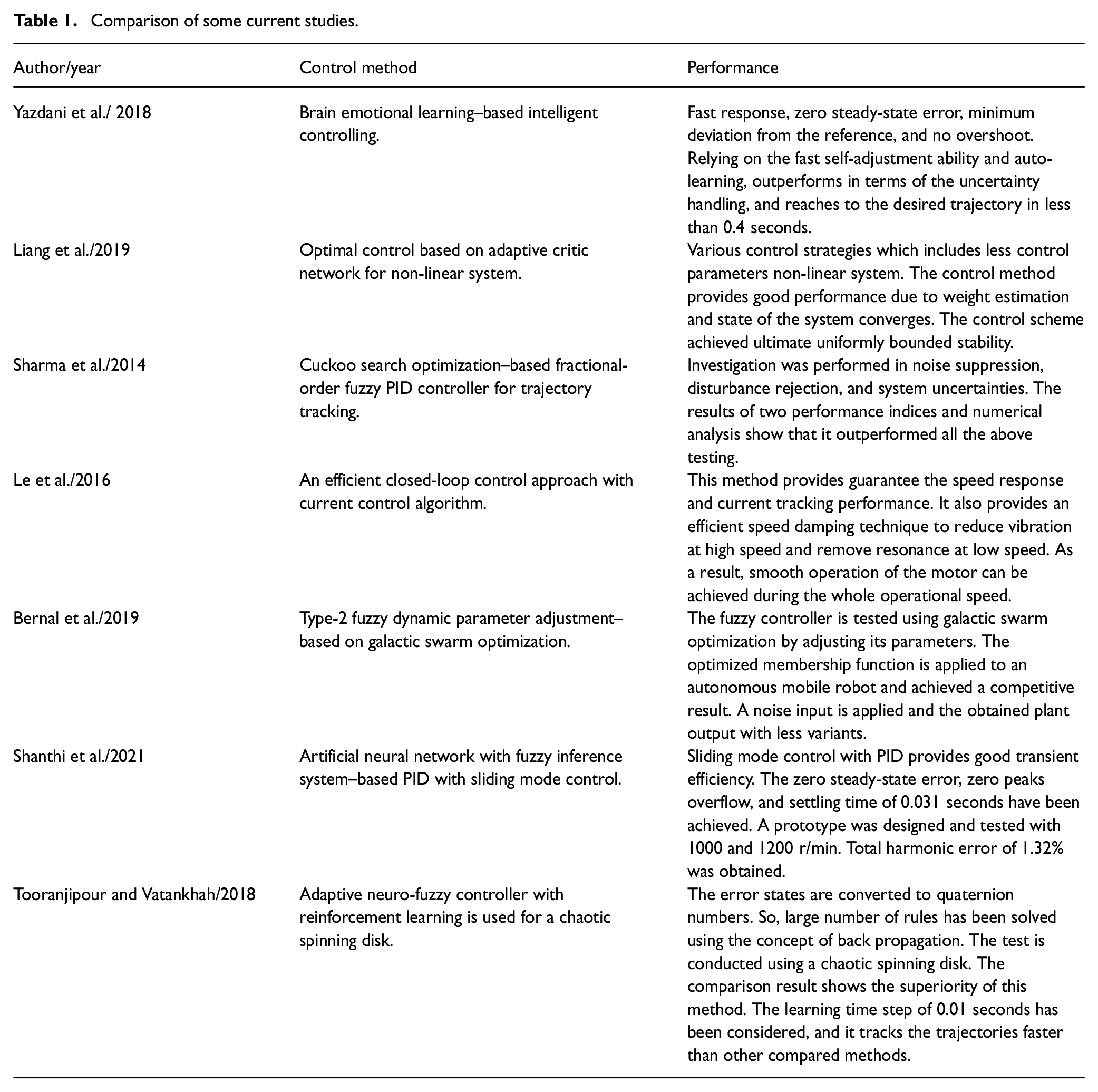
Buşoniu et al. (2018) comprehensively addressed the stability of the controller using RLA method. Control actions and continuous states of RLA, feasible solution in control applications were studied. The neural network with gradient-based scheme used for stability of the controller is still an open question. RLA-based adaptive actor–critic fuzzy controller utilized the Lyapunov stability criterion instead of gradient descent algorithm. The adaptation rule was derived using the Lyapunov stability criterion (Khater et al., 2018). A novel control configuration developed by Na and Herrmann used adaptive dynamic programming. The optimal value function of the Hamilton–Jacobi–Bellman equation was approximated using the critic neural network. An adaptation law was used (Na and Herrmann, 2014) for a guarantee of stability of the CNN. Neurofuzzy controller based on adaptive critic network has been proposed by Tooranjipour and Vatankhah (2018). A small number of fuzzy rules were utilized without compromising the response time. A lateral vibration of the spinning disk (chaotic system) was used in the study of the performance of the controller. The authors believed the adaptation law utilized in the critic network needs further improvement. They limited the parameter adaptation process and reduced the intelligence on a predefined path. The Lyapunov function provides the solution for maintain stability. The controllers used in different applications should provide a feasible solution (Shanthi et al., 2021). A summary of current studies related to the proposed work is listed in Table 1.
Comparison of some current studies.
In this study, actor–critic learning-based Takagi–Sugeno–Kang fuzzy controller (AC-TSKFC)–based robust and high precision controller was developed for non-linear and uncertainty systems. AC-TSKFC consists of a flexible structure that also provides efficient computation. The newness of AC-TSKFC includes (1) online tuning of the controller enabled by the critic network based on the reward function, because it consists of fewer learning parameters and (2) its flexibility helped combination of both the TSK fuzzy controller and the advantage of RLA for the reduction of the effect of external disturbances and system uncertainties. A study of the performance of the proposed AC-TSKFC controller was made under various operating conditions such as no-load condition, sudden load-torque changes, system parameter uncertainty, sudden phase interruption, and impact of noise. A comparison was performed with two other benchmark controllers, namely, variable reluctance stepper motor using fuzzy logic controller (VRSM-FC) for the demonstration of the robustness and effectiveness of the proposed AC-TSKFC (Sang-Hoon and In-Joong, 2007) and intelligent control of hybrid stepper motor (IHSM) under uncertainties (Zhang et al., 2020) under uncertainties and environmental disturbance as well as validating the AC-TSKFC transient and steady-state responses. The major contributions of the AC-TSKFC are as follows:
Actor and critic-based AC-TSKFC proposed for PI and D system.
Updation of actor parameters using a control function and any change in error depending on the reward function.
Updation of critic weight using the Lyapunov criterion and a study of the stability analysis of the Lyapunov criterion for the choice of the condition of the rate of learning.
A study of the performance of AC-TSKFC under system parameter uncertainty, sudden load-torque changes, sudden phase interruption, and impact of noise.
The remaining part of this paper is structured as follows. Section “AC-TSKFC fuzzy controller” describes the AC-TSKFC fuzzy controller. The actor–critic learning method is described in section “Proposed parameter learning”. Simulation results for the proposed AC-TSKFC controller under five different conditions are provided in section “Simulation results,” and the conclusion is presented in section “Conclusion.”
AC-TSKFC fuzzy controller
This section describes the PI and D controller–based AC-TSKFC systems. The fuzzy controller consists of two major parts, namely, the PI fuzzy controller and the D controller. Figure 1 is the block diagram of the AC-TSKFC controller, which shows e(k) (error signal) and δe(k) (change in error signal) as the two input variables; VPI + D(k) is the output variable and acts as the control signal. A scaling factor was used for normalizing the input variables. It can be expressed based on Khater et al. (2018) as


where
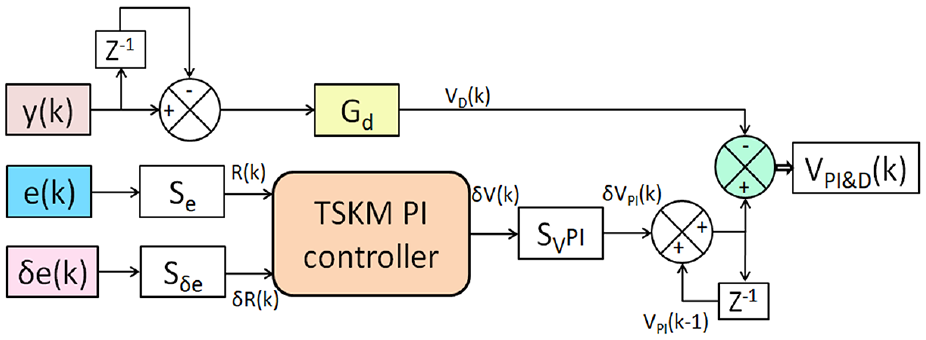
AC-TSKFC fuzzy controller including PI and D controller.
Fuzzification process
The Gaussian membership function (GMF) was used for carrying out the fuzzification process, done on the input variable p(k) can be expressed as

where

where
Inference and rule base
The rule for the AC-TSKFC fuzzy PI controller can be expressed as

where An and Dm are the fuzzy sets, n = 1,2,…, N, m = 1,2,…, M,

Defuzzification process
The defuzzification process was done following the calculation of the output consequences for obtaining the crisp output. It can be expressed based on Sharma et al. (2014) as

After performing equation (7), the output of the AC-TSKFC fuzzy PI controller can be formulated as

The antecedent part of the kth rule is expressed as

The consequent part of the proposed AC-TSKFC is expressed as

where
Control signal estimation
The control signal, VPI&D(k) is applied to the non-linear system, was estimated based on Zhang et al. (2010) as


where GD(k) represents the derivative gain. Initially, the value of GD(k) is chosen randomly. During the process, it is updated automatically.
Proposed fuzzy adaptive actor-critic
The AC-TSKFC developed for the stepper motor utilized its speed error (SE) and the corresponding derivative as inputs. The fuzzy logic applied consisted of three MFs, namely, Positive (P), Zero (Z), and Negative (N). For more detailed information about stepper motors (step angle, direction of rotation, etc.), the reader can refer to Auday et al. (2018). There were seven rules utilized in the fuzzy rule base, the Gaussian and Sigmoid functions were used for the linguistic variables Z, P, and N, respectively. It can be expressed as


where c, σ, a, and b are the parameters of the curve inflection. The input, output, and control variables include the speed error (se), change in speed error (cse), the control output (k), and the corresponding linguistic variables are given in Table 2. The speed error is estimated by comparing the actual speed of the motor with the reference speed. The change in speed can be estimated as
Matrix table for the fuzzy rule.
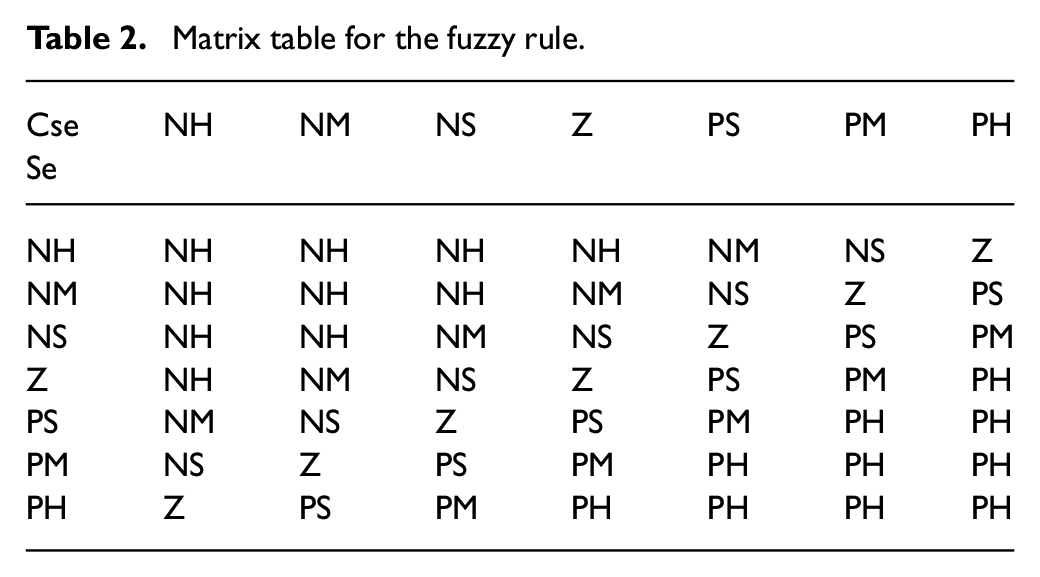
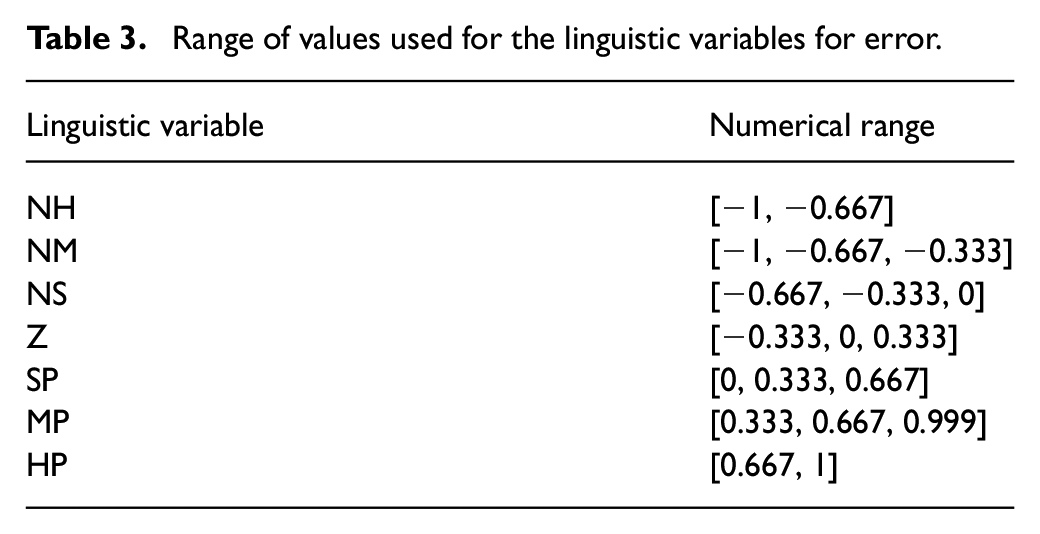
To increase the accuracy, the positive and negative sides of the error are divided into six small memberships. Besides, three memberships, namely, negative high (NH), negative medium (NM), and negative small (NS), are included. The MF can be written as MF = {NH, NM, NS, Z, PS, PM, PH}. The speed of the stepper motor is lower (in this study, 200 r/min), so the error and change of error range are low. The universe of discourse for input and output has been selected from −1 to 1. Furthermore, the values of the linguistic variables are chosen based on the previous literature referenced. The numerical range of values is given in Table 3.
Range of values used for the linguistic variables for error.
The critic plays a significant task in the proposed AC-TSKFC by tuning different parameters of neuro-fuzzy controller for the achievement of desired performance. In this study, the error in the speed of stepper motor and its derivatives have been chosen as candidate functions for the critic signal. The state of evaluation performed in critic was as follows: when SE and its derivatives are positive, did evaluation of poor performance of the system. However, if the SE is positive and its derivative is N, it evaluates the performance as satisfactory and waits for a better performance in the future. Nine rules have been employed in the two-input neuro-fuzzy controller is adaptive by updating the parameters as follows



Proposed parameter learning
Actor learning scheme
Figure 2 shows the block diagram of the actor–critic element of the proposed AC-TSKFC. In the actor, the three inputs e(k), δe(k), y(k), and the control signal, VPI&D(k) were the outputs. A cost function was defined for updating the actor parameters. The change in actor parameters was based on any change in the reward signal. The error can be expressed as

where X(k) represents the output function, and Vr(k) is the error between the objective and the change in the actor parameters. In this study, the success of the reinforcement signal is denoted by “0.” So, Vr(k) is set to “0.”
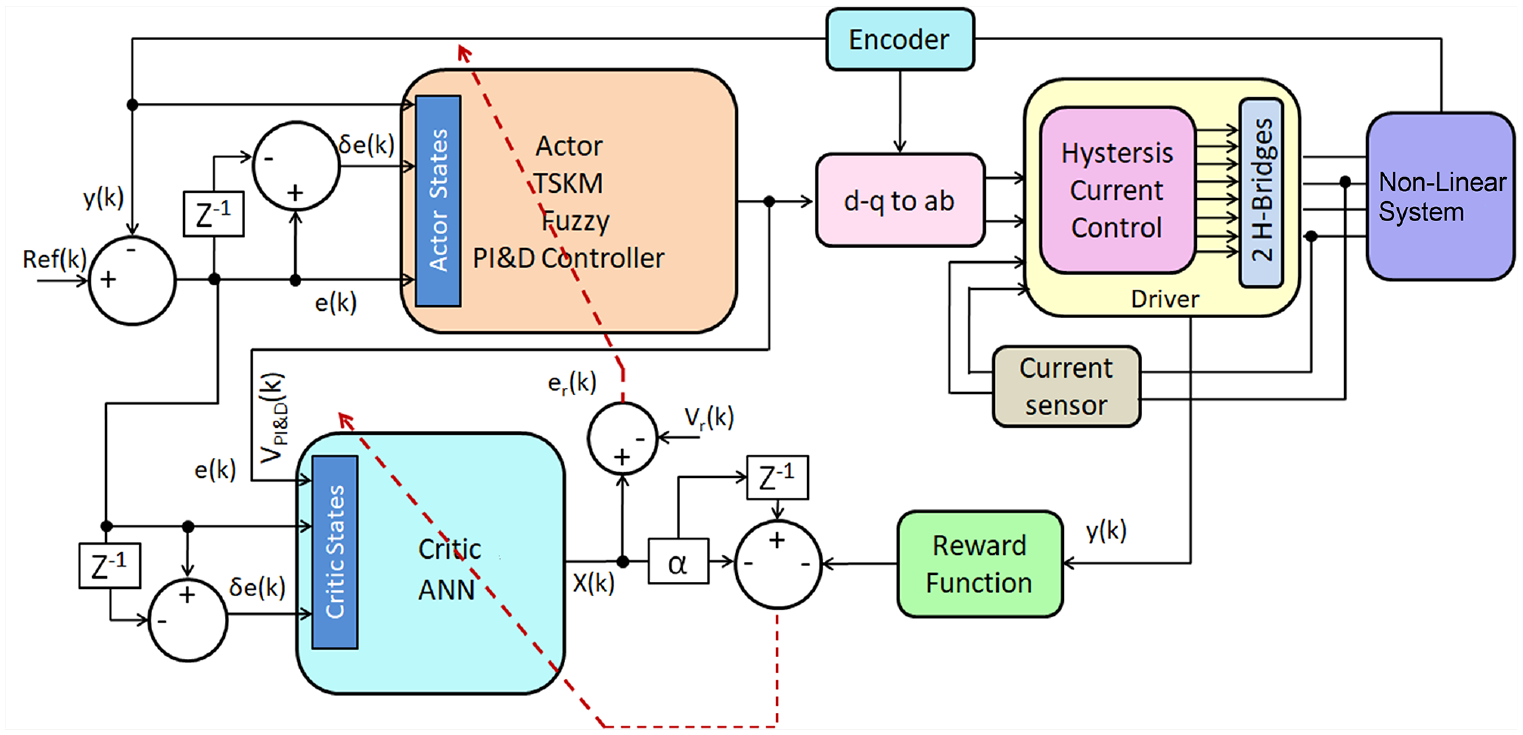
Schematic diagram of the reinforcement actor–critic learning structure for non-linear system.
Various conditions of the learning of the actor were determined using the Lyapunov theorem. Parameter learning done is anchored in the proposed cost function. The procedure for the actor learning parameters can be expressed as
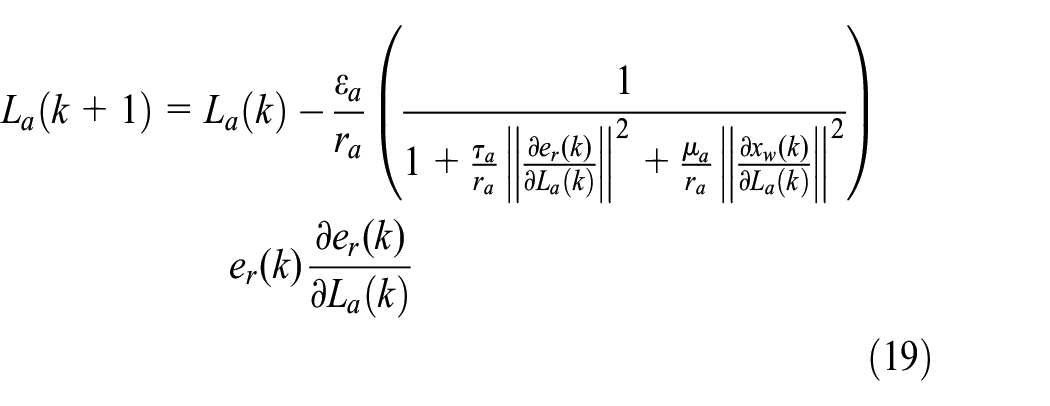
where εa, ra1, τa, and µa represent the learning rates, and er(k) is the error produced by the actor. The learning parameters of the actor can be represented as
The center of the first GMF was updated as follows (Khater et al., 2018)
where
The center of the second GMF was updated as follows
where
The standard deviation of the first antecedent parameters can be updated as follows
where


The standard deviation of the second antecedent parameters was updated as follows
where
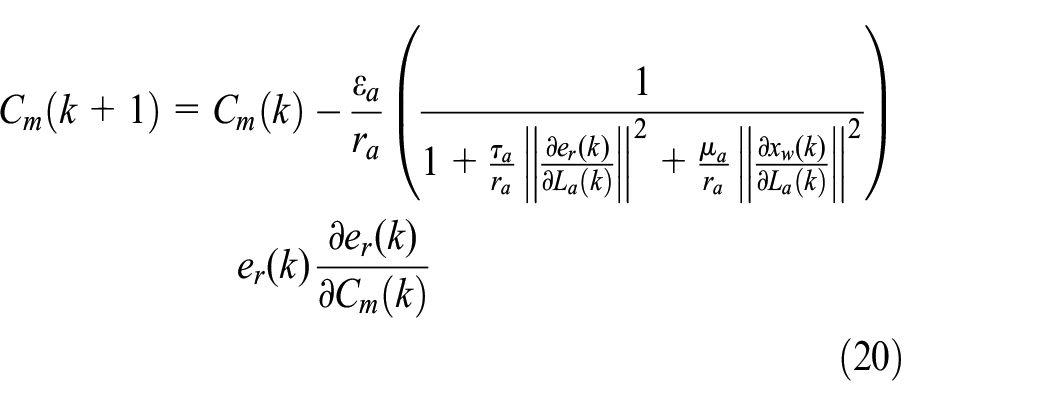
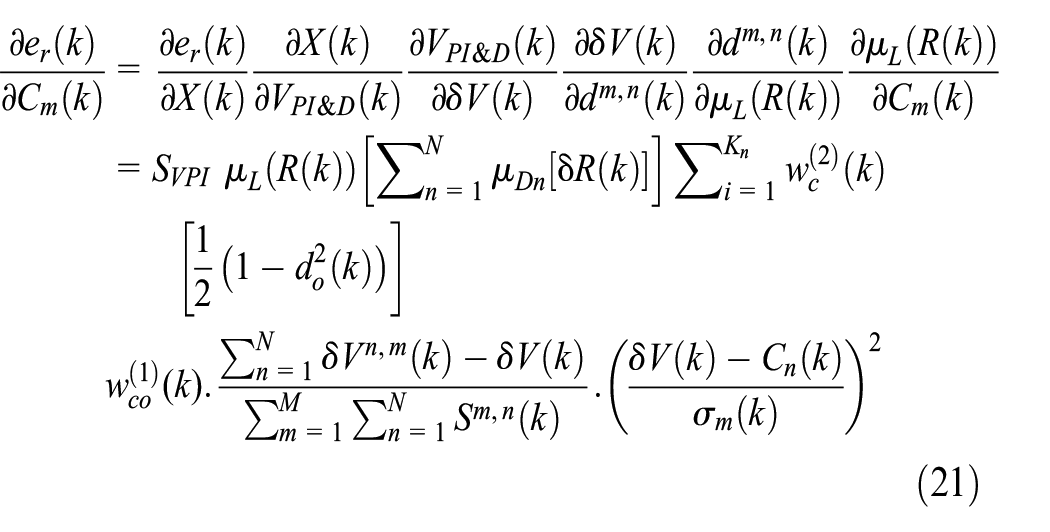
The first consequent coefficients can be updated as follows
where

The second consequent coefficients can be updated as follows
where
The derivative gain (Gd) is updated as follows
where
Critic network learning scheme
Figure 2 shows the block diagram of the proposed AC-TSKFC. The parameters of the proposed controller were tuned through the use of the reinforced learning method (RLM). During the operation, the RLM attained experience, adjusted the control policy, taking a series of decisions, and providing a high-performance output (Tooranjipour and Vatankhah, 2018). There were three inputs IN1, IN2, and IN3 and the critic output y(k). The output of the critic was calculated as

where Tn(k) is the nth hidden node input of the critic network. The output of the hidden node can be expressed as


where Nn is the total number of hidden nodes. The parameters of the critic network

The critic network parameters

Learning rate
Learning rate is one of the configurable hyperparameters of neural network used during network training. It has a small positive value (0 to 1) that controls quickly the model adapted to the problem (Subba Rao et al., 2021). The learning rate or step size is the amount of weights required for updation of the training process. A larger learning rate can result in faster convergence and a smaller number of training epochs, but the updates made during each epoch are larger, and the model's parameters may overshoot the optimal values. On the other hand, a smaller learning rate may require a larger number of training epochs to converge but results in smaller changes in the parameters during each update, allowing for finer adjustments and avoiding overshooting the optimal values. It is important that hyperparameter should be selected carefully in deep neural network. For maintaining the stability of the system, in this study
Simulation results
Extensive simulation tests were executed in MATLAB/Simulink under different operating conditions for the evaluation of the performance of the AC-TSKFC. The data sets used for conducting the experiment was taken from Goubeaud et al. (2020). Simulation was performed using MATLAB/Simulink software for the following cases: (1) no-load condition, (2) abrupt load-torque changes, (3) system parameter uncertainty, (4) sudden phase interruption and (5) impact of noise. The performance of the proposed AC-TSKFC was compared with that of two benchmark controllers: (1) VRSM-FC proposed by Auday et al. (2018) and (2) IHSM proposed by Yazdani et al. (2018). In this study, a study of the performance indices, namely, the root means square error (RMSE) and the integral absolute error (IAE) has been made (Ganesh Babu et al., 2020). These three indices can be defined as



where e(k) is the error signal, Ts is the number of iterations, and u(k) and u(k + 1) are the output signal of the controller at two consecutive sampling time. The simulation results and discussion of different test cases are as follows.
No-load condition
The no-load condition of AC-TSKFC was carried out considering the reference signal of 50 rad/s. Figure 3 shows the significant performance of AC-TSKFC demonstrated using several parameters, namely, rise time, overshoot, and steady-state error. The simulation result showed the proposed AC-TSKFC providing fast response, with no steady-state error and no overshoot. The proposed method was found to meet the high-speed response with the tracking error of ±2.23% for the tracking reference trajectory, indicating the superiority of the performance of the proposed method over VRSM-FC and IHSM. In this case, IHSM provides a slower response.
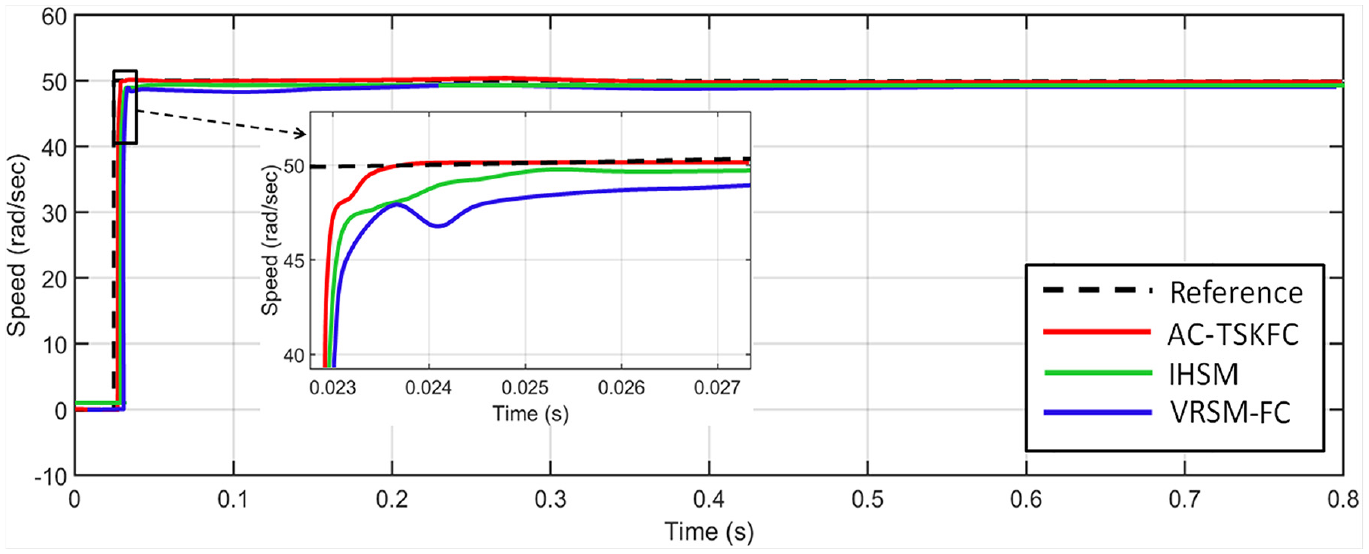
Response of AC-TSKFC, IHSM, and VRSM-FC under no-load condition.
System parameter uncertainty
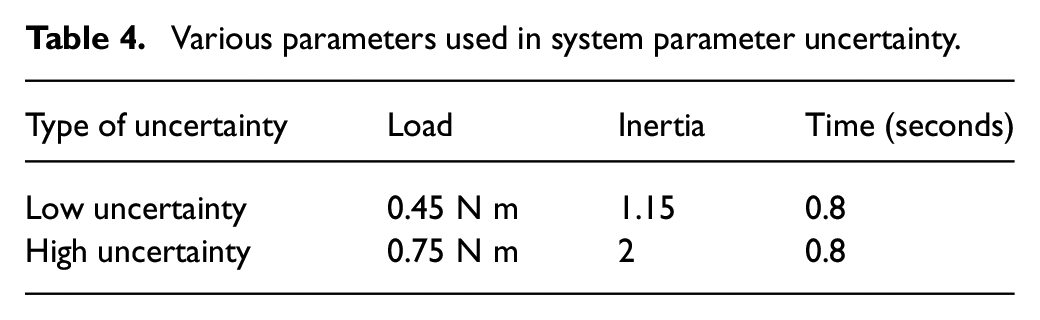
There are two different parameter variations of the motor used in the study of the robustness of the proposed AC-TSKFC. System uncertainty was created through changes in load and inertia. In this study, two different pullies with different diameters were used. In the first experiment, a small pulley was directly connected to the motor. A pulley with a larger diameter was joined to a smaller one using a belt arrangement used in the second experiment. Table 4 shows various inertia and load used in the study of the system parameter uncertainty. In the first case, (lower uncertainty conditions), a 0.45-N m load was applied. However, 25% inertia increased with the load of 0.75 N m was applied in the second case. Figures 4–6 show the response of the proposed AC-TSKFC and the two benchmark controllers VRSM-FC and IHSM under these two cases (low and high uncertainty).
Various parameters used in system parameter uncertainty.
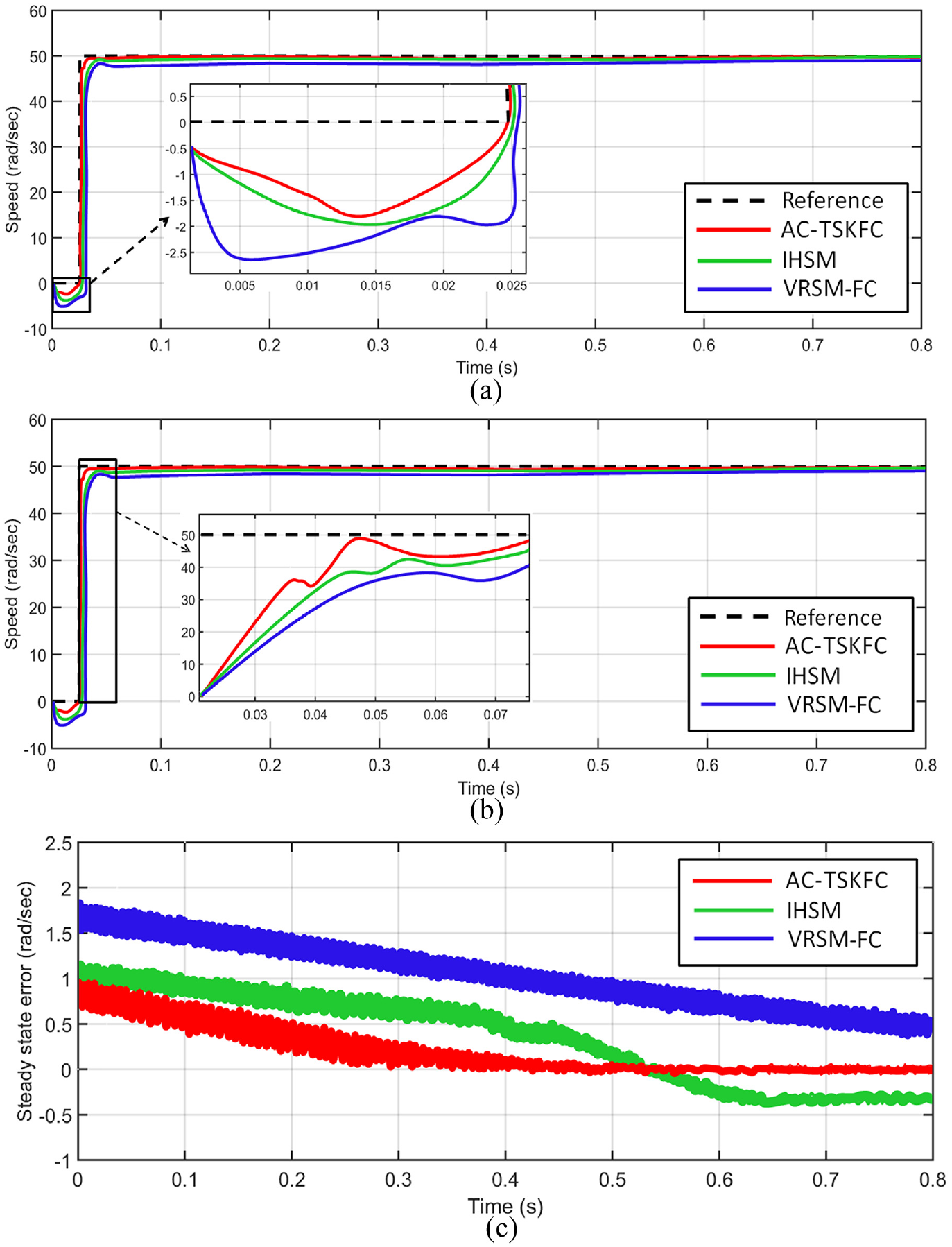
Tracking performance of AC-TSKFC, IHSM, and VRSM-FC under system parameter uncertainty (inertia = 1.15 J and load = 0.45 N m) (a) speed response with undershoot of the controller, (b) rise time, and (c) steady-state error.
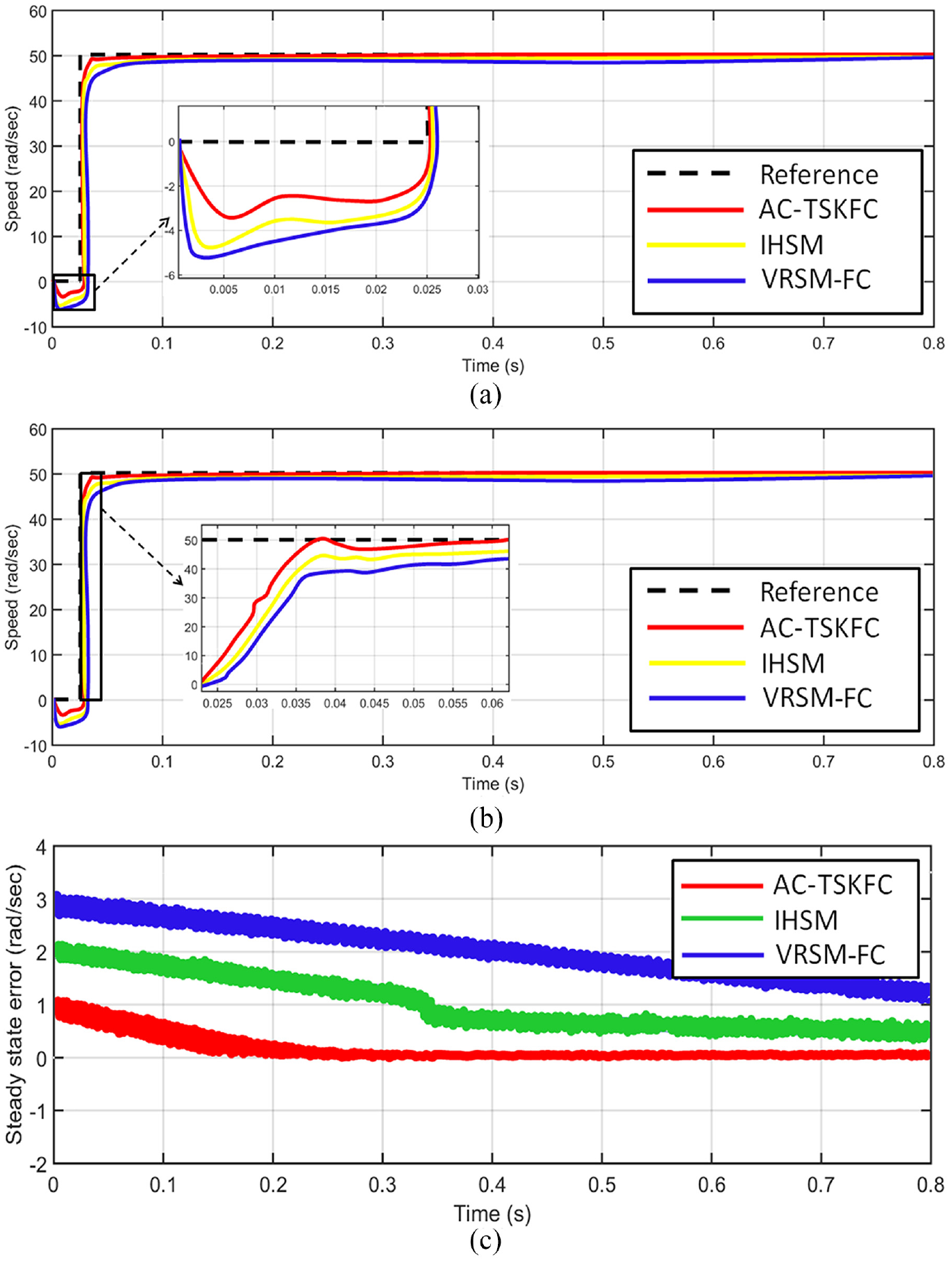
Tracking performance of AC-TSKFC, I, and VRSM-FC under system parameter uncertainty (inertia = 2 J and load = 0.75 N m) (a) speed response with undershoot of the controller, (b) rise time, and (c) steady-state error.
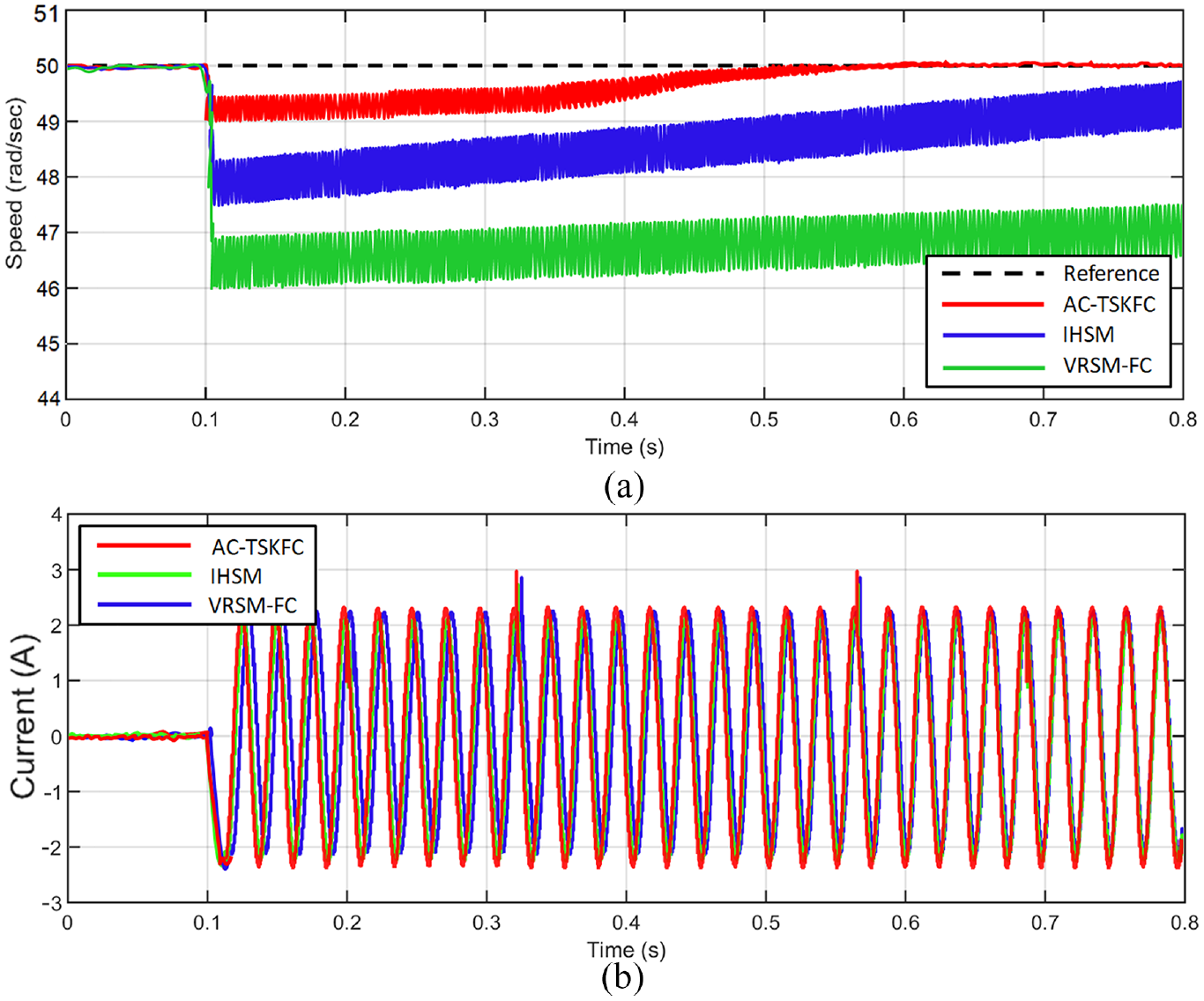
The speed and current responses of the AC-TSKFC, IHSM, and VRSM-FC controller under the impact of constant load-torque disturbance (case 1): (a) speed response and (b) phase current.
The addition of the new coupled system, created undershoot at the start of the speed trajectory response, is shown in Figure 4(a). It inferred that the trajectory tracking turned out to complicate due to the non-minimum phase nature of the coupled system. Figure 4(b) shows the proposed AC-TSKFC having less lag and sensitivity compared to ISC VRSM-FC and IHSM. Validation of self-adjustment and auto-learning ability of the AC-TSKFC was done in the rise time. The steady-state error for the proposed AC-TSKFC and two benchmark controller is shown in Figure 4(c). The superior performance of AC-TSKFC was validated by the quick recovery of speed response, which attains 50 rad/s speed, less than 0.25 seconds. It provides around zero steady-state error compared to the other two benchmark controllers under uncertainty condition.
The inertia of 2 J and the load of 0.75 N m were applied during the second case of the performance test. Figure 5 shows the speed response of AC-TSKFC under high uncertainty conditions. Figure 5(a) shows the speed trajectory response for the second experiment. An undershoot was seen at the starting of the speed trajectory response due to the uncertainty condition, showing a considerable impact on the performance of AC-TSKFC compared to IHSM and VRSM-FC controllers. Figure 5(b) shows the performance of the proposed AC-TSKFC in terms of rising time. The result showed the proposed AC-TSKFC providing a smaller rise time than the other two benchmark controllers. The steady-state error of AC-TSKFC was found to be superior compared to other counterparts is shown in Figure 5(c). Furthermore, IHSM has a lack of adaptability due to its rigid structure.
Sudden load-torque changes
This section deals with the performance of AC-TSKFC in maintaining stability and disturbance handling. There are three forms of sudden changes, namely, (1) stable, (2) increment in the load torque, and (3) decrement in the load torque has applied. At the outset, a load torque of 0.65 N m was applied at 0.1 seconds followed by the application of a sudden change from 0.65 to 1.3 N m at 0.3 seconds. Then, the load torque was reduced from 1.3 to 0.65 N m at 0.7 seconds. The load torque of 0.65 N m and the performance of the proposed AC-TSKFC and two other benchmark controllers in the first experiment are shown in Figure 6. Figure 6(a) shows the proposed AC-TSKFC as affected little under constant load-torque disturbance. The deviation of 1.5 rad/s was obtained at the final value of the reference trajectory. In contrast, the adaptation law used in AC-TSKFC corrected the deviation, as less than 1 rad/s, and as a result, improvement in the performance. This indicated the AC-TSKFC meeting the tracking error of ±2.5% under constant load-torque disturbance. Compared to other benchmark controllers, the proposed AC-TSKFC was seen providing a good speed response, with no extra phase current, and more robust.
The speed response and the phase current of the stepper motor for the proposed AC-TSKFC and two other benchmark controllers under incremental load change are shown in Figure 7(a) and (b). Compared to the response to the previous scenario, it provided a larger overwhelming in the two-speed changes and produces ripple. However, the impact of the phase current of the motor was seen as twice at 0.3 seconds. As a result, the drive system required a higher inverter rating. The AC-TSKFC maintained excellent stability even in this extreme condition and managed the load torque under two-speed changes. The critic network was quickly adapted; as a result, the tracking error of AC-TSKFC was smaller than 5%. The performance of the proposed AC-TSKFC was robust, whereas contributions to the error made by VRSM-FC and IHSM were seen as 10.63% and 12.75%, respectively. Compared to the auto-learning capacity of the proposed AC-TSKFC with VRSM-FC, was slower due to the use of the multi-layer structure.
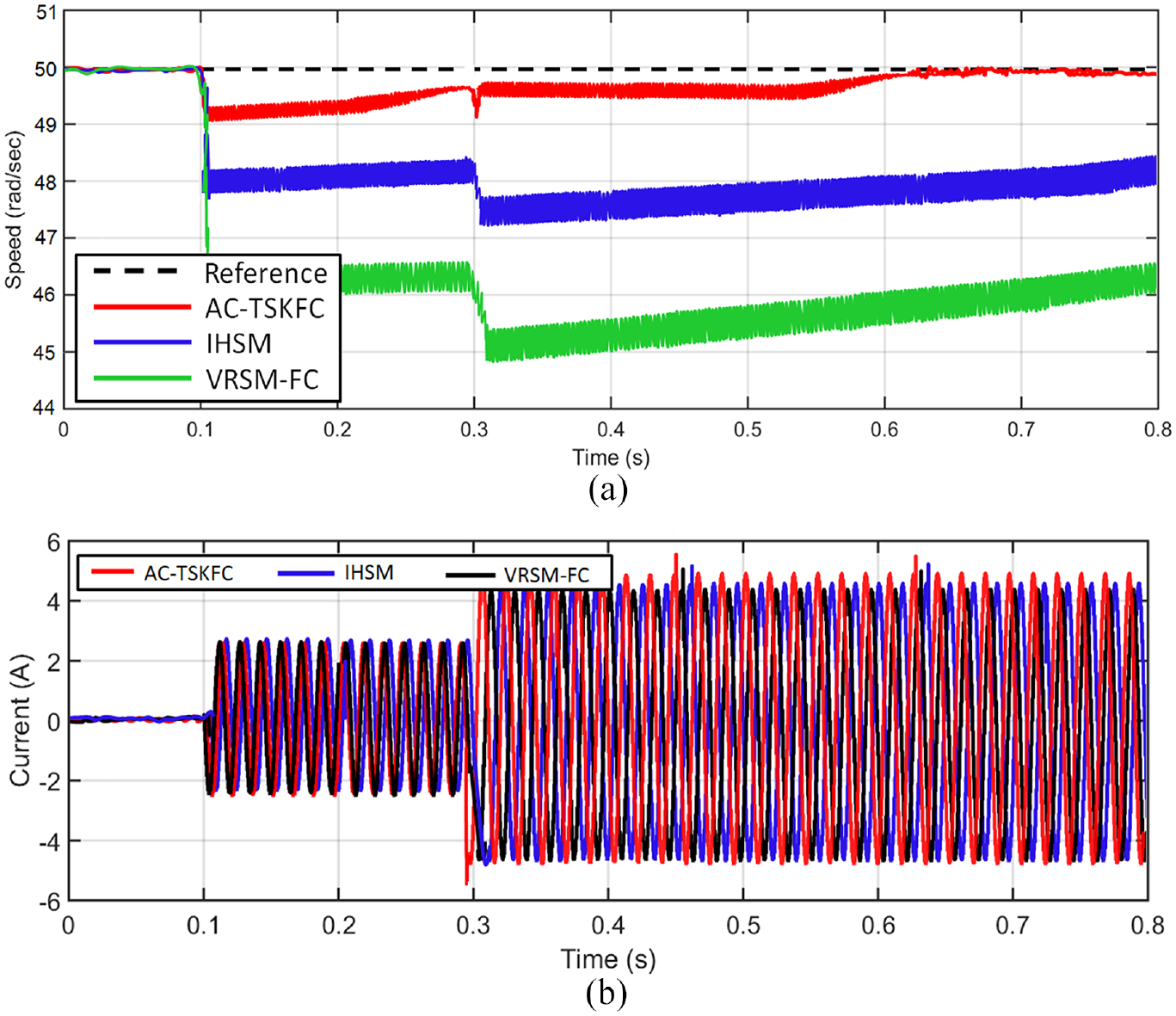
The speed and current responses of the AC-TSKFC, IHSM, and VRSM-FC controller under the impact of incremental load-torque disturbance (case 2): (a) speed response and (b) phase current.
Figure 8 shows the performance of the proposed AC-TSKFC and two other benchmark controllers under decrementation of the load change. The speed and current response of the proposed AC-TSKFC and two other benchmark controllers are shown in Figure 8(a) and (b), respectively. The result shows the proposed AC-TSKFC providing a smaller ripple in load changes compared to other benchmark controllers. In this case, the proposed AC-TSKFC provided a tracking error of 4.12% whereas VRSM-FC and IHSM provided 9.38% and 10.97% tracking error.
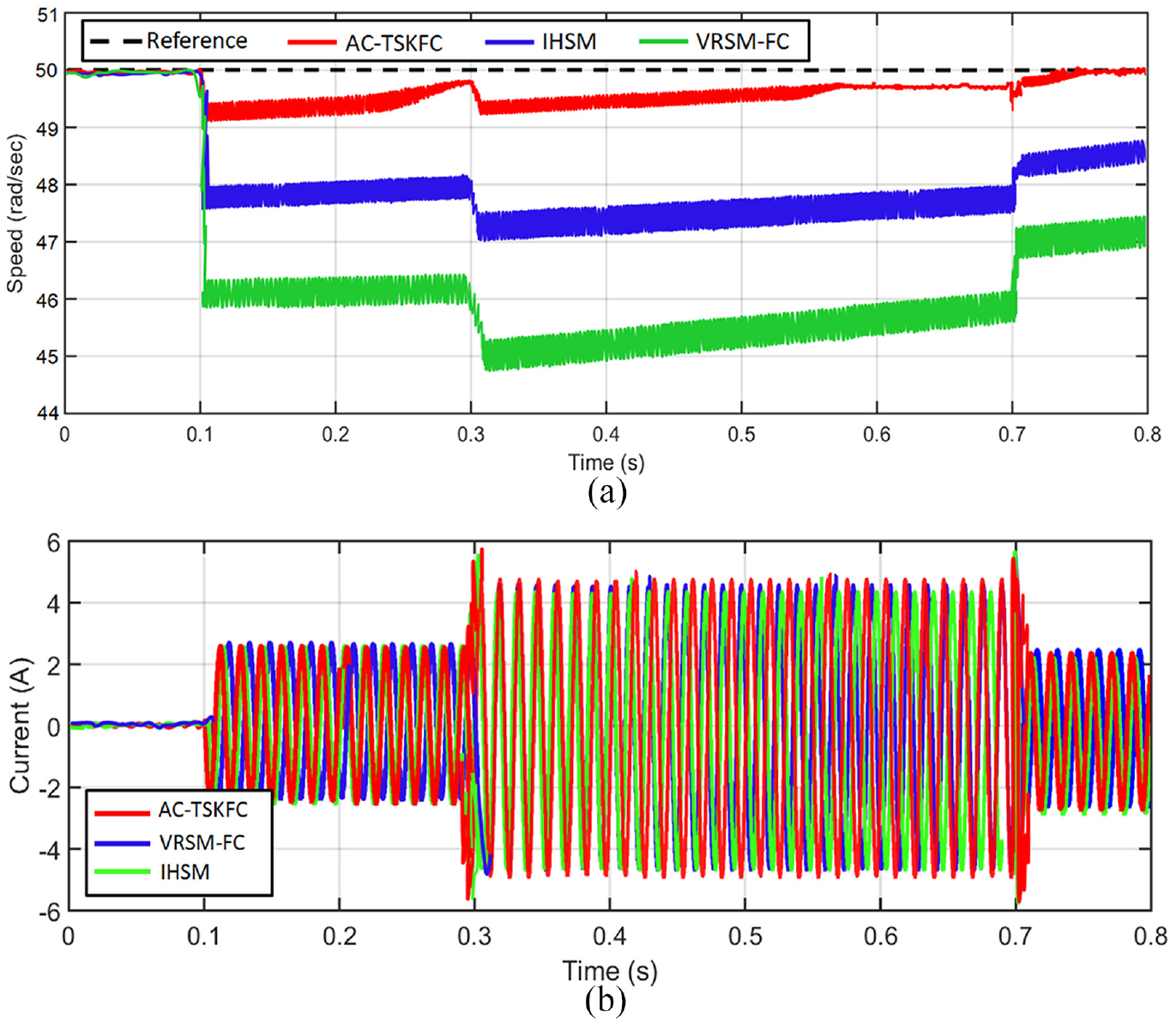
Performance of AC-TSKFC, IHSM, and VRSM-FC controller under sudden phase interruption (case: 3): (a) speed response and (b) phase current.
Sudden phase interruption
A sudden phase interruption condition was applied to the proposed AC-TSKFC controller and two other benchmark controllers for the investigation of its robustness. Generally, the open-circuit fault occurs in the stepper motor driver causes loss of field orientation, torque and current distortion, and torque pulsation of the motor. This condition was simulated at t = 0.15 seconds, and load torque of 0.45 N m under the speed trajectory of 50 rad/s. Figure 9 illustrates the response of sudden phase interruption for the proposed AC-TSKFC and two other benchmark controllers. This situation is seen increasing the ripple compared to the pre-fault condition. Figure 9 shows an increase in the speed ripples from 0.25 to 1.2 rad/s for the proposed AC-TSKFC, 1.52 rad/s for IHSM, and 2.12 rad/s for VRSM-FC under sudden phase interruption.
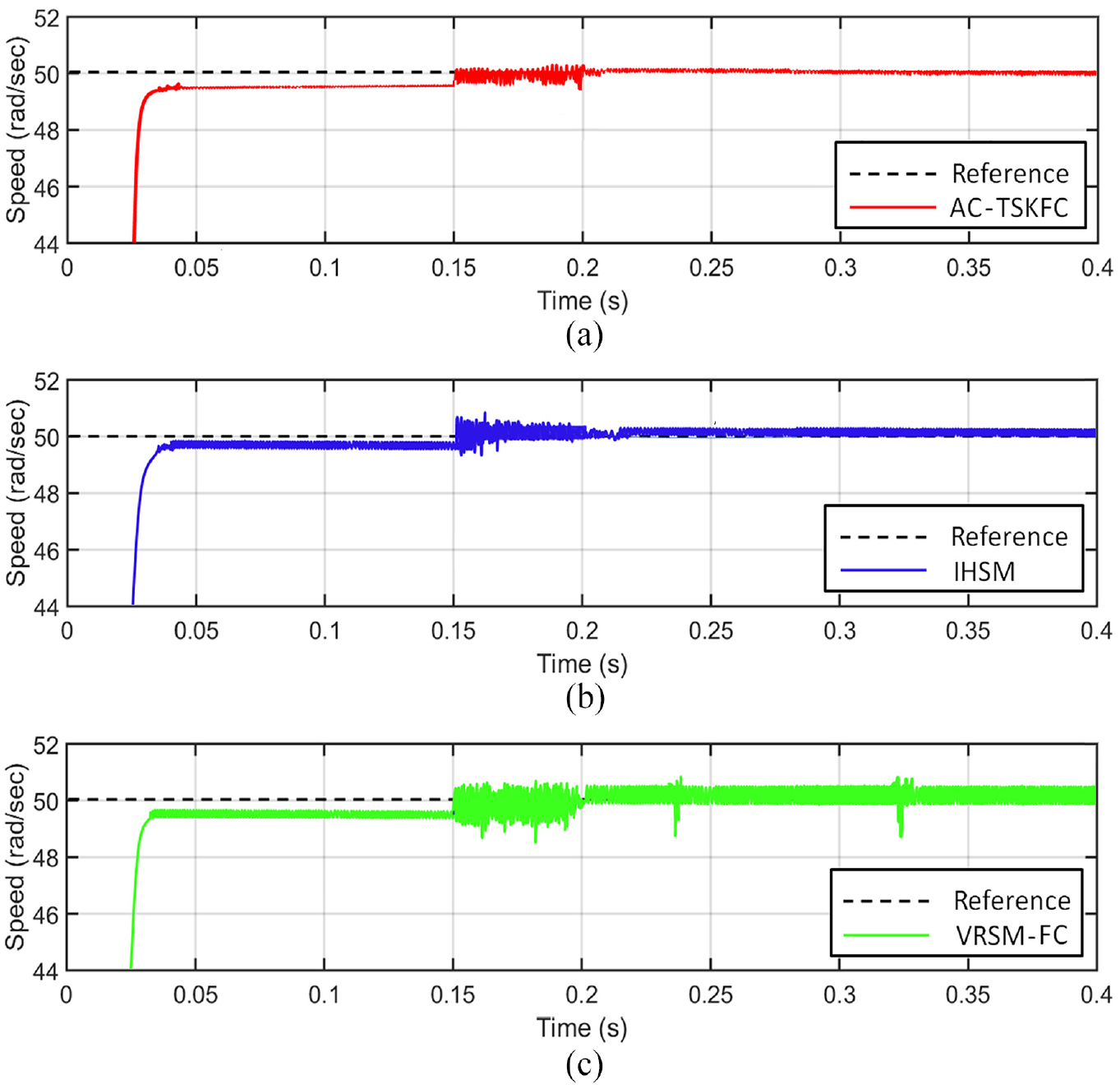
Performance of the proposed and two benchmark controllers under sudden phase interruption (a) AC-TSKFC, (b) IHSM, and(c) VRSM-FC.
Impact of noise
In this case, a study of the noise handling capacity of the proposed AC-TSKFC and two other benchmark controllers IHSM and VRSM-FC was made. There was a likelihood of noise arising due to the impact of environmental interruption affecting power supplies and power electronic devices, malfunctioning of measurement sensors, namely, tachometer and encoders interfaced with the system. Addition of Gaussian noise was made at t = 0.1 seconds up to t = 0.25 seconds, in the study of the influence of the noise. The response shown in Figure 10 indicates the proposed AC-TSKFC providing a satisfactory performance against noise; it can quickly return to the trajectory because of its adaptation law. The noise performance of AC-TSKFC was seen as superior to the other two benchmark controllers.
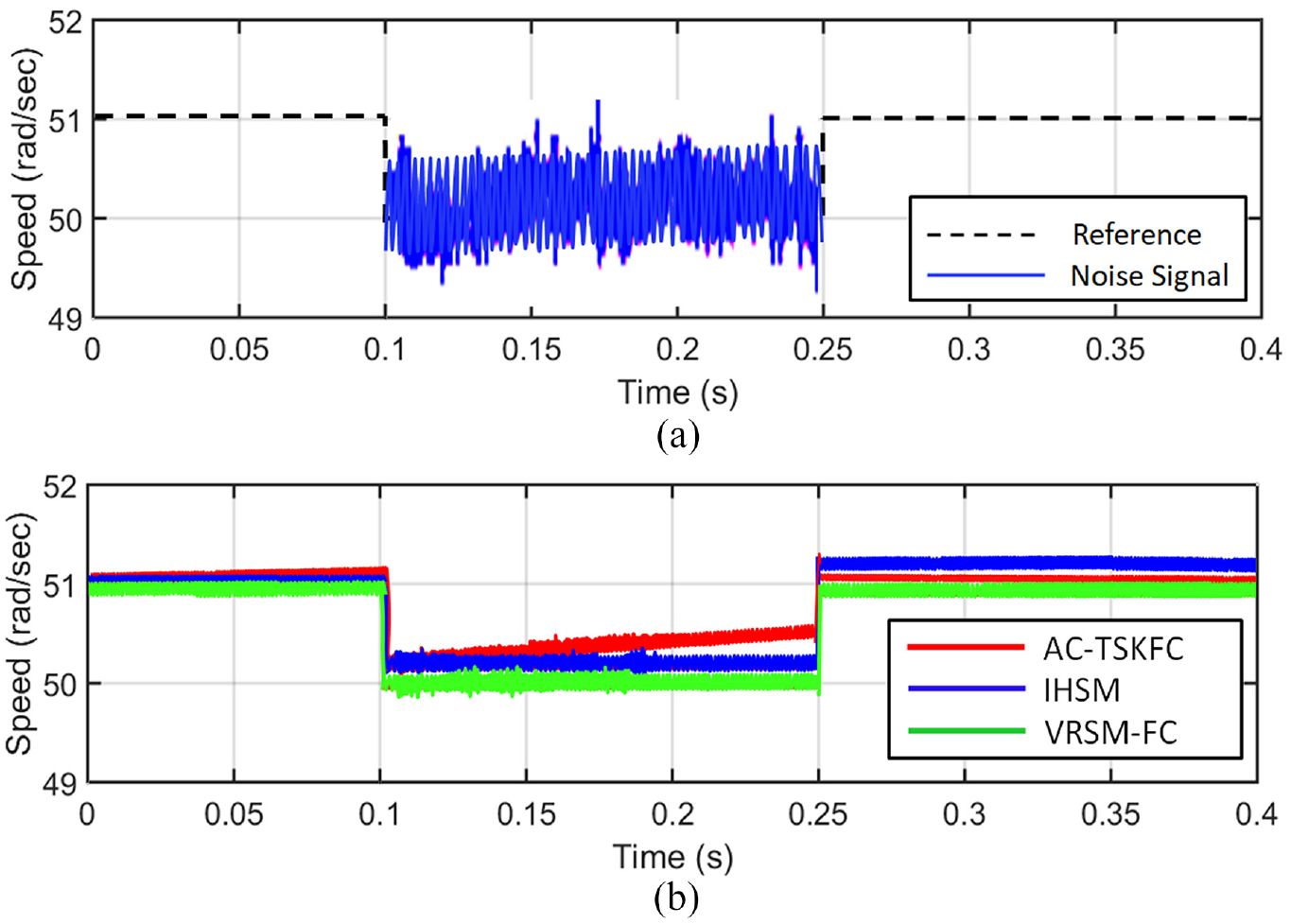
Noise performance of AC-TSKFC, IHSM, and VRSM-FC controller: (a) noise added with the reference signal and (b) speed response under noise condition.
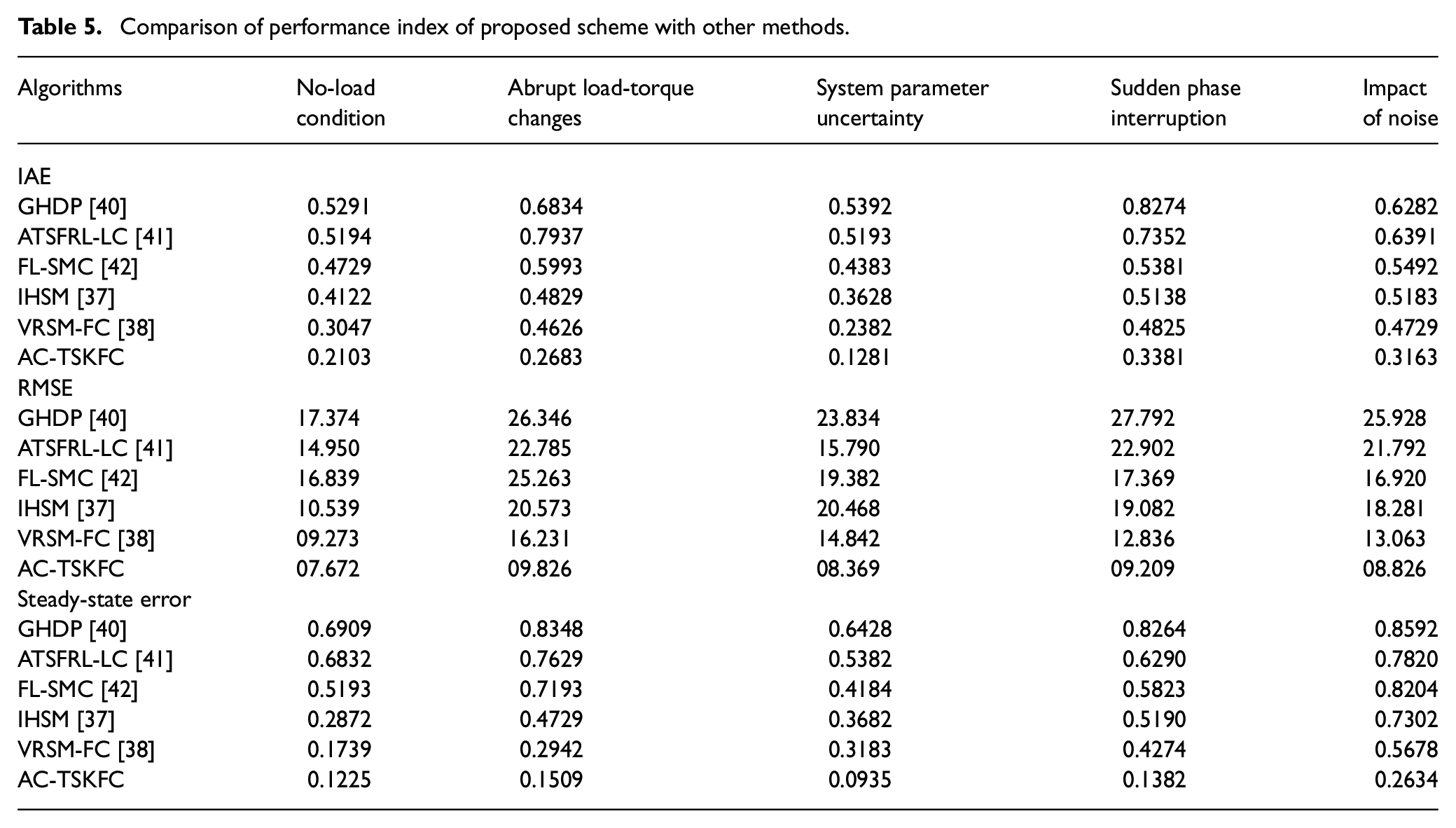
Table 5 makes a quantitative comparison of the performance of the AC-TSKFC with the benchmark controllers, namely, goal-representation heuristic dynamic programming (GHDP) [40], adaptive Takagi–Sugeno fuzzy system using reinforced learning based on Lyapunov criterion (ATSFRL-LC) [41], and fuzzy logic–based sliding mode controller (FL-SMC) [42] for all the cases described in this section. The result obtained from IAE, RMSE, and steady-state error for all the controllers are listed in Table 5. As numerically indicated in Table 5, the AC-TSKFC is seen outperforming the benchmark controllers in terms of no-load condition, abrupt load-torque changes, system parameter uncertainty, sudden phase interruption, and impact of noise. For example, in the no-load condition, the AC-TSKFC shows approximately 30.98%, 48.98%, 55.53%, 59.51%, and 60.25% better IAE compared to VRSM-FC, IHSM, FL-SMC, ATSFRL-LC, and GHDP, respectively. The RMSE under the no-load condition the AC-TSKFC is seen providing 17%, 27.20%, 54.43%, 48.68%, and 55.84% better compared to the VRSM-FC, IHSM, FL-SMC, ATSFRL-LC, and GHDP, respectively. However, the steady-state error under no-load condition, the AC-TSKFC shows approximately 29.55%, 57.36%, 76.41%, 82.06%, and 82.26% better than VRSM-FC, IHSM, FL-SMC, ATSFRL-LC, and GHDP, respectively.
Comparison of performance index of proposed scheme with other methods.
Robustness of the proposed controller
The following conditions have been considered in the examination of the robust performance of the proposed AC-TSKFC controller: (1) track the performance with two different inputs (step and trapezoidal input), (2) load-torque disturbance, and (3) gain scheduling under variations in load inertia.
The load torque of 2 N m and the inertia (nominal value) of 0.01 kg m2 were considered. The response obtained for the proposed controller is reported in Figure 11. The response of AC-TSKFC under step input is shown in Figure 11(a). The response shows an oscillation at the beginning and reached the steady state within 0.1 seconds. The proposed controller is seen providing good agreement with the desired reference position in a shorter time.
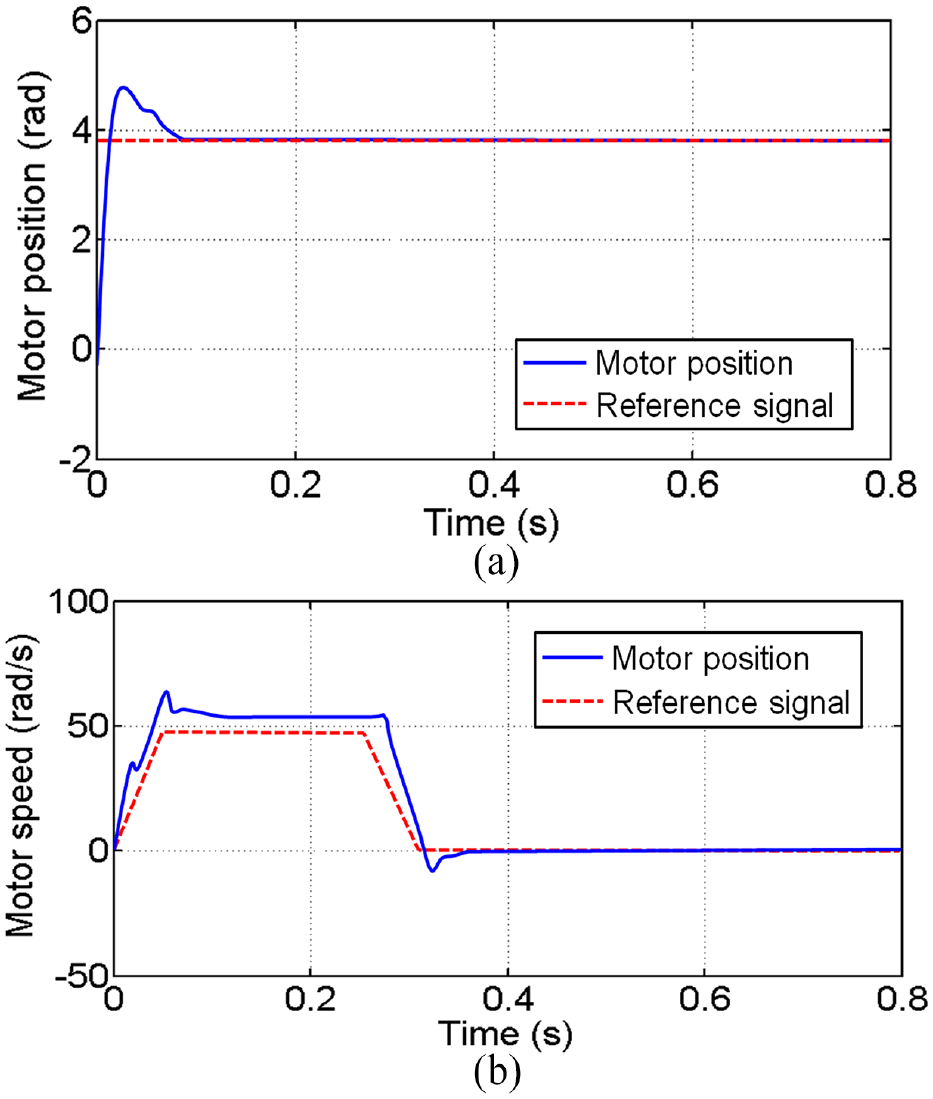
Response of the proposed AC-TSKFC subjected to different input signals (a) step input and (b) trapezoidal input.
A trapezoidal input was applied in the study of the robustness of the proposed controller, and the performance is shown in Figure 11(b). It shows the occurrence of a small overshoot in the start and the end of the transition time but within a shorter time for recovery of the targeted position. The robustness of the proposed AC-TSKFC is proved and confirmed under load-torque disturbance. The sudden load disturbance (0.2 N m) was applied at t = 0.05 seconds; the speed control of stepper motor at 63 rad/seconds for the proposed and the fuzzy controller is shown in Figure 12.
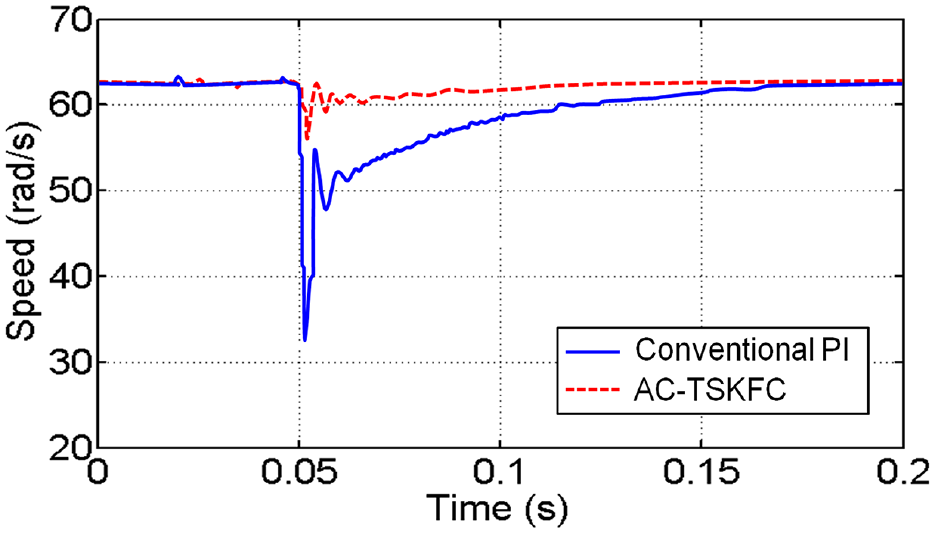
The speed response of the proposed AC-TSKFC and the fuzzy controller during sudden change of load disturbance (0.2 N m) at t = 0.05 seconds.
The speed dip is seen as low, recovering quickly for the proposed AC-TSKFC, which is not the case of fuzzy controller. The controller works under no-load condition up to t = 0.1 seconds and a small overshoot occurs when the load disturbance is applied. However, the fuzzy controller obtained the speed error of 8.2 rad/s whereas the proposed AC-TSKFC 4.5 rad/s and reached the steady state within 0.06 seconds. This happened due to the adjustment of the gains of the controller and minimizes the speed error. The next test for the robustness study of the proposed AC-TSKFC included gain scheduling under variations in load inertia. The response of different load inertia (J = 1/2Jo, J = Jo, and J = 2Jo) for fuzzy controller and the proposed AC-TSKFC are shown in Figure 13(a) and (b), respectively.
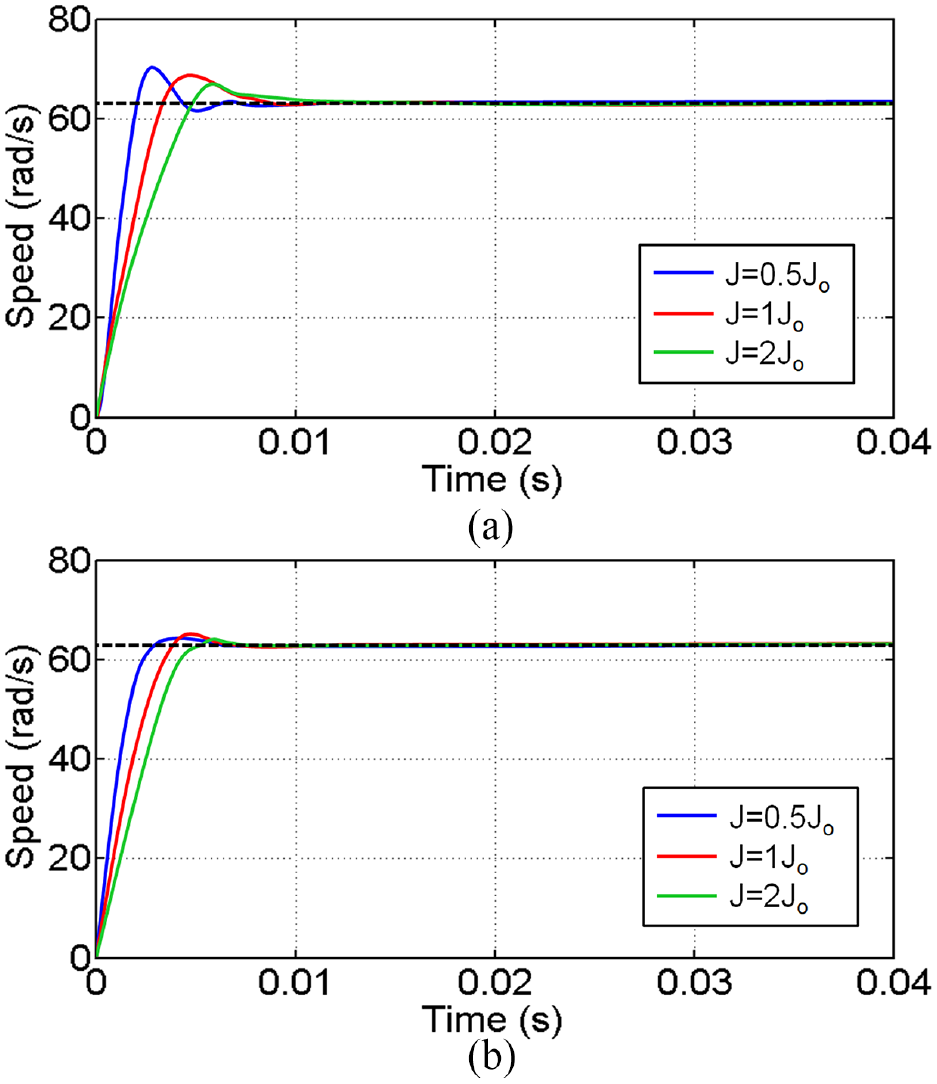
Response of gain scheduling under variations in load inertia (a) fuzzy controller and (b) proposed AC-TSKFC.
The speed response of the proposed AC-TSKFC was seen as better than fuzzy controller in terms of settling time and peak overshoot. But, the rise time of the fuzzy controller was somewhat better than the proposed AC-TSKFC. Therefore, the proposed AC-TSKFC provided robust performance for different input, sudden load disturbance, and gain scheduling under variations in load inertia. Due to its robustness, it can be used in various real-time applications such as three-dimensional (3D) printing equipment, gaming machines, robotics, CNC milling machines, temperature, pressure, and flow control in industrial applications.
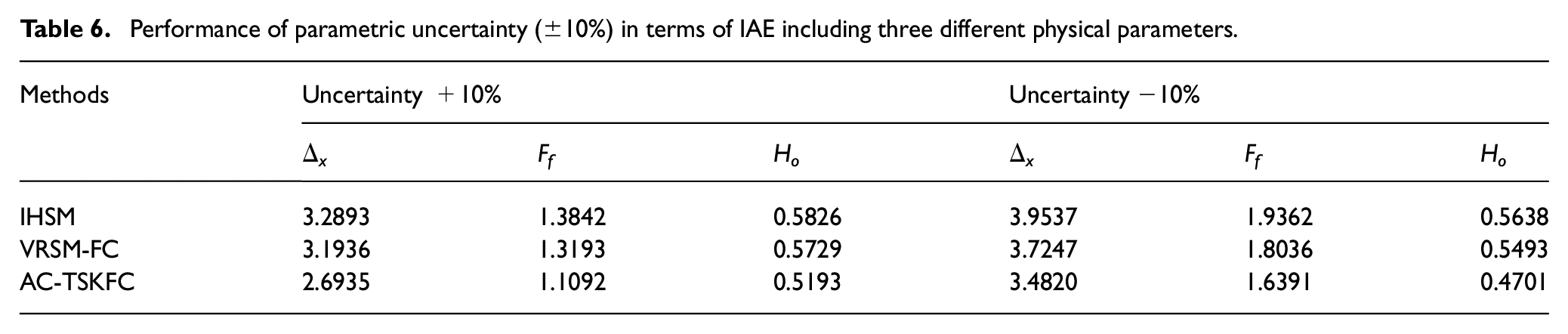
The robustness of the proposed AC-TSKFC has been studied in terms of IAE and compared with two other state-of-the-art methods (IHSM and VRSM-FC). The experiment was conducted by considering the parametric uncertainty of ±10%. Three different physical parameters (Δ x , Ff, and Ho) are taken in this problem, and one at a time is considered. The performance of the proposed AC-TSKFC for the uncertainty of +10% and −10% is given in Table 6. Table 6 shows that the performance of the proposed AC-TSKFC provided better results compared to IHSM and VRSM-FC.
Performance of parametric uncertainty (±10%) in terms of IAE including three different physical parameters.
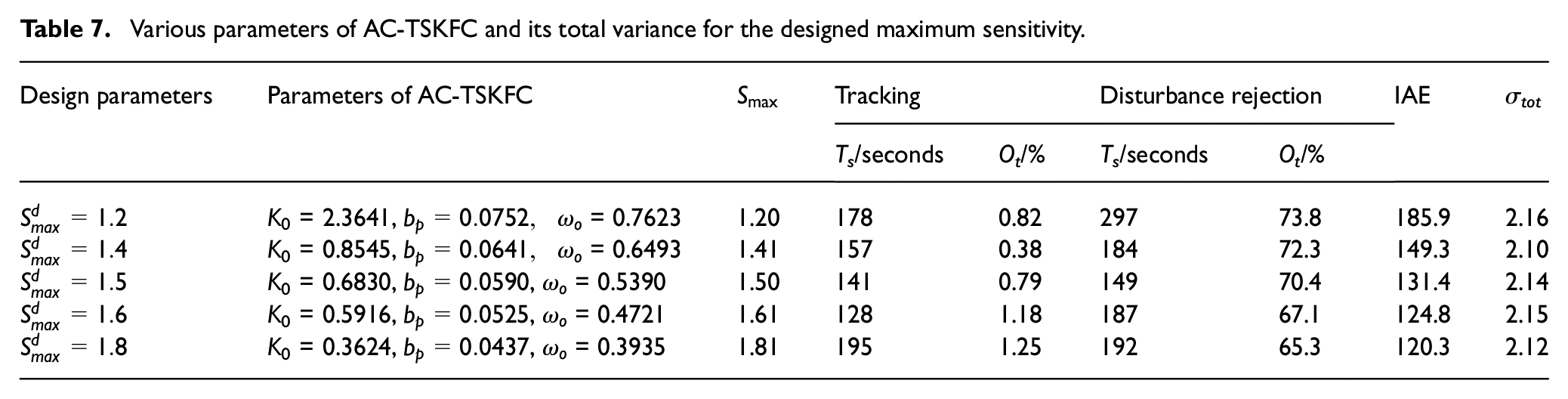
Using the example
Various parameters of AC-TSKFC and its total variance for the designed maximum sensitivity.
System performance
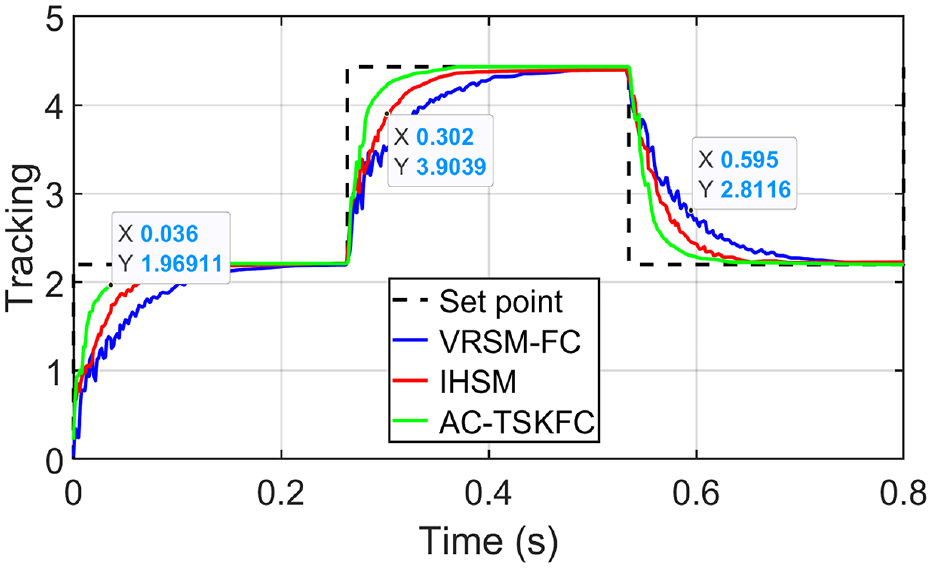
This section describes the performance of the proposed AC-TSKFC by tracking of rotor angle by applying uncertainty in system parameters (Figure 2). The experiment was conducted using R = 10 Ω, L = 0.0011 H, J = 0.0061 kg m2, β = 0.001 Nm s/rad, Km = 0.114 Nm/A, and Nr = 50. Initially, the rotor is moved to 4 degrees with the step size shown in Figure 14 (dashed lines). To demonstrate the efficacy of AC-TSKFC, uncertainty has been applied to the system parameters and its performance has been studied.
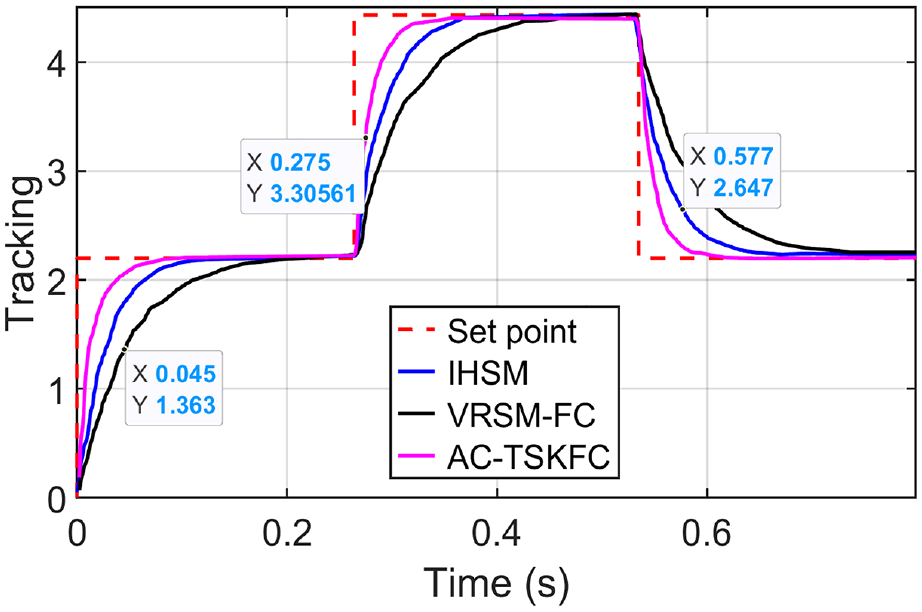
Performance of the proposed AC-TSKFC and three other controllers without uncertainty.
The performance of the proposed AC-TSKFC and two other controllers (IHSM and VRSM-FC) without applying uncertainty is shown in Figure 14. The proposed AC-TSKFC reaches the desired output faster than other controllers. Now, system parameter β is increased with 10% and random noise is introduced with the scale of 56 × 10−9 was applied, and the system performance is shown in Figure 14. It is observed from Figure 14 that the proposed AC-TSKFC performed better in tracking and provided a faster response than other controllers.
Similarly, the system parameter J is increased by 10%, including a random noise with the scale of 10−4 was applied, and the system performance is shown in Figure 15. It is observed from Figure 15 that the proposed AC-TSKFC reached the desired response more rapidly than other controllers. It is obvious that the AC-TSKFC has faster response and better tracking performance compared to other controllers.
Performance of the proposed AC-TSKFC and three other controllers for +10 increase in β.
The system performance is studied by changing multiple parameters, such as β and J which are varied +15% and +10%, respectively. The variations in the different parameters were applied at t = 7.8 seconds for all the controllers. The performance of the proposed AC-TSKFC controller and the other two controllers is shown in Figure 16. It should be noted that the proposed AC-TSKFC faster recovery response of 0.52 seconds, whereas other controllers (IHSM and VRSM-FC) took 1 and 1.34 seconds, respectively. Compared to all the cases, the proposed AC-TSKFC performed better than other controllers. Therefore, AC-TSKFC is more robust against uncertainties.
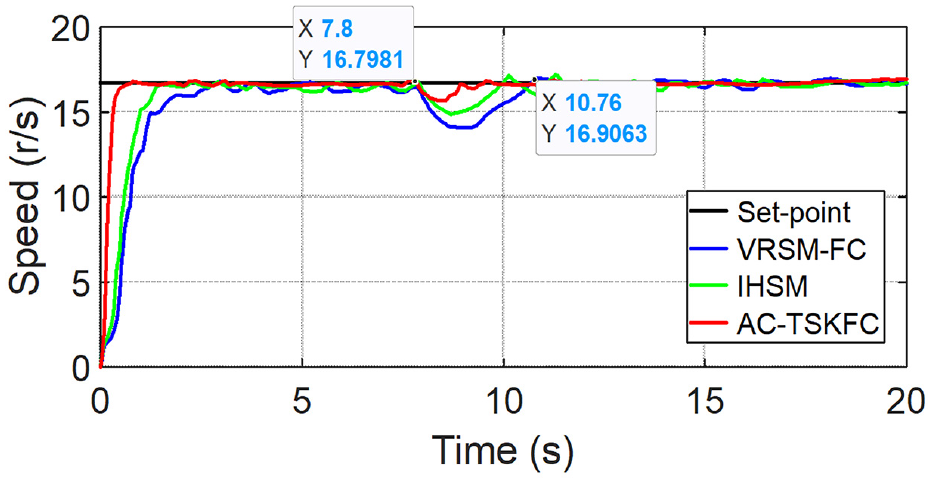
Performance of the proposed AC-TSKFC and three other controllers under multiple parameter variation at t = 9 seconds.
Conclusion
A robust speed trajectory tracking scheme was developed based on the AC-TSKFC for the HSM. Investigations of the proposed AC-TSKFC was done under five different conditions, namely, no-load condition, system parameter uncertainty, sudden load-torque changes, sudden phase interruption, and impact of noise. The simulation result showed the proposed AC-TSKFC achieving fast response, with no overshoot and no steady-state error, providing a smaller tracking error of ±2.23% compared to the reference trajectory. The performance of AC-TSKFC was evaluated against two other benchmark controllers (VRSM-FC and IHSM). The result showed the proposed AC-TSKFC providing a smaller ripple in load changes. In this case, the proposed AC-TSKFC provided a tracking error of 4.12% whereas VRSM-FC and IHSM provided 9.38% and 10.97% tracking error, respectively. The simulation results showed the superiority of AC-TSKFC in tracking and managing uncertainties. The success of the proposed controller was in the quick adaptation done by the critic network, as a result, maintaining good stability, reduction in the torque ripple fast, and management of load-torque disturbances. The computational time of the proposed scheme was a little higher than with other controllers. As against this, it provided better performance than other controllers under parameter uncertainties, set pint tracking, and environmental noise. In future work, the proposed method needs to be explored on a real-time target because of the resource demanding and computationally sensitive of the proposed AC-TSKFC controller. The suitability of the AC-TSKFC can be investigated using different industrial manipulators such as flexible-link robotic manipulators.
Footnotes
Appendix A
The adaptation law of the actor parameters is used to derive the quadratic criterion for the actor
where
To minimize
Therefore
Substitute equation (47) into
The error difference can be calculated as
The term
Now, equation (48) can be written as
According to equations (52) and (53),
After performing certain mathematical operations on equation (54), we get equation (55)
Appendix B
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.