
Abstract
Drill pipes used in coal mines operate under complex cyclic loads and harsh environments, which makes fatigue cracks prone to initiation and growth at threaded joints and significantly threatens operational safety. However, in situ ultrasonic crack evaluation is challenged by strong noise, unstable coupling conditions, and the scarcity of labeled fatigue-crack samples. To address these issues, this paper proposes an ultrasonic intelligent detection method for fatigue cracks in coal mine drill pipes that combines physical simulation and a Multiple Target Transfer Network (MTTN). First, a multi-physics finite element model of bulk-wave propagation in threaded drill pipes is established, and a large-scale simulation dataset is generated by embedding cracks with various depths and positions. This physically based dataset provides accurately labeled ultrasonic echo signals and forms the source domain. Then, a small set of measured ultrasonic signals acquired from 4137H steel drill pipe joints with machined U-shaped slots is used as the target domain. An MTTN with dual feature extractors, a domain classifier, a crack-state classifier, and a depth predictor is constructed to jointly perform crack state identification and crack-depth estimation. Through adversarial domain adaptation, the feature distributions of the simulation and real domains are aligned, so that the model trained mainly on simulated data can be effectively transferred to field-like conditions. Experimental results show that the proposed method achieves 100% accuracy in crack-state recognition and, compared with the best baseline network, reduces the mean squared error of crack-depth prediction by approximately 43% and the mean absolute error by about 28%, while improving coefficient of determination R2 to 0.9497 and PICP to 0.9452. These results demonstrate that the proposed framework provides accurate and reliable quantitative evaluation of drill pipe fatigue cracks under coal mine conditions.
Keywords
1. Introduction
The drill pipe is a critical component in drilling systems, with its joints primarily serving to connect pipes. Due to the complex and harsh operating conditions, these joints endure various stresses including tension, bending, vibration, torsion, and impact, which can easily induce crack initiation at the pipe’s interior or surface (Zhao et al., 2022). As cracks propagate and eventually lead to fracture failure, this poses significant economic losses to production operations. Drill pipe cracks typically occur at threaded connection joints, which are non-planar structures, making crack detection a persistent challenge in the field. Current non-destructive testing (NDT) methods for drill pipe defects primarily include magnetic particle testing (Zhang et al., 2023), ultrasonic testing (Lv et al., 2025), eddy current testing (Ge et al., 2023), radiographic testing (Guo et al., 2021), magnetic memory testing (Shi et al., 2021), and magnetic flux leakage testing (Long et al., 2022). While magnetic particle testing, eddy current testing, magnetic memory testing, and magnetic flux leakage testing offer significant advantages, their application in coal mine environments poses safety risks such as electrical sparks and localized overheating caused by high-power magnetizing devices, complex electromagnetic coils, and high-speed rotating mechanisms, which conflict with the intrinsic safety requirements of coal mining equipment. Unlike many conventional inspection methods, ultrasonic testing equipment can run with low voltage and very limited power. This allows the use of intrinsically safe circuit designs, so the instruments are better suited for large-scale deployment in underground workings where gas and coal dust explosions are a concern. As reported in Qiao et al. (2025), ultrasonic inspection with piezoelectric transducers can reveal not only surface flaws, but is also highly sensitive to volumetric defects located near the surface or within a certain depth range. By tuning parameters such as operating frequency, waveform, and incidence mode, the same system can be adapted to different parts of the drill pipe, including the tube body, tool joints, and threaded connections. The ultrasonic signals themselves contain multiple types of information—such as amplitude, phase, and propagation time—which can be processed with digital signal analysis and pattern recognition techniques to quantitatively evaluate defect size and to identify defect type. This richer set of diagnostic parameters supports early warning of drill pipe failures. Therefore, developing an intrinsically safe ultrasonic testing system for online monitoring of coal-mine drill pipes has important engineering value. In recent years, researchers have conducted extensive studies on crack non-destructive testing. Pyle et al. (2022) achieved online quantitative detection of pipeline cracks under uncertain conditions through plane-wave imaging and convolutional neural networks. Chen et al. (2022a) implemented crack detection in drill pipes by uniformly introducing crack regions at the root of the drill pipe threads and utilizing thermal imaging technology. Radzeya et al. Kirin et al. (2022) derived analytical expressions for surface cracks in oil pipelines, calculated stress factors for different cracks, and quantitatively assessed pipeline integrity using elastic fracture mechanics. To evaluate and prevent drill pipe failure, Peng et al. (2022) proposed a risk assessment method based on the Noisy-OR gate model and Bayesian network (BN). Compared to conventional structural components, coal mine drill pipes operate under complex loads and harsh media conditions, exhibiting high surface roughness and severe localized wear. Additionally, unstable coupling conditions and temperature-pressure fluctuations during downhole operations significantly increase noise components in ultrasonic echo signals (Chen et al., 2022b). In practical applications, the limited availability of physical crack samples and random distribution of defects, coupled with the high cost of preparing and calibrating crack specimens of varying depths and morphologies, make it challenging to obtain sufficiently large-scale, accurately labeled training samples for data-driven intelligent recognition models. Relying solely on a small amount of real data for deep learning model construction often leads to overfitting and insufficient generalization capabilities (Ma et al., 2025). To address this challenge, scholars have conducted extensive research (Liu et al., 2024; Ren et al., 2022; Fan et al., 2026). To address the challenges of small-sample rotational machinery fault diagnosis, Liang et al. (2023) proposed a Multi-Branch Dynamic Convolutional Network (MBSDCN) based on feature separation strategy and reconstruction attention mechanism. Hu et al. (2025) introduced a physics-constrained adaptive style transfer network (PCASTNet) for sample generation in cross-domain fault diagnosis, aiming to generate diagnostic samples for monitored machines under small-sample conditions. Meng et al. (2022) proposed an improved adversarial classification generative adversarial network (ACGAN) model using Wasserstein distance loss function to solve gradient vanishing problem, which enhances sample usability by adding labels to unlabeled fault samples. To address the limitations of deep learning algorithms in industrial fault diagnosis due to significant variations in fault samples caused by operational conditions, Ren et al. (2023) proposed a heterogeneous sample enhancement network (HSELL-Net) integrating lifelong learning, enabling reliable utilization of fault samples from other operating conditions for small-sample enhancement. Xing et al. (2026) proposed a multi-sensor spatiotemporal causal graph augmentation (MSCGA) fault diagnosis framework, integrating causal inference, sample generation, and fault diagnosis modules to establish a comprehensive small-sample diagnostic solution. Although many researchers have studied data imbalance and poor model generalization caused by limited samples, most of these studies focus on recognition or classification challenges, with few studies addressing crack size prediction. To tackle the above challenges, we develop an intelligent ultrasonic inspection scheme for fatigue cracks in coal mine drill pipes that combines physics-based simulation with a multi-objective transfer network. The approach starts from a detailed description of the drill pipe geometry and material properties, on top of which we construct physical models for ultrasonic wave propagation and crack-induced echoes. By running large-scale simulations with different crack depths, lengths, and locations, we generate a comprehensive dataset in which defect size and spatial distribution can be precisely controlled. Each simulated case produces labeled ultrasonic echo signals, forming a well-defined mapping among the drill pipe configuration, crack parameters and ultrasonic response in the source domain. On this simulated foundation, we further incorporate a small set of measurements collected from real drill pipes, which serve as target-domain samples. A domain-adversarial transfer learning strategy is then adopted to bring the simulated and real feature distributions into alignment. In particular, the network is trained to be insensitive to variations in coupling conditions, noise intensity, and equipment differences so that feature extractors learned predominantly from simulation can still operate reliably under field inspection conditions. The main contributions and innovations of this work are summarized as follows. (i) Physics-based ultrasonic propagation model and simulation dataset for coal mine drill pipes. Using realistic structural dimensions, material parameters and representative crack distribution patterns, we build a three-dimensional finite element model to simulate ultrasonic propagation in drill pipes. Cracks with various depths, lengths, and positions are embedded into the model so that the propagation and reflection of ultrasonic waves in defective pipes can be systematically reproduced. The simulations yield a large number of echo signals covering diverse crack scenarios. By controlling excitation waveforms and coupling conditions, key quantities such as crack depth are accurately labeled, providing high-quality source-domain training data for subsequent deep learning models. (ii) Simulation-driven multi-domain transfer learning for crack size estimation. We propose a transfer learning framework that relies mainly on abundant simulation data and only a limited amount of field measurements to recognize crack size. A deep neural network is designed specifically for crack depth estimation, where a multi-subdomain discriminator is attached to the feature extraction module and trained in an adversarial manner to align simulated and real features within a common representation space. To perform quantitative assessment, a regression-based prediction head is added at the task output layer to estimate crack depth and evaluate defect severity. This domain-adversarial transfer strategy allows the model to fully exploit the scalability of physics-based simulation data while enhancing its generalization ability and depth estimation accuracy when real samples are scarce.
The subsequent sections of this paper are organized as follows. In Section 2, a multiphysics model of ultrasonic propagation in threaded drill pipes is established and utilized to generate a large-scale simulation dataset under diverse crack sizes, locations, and noise conditions. Section 3 presents a crack-size identification method that integrates simulated ultrasonic signals with multi-domain transfer learning. Section 4 reports the experimental verification of the proposed approach for fatigue crack detection through both simulated and actual measurements. Section 5 summarizes the key findings and deliberates on potential directions for future research.
2. Multi-physics modeling of bulk-wave propagation in threaded drill pipes
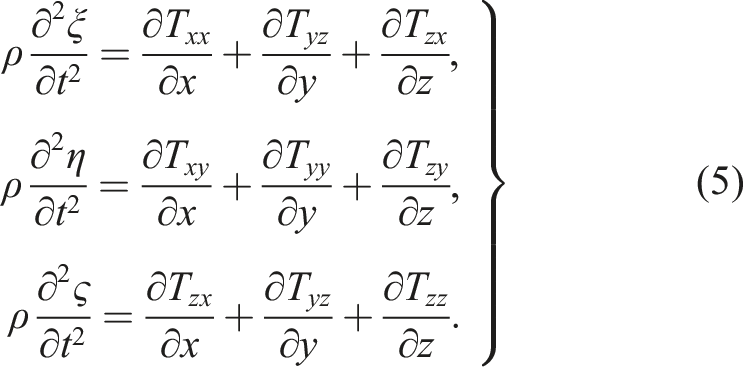
The propagation of acoustic waves in a drill pipe can be described using the same form of motion equation as that for coal in a solid medium. For a small differential element of the pipe, the resultant force along a given direction can be decomposed into three components. (1) The x-directed force on faces normal to the x-axis, that is, the component of the force in the x-direction acting on a surface whose outward normal is aligned with the x-axis. (2) The x-directed force on faces normal to the y-axis, namely, the x-direction component of the force acting on a surface whose normal is along the y-axis. (3) The x-directed force on faces normal to the z-axis, that is, the x-direction component of the force acting on a surface whose normal is along the z-axis.



The resultant force acting on the small element is obtained by summing the component forces of these three parts.

Let ρ be the medium density. According to Newton’s second law, the motion equation of this small element in the x-direction can be established. The motion equations in the y-and z-directions can be expressed as follows.
Substituting the equation of isotropic solids yields the following set of equations.
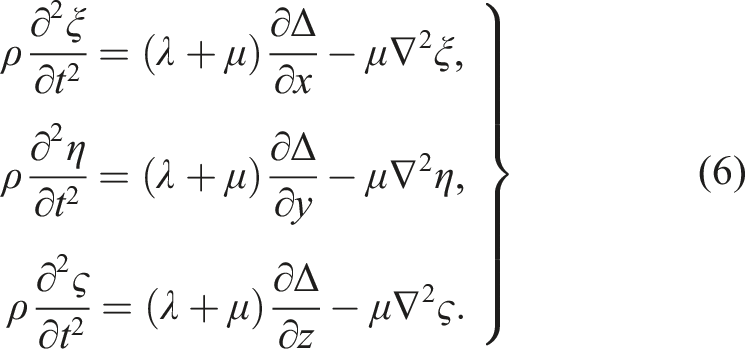

Given the relationship Δ = div s, the above expression can be rewritten as:

By using the well-known vector analysis relations grad (div s) = ∇2s + rot (rots), the above expression can be rewritten as:

Equation (9) can also be written in terms of the particle velocity vector v, giving:


Here, the sound speed satisfies c2 = λ/ρ = 1/β
s
ρ0, the density ρ in the general expression is replaced by the equilibrium density ρ0. Equation (11) thus represents the acoustic wave equation in a fluid written in terms of the particle velocity vector. By combining this relation with the linear momentum equation, it can be straightforwardly reformulated into the more familiar acoustic wave equation expressed in terms of the sound pressure p. According to vector analysis, any sufficiently smooth vector field can be decomposed into the sum of a gradient of a scalar potential and the curl of a vector potential, which underlies the above vector representation of acoustic motion.

Here, Φ denotes the scalar potential and ψ = ψ
x
i + ψ
y
j + ψ
z
k represents the vector potential. For fluid ψ = 0, equation (12) can be expressed in terms of velocity components.
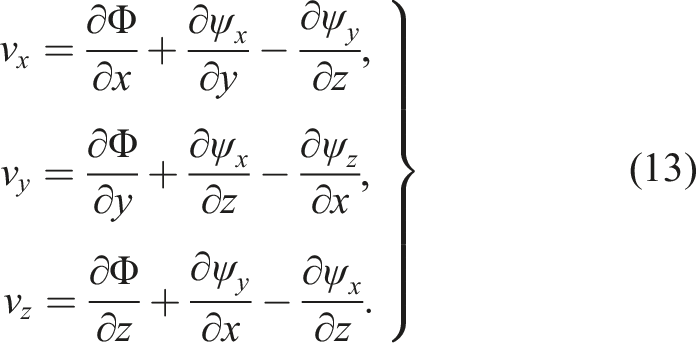
Substituting equation (13) into equation (12) allows the separation of scalar potential Φ and vector potential ψ, yielding two independent equations.
The vector potential can also be expressed by its components:

These results show that introducing two potential functions in an isotropic solid provides a convenient way to solve the wave equations. Once the explicit forms of the scalar and vector potentials are specified and substituted into the governing equations, the particle velocity field in the medium can be obtained. In equation (15), the first relation gives the phase velocity of longitudinal plane waves, the first equation describes the propagation speed of plane waves as
3. Multiple target transfer network
3.1. Multiple target transfer network architecture
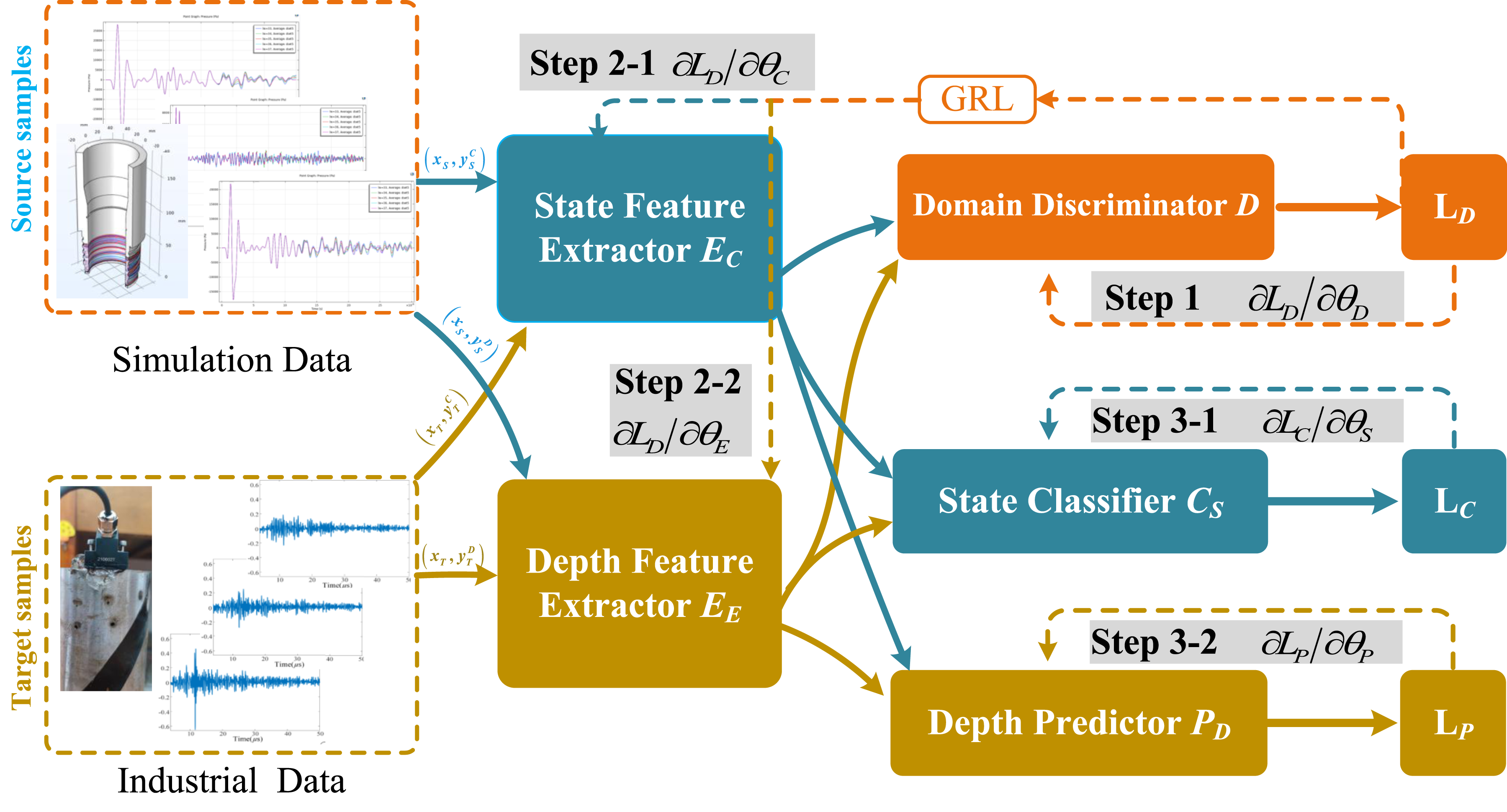
This research proposes a Multiple Target Transfer Network (MTTN) based on the conventional adversarial network. The network architecture is shown in Figure 1. MTTN includes a state feature extractor Illustration of the proposed MTTN architecture. (GRL denotes the gradient reversal layer, which reverses the sign of the gradient in back propagation).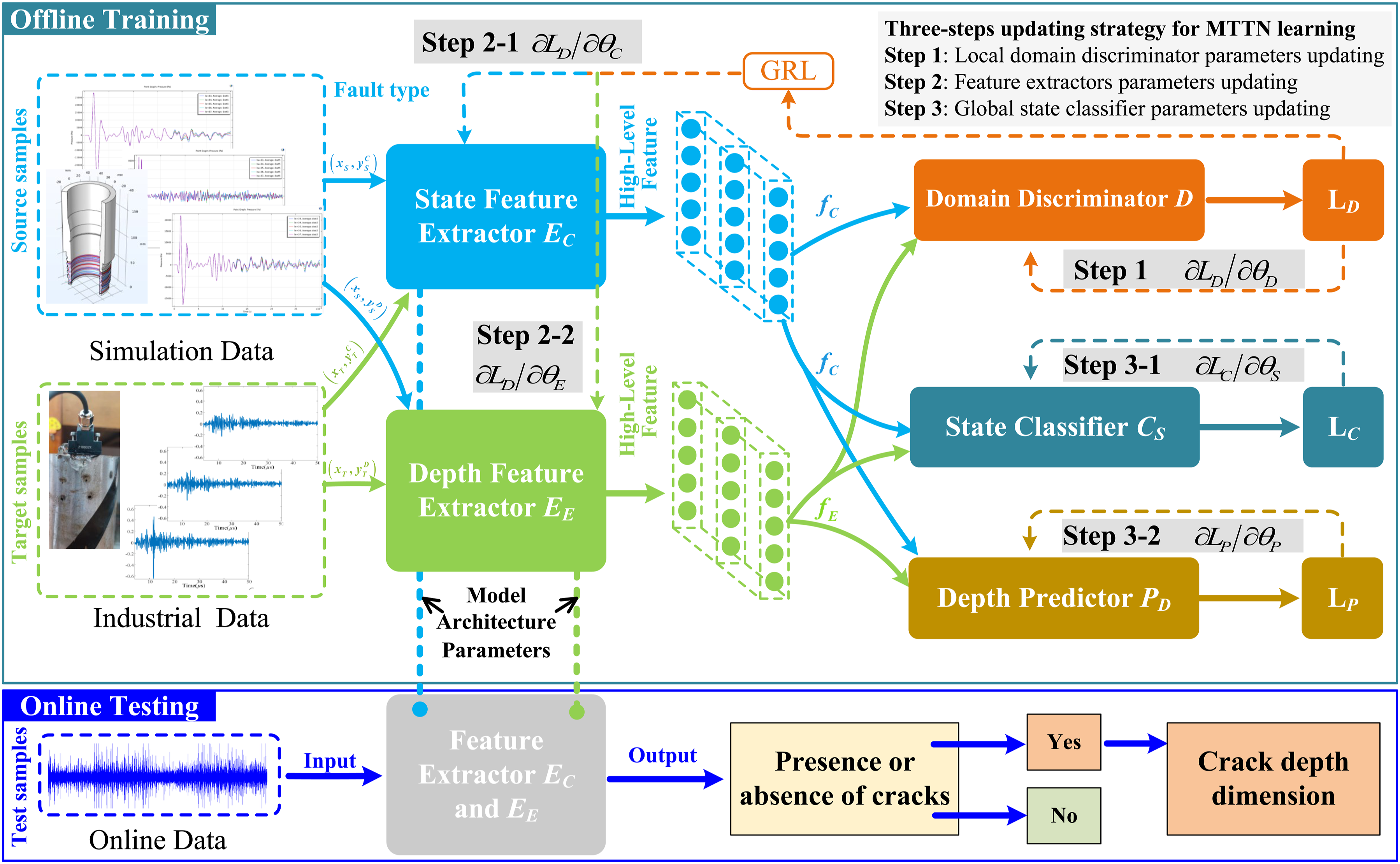
This paper proposes a multi-objective transfer network model with the following assumptions: sufficient source samples (physical simulation datasets) and limited target samples (real fault datasets). The sufficient source samples are denoted as
The advanced features f
C
and f
E
are obtained from the spatial mapping of the state feature extractor E
C
and the crack depth feature extractor E
E
, respectively, as shown in the following formula.

The E
C
and E
E
are the state feature extractor and the crack depth feature extractor, respectively, and their network structure is the same. The feature extractor and the domain discriminator constitute the adversarial network, the loss function is defined as Goodfellow et al. (2014):


To cope with the distribution shift between the source and target datasets, we adopt an adversarial domain adaptation training strategy. Two feature extractors, E
E
and E
E
, are first used to obtain high-level representations for samples from both domains. On top of these features, domain discriminators are introduced to judge whether a given feature comes from the source or the target domain: the loss term for target samples drives their discriminator outputs toward 0, whereas the term for source samples pushes the outputs toward 1. In this way, each discriminator is explicitly optimized to maximize its ability to distinguish the two domains. The feature extractors and domain discriminators are trained in an adversarial manner. While the discriminators seek to correctly classify source versus target features, the feature extractors are updated in the opposite direction so as to fool the discriminators, encouraging the extracted representations of the two domains to become as similar as possible. The parameters of the feature extractors and the domain discriminators are updated alternately, and after sufficient adversarial iterations the training process reaches a Nash equilibrium, where the feature distributions of the source and target domains are effectively aligned. Once the domain adaptation stage is completed, the learned high-level features are fed into a state classifier to perform the downstream recognition task. For this classifier, the standard cross-entropy loss is employed as the objective function, which is given in (19) and (20) (Ganin et al., 2016):
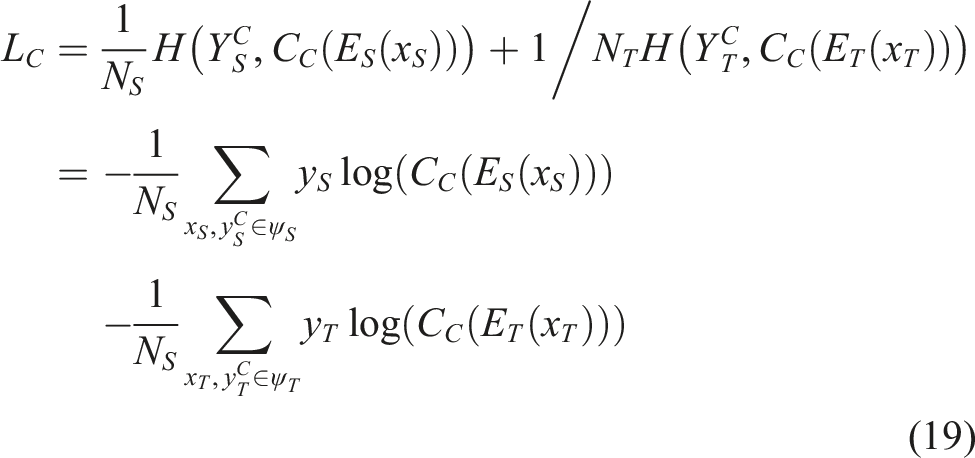
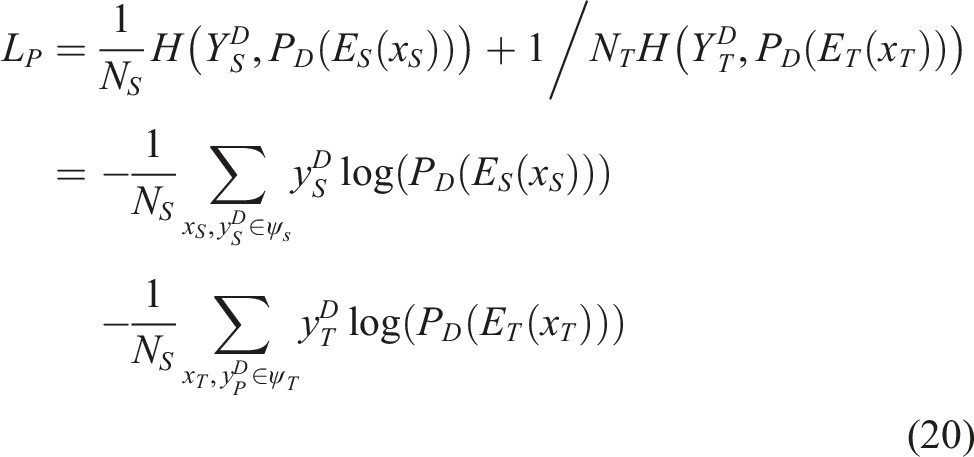
Here, H (⋅) denotes the cross-entropy function,
3.2. MTTN training
The optimization goal of training MTTN is to get the optimal parameters










4. Verification and results
4.1. Multi-physical field coupling modeling and simulation sample generation
In Comsol Multiphysics finite element analysis software, a two-dimensional finite element model of a fractured drill pipe is established based on its geometric and physical parameters, as shown in Figure 2. Two-dimensional finite element model of fractured drill pipe.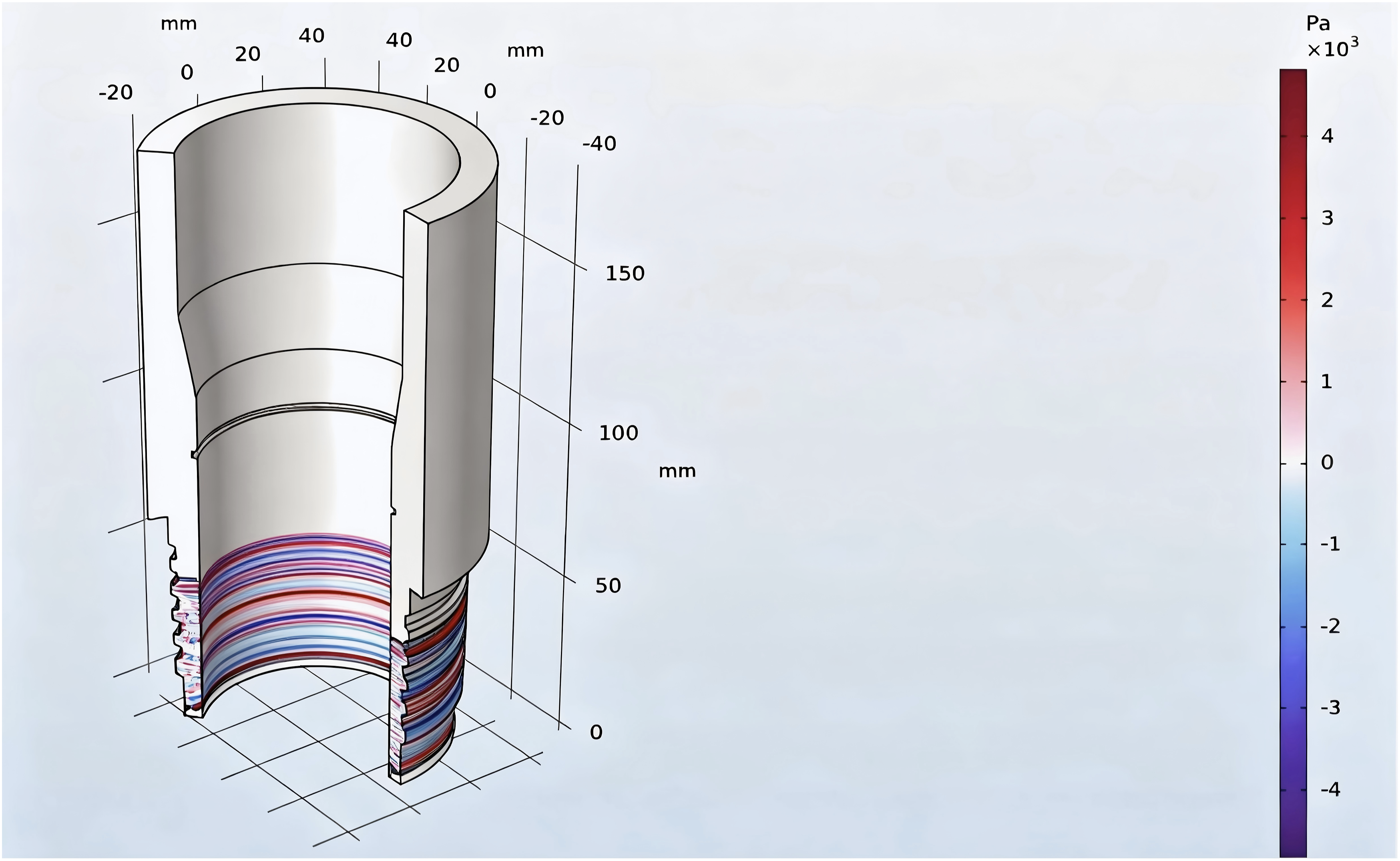
In the excitation of the piezoelectric element, a Gaussian pulse function with sine modulation is employed as the excitation source. The simulated crack width in this study is 1 mm, with an echo time of 16.61 μ s and an ultrasonic frequency of 1.1 MHz. The time-domain and frequency-domain plots of the acoustic pressure signal are shown in Figure 3. Acoustic pressure signal at 1.1 MHz. (a) Time-domain plot of the acoustic pressure signal, (b) Frequency-domain plot of the acoustic pressure signal.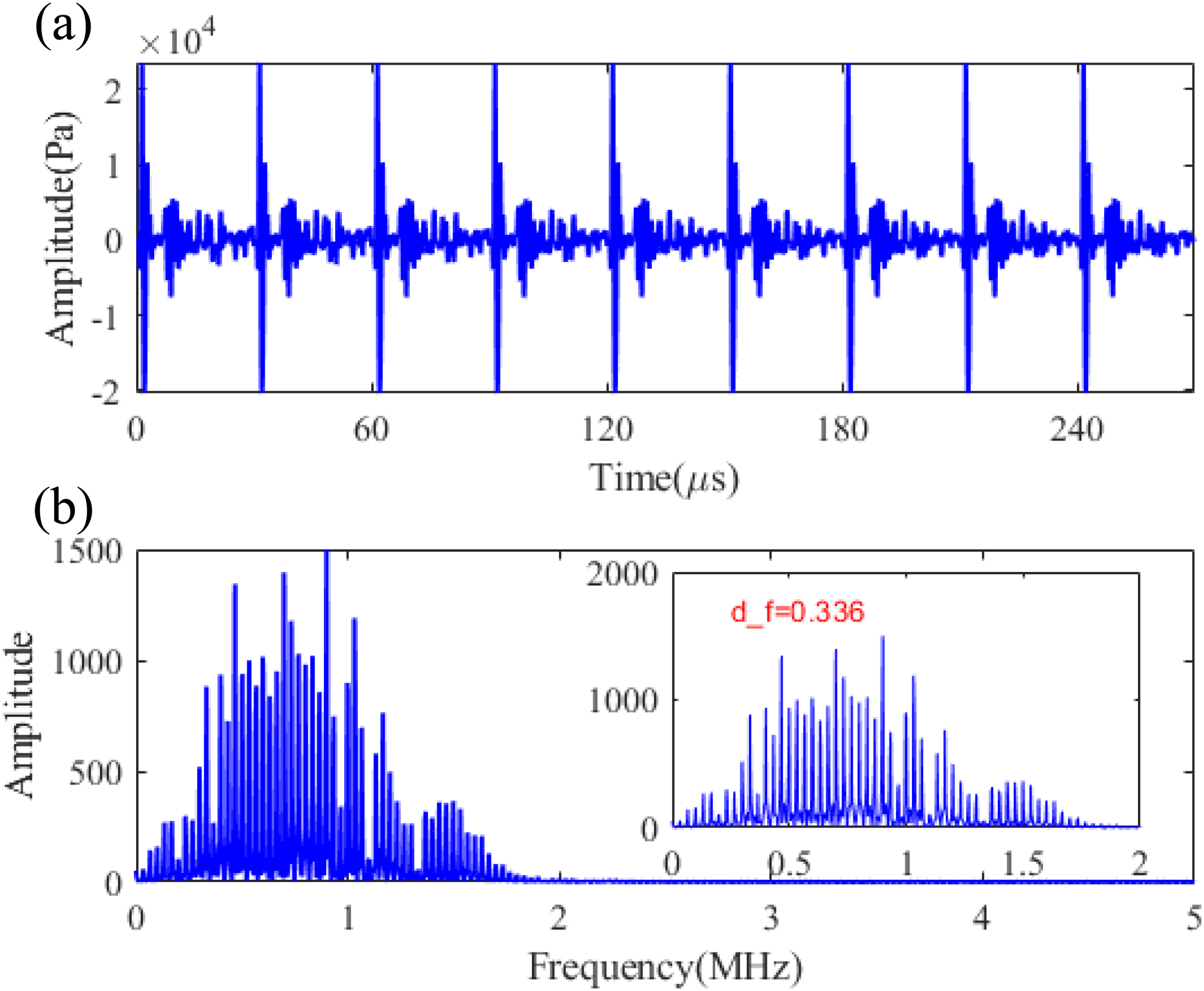
The simulated drill pipe cracks are set at depths of 0 mm, 1 mm, 2 mm, 3 mm, 4 mm, and 5 mm. The ultrasonic response at different crack depths is shown in Figure 4. Simulation of ultrasonic response at different crack depths. (a)–(f) show the ultrasonic responses from 0 mm to 5 mm, respectively.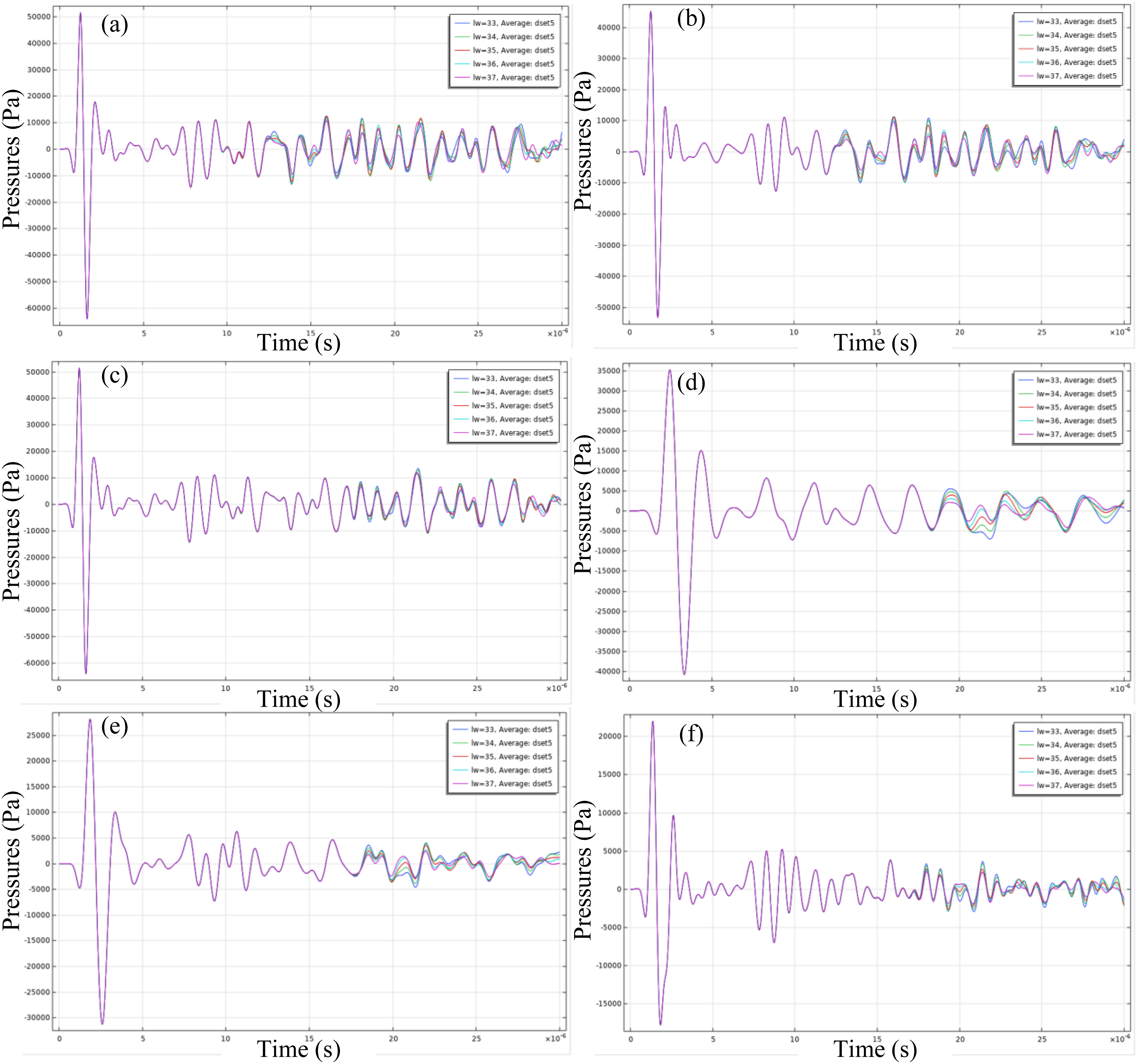
4.2. Experiment setup and signal acquisition
To assess the effectiveness of the proposed crack detection approach, an ultrasonic inspection platform is built, as illustrated in Figure 5. The setup consists of an Olympus 5073PR ultrasonic pulser–receiver, an Olympus C542-SM angled-beam probe with a center frequency of 2.25 MHz, a water-based couplant, a Tektronix TDS-2024C digital oscilloscope, and a dedicated fixture for clamping the probe to the drill pipe end. During testing, the pulser–receiver generates high-voltage excitation pulses, while the oscilloscope records the returning ultrasonic echoes displayed in real time. Experimental setup.
The experimental specimens are 4137H steel drill pipe joints with hollow male connectors, each 500 mm in length and 89 mm in outer diameter. The base material is known to contain inherent imperfections. To introduce controllable and repeatable crack-like defects, U-shaped surface slots of different depths were machined on the pipe surface so as to emulate the acoustic behavior of real cracks. To minimize mutual interference between neighboring defects and to obtain clearly distinguishable echo responses, only two artificial cracks were introduced on each pipe, positioned 120° apart around the circumference. In addition, echo signals from regions without defects were recorded and used as baseline reference data for comparison with signals from the damaged zones. Both artificial cracks were located 34 mm from the pipe end face. Each notch had a width of 1 mm and a length of 10 mm, while the slot depths were set to 1.5 mm, 2 mm, and 4 mm, respectively, to represent different damage severities. A water-based polymer couplant was applied between the probe and the pipe end face to enhance acoustic coupling and reduce reflection losses at the interface, thereby improving the transmission of ultrasonic energy into the pipe interior. During measurements, the probe was mounted on the threaded end face of the drill pipe using a clamping fixture to maintain stable, tight contact, which approximately reproduces the boundary conditions assumed for the piezoelectric excitation source in the numerical model. The pulser–receiver supplied the excitation waveform, and the resulting echo signals were captured by an oscilloscope at a sampling rate of 50 MHz for subsequent processing and analysis.
4.3. Experimental results and analysis
To evaluate the performance advantage of MTTN, we compare it with five representative state-of-the-art deep learning architectures, namely, Residual Network-18 (ResNet-18) (He et al., 2016; WDCNN Zhang et al., 2017; MK-ResCNN Liu et al., 2020; MBSDCN Liang et al., 2023; and ACGAN Meng et al., 2022), which are adopted as benchmark networks. To prevent overfitting in the experimental crack recognition model construction, this study selected samples with 1.5 mm crack depth as the test set. To comprehensively evaluate the proposed method’s performance, multiple performance metrics were applied to quantify the prediction results of drill pipe crack depth. Specifically, for point prediction, the evaluation metrics included mean square error (MSE), root mean square error (RMSE), mean absolute error (MAE), and coefficient of determination (R2).




The prediction interval coverage probability (PICP) is used to evaluate the prediction results of drill pipe crack depth. The evaluation index is defined as follows:

Test results of crack depth for different models.
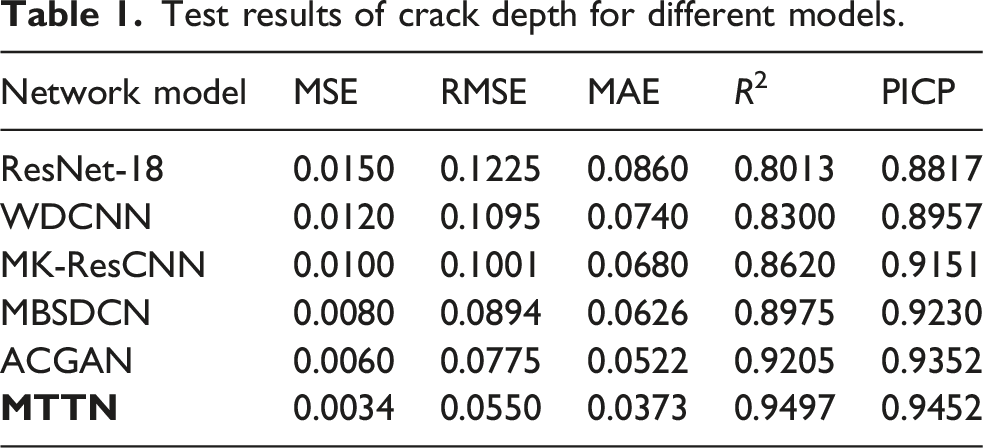
The Table 1 summarizes the quantitative results of crack-depth prediction for six neural network models: ResNet-18, WDCNN, MK-ResCNN, MBSDCN, ACGAN, and the proposed MTTN. Five metrics are used for evaluation, namely, mean squared error (MSE), root mean squared error (RMSE), mean absolute error (MAE), the coefficient of determination (R2), and prediction interval coverage probability (PICP). Among the baseline approaches, ResNet-18 produces relatively large MSE, RMSE, and MAE values, indicating limited accuracy in crack-depth estimation. WDCNN and MK-ResCNN reduce these errors to some extent, and MBSDCN and ACGAN further improve prediction performance, as evidenced by lower point-prediction errors together with higher R2 and PICP values. These observations suggest that incorporating multi-scale convolution and adversarial learning is beneficial for modeling the nonlinear relationship between ultrasonic features and crack depth. In comparison, the proposed MTTN achieves the best overall performance in Table 1. It attains the smallest MSE, RMSE, and MAE, along with the largest R2, implying that its predicted crack depths are closest to the true values. At the same time, MTTN yields the highest PICP, demonstrating that its prediction intervals cover the actual crack depths with higher probability while maintaining satisfactory interval sharpness. Therefore, the proposed model provides more accurate and reliable crack-depth estimates than the competing networks.
5. Conclusion
In this study, an ultrasonic intelligent detection framework is developed for fatigue cracks in coal mine drill pipes by combining physics based simulation with a multi-target transfer network (MTTN). A multi-physics finite element model of bulk-wave propagation in threaded drill pipes is established, in which cracks with different depths, lengths, and circumferential positions are embedded and excited by a Gaussian modulated pulse to generate a large, physically interpretable dataset of simulated echo signals for crack depths from 0 to 5 mm. Building on this source domain dataset, the proposed MTTN comprising state and depth feature extractors, a domain classifier, a crack state classifier, and a depth predictor uses adversarial learning to narrow the gap between simulated and real measurement domains in a shared feature space, while its multi-task design enables joint crack state classification and crack depth regression to strengthen feature robustness. The framework is experimentally validated on 4137H steel drill pipe joints with machined U-shaped slots using an ultrasonic inspection platform equipped with an Olympus 5073PR pulser receiver, a 2.25 MHz angled-beam probe and a Tektronix TDS-2024C oscilloscope; under realistic coupling conditions, MTTN achieves 100% accuracy in crack state identification and, compared with competing models, obtains the lowest MSE, RMSE, and MAE and the highes R2 and PICP for crack depth prediction, indicating accurate estimates and well calibrated prediction intervals.
From an engineering perspective, this work shows that combining physics-based simulation with domain adaptive deep learning is an effective way to address the scarcity of labeled crack data in coal mining and offers a practical route for intrinsically safe online monitoring of drill pipe integrity. Looking ahead, the methodology will be extended to fully three dimensional threaded geometries under more complex loading and coupling conditions, while semi-supervised or unsupervised domain adaptation strategies will be explored to further reduce reliance on labeled field data. In parallel, lightweight network architectures suitable for real time downhole deployment will be developed and validated through field trials in operating coal mines.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Open Fund of State Key Laboratory of Coal Mine Disaster Prevention and Control (2022SKLKF07), Digital Drilling Site Monitoring System for Directional Drilling in Coal Mines (2024YBXM43), College Students’ Innovation and Entrepreneurship Training Program Project (202411799012), Chongqing Natural Science Foundation (CSTB2023NSCQ-MSX0735, CSTB2024NSCQ-MSX0090), and Science and Technology Research Program of Chongqing Municipal Education Commission (Grant No. KJQN202400827).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.